Охранная система с дистанционным управлением
Содержание
Введение
1. Обзор существующих схем
1.1 Простейшая система оповещения
1.2 Ультразвуковое охранное устройство
1.3 Охранная система с голосовым оповещением по телефонной линии
1.4 Определение требований к охранной системе
2. Построение структурной схемы
3. Выбор и обоснование элементной базы
3.1 Особенности отечественных однокристальных микроконтроллеров
3.2 Особенности микроконтроллеров фирмы Atmel
3.3 Особенности микроконтроллеров фирмы Microchip
3.4 Основные характеристики PIC18F452
3.5 Выбор микроконтроллера
4. Построение принципиальной схемы
4.1 Построение блока питания
4.2 Построение блока индикации
4.3 Построение преобразователя уровня.
4.4 Подключение различных датчиков
4.5 Построение блока управления
4.6 Построение ПДУ
4.7 Расчёт потребляемой мощности
4.8 Расчёт блока питания
4.9 Расчет быстродействия
4.10 Расчёт надёжности
5. Разработка печатной платы
6. Базовое программное обеспечение
6.1 Блок-схема алгоритма работы микроконтроллера
6.2 Разработка программы поддержки
6.3 Среда проектирования
7. Экономическая часть
7.1 Расчёт себестоимости
7.2 Расчет заработной платы и статей калькуляции
8. Охрана труда и техника безопасности
8.1 Анализ опасных и вредных факторов при изготовлении устройства
8.2 Подготовка программ.
8.3 Изготовление печатной платы
8.4 Мероприятия, обеспечивающие безопасные условия труда при изготовлении устройства
8.5 Организационные мероприятия
8.6 Технические мероприятия
8.7 Вопрос экологии
8.8 Выводы по охране труда
Заключение
Список литературы
Приложение А. Листинг программы
Введение
Реализация концепции RISC-архитектуры в 8-разрядных микроконтроллерах существенно расширила среду их применения. К традиционным приложениям таких МК (телекоммуникации, системы сбора данных, системы охраны, автоэлектроника, системы отображения информации и т. д.) сегодня прибавляются такие, где раньше использовались только более мощные 16- и 32-разрядные процессоры с функцией цифровой обработки сигналов, например, обработка видеосигналов и векторное управление электроприводом. Продвижение 8-разрядных RISC-микроконтроллеров на этот рынок произошло во многом благодаря тому, что они нередко предлагают оптимальное соотношение производительности и цены.
Современные 8-разрядные RISC-микроконтроллеры занимают промежуточную нишу по своим техническим характеристикам между классическими 8-разрядными микроконтроллерами и их 16-разрядными кузенами. Высокая производительность и меньшая, чем у 16-разрядных МК, цена превращают RISC-микроконтроллеры в мощный инструмент для построения эффективных многофункциональных контроллеров, используемых в самых разнообразных приложениях. Особенно большую популярность RISC-микроконтроллеры получили в построении охранных систем.
На сегодняшний день различные охранные устройства пользуются большой популярностью. Их устанавливают в квартирах, учреждениях, на промышленных объектах. В связи с бурным развитием компьютерных технологий в последние годы, большинство учебных заведений широко внедряет в учебный процесс использование компьютеров. Закупаются новые компьютерные классы, и обновляется старый парк вычислительных машин. Стоимость современных компьютерных классов достаточно высока и в связи с этим возникает необходимость их охраны. Помимо охраны имущества от хищения необходима также защита от возникновения пожара.
Существует немало фирм, которые предлагают потребителю различные модификации охранных систем. Все они существенно различаются как функциональным возможностям, так и по цене. Большинство современных охранных систем имеют достаточно высокую стоимость, если имеют большой набор функций.
Целью данного дипломного проекта является создание недорогой многофункциональной охранной системы (далее ОС), отвечающей современным требованиям безопасности.
Основные задачи дипломного проекта следующие:
Обзор аналогов, определение требований к ОС.
Выбор элементной базы;
Разработка принципиальной схемы и печатной платы;
Разработка программного обеспечения;
Расчет себестоимости ОС.
1. Обзор существующих схем
1.1 Простейшая система оповещения
Схема простейшего охранного устройства приведена на рисунке 1.1.1. Объект, нуждающийся в охране, окружают по периметру медным обмоточным проводом диаметром 0,1...0,3 мм. Концы шлейфа подключают к электронному автомату через гнезда XS1. Пока шлейф не поврежден, через его небольшое сопротивление база транзистора VT1 соединена с эмиттером. В это время транзистор и тиристор VS1 закрыты, потребляемый устройством ток (около 100 мкА) определяется в основном сопротивлением резистора R1 и начальным током коллектора транзистора. При обрыве шлейфа на базу транзистора через резистор R1 подается отрицательное напряжение смещения, которое открывает транзистор. Через открывшийся транзистор и резистор R3 поступает положительное напряжение на управляющий электрод тиристора VS1.
Тиристор при этом открывается, срабатывает электромагнитное реле К1 и своими контактами (на схеме не показаны) включает звуковой сигнализатор, например электрический звонок. После устранения обрыва провода автомат устанавливают в исходное состояние (дежурный режим) кратковременным выключением питания (SA1).
Рисунок 1.1.1 – простейшее охранное устройство.
1.2 Ультразвуковое охранное устройство
Устройство состоит из датчика перемещения, звукового сигнала и автономного блока питания. Срабатывание звукового сигнала происходит при перемещении какого-нибудь предмета, при этом вначале подается короткий предупреждающий звуковой сигнал. Если в помещение зашел хозяин, этот сигнал предупредит его, что устройство сработало и его нужно выключить. Если же этого не сделать, то через минуту устройство подаст громкий звуковой сигнал, звучащий в течение нескольких минут, а затем снова перейдет в режим охраны.
Схема устройства показана на рисунке 1.2.1.. Генератор излучателя построен по схеме емкостной трехточки. Излучатель BQ1 включен в цепь обратной связи транзистора VT1, Частота колебаний генератора зависит от резонансной частоты излучателя BQ1 и параметров контура L1С1. Мощность излучения регулируют подбором резистора R3, а подстройку частоты производят подбором конденсатора С1.
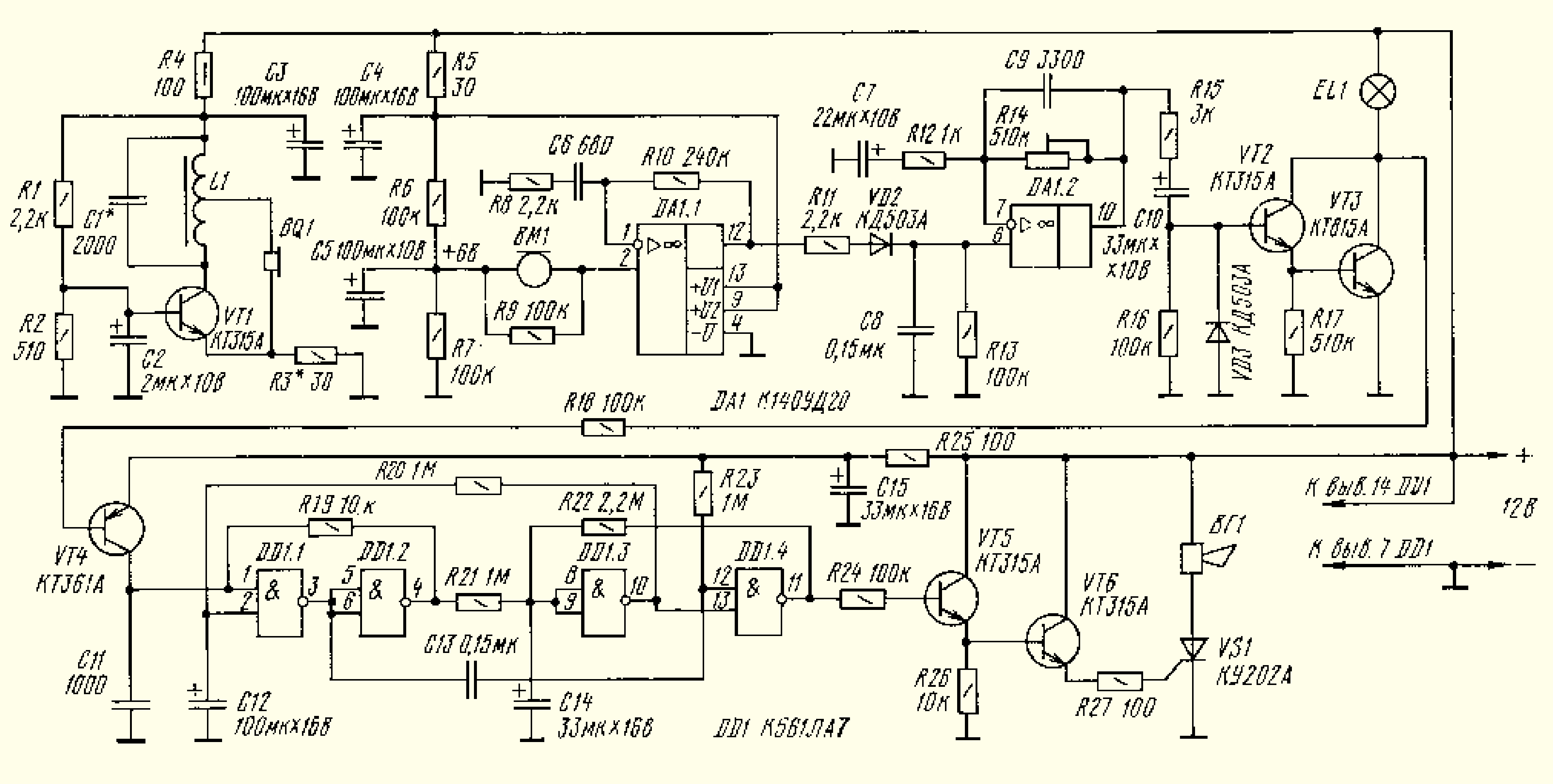
Рисунок 1.2.1 – ультразвуковое охранное устройство.
Приемник состоит из ультразвукового микрофона ВМ1, усилителя принимаемого сигнала на ОУ DA1.1, детектора на элементах R11, VD2, С8, R13, усилителя продетектированного сигнала на ОУ DA1,2 и транзисторного ключа VT2VT3. Параметры детектора подобраны таким образом, чтобы подавление несущей частоты в диапазоне 25...35 кГц было максимальным, а ослабление низкочастотных пульсаций 1...100 Гц — минимальным. Цепь C7R12C9R14 задает коэффициент усиления и полосу пропускания ОУ DA1.2, При появлении переменного напряжения на его выходе положительная полуволна через конденсатор С10 открывает транзисторный ключ VT2VT3, а отрицательная полуволна через диод VD3 перезаряжает конденсатор С10.
Сигнальное устройство включает в себя триггер Шмидта на элементах DD1 .1, DD1.2, узел управления на элементах DD1.3, DD1.4, усилитель тока на транзисторах VT5, VT6, тиристор VS1 и излучатель звукового сигнала BF1, При включении питания заряжается конденсатор С12, Примерно через 1 ,,,1,5 мин на выводе 2 элемента DD1 .1 возникает высокий уровень. Теперь, если сработает детектор перемещения, транзисторы VT2, VT3 и VT4 откроются, высокий уровень на выводе 1 элемента DD1.1 переключит триггер. На выходе DD1.1 возникнет низкий уровень, а на выходе триггера (вывод 4 DD1.2) — высокий. Цепь С13R23 задает длительность короткого звукового сигнала — 0,1 с, а цепь R21С1 4 — задержку подачи длительного звукового сигнала — 60 с. Цепь R20C12 определяет длительность звукового сигнала и задержку работы устройства после включения питания.
1.3 Охранная система с голосовым оповещением по телефонной линии
Данное устройство позволяет охранять помещение от посторонних при помощи лазерного датчика. При пересечении лазерного луча устройство выдает сигнал тревоги, производит набор номера телефона и выдаёт голосовое сообщение в телефонную линию. Устройство также позволяет защитить охраняемый объект от возникновения пожара.
Принципиальная схема устройства приведена на рисунке 1.3.2. Устройство построено на базе микропроцессора Z80 и состоит из следующих функциональных блоков, изображённых на рисунке 1.3.1.
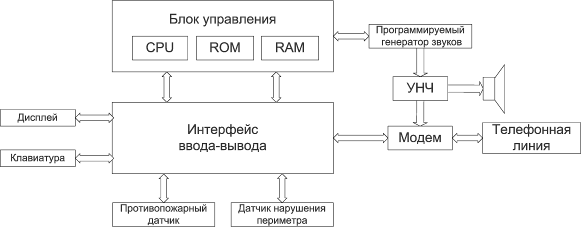
Рисунок 1.3.1 – Блок схема охранной системы
Блок управления состоит из микропроцессора, ОЗУ статического типа и ПЗУ, в котором зашита программа. Интерфейс ввода-вывода выполнен на микросхеме КР580ВВ55А, которая представляет собой программируемый интерфейсный адаптер (ПИА). К нему подключены клавиатура, дисплей, охранные датчики а также аналоговый компаратор, выполняющий функции модема. Для воспроизведения звука использован программируемый генератор звуков фирмы Yamaha.
Все настройки вводятся с клавиатуры. Устройство позволяет задавать пароль, ввод которого отключает режим охраны, громкость выдаваемого голосового сообщения а также номер телефона, по которому устройство будет звонить и сообщать сигнал тревоги.
Устройство позволяет использовать не только 6-значный городской номер, но и федеральный номер мобильного телефона а также междугородний. При вводе федерального номера нужно вводить цифру 8 для выхода на межгород.
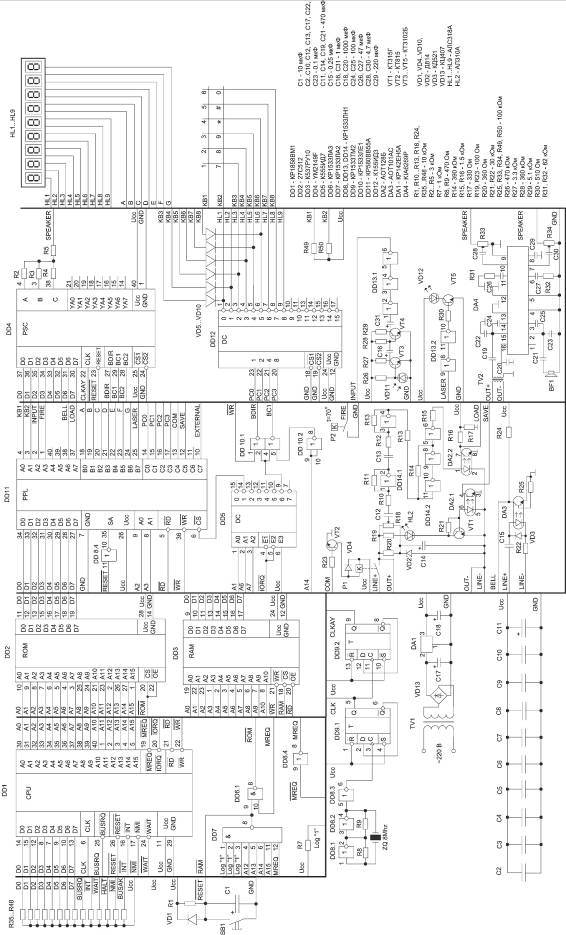
Рисунок 1.3.2 – охранная система с голосовым оповещением.
Поскольку набор производится программой, есть возможность отслеживать состояние телефонной линии и в том случае если она занята, производить повторный набор. После того как номер набран, выдерживается пауза в 5 секунд, в течение которых проверяется снята трубка или идут длинные гудки. Если прошло 6 длинных гудков и трубка не была снята, набор возобновляется.
1.4 Определение требований к охранной системе
Требования, предъявляемые к охранной системе следующие:
Большое количество подключаемых датчиков;
Универсальность и широкий набор функций;
Высокая надёжность устройства;
Удобный пользовательский интерфейс;
Низкая себестоимость устройства.
Исходя из требований, указанных выше, необходимо построить ОС на базе микроконтроллера с использованием современной элементной базы. Для обеспечения эргономичного пользовательского интерфейса необходимо иметь возможность подключения данной ОС к персональному компьютеру. Кроме того, должна быть возможность использования приведенных выше схем в качестве дополнения к данному устройству, что позволит сделать его более универсальным. Кроме того, для удобства в эксплуатации, система должна иметь возможность управления с пульта дистанционного управления (ПДУ).
2. Построение структурной схемы
Охранная система с дистанционным управлением построена на микроконтроллере, который осуществляет опрос датчиков, вывод на экран текущего состояния системы и температуры охраняемого объекта, управление 4-мя независимыми каналами освещения, а также обеспечивает обмен данными с персональным компьютером. Подключение к ПК осуществляется через интерфейс RS-232 на скорости 9600 кбит/с. Структурная схема ОС приведена на рисунке 2.1.

Рисунок 2.1 – структурная схема ОС с дистанционным управлением.
ОС контролирует состояние 9 входов, к которым могут быть подключены датчики различных типов. Если на одном из входов появляется лог. “1” и разрешено срабатывание данного датчика, то ОС переходит в режим тревоги, выдавая соответствующую команду на ПК. Кроме того, к микроконтроллеру подключен цифровой термометр по интерфейсу I2C. Кварцевый резонатор задаёт тактовую частоту работы микроконтроллера. Блок питания выдаёт напряжение питания устройства.
Ниже приведены электрические параметры ОС:
- Напряжение питания5 В
- Ток потребления304 мА
- Тактовая частота4 МГц
- Диапазон рабочих температур-10…+70 С
3. Выбор и обоснование элементной базы
Прежде всего, нужно выбрать микроконтроллер, на базе которого построена вся работа ОС.
3.1 Особенности отечественных однокристальных микроконтроллеров
Среди однокристальных микроконтроллеров (ОМК) отечественного производства наиболее перспективными являются БИС серии К1816, которые имеют два базовых элемента: К1816ВЕ48 (ВЕ48) и К1816ВЕ51 (ВЕ51).
Семейство ВЕ48 состоит из БИС ВЕ35, ВЕ39, ВЕ48 и ВЕ49. Каждая БИС представляет 8-разрядный ОМК, содержащий центральный процессор, оперативное запоминающее устройство (ОЗУ) данных, ПЗУ программ (не у всех БИС), многоканальный интерфейс ввода / вывода, восьмиразрядный таймер счетчик, векторную систему прерываний с приоритетом, тактовый генератор, устройство синхронизации. Микросхемы семейства ВЕ48 имеют идентичную структуру и отличаются лишь организацией внутренней памяти. Данные об ОМК семейства ВЕ48 приведены в таблице 3.1.
В ОМК ВЕ48 пользователь имеет возможность самостоятельно производить запись информации в память программ с последующим стиранием ультрафиолетом, в отличие от ВЕ49, где операции записи осуществляются с помощью отдельного шаблона в процессе изготовления БИС.
В каждом ОМК предусмотрена возможность расширения памяти программ до 4 Кбайт, памяти данных до 384 байт и увеличения числа линий ввода / вывода за счет подключения внешних БИС.
Таблица 3.1.1 – БИС семейства К1816Вехх
|
Тип БИС |
Память программ, Кбайт |
ОЗУ, Байт |
Тактовая частота, МГц |
|
ВЕ35 |
- |
64 |
6 |
|
ВЕ39 |
- |
128 |
11 |
|
ВЕ48 |
1 |
64 |
6 |
|
ВЕ49 |
1 |
128 |
11 |
Семейство ВЕ51 представляет собой дальнейшее расширение семейства ВЕ48 и состоит из БИС ВЕ31 и ВЕ51. Их отличие в том, что ВЕ31 не имеет внутренней памяти программ, а ВЕ51 имеет (4 Кбайт).
В состав ОМК ВЕ51 входят центральный 8 – разрядный процессор, ПЗУ программ (4 Кбайт), ОЗУ данных (128 байт), 32 линии прямого ввода / вывода, четыре тестируемых входа, канал последовательного ввода / вывода, два 16 – разрядных таймера / счетчика и двухуровневая система прерывания с пятью источниками запросов. Эти средства образуют резидентную часть ОМК, размещенную непосредственно в кристалле. Предусмотрена возможность расширения памяти программ до 64 Кбайт и памяти данных до 64 Кбайт, что реализуется подключением дополнительных БИС ПЗУ и ОЗУ.
БИС семейства К1816ВЕ51 изготавливаются по N-МОП-технологии, при этом они имеют значительный ток потребления, который составляет 150 мА. Этого недостатка лишены БИС семейства К1830ВЕ51. Эти БИС изготавливаются по КМОП-технологии и имеют малый ток потребления (18 мА при напряжении питания +5 В). Во всем остальном БИС семейства К1830ВЕ51 схожи с БИС семейства К1816ВЕ51.
3.2 Особенности микроконтроллеров фирмы Atmel
AVR-архитектура, на основе которой построены микроконтроллеры семейства AT90S, объединяет мощный гарвардский RISC-процессор с раздельным доступом к памяти программ и данных, 32 регистра общего назначения, каждый из которых может работать как регистр-аккумулятор, и развитую систему команд фиксированной 16-бит длины. Большинство команд выполняются за один машинный такт с одновременным исполнением текущей и выборкой следующей команды, что обеспечивает производительность до 1 MIPS на каждый МГц тактовой частоты.
32 регистра общего назначения образуют регистровый файл быстрого доступа, где каждый регистр напрямую связан с АЛУ. За один такт из регистрового файла выбираются два операнда, выполняется операция, и результат возвращается в регистровый файл. АЛУ поддерживает арифметические и логические операции с регистрами, между регистром и константой или непосредственно с регистром.
Регистровый файл также доступен как часть памяти данных. 6 из 32-х регистров могут использоваться как три 16-разрядных регистра-указателя для косвенной адресации. Старшие микроконтроллеры семейства AVR имеют в составе АЛУ аппаратный умножитель.
Базовый набор команд AVR содержит 120 инструкций. Инструкции битовых операций включают инструкции установки, очистки и тестирования битов.
Все микроконтроллеры AVR имеют встроенную FLASH ROM с возможностью внутрисхемного программирования через последовательный 4-проводной интерфейс.
Периферия МК AVR включает: таймеры-счётчики, широтно-импульсные модуляторы, поддержку внешних прерываний, аналоговые компараторы, 10-разрядный 8-канальный АЦП, параллельные порты (от 3 до 48 линий ввода и вывода), интерфейсы UART и SPI, сторожевой таймер и устройство сброса по включению питания. Все эти качества превращают AVR-микроконтроллеры в мощный инструмент для построения современных, высокопроизводительных и экономичных контроллеров различного назначения.
В рамках единой базовой архитектуры AVR-микроконтроллеры подразделяются на три подсемейства:
Classic AVR — основная линия микроконтроллеров с производительностью отдельных модификаций до 16 MIPS, FLASH ROM программ 2–8 Кбайт, ЕEPROM данных 64–512 байт, SRAM 128–512 байт;
mega AVR с производительностью 4–6 MIPS для сложных приложений, требующих большого обьёма памяти, FLASH ROM программ 64–128 Кбайт, ЕEPROM данных 64–512 байт, SRAM 2–4 Кбайт, SRAM 4 Кбайт, встроенный 10-разрядный 8-канальный АЦП, аппаратный умножитель 8ґ8;
tiny AVR — низкостоимостные микроконтроллеры в 8-выводном исполнении имеют встроенную схему контроля напряжения питания, что позволяет обойтись без внешних супервизорных микросхем.
AVR-микроконтроллеры поддерживают спящий режим и режим микропотребления. В спящем режиме останавливается центральное процессорное ядро, в то время как регистры, таймеры-счётчики, сторожевой таймер и система прерываний продолжают функционировать. В режиме микропотребления сохраняется содержимое всех регистров, останавливается тактовый генератор, запрещаются все функции микроконтроллера, пока не поступит сигнал внешнего прерывания или аппаратного сброса. В зависимости от модели, AVR-микроконтроллеры работают в диапазоне напряжений 2,7–6 В либо 4–6 В (исключение составляет Attiny12V с напряжением питания 1,2 В).
Средства отладки. ATMEL предлагает программную среду AVR-studio для отладки программ в режиме симуляции на программном отладчике, а также для работы непосредственно с внутрисхемным эмулятором. AVR-studio доступен с WEB-страницы ATMEL, содержит ассемблер и предназначен для работы с эмуляторами ICEPRO и MegaICE. Ряд компаний предлагают свои версии Си-компиляторов, ассемблеров, линковщиков и загрузчиков для работы с микроконтроллерами семейства AVR. Микроконтроллеры ATMEL широко применяются в России и, как следствие, программируются многими отечественными программаторами. Ряд российских фирм предлагает также различные аппаратные средств отладки AVR-микроконтроллеров
3.3 Особенности микроконтроллеров фирмы Microchip
Система команд базового семейства PIC165x содержит только 33 команды. Все команды (кроме команд перехода) выполняются за один машинный цикл (или четыре машинных такта) с перекрытием по времени выборок команд и их исполнения, что позволяет достичь производительности до 5 MIPS при тактовой частоте 20 МГц.
Микроконтроллеры PIC имеют симметричную систему команд, позволяющую выполнять операции с любым регистром, используя любой метод адресации.
В настоящее время MICROCHIP выпускает четыре основных семейства 8-разрядных RISC-микроконтроллеров, совместимых снизу вверх по программному коду:
базовое семейство PIC15Cx с 12-разрядными командами, простые недорогие микроконтроллеры с минимальной периферией;
PIC12Cxxx с 12-разрядными командами со встроенным тактовым генератором, выпускаемые в миниатюрном 8-выводном исполнении.
Mid-range PIC16x/7x/8x/9x с 14-разрядными командами. Наиболее многочисленное семейство, объединяющее микроконтроллеры с разнообразными периферийными устройствами, в число которых входят аналоговые компараторы, аналогово-цифровые преобразователи, контроллеры последовательных интерфейсов SPI, USART и I2C, таймеры-счётчики, модули захвата/сравнения, широтно-импульсные модуляторы, сторожевые таймеры, супервизорные схемы и так далее;
High-end PIC17C4x/5xx высокопроизводительные микроконтроллеры с расширенной системой команд 16-разрядного формата, работающие на частоте до 33 МГц, с объёмом памяти программ до 16 Кслов. Кроме обширной периферии почти все микроконтроллеры этого семейства имеют встроенный аппаратный умножитель 8x8, выполняющий операцию умножения за один машинный цикл.
• PIC18. Новое семейство FLASH-микроконтроллеров с функцией самопрограммирования; работающие на частоте до 40 МГц, с объёмом памяти программ до 64 Кслов. Быстродействие 10 MIPS при тактовой частоте 10 МГц; Архитектура и система команд оптимизирована под компилятор Си; Аппаратное умножение 8-разрядных чисел за один машинный такт. Большой объем памяти на кристалле. Многообразие встроенных периферийных модулей.
• DsPIC30. 16-и разрядные цифровые сигнальные микроконтроллеры. Имеют свыше 64 кбайт слов, 8 кбайт RAM и 4 кбайт EEPROM – памяти. Быстродействие свыше 30 MIPS.
Особый акцент MICROСHIP делает на максимально возможное снижение энергопотребления для выпускаемых микроконтроллеров. При работе на частоте 4 МГц PIC-контроллеры, в зависимости от модели, имеют ток потребления меньше 1,5 мА, а при работе на частоте 32,768 КГц — ниже 15 мкА. Поддерживается “спящий” режим работы. Диапазон питающих напряжений PIC-контроллеров составляет 2,0…6,0 В.
Из программных средств отладки наиболее известны и доступны различные версии ассемблеров, а также интегрированная программная среда MPLAB. Российские производители программаторов и аппаратных отладочных средств также уделяют внимание PIC-контроллерам. Выпускаются как специализированные программаторы, такие как PICPROG, программирующие почти весь спектр PIC-микроконтроллеров, так и универсальные: UNIPRO, СТЕРХ, поддерживающие наиболее известные версии PIC.
Выбор микроконтроллера.
Для определения типа микроконтроллера необходимо подсчитать нужное количество портов ввода-вывода. Для управления ЖК-дисплеем необходимо 11 линий ввода-вывода (8 линий – шина данных, 3 линии – управляющие сигналы). Для подключения термодатчика по I2C интерфейсу требуется 2 линии ввода-вывода, для подключения к ПК – 2 линии. Для подключения приёмника ИК-сигналов – 1 линия. Для использования системы импульсно-фазового управления требуется 1 лини порта, на который через делитель будет подаваться пульсирующее напряжение, снимаемое с блока питания до стабилизатора. Для управления высоковольтной нагрузкой – 4 линии. Для подключения внешних датчиков и управления ведомой ОС – 12 линий ввода-вывода. Исходя из этого, выбираем микроконтроллер PIC18F452 (рисунок 3.1), который имеет 33 линии ввода-вывода, аппаратную поддержку интерфейсов USART и I2C.
Рисунок 3.1 – микроконтроллер PIC18F452
В таблице 3.4.1 приведено функциональное назначение выводов микроконтроллера PIC18F452.
После выбора микроконтроллера необходимо выбрать остальные элементы принципиальной схемы.
Для построения цепи питания микросхем будет использована типовая схема включения стабилизатора напряжения LM7806, на выходе которого получаем +5В. На вход стабилизатора допускается подача напряжения до 20В. Непосредственно перед стабилизатором стоит цепочка VD2, C7. Конденсатор С7 служит для сглаживания пульсаций питающего напряжения, полученного с диодного моста VD1. Диод VD2 необходим для правильного функционирования системы импульсно-фазового управления (СИФУ). Конденсатор C8 служит для подавления высокочастотных помех по питанию.
Для стабильной работы микроконтроллера будет использована цепочка внешнего генератора, состоящей из кварцевого резонатора на 4 МГц и конденсаторов С1,С2, емкостью 20 пФ, рекомендованной фирмой Microchip.
Таблица 3.4.1 – назначение выводов микроконтроллера
|
Обозначение вывода |
№ вывода |
Тип I/O/P |
Тип буфера |
Описание |
|
OSC1/CLKIN |
13 |
I |
ST/CMOS |
Вход генератора / вход внешнего тактового сигнала |
|
OSC2/CLKOUT |
14 |
O |
- |
Выход генератора. Подключается кварцевый или керамический резонатор. |
|
-MCLR/VPP |
1 |
I\P |
ST |
Вход сброса микроконтроллера или вход напряжения программирования. Сброс микроконтроллера происходит при низком логическом уровне сигнала на входе. |
|
RA0/AN0 RA1/AN1 RA2/AN2/VREF- RA3/AN3/VREF+ RA4/T0CKI RA5/-SS/AN4 |
2 3 4 5 6 7 |
I/O I/O I/O I/O I/O I/O |
TTL TTL TTL TTL ST TTL |
Двунаправленный порт ввода/вывода PORTA. RA0 может быть настроен как аналоговый канал 0 RA1 может быть настроен как аналоговый канал 1 RA2 может быть настроен как аналоговый канал 2 или вход отрицательного опорного напряжения RA3 может быть настроен как аналоговый канал 3 или вход положительного опорного напряжения RA4 может использоваться в качестве входа внешнего тактового сигнала для TMR0. Выход с открытым стоком. RA1 может быть настроен как аналоговый канал 1 или вход выбора микросхемы в режиме ведомого SPI |
|
RB0/INT RB1 RB2 RB3/PGM RB4 RB5 RB6/PGC RB7/PGD |
33 34 35 36 37 38 39 40 |
I/O I/O I/O I/O I/O I/O I/O I/O |
TTL/ST TTL TTL TTL TTL TTL TTL\ST TTL\ST |
Двунаправленный порт ввода/вывода PORTB. PORTB имеет программно подключаемые подтягивающие резисторы на входах. RB0 может использоваться в качестве входа внешних прерываний. RB3 может использоваться в качестве входа для режима низковольтного программирования. Прерывания по изменению уровня входного сигнала. Прерывания по изменению уровня входного сигнала. Прерывания по изменению уровня входного сигнала. Тактовый вход в режиме программирования. Прерывания по изменению уровня входного сигнала. |
|
Таблица 3.4.2 – продолжение |
||||
|
RC0/T1OSO/T1CKI RC1/T1OSI/CCP2 RC2/CCP1 RC3/SCK/SCL RC4/SDI/SDA RC5/SDO RC6/TX/CK RC7/RX/DT |
15 16 17 18 23 24 25 26 |
I/O I/O I/O I/O I/O I/O I/O I/O |
ST ST ST ST ST ST ST ST |
Двунаправленный порт ввода/вывода PORTC. RC0 может использоваться в качестве выхода генератора TMR1 или входа внешнего тактового сигнала для TMR1. RC1 может использоваться в качестве входа генератора для TMR1 или вывода модуля CCP2. RC2 может использоваться в качестве вывода модуля CCP1. RC3 может использоваться в качестве входа/выхода тактового сигнала в режиме SPI и I2C. RC4 может использоваться в качестве входа данных в режиме SPI или вход/выход данных в режиме I2C. RC5 может использоваться в качестве выхода данных в режиме SPI. RC6 может использоваться в качестве вывода передатчика USART в асинхронном режиме или вывода синхронизации USART в синхронном режиме. RC6 может использоваться в качестве вывода приемника USART в асинхронном режиме или вывода данных USART в синхронном режиме. |
|
RD0/PSP0 RD1/PSP1 RD2/PSP2 RD3/PSP3 RD4/PSP4 RD5/PSP5 RD6/PSP6 RD7/PSP7 |
19 20 21 22 27 28 29 30 |
I/O I/O I/O I/O I/O I/O I/O I/O |
ST/TTL ST/TTL ST/TTL ST/TTL ST/TTL ST/TTL ST/TTL |
Двунаправленный порт ввода/вывода PORTD или ведомый параллельный порт для подключения к шине микропроцессора |
|
RE0/-RD/AN5 RE1/-WR/AN6 RE2/-CS/AN7 |
8 .9 10 |
I/O I/O I/O |
ST/TTL ST/TTL ST/TTL |
Двунаправленный порт ввода/вывода PORTE. RE0 может использоваться в качестве управляющего входа чтения PSP или аналогового канала 5 RE1 может использоваться в качестве управляющего входа записи PSP или аналогового канала 6 RE2 может использоваться в качестве управляющего входа выбора PSP или аналогового канала 7 |
|
VSS |
12,31 |
P |
- |
Общий вывод для внутренней логики и портов ввода/вывода |
|
VDD |
11,32 |
P |
- |
Положительное напряжение питания для внутренней логики и портов ввода/вывода |
В качестве индикатора используется жидкокристаллический модуль, который позволяет отображать две строки по 16 символов. Для управления ЖКИ выделим порты D и E.Порт D подключен к шине данных модуля, порт Е к управляющим входам модуля.
Для подключения устройства к последовательному порту ПК необходимо преобразовать логические уровни сигналов уровни, используемые в интерфейсе RS-232. Для этого необходим преобразователь, собранный на микросхеме MAX232.
Цифровой термометр подключен к 3 и 4 битам порта C.
Силовые ключи на симисторах подключены к 1, 2, 3 5 битам порта C.
ИК-приёмник подключен к 0 биту порта B. К 1 биту данного порта подведена линия от выпрямителя для подачи пульсирующего напряжения для синхронизации в режиме СИФУ.
Внешние датчики подключены к остальным линиям портов ввода-вывода.
4. Построение принципиальной схемы
По построенной структурной схеме и выбранной элементной базе строю принципиальную схему. Схема электрическая принципиальная и перечень элементов приведены в ПРИЛОЖЕНИИ В.
За ядро всего устройства выбран PIC контроллер серии PIC18F452. Данный выбор придаёт устройству гибкость, низкую стоимость, упрощает процесс проектирования. Частоту тактового генератора для микроконтроллера выбираю 4 МГц для оптимальной настройки внутренних таймеров, используемых при опросе ИК-приёмника, внешних датчиков и обмене данными с ПК.
4.1 Построение блока питания
Блок питания состоит из трансформатора Т1, диодного моста VD1, ограничивающего диода VD2, конденсаторов C1 и C2, стабилизатора в интегральном исполнении LM7806. Переменное напряжение с трансформатора поступает на диодный мост, выпрямляется и через диод VD2 поступает на стабилизатор. Данный диод необходим для того, чтобы сглаживающий конденсатор C1 не оказывал влияние на пульсирующее напряжение, подаваемое на вход синхронизации для работы СИФУ.
4.2 Построение блока индикации
Для построения блока индикации использован ЖК-модуль MT16S2D фирмы МЭЛТ. Данный ЖКИ позволяет отображать две строки по 16 символов и имеет встроенный знакогенератор, что значительно упрощает написание процедуры для вывода информации на дисплей. Данный ЖКИ имеет сравнительно невысокую стоимость, малое энергопотребление и, что самое главное, наглядное отображение информации. Резистор R19 необходим для задания контрастности ЖКИ. Чем меньше сопротивление данного резистора, тем выше контрастность и наоборот.
4.3 Построение преобразователя уровня
В качестве преобразователя уровня использована микросхема MAX232 фирмы MAXIM. Она преобразует сигналы ТТЛ уровня в уровни последовательного порта ПК. Данная микросхема имеет малое количество внешних элементов, сравнительно невысокую стоимость и не требует настройки. Конденсаторы C3…C6 необходимы для задания рабочего режима микросхемы.
В качестве ИК-приёмника использована микросхема TSOP1730 фирмы VISHAY TELEFUNKEN. Данный приёмник имеет на входе частотный фильтр на 36 кГц, который необходим для подавления помех от нагревательных приборов и иных источников инфракрасного излучения. Данный приёмник позволяет производить приём данных на скорости до 1200 бит\с.
4.4 Подключение различных датчиков
Цифровой термометр выполнен на микросхеме DS1621 фирмы Dallas semiconductor. Данная микросхема подключается по интерфейсу I2C в качестве ведомого устройства и позволяет производить обмен данными на скорости до 400 кГц (высокоскоростной режим работы). Микросхема имеет встроенную функцию термостата и позволяет подключать к сильноточному порту вывода ключ для управления нагрузкой. Максимальный втекающий ток порта 1мА, вытекающий – 4мА. Диапазон измеряемых температур лежит в пределах от -55о до +125о С. Подтягивающие резисторы R17 и R18 необходимы для правильного функционирования интерфейса I2C.
Оптроны DA3 и DA4, подключенные к портам микроконтроллера, служат для гальванической развязки при подключении внешних датчиков разбития окна и открывания двери. К остальным входам портов подключены подтягивающие резисторы R4, R9…R16, которые служат для создания потенциала логического “0”. Оптроны на данных входах отсутствуют. Это сделано для снижения себестоимости всего устройства и при необходимости гальваническая развязка может быть установлена вне ОС.
К портам ввода вывода могут быть подключены различные датчики. Если один из датчиков срабатывает, он должен выставлять на данный порт логическую “1”, в противном случае он остается в состоянии логического “0”. На каждой линии ввода-вывода, куда подключаются датчики, установлены подтягивающие резисторы для исключения влияния наводок и помех на работу микроконтроллера.
4.5 Построение блока управления
Для управления нагрузкой используются силовые ключи, выполненные на оптосимисторах DA6…D8 и мощных симисторах VS1…VS4. Оптосимисторы необходимы для гальванической развязки микроконтроллера с высоковольтной частью схемы. Резисторы R21…R22 служат для ограничения тока, протекающего через внутренние светодиоды оптосимисторов. Мощные симисторы позволяют коммутировать нагрузку, мощностью до 1 кВт на каждый канал, если установлены на теплоотвод.
4.6 Построение ПДУ
Для управление ОС необходимо создать ПДУ, которое будет выдавать четыре различных команды. Его схема приведена на рисунке 4.6.1.
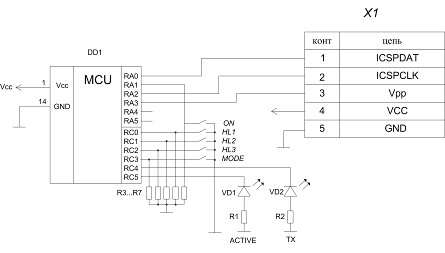
Рисунок 4.6.1 – принципиальная схема ПДУ.
ПДУ построено на микроконтроллере PIC16F630. Данный микроконтроллер выбран из-за его низкой стоимости.
К порту RC4 подключен ик-диод, формирующий импульсы, которые создают пакет данных. К порту RC5 подключен красный светодиод, предназначенный для индикации рабочего режима. RA0, RA2, RA3 подключены к разъёму внутрисхемного программирования. Это позволяет производить перепрограммирование памяти данных микроконтроллера, в которой храниться передаваемый пароль. Формат передаваемого пакета подробно описан в разделе 6.1. Для передачи команды необходимо сначала нажать клавишу “ON”, после чего загорится светодиод на 5 секунд. В это время необходимо нажать клавишу для передачи команды, иначе светодиод погаснет и ПДУ переходит в SLEEP режим для снижения энергопотребления. Это сделано для того чтобы увеличить срок службы батарей, от которых питается ПДУ.
4.7 Расчёт потребляемой мощности
Потребляемая мощность схемы определяется по формуле:
 (4.7.1)
(4.7.1)
где Рсх – потребляемая мощность схемы, Вт;
Рпот. I – потребляемая мощность i-ой группы элементов, Вт;
n – количество групп.
Потребляемая мощность группы элементов определяется по формуле:
Рпот = Р * m, (4.7.2)
где Р – потребляемая мощность одним элементом, Вт;
m – количество элементов.
Вначале считаем мощность потребляемую резисторами по формуле:
 (4.7.3)
(4.7.3)
где –
мощность i-ого резистора, мВт;
–
мощность i-ого резистора, мВт;
 - ток, протекающий через резистор;
- ток, протекающий через резистор;
U – напряжение на i-том резисторе.
Ток, протекающий через i-й элемент рассчитывается по формуле:
 (4.7.3)
(4.7.3)
где – сопротивление i-ого резистора, мВт;
– сопротивление i-ого резистора, мВт;
–
ток, протекающий через i-й резистор;
U– напряжение на i-ом резисторе.
Все расчеты, произведённые по данным формулам занесены в таблицу 4.7.1.
Таблица 4.7.1 – расчёт мощности на резисторах
|
№ |
Сопротивление, Ом |
Протекающий ток, мА |
Потребляемая мощность, мВт |
|
1 |
10000 |
0,5 |
2,5 |
|
2 |
10000 |
0,5 |
2,5 |
|
3 |
10000 |
0,5 |
2,5 |
|
4 |
10000 |
0,5 |
2,5 |
|
7 |
270 |
18,5 |
92,4 |
|
8 |
270 |
18,5 |
92,4 |
|
9…16 |
10000 |
0,5 |
2,5 |
|
17, 18 |
10000 |
0,5 |
2,5 |
|
19 |
1000 |
5 |
25 |
|
20…23 |
270 |
18,5 |
92,4 |
|
24…27 |
1000 |
5 |
25 |
|
28 |
24000 |
0.21 |
1 |
Мощность, потребляемая резисторами составляет 715 мВт.
Далее производим расчёт потребляемой мощности активными элементами схемы. Список активных элементов приведен в таблице 4.7.2.
Таблица 4.7.2 – расчёт потребляемой мощности активными элементами.
|
Обозначение |
Ток потребления, мА |
Мощность, мВт |
|
DD1 |
4 |
20 |
|
DD2 |
36 |
180 |
|
DD3 |
1 |
5 |
|
DA3, DA4 |
40 |
200 |
|
DA5…DDA8 |
80 |
400 |
|
DA9 |
1 |
1 |
Мощность, потребляемая активными элементами схема составляет 806 мВт.
Общая мощность, потребляемая схемой составит:
715мВт + 806мВт = 1521мВт.
4.8 Расчёт блока питания
Ток нагрузки вычисляется по формуле:

где P – потребляемая мощность;
Uн – напряжение нагрузки.
 A
A
Расчёт выпрямителя.
Исходными данными для расчета
служат: требуемое напряжение на нагрузке
( )
и потребляемый ток (
)
и потребляемый ток ( ).
).
1.Определяю переменное напряжение, которое должно быть на вторичной обмотке сетевого трансформатора по формуле:
 (4.8.1)
(4.8.1)
где Uн – постоянное напряжение на нагрузке, В;
B – коэффициент, зависящий от тока нагрузки, который определяют по таблице 4.8.1:
Таблица 4.8.1
|
Коэффициент |
Ток нагрузки, А |
||||||
|
0,1 |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
1,2 |
|
|
B |
0,8 |
1 |
1,2 |
1,4 |
1,5 |
1,7 |
1,9 |
|
C |
2,4 |
2,2 |
2 |
1,9 |
1,8 |
1,8 |
1,7 |
 (4.8.2)
(4.8.2)
2. По току нагрузки определяю максимальный ток, текущий через каждый диод выпрямительного моста:
 (4.8.3)
(4.8.3)
где Iд – ток через диод, А;
С – коэффициент, зависящий от тока нагрузки (определяется по таблице 4.8.1).
IД=0,5*2*400=400 мА
3. Подсчитываю обратное напряжение, которое будет приложено к каждому диоду выпрямителя:
 (4.8.4)
(4.8.4)
где Uобр – обратное напряжение, В;
Uн напряжение на нагрузке, В.
Uобр=1,5*5=7.5 В
4. Выбираю диоды, у которых значение выпрямленного тока и допустимого обратного напряжения равны или превышают расчетное.
Выбранным выпрямителем будет диодный мост КЦ407А, так, как он удовлетворяет всем требованиям.
5. Определяю емкость конденсаторного фильтра:
 (4.8.5)
(4.8.5)
где
 -емкость
конденсаторного фильтра, мкФ;
-емкость
конденсаторного фильтра, мкФ;
 максимальный
ток нагрузки, А;
максимальный
ток нагрузки, А;
-напряжение
на нагрузке, В;
Сф=3200*0,304*10-3/5*10-3=787,602*10-6
 -коэффициент
пульсации выпрямленного напряжения и
нашем случае он равен
-коэффициент
пульсации выпрямленного напряжения и
нашем случае он равен
 .
.
и выбираю конденсатор: так, как нет предела в 757мкФ выбираю предел в 1000мкФ типа К50-18
Расчет трансформатора.
1.Определяю значение тока, текущего через вторичную обмотку трансформатора:
 (4.8.6)
(4.8.6)
где
 -ток
через обмотку II трансформатора, А;
-ток
через обмотку II трансформатора, А;
-максимальный
ток нагрузки, А.
 (4.8.7)
(4.8.7)
2.Определяю мощность, потребляемую выпрямителем от вторичной обмотки трансформатора:
 (4.8.8)
(4.8.8)
где
 -максимальная
мощность, потребляемая от вторичной
обмотки, Вт;
-максимальная
мощность, потребляемая от вторичной
обмотки, Вт;
 -напряжение
на вторичной обмотке, В;
-напряжение
на вторичной обмотке, В;
-максимальный
ток через вторичную обмотку трансформатора,
А.

3.Подсчитываю мощность трансформатора:
 (4.8.9)
(4.8.9)
где
 -мощность
трансформатора, Вт;
-мощность
трансформатора, Вт;
-максимальная
мощность, потребляемая от вторичной
обмотки трансформатора, Вт.
4.Определяю значение тока, текущего в первичной обмотке:
 (4.8.10)
(4.8.10)
где
 -ток
через обмотку I, А;
-ток
через обмотку I, А;
 -подсчитанная
мощность трансформатора, Вт;
-подсчитанная
мощность трансформатора, Вт;
 -напряжение
на первичной обмотке трансформатора
(сетевое напряжение).
-напряжение
на первичной обмотке трансформатора
(сетевое напряжение).
 .
.
5.Расчитываю необходимую площадь сечения сердечника магнитопровода:
 (4.8.11)
(4.8.11)
где S-сечение сердечника
магнитопровода,
 ;
;
-мощность
трансформатора, Вт.

6.Определяю число витков первичной (сетевой) обмотки:
 (4.8.12)
(4.8.12)
где
 -число
витков обмотки;
-число
витков обмотки;
-напряжение
на первичной обмотке, В;
S-сечение сердечника магнитопровода,
.

7.Подсчитываю число витков вторичной обмотки:
 (4.8.13)
(4.8.13)
где

 - число витков обмотки;
- число витков обмотки;
- напряжение на первичной обмотке,
В;
S – сечение сердечника
магнитопровода,
.

8.Определяю диаметр проводов обмотки трансформатора:
 (4.8.14)
(4.8.14)
где d – диаметр провода, мм;
I – ток через обмотку, мА.
 мм
мм
Выбор стабилизатора питания.
Исходя из произведённых расчётов потребляемой мощности, в качестве стабилизатора питания будем использовать интегральную микросхему КР142ЕН5А. На выходе данного стабилизатора обеспечивается напряжение 5В. На вход стабилизатора допускается подача напряжения до 20В.
4.9 Расчет быстродействия
Быстродействие характеризуется наибольшей частотой входных сигналов, при которой не нарушается функционирование схемы. На быстродействие влияет также длительность задержки сигнала, которая рассчитывается по формуле:
 (4.9.1)
(4.9.1)
где
 длительность
задержки сигнала
длительность
задержки сигнала
 задержка
сигнала при переключении с лог. “1” на
лог.”0”
задержка
сигнала при переключении с лог. “1” на
лог.”0”
 задержка
сигнала при переключении с лог. “0” на
лог.”1”
задержка
сигнала при переключении с лог. “0” на
лог.”1”
Быстродействие определяется по формуле:
 (4.9.2)
(4.9.2)
задержка
сигнала устройством
 задержка
сигнала каждым элементом
задержка
сигнала каждым элементом
Таблица 4.9.1 – время задержки сигнала отдельных элементов
|
Тип элемента |
|
|
Количество |
Общее
|
|
PIC18F452 |
25 |
50 |
1 |
50 |
|
MT16S2D |
50 |
50 |
1 |
50 |
|
DS1621 |
50 |
50 |
1 |
50 |
|
MAX232 |
50 |
50 |
1 |
50 |
|
TSOP1730 |
50 |
50 |
1 |
50 |
Быстродействие составляет
 250
нс
250
нс
быстродействие также характеризуется задержкой сигнала самой длинной цепи, которая определяется по формуле:
 ,(4.9.3)
,(4.9.3)
где
N – общее количество входов логических элементов, подключенных к линии,
L - длина линии связи от источника сигнала до приемника, для каждого определяется время задержки l=5(K-1), где К - число корпусов интегральных микросхем, включая микросхемы источников сигнала. длина линии связи от источника сигнала до приемника, для каждого определяется время задержки l=5(K-1), где К - число корпусов интегральных микросхем, включая микросхемы источников сигнала.
l=5(9-1)=40,
 5.34
нс
5.34
нс
общее быстродействие определяется по формуле:
 ,(4.9.4)
,(4.9.4)
в результате получаем общее быстродействие всего устройства:
 5.34+250=255.34
нс
5.34+250=255.34
нс
4.10 Расчёт надёжности
Расчет надежности производят на этапе разработки объекта для определения его соответствия требованиям. В результате расчета должны быть определены количественные характеристики надежности объектов. Расчет производится по известным данным об интенсивности отказов элементов, составляющих рассматриваемый объект; в частности, надежность какой-либо сборочной единицы ЭВМ определяется значениями интенсивности отказов ЭРЭ и элементов конструкции, составляющих сборочную единицу.
Интенсивность отказов показывает, какая часть элементов по отношению к общему количеству исправно работающих элементов в среднем выходит из строя в единицу времени.
Интенсивность отказов объекта есть сумма интенсивностей отказов всех входящих в объект элементов iэ:
о = iэ ,(4.10.1)
i=1
где о – интенсивность отказов объекта, 1/час;
iэ – интенсивность отказов элементов i-го типа и режима использования, 1/час;
k – количество разновидностей элементов по типам и режимам использования.
Интенсивность отказов э ЭРЭ в реальных условиях эксплуатации связана с величиной интенсивности отказов н ЭРЭ при номинальном электрическом режиме, коэффициентом нагрузки Кн, температурным коэффициентом Кт и количеством элементов N с интенсивностью отказов iэ соотношением:
э = нКнКтN ,(4.10.2)
где э – интенсивность отказов ЭРЭ в реальных условиях эксплуатации, 1/час;
н – интенсивность отказов ЭРЭ при номинальном электрическом режиме, 1/час;
Кн – коэффициент нагрузки – отношение количества используемых ножек микросхемы к общему числу ножек микросхем;
Кт – температурный коэффициент;
N – количество элементов с интенсивностью отказов н, шт.
Все данные, необходимые для расчета интенсивности отказов объекта, сводятся в таблицу 4.10.1, вычисление э будет вестись по формуле (4.10.2).
Таблица 4.10.1 – данные для расчёта интенсивности отказов
|
Наименование и тип элемента |
н10-6, 1/час |
Кн |
Кт |
N, шт |
э10-6, 1/час |
|
Микросхема TSOP1730 |
0,1 |
1 |
0,1 |
1 |
0,0075 |
|
Микросхема MT16S2D |
0,1 |
1 |
0,1 |
1 |
0,02 |
|
Микросхема PIC18F452 |
0,1 |
0,875 |
0,1 |
1 |
0,02 |
|
Микросхема MAX232 |
0,1 |
1 |
0,1 |
1 |
0,00875 |
|
Микросхема DS1621 |
0,1 |
1 |
0,1 |
1 |
0,0078 |
|
Пайка выводов микросхем |
0,0001 |
- |
- |
115 |
0,0115 |
|
Пайка выводов резисторов |
0,0001 |
- |
- |
68 |
0,0068 |
|
Пайка выводов конденсаторов |
0,0001 |
- |
- |
6 |
0,0006 |
|
Пайка выводов кварцевого резонатора |
0,0001 |
- |
- |
2 |
0,0002 |
Подставив значение э в формулу (6.3), определяется о:
о=0,0075+0,02+0,02+0,00875+0,0115+0,0068+0,0006+0,0002=0,0753510-6 1/час.
Средняя наработка на отказ, или среднее время безотказной работы, есть ожидаемая наработка объекта до первого отказа.
Средняя наработка на отказ То обратно пропорциональна интенсивности отказов объектов о:
То = 1/о , (4.10.3)
где То – средняя наработка на отказ, час;
о – интенсивность отказов объекта, 1/час.
Подставив значение о в формулу (4.10.3) определяется То:
То = 13,2714106 час.
Вероятность безотказной работы объекта Ро(t) – это вероятность того, что в пределах заданной наработки, т. е. заданного интервала времени, отказ объекта не возникнет.
Величина Ро(t) определяется выражением
Ро(t) = е–t , (4.10.4)
где Ро(t) – вероятность безотказной работы в течении t часов;
о – интенсивность отказов объекта, 1/час;
е – основание натурального логарифма.
По формуле (4.10.4) рассчитывается вероятность безотказной работы устройства в течение 1000 часов:
Ро(1000) = 0,9999447 99,99%.
Таким образом, существует 99,99% вероятности безотказной работы устройства в течение 1000 часов.
Произведя расчёты, пришли к выводу, что данная схема надёжная, достаточно быстродействующая, потребляет относительно малую мощность.
5. Разработка печатной платы
Печатные платы являются основными конструктивными единицами любой радиоэлектронной и электронно-вычислительной аппаратуры, так как печатный монтаж обеспечивает повторяемость параметров от образца к образцу дает возможность точно и просто идентифицировать установленные на плату элементы и обеспечивает высокую надежность изделий за счет использования стандартных хорошо отработанных технологических процессов их изготовления. Преимущество печатного монтажа заключается также в компактности аппаратуры и уменьшении ее массы.
Кроме того, технология печатного монтажа не зависит от функционального назначения аппаратуры, т.е. технология изготовления печатных плат для радиовещательной аппаратуры, телевизионных приемников, персональных ЭВМ одинакова. Поэтому возможны механизация и автоматизация как технологических процессов изготовления самих плат , так и процессов установки на них компонентов и сборки аппаратуры.
Печатные платы изготовляют из хромированных под высоким давлением слоистых пластиков, к которым с одной или двух сторон приклеивают медную фольгу. Такой пластик состоит из слоев волокнистого материала, склеенных между собой термореактивной смолой под давлением и при повышенной температуре. Материалом может быть диэлектрическая бумага, пропитанная фенольной смолой, или стеклоткань с непрерывными волокнами, склеенная компаундом на основе эпоксидной смолы. За рубежом такие материалы имеют фирменные названия, а в нашей стране первый материал получил название “фольгированный гетинакс”, а второй - “ фольгированный стеклотекстолит”.
Материалы на бумажной основе легче поддаются технической обработке, однако по сравнению со стеклотекстолитом они менее стойки к температурным перепадам и другим внешним воздействиям.
К печатным проводникам применимы те же способы выполнения монтажа, которые используются в обычных конструкциях. Однако если при монтаже изолированным проводом возможны пересечения проводников, то при печатном монтаже их размещают только в одной плоскости, а в результате этого невозможно их пересечение.
Чтобы в точках пересечения проводников возникали контакты, необходимо изменять пути прокладки проводников.
В некоторых случаях для избежания контакта при пересечениях применяют переходы на противоположную сторону с помощью металлизированных переходных отверстий.
При выборе формы проводников используют один из вариантов: либо применяют плавные линии печатных проводников, которые обеспечивают кротчайшие соединения элементов, либо вычерчивают рисунок печатных проводников в виде прямых линий и прямых углов. Этот метод характеризуется тем, что место каждой линии заранее определяется координатной сеткой, рисунок проводников получается простым.
Существует большое количество методов изготовления печатных плат, основными из которых являются:
1. Химический метод, который в зависимости от способа нанесения защитного рисунка делится на:
1.1. фотохимический способ;
1.2. сеточно-химический способ;
1.3. офсетно-химический способ;
2. Электрохимический метод:
2.1. фотоэлектрохимический способ;
2.2. сеточно-электрохимический способ;
2.3. офсетно-электрохимический способ;
3. Комбинированный метод:
3.1. комбинированный позитивный способ;
3.2. комбинированный негативный способ;
4. Метод переноса.
5. Метод вжигания серебра.
6. Метод копирования и т.д.
Для односторонних печатных плат применяются фотохимический или электрохимический метод. Для двусторонних печатных плат - комбинированный метод.
При стандартной технологии печатные платы изготовляют на фольгированном диэлектрике комбинированным позитивным или комбинированным негативным методом. Их называют комбинированными потому, что в обоих случаях вытравливания рисунка печатных проводников производится химическим способом, а наращивание меди на проводники и контактные площадки - электрохимическим.
Рассмотрим комбинированный позитивный метод. Последовательность основных операций изготовления печатных плат позитивным методом: заготовка из фольгированного стеклотекстолита или гетинакса покрывается слоем фоторезиста.
Фоторезист - это высокомолекулярное соединение, которое изменяет свои свойства под действием ультрафиолетового излучения.
С одной стороны, смещение спектральной чувствительности в коротковолновую область спектра - это хорошо, так как позволяет обходиться без темного помещения и работать при свете обычных ламп накаливания. C другой стороны, чувствительность к ультрафиолетовым лучам вызывает необходимость использования ртутных ламп в кварцевом баллоне, которые менее удобны в использовании, чем обычные.
Под действием излучения происходит фотополимеризация слоя, в результате которой пропадает растворимость в обычных растворителях, поэтому после проявления на освещенных участках поверхности образуется защитный рельеф, а на защищенных - слой фоторезиста остается без изменения и в дальнейшем вымывается. Из-за чувствительности соединений к свету и способности сопротивляться действию травителей их называют фоторезистами.
Экспонирование фоторезистов, нанесенных на поверхность фольгированного диэлектрика, производится через фотошаблон, в котором система прозрачных и непрозрачных участков образует требуемый рисунок проводников и контактных площадок. При последующем проявлении удаляется часть фоторезиста и образуется защитный рельеф с рисунком и размерами, определяемыми фотошаблоном. При этом методе защитный слой фоторезиста сохраняется на пробельных участках, а проводники и контактные площадки остаются открытыми. Поскольку фотошаблон при пробном процессе соответствует позитивному изображению печатной платы (темные проводники на светлом фоне), то и сам метод называют позитивным.
После проявления рисунка схемы плату покрывают слоем лака для защиты от механических повреждений и направляют на сверление отверстий. Эта операция нарушает непрерывность процесса, так как сушка и задубливание лака занимает несколько часов. Затем сверлят переходные и монтажные отверстия и производят их химическое меднение. Далее следует удаление защитного слоя и гальваническое осаждение меди на проводники, контактные площадки и в отверстия.
При электролитическом наращивании соединение с катодом осуществляются сплошным слоем медной фольги, покрывающим диэлектрик. Этот слой защищает также поверхность диэлектрика от воздействия электролита.
На следующем этапе поверх медного слоя гальваническим способом наносят защитное покрытие из сплава олово - свинец, после чего с пробельных мест удаляют защитный слой фоторезиста и стравливают фольгу.
Изготовление печатной платы завершается химической обработкой защитного покрытия для улучшения его способности к пайке.
Позитивный метод позволяет изготовить печатные платы с повышенной плотностью монтажа, например, с расстоянием между проводниками в узких местах 0,35 - 0,5 , с хорошими электрическими параметрами и высокой прочностью сцепления проводников с основанием.
При комбинированном негативном методе защитный слой фоторезист наносят на проводники и контактные площадки, поэтому фотошаблон имеет негативное изображение платы (прозрачные проводники на темном фоне). Порядок операций при этом измениться, но их количество и общий характер сохраняются.
После покрытия платы лаком для ее защиты от механических повреждений производят сверление отверстий и их химическую металлизацию.
Следующей операцией является гальваническое осаждение меди на проводники и отверстия. Для обеспечения электрического контакта с катодом создают дополнительные проводники и прошивают отверстия платы медным проводом.
В некоторых случаях применяют специальные рамки и другие приспособления, обеспечивающие электрический контакт со всеми участками, на которые медь должна наращиваться гальваническим способом. Последовательность технологических операций при негативном комбинированном методе изготовления почти такой же, как и при позитивном методе.
Основной недостаток негативного метода заключается в том, что щелочные и кислотные растворы, применяемые при металлизации отверстий, воздействуют на участки диэлектрика, не защищенные медной фольгой, что может привести к ухудшению электрических параметров готовой платы. В то же время негативный метод менее трудоемок, чем позитивный. Потому в тех случаях, когда к платам не предъявляют повышенных требований, применяют комбинированный негативный метод.
Общим недостатком обоих методов изготовления печатных плат является необходимость покрытия заготовок перед сверлением для защиты от механических повреждений печатных проводников. Сушка лака и его удаление после сверления и химического меднения отверстий увеличивают трудоемкость процесса и длительность технического цикла, нарушают его непрерывность. Поэтому нельзя создать автоматическую поточную линию производства печатных плат.
При ручном изготовлении указанный порядок следования операций должен сохраняться, так как слой фоторезиста и образованный им рисунок печатных проводников указывают на расположение отверстий. Следовательно, рисунок должен создаваться до сверления.
Операция сверления отверстий является процессом трудоемким, поскольку число отверстий, например, на платах среднего размера составляет несколько сотен, а на платах с ИМС в корпусах со штырьковыми выводами тысячи.
Таким образом, возникает проблема автоматизации сверления отверстий, решение которой можно достичь с использованием станков с числовым программным управлением (ЧПУ).
Изготовление ЧПУ для сверления отверстий в печатных платах упрощает весь процесс, делая его более приспособленным для дальнейшей автоматизации.
В соответствии со схемой электрической принципиальной разработана односторонняя печатная плата ОС с применением фольгированного стеклотекстолита с габаритными размерами 70мм×120мм.
При разводке были использованы печатные проводники шириной 0,8мм и 1,5мм (для силовой цепи управления).
Разводка платы производилась с использованием САПР P-CAD 2000 в ручном режиме.
Система автоматизированного проектирования радиоэлектронной аппаратуры P-CAD 2000 разработана фирмой "ACCEL Technologies, Inc." для ПЭВМ IBM PC / AT. Она работает под управлением операционных систем Windows 95 или Windows NT 4.0 и выше. Минимальный объем оперативной памяти для пользования системой должен быть не менее 16 Мбайт, рекомендуется 32 емкость памяти на жестком магнитном диске - не менее 50 Мбайт, необходим процессор Pentium 90. Возможности САПР P-CAD 2000 приведены в таблице 3.1.
САПР P-CAD 2000 позволяет выполнить следующие проектные операции:
— создание графических изображений компонентов принципиальной схемы и их физических образов;
— графический ввод чертежа принципиальной электрической схемы и чертежа печатной платы проектируемого устройства;
— одно и двухстороннее размещение элементов с планарными и многослойными контактными площадками на поле печатной платы с печатными и навесными (вырубными) шинами питания в интерактивном режиме и автоматическом режимах;
Таблица 5.1 – возможности САПР P-CAD 2000
|
Характеристики |
|
|
Максимальное количество компонентов на плате |
2300 |
|
Максимальное количество типов компонентов |
800 |
|
Максимальное количество связей |
4000 |
|
Максимальное количество контактов |
32767 |
|
Максимальные размеры печатной платы |
600х600 мм (60х60 дюймов) |
— ручную и автоматическую трассировку печатных проводников произвольной ширины в интерактивном режиме;
— размещение межслойных переходов;
— автоматизированный контроль результатов проектирования печатной платы на соответствие принципиальной электрической схеме и технологическим ограничениям;
— автоматическую коррекцию электрической принципиальной схемы по результатам размещения элементов на печатной плате (после эквивалентной перестановки компонентов и их выводов);
— выпуск конструкторской документации (чертеж принципиальной схемы, деталировочный и сборочный чертежи) и технологической информации на проектируемую печатную плату.
Разработанный печатный узел имеет одностороннюю установку радиоэлементов. Расстояние от стенки корпуса до лицевой стороны основной печатной платы равно 25мм. Ширина устройства равна 70мм. Таким образом, габаритные размеры ОС следующие: 120мм×70мм×35мм.
6. Базовое програмное обеспечение
6.1 Блок-схема алгоритма работы микроконтроллера
Основной особенностью данного устройства является, необходимость создания условий для одновременной работы трёх программ: основной (где производится индикация, программирование АЦП и модуля MSSP, переключение режимов работы ОС а также обмен данными с ПК) и прерывающих программ высокого и низкого приоритета (где производится опрос датчиков, ИК-приёмника, включение режима оповещение при помощи СИФУ).
Работа программы начинается с инициализации контроллера и переменных. В инициализацию контроллера входит:
настройка портов на вывод или ввод и отключение подтягивающих резисторов;
включение таймеров TMR0, TMR1, TMR2 и настройка их предделителей;
настройка контроллера прерываний;
включение периферийных модулей MSSP, USART, ADC и их настройка;
очистка регистров общего назначения.
Настройка портов ввода-вывода выполняется согласно таблице 6.1.1:
Таблица 6.1.1 – направление портов ввода-вывода
-
Порт и номер бита
Направление
PORTA,0
PORTA,1
PORTA,2
PORTA,3
PORTA,4
PORTA,5
ввод
ввод
ввод
ввод
вывод
вывод
PORTB,0
PORTB,1
PORTB,2
PORTB,3
PORTB,4
PORTB,5
PORTB,6
PORTB,7
ввод
ввод
ввод
ввод
ввод
ввод
ввод
ввод
PORTC,0
PORTC,1
PORTC,2
PORTC,3
PORTC,4
PORTC,5
PORTC,6
PORTC,7
вывод
вывод
вывод
ввод
ввод
вывод
ввод
ввод
PORTD,0
PORTD,1
PORTD,2
PORTD,3
PORTD,4
PORTD,5
PORTD,6
PORTD,7
вывод
вывод
вывод
вывод
вывод
вывод
вывод
вывод
PORTE,0
PORTE,1
PORTE,2
вывод
вывод
вывод
Перед каждым таймером должен быть включен предделитель. Предделители настраиваются согласно таблице 6.1.2. Для опроса ИК-пульта используется таймер TMR0. Он необходим для измерения периода между двумя соседними импульсами в передаваемом пакете данных.
Для опроса датчиков, вкл.\выкл. нагрузки и переключения ступени в СИФУ использован таймер TMR1.
Таймер TMR2 используется при управлении нагрузкой методом импульсно-фазового управления. Значение, записанное в регистр данного таймера, определяет промежуток времени от перехода фазы сетевого напряжения через нулевой порог до включения триака VS4.
Таблица 6.1.2 – значение предделителя для таймеров.
-
Таймер
Разрядность
Предделитель
Постделитель
Период
TMR0
8 бит
1:64
-
16 мс
TMR1
16 бит
1:1
-
65 мс
TMR2
8 бит
1:16
1:2
8 мс
Прерывающая программа состоит из прерываний высокого и низкого уровня. Прерывание INT0, которое возникает при переходе логического уровня с “0” в ”1” нулевого бита порта B, имеет высокий приоритет. Все остальные прерывания выполняются с низким приоритетом. Это необходимо для корректного опроса ИК-приёмника, подключенного к нулевому биту порта B.
ИК-пульт работает следующим образом. Выдается пакет, состоящий из 6 байт. Формат каждого передаваемого байта состоит из импульса сброса, стартового, 8 информационных и импульса чётности. Диаграмма передаваемого байта изображена на рисунке

Рисунок 6.1.1 – формат ИК-команд
Кодирование информации происходит следующим образом. Длительность паузы в 10 мс от импульса сброса R до стартового импульса S означает, что начата передача байта. Длительность паузы от стартового импульса до информационного (и между информационными) в 2 мс означает кодирование логического “0” а длительность в 4 мс – логической “1”. Таким же образом кодируется 9 бит чётности. Если длительность паузы не укладывается в данный диапазон, то считается что при передаче возникла ошибка, в результате чего данный пакет игнорируется. Пауза измеряется с помощью таймера TMR0. Если пауза была слишком большой, то TMR0 переполняется и начинает отсчет сначала, при этом выставляется влаг прерывания в регистре INTCON. Именно поэтому при измерении паузы необходимо проверять данный флаг прерывания. После того как весь пакет будет принят правильно, выставляется специальный флаг, который сообщает основной программе, что была принята команда с пульта. После проверки данного флага основная программа выполняет принятую команду. Формат передаваемого пакета изображён в таблице 6.1.3.
Таблица 6.1.3 – формат ИК протокола.
-
№ байта
Обозначение в программе
значение
1
ID_KEY
Идентификатор пульта
2
COMMAND
Передаваемая команда
3
PASS1
1 и 2 цифры пароля
4
PASS2
3 и 4 цифры пароля
5
PASS3
5 и 6 цифры пароля
6
PASS4
7 и 8 цифры пароля
После получения пакета в прерывании проверяется байт идентификатора. Если он равен 15, то принятый пакет принадлежит пульту от данной ОС и выставляется флаг, который сообщает основной программе о том что была принятя команда с ПДУ. Пульт передаёт 4 различных команды. Их код приведён в таблице 6.1.4.
Таблица 6.1.4 – коды команд ПДУ.
-
Код, hex
Значение
#A0
Вкл.\выкл. силовой канал №1
#B0
Вкл.\выкл. силовой канал №2
#C0
Вкл.\выкл. силовой канал №3
#EE
Переключить режим охранной системы
В подпрограмме прерывания по переполнению таймера TMR1 производится опрос подключенных датчиков. Если какой-либо датчик выдаст логическую “1” на вход то если его срабатывание разрешено байтами SENSOR_MODE и HL_STAT устанавливается флаг, проверяемый в цикле главной программы. Также в данном векторе прерывания производится увеличение ступеньки СИФУ на 25.
При возникновении прерывания таймера TMR2 производится подача импульса на триак VS4, длительность которой составляет 100 мкс. Этот импульс открывает данный триак, в результате чего нагрузка включается. Закроется триак лишь когда сетевое напряжение достигнет нулевого значения.
Значение ступени для импульсно-фазового управления заносится в таймер TMR2 при возникновении прерывания INT1. Данное прерывание происходит при переходе сетевого напряжения через нулевое значение.
Цикл основной программы состоит из следующих этапов:
чтение данных с термометра и АЦП;
Приём данных с ПК;
Передача данных на ПК;
Проверка наличия невыполненной команду ПДУ;
Анализ принятых данных и установка переменных в соответствии с ними;
Вывод данных на экран.
Цикл главной программы начинается с чтения данных цифрового термометра и АЦП, после чего производится приём данных. Если данные не поступают в течение 500 мс, значит соединение прервано, и весь цикл будёт начат заново. Формат принимаемых данных описан в таблице 6.1.6
После того как будут приняты все 10 байт, начинается передача 6 байт в ПК. Формат передаваемых данных приведен в таблице 6.1.5.
После того как обмен данными завершен, производится проверка наличия невыполненной команды с ПДУ. В том случае если таковая имеется, выполняется проверка правильности принятого пароля с паролем, считанным с ПК. В том случае если пароль верен, производится анализ принятой команды и ее выполнение.
Следующий этап главного цикла состоит в установке переменных в соответствии с данными, полученными с ПК. Здесь производится установка порогов срабатывания датчика и сравнение их с текущим значением. Если какой-либо датчик сработал, включается режим оповещения.
После обработки полученной информации, на экран выводится текущее состояние системы и температура. Затем весь цикл повторяется.
Таблица 6.1.5 – формат передаваемых данных в ПК.
|
№ |
Название |
Назначение |
|
1 |
Address |
Сетевой номер охранной системы |
|
2 |
SENS1_STAT |
0 – флаг дверного датчика 1 – флаг оконного датчика 2 – флаг лазерного датчика 3 – знак измеренной температуры объекта 4 – десятая часть градуса температуры 5 – была команда с ПДУ на вкл.\выкл. силового канала №1 6 – была команда с ПДУ на вкл.\выкл. силового канала №2 7 – была команда с ПДУ на вкл.\выкл. силового канала №3 |
|
3 |
SENS2_STAT |
0 – флаг доп. датчика №1 1 – флаг доп. датчика №2 2 – флаг доп. датчика №3 3 – флаг доп. датчика №4 4 – флаг доп. датчика №5 5 – флаг доп. датчика №6 6 –была команда с ПДУ 7 – была команда с ПДУ на переключение режима ОС |
|
4 |
AD |
Значение, полученное с аналогового датчика |
|
5 |
TERMAL |
Измеряемая температура объекта |
|
6 |
ADD_BYTE |
0 – флаг “пароль не верен” 1…7 – не используются |
Таблица 6.1.6 – Формат принимаемых данных с ПК.
|
№ |
Название |
Назначение |
|
1 |
Address |
Сетевой адрес охранной системы |
|
2 |
HL_STAT |
0 – флаг состояния силового канала №1 1 – флаг состояния силового канала №2 2 – флаг состояния силового канала №3 3 – вкл.\выкл. режим охраны 4 – отбой тревоги, очистка флагов 5 – режим оповещения (мерцание\включение) 6 – вкл.\выкл. дверной датчик 7 – команда ПДУ передана на ПК |
|
3 |
TERMAL_L |
Нижний порог срабатывания термометра |
|
4 |
TERMAL_H |
Верхний порог срабатывания термометра |
|
5 |
AD_VREF |
Порог срабатывания аналогового датчика |
|
6 |
SENSOR_MODE |
0 – вкл.\выкл. доп. датчик №1 1 – вкл.\выкл. доп. датчик №2 2 – вкл.\выкл. доп. датчик №3 3 – вкл.\выкл. доп. датчик №4 4 – вкл.\выкл. доп. датчик №5 5 – вкл.\выкл. доп. датчик № 6 6 – вкл.\выкл. оконный датчик 7 – вкл.\выкл. лазерный датчик |
|
7 |
DEF_PASS1 |
1 и 2 цифры устанавливаемого пароля |
|
8 |
DEF_PASS2 |
3 и 4 цифры устанавливаемого пароля |
|
9 |
DEF_PASS3 |
5 и 6 цифры устанавливаемого пароля |
|
10 |
DEF_PASS4 |
7 и 8 цифры устанавливаемого пароля |
6.2 Разработка программы поддержки
Для создания удобного интерфейса управления ОС необходимо написать программу на ПК. Эта программа должна обеспечить наглядное отображение состояния всех подключенных датчиков, а также дать возможность управления режимами ОС. Для создания данной программы будем использовать визуальную среду программирования Delphi 7.0. При работе с последовательным портом необходим дополнительный компонент под названием “Comport”, который доступен в Интернете на сайте http://www.torry.ru. Программа должна иметь удобное управление, а также голосовое озвучивание событий.
Создание главной формы.
Главная форма программы изображена на рисунке 6.2.1. В верхней части формы расположены клавиши управления ОС.
Подключить – данная кнопка служит для установления связи с устройством.
Параметры – вызывает форму с настройками системы, изображённую на рисунке 6.2.2.
Отбой – отключает режим оповещения, сбрасывает флаги сработавших датчиков.
Помощь – Вызывает форму с описанием программы.
Закрыть – завершает связь с ОС и закрывает программу.
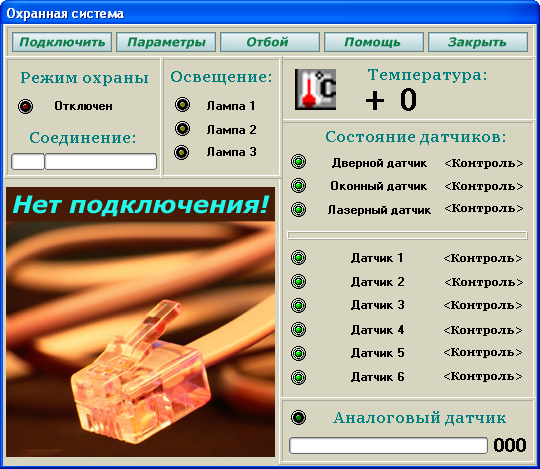
Рисунок 6.2.1 – основная форма программы
В правом верхнем углу главной формы отображается температура охраняемого объекта, ниже расположены кнопки вкл./выкл. датчиков, рябом с которыми отображается название датчика и его состояние. Если датчик включен, кнопка загорается зеленым цветом.
В верхнем левом углу отображается текущий режим ОС и расположена клавиша управления режимом. Когда ОС находится в режиме охраны, кнопка загорается красным светом.
В середине расположены кнопки для управления трёмя силовыми каналами. Если какой-либо канал включен, соответствующая кнопка загорается жёлтым цветом. В том случае, когда с ПДУ была команда на вкл./выкл. какого-либо канала, программа автоматически зажигает или гасит соответствующую кнопку.
Ниже расположена картинка, которая наглядно отображает текущее состояние (откл., вкл., тревога) ОС.
Меню настроек программы.
Здесь расположены все элементы управления программой.
ИК-ключ. Здесь вводится пароль, который сравнивается в паролем, выдаваемым с ПДУ. Если он совпадает, система воспринимает команды ПДУ. По умолчанию “12345678”.
Термометр\термостат. Здесь задаются верхний и нижний порог срабатывания цифрового термометра. По умолчанию соответственно “40” и ”10”.
Аналоговый датчик. Здесь задаётся пороговое значение, полученное с АЦП. Если считано значение выше заданного, выдаётся сигнал тревоги.
Тип сигнализации. Устанавливает режим оповещения: либо мерцание лампы на четвертом силовом канале, либо просто его включение. По умолчанию выбран пункт “свет”.
Период таймера. Необходим для точной настройки временных задержек программы под индивидуальный компьютер. По умолчанию 80 мс.
Справа расположены настройки звукового оповещения при различных событиях. Кроме этого, есть возможность переименования датчиков под конкретные условия применения ОС.
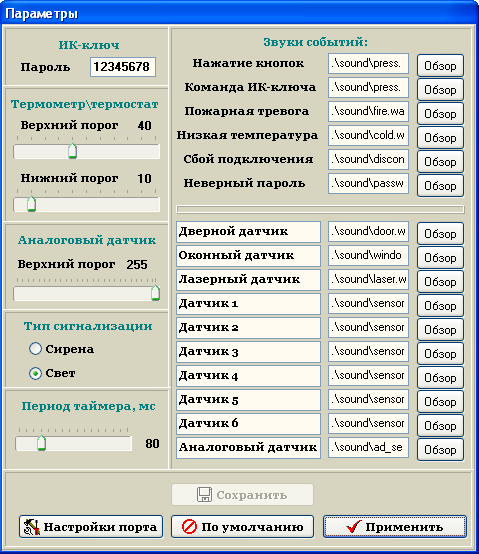
Рисунок 6.2.2 – окно настроек программы
При срабатывании одного из датчиков, превышения заданного значения температуры или разрыве связи раздаётся соответствующее звуковое сообщение и выводится окно предупреждения.
Рисунок 6.2.3 – окно предупреждения при разрыве связи.
6.3 Среда проектирования
Микроконтроллеры PICmicro обеспечены большим спектром аппаратных и программных инструментальных средств проектирования:
Интегрированная среда проектирования: Программное обеспечение MPLAB IDE.
Ассемблер/Компилятор/Линкер: Ассемблер MPASM; Компиляторы MLAB-C17 и MPLAB-C18; Линкер MPLINK/ Организатор библиотек MPLIB.
Симулятор:
Программный симулятор MLAB-SIM.
Эмуляторы:
Внутрисхемный эмулятор реального времени MPLAB-ICE; Внутрисхемный эмулятор PICMASTER/PICMASTER-CE; ICEPIC.
Внутрисхемный отладчик:
MLAB-ICD для микроконтроллеров семейства PIC16F87X.
Программаторы:
Универсальный программатор PRO MATE II; Недорогой программатор PICSTART для начала работы,
Недорогие демонстрационные платы:
SIMICE; PICDEMH;
PICDEM-2;
PICDEM-3;
PICDEM-17;
SEEVAL; KeeLoq.
Интегрированная среда проектирования MPLAB-IDE
Программное обеспечение MPLAB-IDE предназначено для разработки программного обеспечения 8-разрядных микроконтроллеров PICmicro, работающее под управлением операционной системы Windows. Основные характеристики MPLAB-IDE:
Многофункциональные возможности:
Редактор;
Симулятор;
Программатор (приобретается отдельно);
Эмулятор (приобретается отдельно). Полнофункциональный редактор. Организатор проекта.
Настройка панелей инструментов и параметров отображения. Строка состояния. Интерактивная помощь,
MPLAB-IDE позволяет:
Редактировать исходные файлы, написанные на языке ассемблера или С.
Быстро выполнять трансляцию и компиляцию проекта автоматически загружая параметры используемого микроконтроллера PICmicro.
Выполнять отладку программы с использованием: Исходных файлов; Листинга программы; Объектного кода.
Однотипная работа инструментальных модулей интегрированной среды проектирования MPLAB-IDE позволяет легко перейти от программного симулятора MPLAB-SJM к использованию полнофункционального эмулятора.
Ассемблер MPASM
MPASM - полнофункциональный универсальный макроассемблер для всех семейств микроконтроллеров PlCmicro, Ассемблер может генерировать шестнадцатиразрядный файл пригодный для записи в микроконтроллер или формировать перемещаемые объектные файлы для линкера MPLINK.
MPASM имеет интерфейс командной строки и оконный интерфейс, работает под управлением операционной системы Windows 3.X и выше, может работать как автономное приложение. MPASM генерирует объектные файлы, шестнадцатеричные HEX файлы в стандарте Intel, файл карты памяти (для детализации использования памяти микроконтроллера): файл листинга программы {текст программы совмещен с кодами микроконтроллера) и файл отладки для МРLAB-IDE.
Компиляторы MPLAB-C17 и MPLAB-C18
MPLAB-C17 и МР1_ЛВ-С18 - полнофункциональные ANSI 'С компиляторы с интегрированной средой обработки для микроконтроллеров семейств PIC17CXXX и PIC18CXXX соответственно. Для упрощения отладки текста программы компиляторы обеспечивают интеграцию в средства проектирования с передачей информации об используемых переменных в формате совместимом с MPLAB-IDE.
Линкер MPLINK/ Организатор библиотек MPLIB
MPLINK - линкер перемещаемых объектных файлов сгенерированных программами MPASM, MPLAB-C17 и MPLAB-C18. Линкер выполняет связь объектных файлов с предварительно компилированными файлами библиотек и файлами сценария.
MPLIB - организатор библиотек предварительно откомпилированных исходных файлов, которые нужно использовать с MPLNK. Когда подпрограмма библиотечного файла вызывается из исходного файла, в приложение будет включена только необходимый модуль. Это позволяет эффективно использовать большие библиотеки в различных приложениях, MPLIB управляет созданием и изменением библиотечных файлов.
Программный симулятор MPLAB-SIM
Симулятор MPLAB-SIM позволяет проследить выполнение программы микроконтроллеров PlCmicro на уровне команд по шагам или в режиме анимации. На любой команде выполнение программы может быть остановлено для проверки и изменения памяти. Функции стимула позволяют моделировать сигнал с логическими уровнями на входах микроконтроллера, MPLAB-SIM полностью поддерживает символьную отладку используя MPLAB-C17, MPLAB-C18 и MPASM. MPLAB-SJM является доступным и удобным средством отладки программ микроконтроллеров PlCmicro.
Внутрисхемный отладчик MPLAB-ICD
Внутрисхемный отладчик MPLAB-ICD является мощным недорогим инструментом отладки программы. Работа MPLAB-ICD основана на функции внутрисхемной отладки Flash микроконтроллеров семейства PIC16F87X, Эта особенность, совместно с функцией внутрисхемного последовательного программирования, позволяет запрограммировать микроконтроллер непосредственно из среды проектирования MPLAB IDE. MPLAB-ICD позволяет быстро выполнить отладку программы выполняя ее по шагам, в режиме анимации или в режиме реального времени.
7. Экономическая часть
Полная себестоимость промышленной продукции — это выраженные в денежной форме текущие затраты предприятия на ее производство и реализацию. Себестоимость продукции имеет большое значение для экономики предприятия, так как размер получаемой им прибыли в значительной мере зависит от уровня себестоимости. Как известно, прибыль есть разница между выручкой от реализации продукции и ее полной себестоимостью. Следовательно, если себестоимость ниже, то прибыль выше, и наоборот. Предприятиям необходимо добиваться повышения рентабельности, ликвидации убыточности производства, увеличения прибыли не за счет повышения цен на свою продукцию, а за счет снижения себестоимости и улучшения ее качества, так как само по себе повышение цен на продукцию никакой реальной выгоды обществу не несет.
Анализ себестоимости продукции имеет исключительно важное значение. Он позволяет выяснить тенденции изменения данного показателя, выполнения плана по его уровню, определить влияние факторов на его прирост или снижение и на этой основе дать оценку работы предприятия и определить возможности и резервы снижения себестоимости продукции.
Основными задачами анализа себестоимости продукции являются: изучение и оценка уровня себестоимости продукции: выявление факторов, оказывающих влияние на уровень себестоимости и определение их размеров: разработка мероприятий по дальнейшему снижению себестоимости продукции.
Источниками анализа себестоимости продукции будут служить: ф . №5-3 "Отчет о затратах на производство и реализацию продукции (работ, услуг) предприятия (организации)", плановые и отчетные калькуляции себестоимости продукции, данные синтетического и аналитического учета затрат и другие.
Структура и состав себестоимости продукции.
Планирование и учет себестоимости продукции на предприятиях ведут по элементам затрат и по калькуляционным статьям расходов. Элементы затрат: материальные затраты (сырье и материалы, покупные комплектующие изделия и полуфабрикаты, топливо, электроэнергия и т.д.), затраты на оплату труда и отчисления на социальные нужды, амортизация основных средств, прочие затраты (износ нематериальных активов, арендная плата, обязательные страховые платежи, проценты, отчисления во внебюджетные фонды и другие).
Группировка затрат по элементам необходима для того, чтобы изучить материалоемкость, энергоемкость, трудоемкость, фондоемкость продукции установить влияние технического прогресса на структуру затрат. Если доля заработной платы уменьшается, а доля амортизации увеличивается, то это свидетельствует о повышении технического уровня предприятия, о росте производительности труда. Удельный вес зарплаты сокращается и в том случае, если увеличивается доля покупных комплектующих изделий , полуфабрикатов, что свидетельствует о повышении уровня кооперации и специализации предприятия.
Группировка затрат по статьям калькуляции (по назначению) указывает, куда, на какие цели и в каких размерах израсходованы ресурсы. Она необходима для исчисления себестоимости отдельных видов изделий в многономенклатурном производстве, установления центра сосредоточения затрат и поиска резервов их сокращения. Основные статьи калькуляции: сырье и материалы, возвратные отходы(вычитаются), покупные изделия и полуфабрикаты, топливо и энергия на технологические цели, основная и дополнительная зарплата производственных рабочих, отчисления на социальное и медицинское страхование производственных рабочих, расходы на содержание и эксплуатацию машин и оборудования, общепроизводственные расходы, общехозяйственные расходы, потери от брака, прочие производственные расходы, коммерческие расходы.
В зависимости от объема производства все затраты предприятия можно разделить на постоянные и переменные, что имеет немаловажное значение при анализе себестоимости продукции.
Постоянные расходы (амортизация, аренда помещений, налог на имущество, повременная оплата труда рабочих, зарплата и страхование административно-хозяйственного аппарата) остаются стабильными и при изменении объема производства.
Переменные расходы (сдельная зарплата производственных рабочих, сырье, материалы, технологическое топливо, электроэнергия) изменяются пропорционально объему производства продукции.
7.1 Расчёт себестоимости
В данном разделе дипломного проекта приводится расчет себестоимости охранной системы с дистанционным управлением. В основе метода расчета себестоимости лежит использование системы технико-экономических норм и нормативов всех видов текущих затрат. Исходными данными для проведения этого расчета являются: спецификация основных сборочных единиц входящих в изделие; спецификация основных материалов, покупных изделий и полуфабрикатов; нормативы их расхода на единицу изделия; сводные нормы трудоемкости по видам работ и средние разряды работ на проводимые работы; часовые тарифные ставки по разрядам работ.
Расчет производится на основе суммарной стоимости приобретения основных материалов и покупных комплектующих изделий
 ,
(7.2.1)
,
(7.2.1)
где: SОП — стоимость основных и покупных комплектующих, руб.;
1,15 — коэффициент, учитывающий транспортно-заготовительные расходы;
SO — стоимость основных материалов, руб.;
SП — стоимость покупных комплектующих изделий, руб.
Ведомость расхода основных материалов приведена в таблице 7.1, а покупных изделий в таблице 7.2.
Таблица 7.1 – Ведомость расхода основных материалов
|
Наименование материала |
Ед. изм. |
Цена за ед., руб. |
Норма расхода на 1 изделие |
Стоимость, руб. |
|
Припой ПОС-61 |
кг |
95 |
0,1 |
9,5 |
|
Канифоль |
кг |
23 |
0,05 |
1,15 |
|
Лак Э-4100 |
кг |
56 |
0,05 |
2,8 |
|
Стеклотекстолит СФ-2-35-1,5 |
кг |
82 |
0,1 |
8,2 |
|
Хлорное железо |
кг |
145 |
0,15 |
21,75 |
|
Фоторезист |
кг |
123 |
0,02 |
2,46 |
|
Итого |
45,86 |
Таблица 7.2 – Ведомость расхода покупных изделий
|
Наименование изделия |
Норма расхода на 1 изделие |
Цена за ед., руб. |
Стоимость, руб. |
|
Конденсаторы: |
|
||
|
К50-35-25В-1000мкФ-20% |
1 |
3,5 |
3,5 |
|
К50-6-50В-1мкФ-5% |
1 |
2,1 |
2,1 |
|
КД2-500В-22пФ-5% |
2 |
1 |
2 |
|
К10-7В-0.068 мкФ-Н90 |
1 |
1 |
1 |
|
Микросхемы: |
|||
|
PIC18F452 |
1 |
240 |
240 |
|
PIC16F630 |
1 |
56 |
56 |
|
DS1621 |
1 |
105 |
105 |
|
MAX232-CPE |
1 |
30 |
30 |
|
TSOP1730 |
1 |
20 |
20 |
|
LM7806 |
1 |
12 |
12 |
|
Индикатор: |
|||
|
MT16S2D |
1 |
220 |
220 |
|
Резисторы: |
|||
|
С2-33-0.125-10 кОм-5% |
19 |
0,5 |
9,5 |
|
С2-33-0.125-1 кОм-5% |
4 |
0,5 |
2 |
|
С2-33-0.125-24 кОм-5% |
1 |
0,5 |
0,5 |
|
С2-33-0.125-270 Ом-5% |
6 |
0,5 |
3 |
|
С2-33-0.125-100 кОм-5% |
2 |
0,5 |
1 |
|
С2-33-0.125-100 Ом-5% |
1 |
0,5 |
0,5 |
|
Кнопка тактовая: |
|||
|
TS-A3PS-130 |
5 |
1,5 |
7,5 |
|
Диоды: |
|||
|
RS407L |
1 |
12 |
12 |
|
1N4001 |
1 |
1 |
1 |
|
Светодиод АЛ307КМ |
1 |
1 |
1 |
|
ИК-диод HSDL-4220 |
1 |
5 |
5 |
|
Разъём: |
|||
|
DB-25M (розетка) |
1 |
6 |
6 |
|
DB-25F (вилка) |
1 |
6 |
6 |
|
DB-9F (розетка) |
1 |
8 |
8 |
|
Кварцевый резонатор: |
|||
|
HC-49U |
1 |
5 |
5 |
|
Оптроны: |
|||
|
4N25 |
2 |
6 |
12 |
|
MOC3021 |
4 |
8 |
32 |
|
Триаки: |
|||
|
BT-136 |
4 |
10 |
40 |
|
Итого: |
- |
- |
843,6 |
Т.о. стоимость основных материалов и покупных комплектующих изделий по формуле (8.1) составит:
S=1,15*45,86+1,15*843,6= 1022,88 руб.
7.2 Расчет заработной платы и статей калькуляции
Заработная плата является денежным выражением части совокупного общественного продукта, поступающей в индивидуальное потребление работников в соответствии с количеством и качеством их труда. Под количеством труда понимается объем выработанной продукции или отработанного времени, качество труда определяется квалификацией работника, сложностью и характером работы, которую он выполняет.
Тарифная ставка определяет размер оплаты труда рабочего каждого разряда за единицу времени. При определении уровня тарифных ставок для отрасли учитываются тяжесть, вредность, интенсивность труда. Эти данные приведены в таблице 7.3.
Размер основной заработной платы
 (7.3.1.1)
(7.3.1.1)
где ЗОСН — основная заработная плата, руб.;
1,15 — коэффициент, учитывающий премии;
tштi — норма штучного времени на операцию, ч;
Сш — часовая тарифная ставка, соответствующая разряду работ, руб.;
Дополнительная заработная плата составляет 10% от основной
 (7.3.1.2)
(7.3.1.2)
Последовательность работ по изготовлению охранной системы, нормы времени на каждый этап приведены в таблице 7.3.
Таблица 7.3 – расчёт заработной платы
|
№ |
Наименование операции |
Специальность, профессия |
Разряд работы |
Часовая тарифная ставка, руб. |
Норма времени, мин. |
Основная заработная плата, руб. |
Дополнительная заработная плата, руб. |
|
1 |
Механическая обработка заготовки |
Рабочий-станочник |
4 |
15 |
18 |
5,18 |
0,52 |
|
2 |
Предварительное меднение |
Рабочий-гальваник |
2 |
10 |
20 |
3,45 |
0,35 |
|
3 |
Получение рисунка платы |
Рабочий-станочник |
4 |
15 |
25 |
7,25 |
0,73 |
|
4 |
Гальваническое осаждение |
Рабочий-гальваник |
2 |
10 |
22 |
4,26 |
0,43 |
|
5 |
Травление |
Рабочий-гальваник |
2 |
10 |
8 |
1,5 |
0,15 |
|
6 |
Проверка, обрезка |
Рабочий-гальваник |
2 |
10 |
10 |
1,96 |
0,2 |
|
7 |
Сборка платы, установка элементов |
Слесарь-сборщик |
4 |
15 |
200 |
56,93 |
5,7 |
|
8 |
Монтаж платы |
Слесарь-сборщик |
4 |
15 |
15 |
4,31 |
0,43 |
|
Итого: |
84,84 |
8,48 |
Отчисления на социальное страхование составляют 26% от суммы основной и дополнительной зарплаты
Зс.с.=0,26*(84,84+8,48)=24,26 руб.
Общецеховые расходы определяются в размере 250% от основной заработной платы. В нее входит содержание персонала, амортизация зданий, сооружений и инвентаря, испытания, опыты, исследования, рационализация и изобретательство, охрана труда и прочие расходы.
Зо.ц.=2,5*84,84= 212,1 руб.
Общепроизводственные расходы определяются в размере 500% от основной заработной платы. В нее входят расходы на содержание и эксплуатацию оборудования, и затраты на электроэнергию, топливо, воду и т.п.
Зц=5*84,84= 424,2 руб.
Общезаводские расходы включают в себя расходы общественные и общехозяйственные, определяются в размере 250% от основной заработной платы
Зоз=2,5*84,84=212,1 руб.
Заводская себестоимость включает в себя стоимость основных и покупных материалов и изделий, основную и дополнительную заработную плату, отчисления на социальное страхование, общецеховые расходы, общепроизводственные и общезаводские расходы:
Сз= 52,74+970,14+84,84+8,48+24,26+212,1+424,2+212,1=1988,86 руб.
Внепроизводственные расходы рассчитываются в размере 5% от заводской себестоимости
Свп= 0,05*1988,86=99,44 руб.
Полная себестоимость рассчитывается как сумма заводской себестоимости и внепроизводственных расходов
Сп= 1988,86+99,44=2088,3 руб.
Плановая прибыль определяется в размере 25% от полной себестоимости
Пп=0,25*2088,3=522,1 руб.
НДС рассчитывается в размере 18% от суммы полной себестоимости и прибыли с вычетом стоимости основных материалов:
НДС=0,18*(2088,3+522,1-1022,88)=285,75 руб.
Отпускная цена определяется как сумма полной себестоимости, плановой прибыли и НДС
Ц=2088,3+522,1+285,75=2896,15 руб.
В данном разделе дипломного проекта был произведен экономический расчёт себестоимости охранной системы с дистанционным управлением. Результаты расчёта отражены в таблице 7.5.
Таблица 7.5-Калькуляция себестоимости охранной системы
|
Статьи калькуляции |
Размер затрат, руб. |
|
1. Стоимость основных материалов |
52,74 |
|
2. Стоимость покупных изделий |
970,14 |
|
3. Основная заработная плата |
84,84 |
|
4. Дополнительная заработная плата |
8,48 |
|
5. Отчисления на социальное страхование |
24,26 |
|
6. Общецеховые расходы |
212,1 |
|
7. Общепроизводственные расходы |
424,2 |
|
8. Общезаводские расходы |
212,1 |
|
9. Заводская себестоимость |
1988,86 |
|
10. Внепроизводственные расходы |
99,44 |
|
11. Полная себестоимость |
2088,3 |
|
12. Плановая прибыль |
522,1 |
|
13. НДС |
285,75 |
|
14. Отпускная цена |
2896,15 |
Прошло почти 15 лет, после того как отечественное производство начало адаптироваться к условиям рыночной экономики. Было сокращено немало предприятий, продукция которых не была востребована. Опыт показал, что остались “на плаву” те предприятия, которые начали внедрение новых технологий, системы менеджмента качества. Однако для успешного существования производства этого недостаточно. Уровень жизни в России в целом несколько ниже чем в развитых странах Европы. Поэтому отечественный потребитель стремиться покупать продукцию по более низким ценам. Исходя из этого можно сделать вывод: в условиях российского рынка необходимо стремиться снизить цену продукции, поскольку чем ниже будет цена, тем выше будет спрос. Однако для снижения цены необходимо стремиться снижать издержки и расходы на покупку комплектующих изделий.
На сегодняшний день, благодаря бурному росту электронной промышленности в развитых странах, стоимость ряда электронных компонентов заметно снизилась по сравнению с отечественной элементной базой. Именно поэтому было решено спроектировать охранную систему именно на зарубежной элементной базе, поскольку в итоге это позволит снизить стоимость изделия в целом. Кроме того, в случае ремонта , компоненты не будут являться дефицитом.
Расчёт показал, что охранная система с дистанционным управлением имеет гораздо более низкую стоимость чем у аналогов (как отечественных так и зарубежных). Сравнительная характеристика различных ОС приведена в таблице 7.6. Согласно данным, приведенным в таблице, можно сделать вывод: охранная система с дистанционным управлением даже превосходит некоторые аналоги, несмотря на то, что ее стоимость гораздо ниже.
Таблица 7.6 – Сравнительная характеристика различных охранных систем.
|
Название |
Количество датчиков |
Связь с ПК |
ПДУ |
Резервное питание |
Объединение в сеть |
Стоимость |
|
Данная ОС |
9 |
Есть |
Есть |
Опция |
Да |
2910 |
|
ОС “Сигнал” |
2 |
Нет |
Нет |
Есть |
Нет |
1450 |
|
ОС “Страж” |
4 |
Нет |
Нет |
Есть |
Нет |
4900 |
|
ОС “Легион” |
10 |
Есть |
Нет |
Есть |
Да |
7560 |
|
“Гольфстрим” |
до 50 |
Есть |
Есть |
Есть |
Нет |
от 15000 |
8. Охрана труда и техника безопасности
Изготовление устройства разбито на множество технологических процессов, на каждом из которых присутствуют различные опасные и вредные производственные факторы (ОВПФ). Поэтому следует рассматривать ОВПФ на каждом технологическом процессе.
8.1 Анализ опасных и вредных факторов при изготовлении устройства
Рассмотрим следующие необходимые для изготовления устройства технологические процессы:
1) подготовка фотошаблонов печатной платы и программы сверления для станков с ЧПУ на компьютере;
изготовление печатной платы;
установка компонентов на печатную плату;
сборка устройства.
8.2 Подготовка программ
В данном технологическом процессе идет создание управляющих программ для сверлильного станка, фотоплоттера. Подготовка программ проводится на персональных компьютерах. Вследствие воздействия электронного пучка на слой люминофора поверхность экрана приобретает электростатический заряд. Сильное электростатическое поле вредно для человеческого организма. При эксплуатации монитор компьютера излучает мягкое рентгеновское излучение. Опасность этого вида излучения связана с его способностью проникать в тело человека на глубину 1-2 см и поражать поверхностный кожный покров.
Так же опасными и вредными производственными факторами при использовании компьютеров и ВДТ являются: ионизирующее излучение, электростатические поля, высокий уровень шума.
Нормирующим документом для ВДТ является СанПин 2.2.2.0.-94 предъявляющий следующие требования к мониторам.
Конструкция ВДТ и ПЭВМ должна обеспечивать:
-уровень ультрафиолетового, излучения на рабочем месте пользователя в длинноволновой области (400-315 нм) должен быть не более 10 Вт/м 2; средневолновой области (315-7. 280 нм) - не более 0,01 Вт/м 2; и отсутствовать в коротковолновой области (280-200 нм);
-напряженность электромагнитного поля на рабочем месте пользователя по электрической составляющей должна быть не более 50 В/м и по магнитной составляющей не более 5 А/м;
-напряженность электростатических полей на поверхностях ВДТ не более 20 кВ/м;
-уровень звука при работе ВДТ и ПЭВМ при включении их в сеть не должен превышать 45 дБ.
8.3 Изготовление печатной платы
Резка происходит на станках, которые требуют ручной подачи заготовки. При ручной обработке в основном могут возникнуть механические травмы (ушибы, порезы, уколы и т.д.). При работе на станках наиболее опасными производственными факторами являются механические травмы, захват одежды движущимися частями станка. К вредным факторам относятся: выделение мелкой пыли, шум и вибрации.
Сверление и фрезерование заготовок производится на сверлильно-фрезерных станках с числовым программным управлением.
На этом этапе существенным вредным фактором является производственный шум, создаваемый работающими станками. В зависимости от уровня и спектра шума воздействие его на организм различно. Шум с уровнем 80 дБ затрудняет разборчивость речи, вызывает снижение работоспособности и мешает нормальному отдыху. Шум с уровнем 100-120 дБ на низких частотах и 80-90 дБ на средних и высоких частотах вызывает необратимые изменения и может привести к понижению слуха. Вредное воздействие шума распространяется также и на другие органы человека через нервную систему (головная боль, бессонница, ухудшение памяти).
При работе со станками существует ещё и опасность поражения электрическим током. Проходя через организм человека, электрический ток производит механическое, термическое, электролитическое и биологическое действие
8.4 Механическое действие электрического тока проявляется в разрывах мышечных и других тканей
Термическое действие проявляется в ожогах отдельных участков тела, нагрева до высокой температуры кровеносных сосудов, нервов, сердца, мозга и других органов, что вызывает в них серьёзные функциональные расстройства. Электролитическое действие тока выражается в разложении органической жидкости, в том числе и крови, что вызывает значительные нарушения их физико-химического состава.
Биологическое действие тока проявляется в возбуждении тканей и непроизвольном судорожном сокращении мышц.
Тяжесть поражения электрическим током зависит от ряда факторов, важнейший из которых – сила тока, протекающего через тело человека, продолжительность его действия, пути прохождения тока через тело, индивидуальные особенности человека и т.д.
При работе с приборами возможны следующие пути прохождения тока через организм: рука-рука и рука-ноги. В этом случае очевидно, что ток протекает через сердце и лёгкие, что является очень опасным фактором. Ток силой даже в 100 мА может привести к фатальным последствиям.
Меднение. Для химического меднения применяют вредные вещества: серную, соляную и азотную кислоты, хлорную медь, гидроокись натрия, трихлорэтилен и др. Эти вещества токсичны.
При гальваническом покрытии происходит выделение водорода, который захватывает частицы электролита, загрязняя воздух. При лужении используется электролит, в состав которого входит станнит натрия (Na2SNO3·3H3O), уксусный и едкий натрий. Наиболее токсичны выделяющиеся пары щёлочи. Для приготовления электролитов используют цианистые соли калия, цинка, кадмия меди и т.д. Отравление возможно как пылью этих солей, так и цианистым водородом, выделяющимся в процессе покрытия.
Для травления плат используется ряд растворов: хлорное железо, персульфат аммония, хлорная медь и другие, которые являются токсичными веществами. Они, имея в своём составе аммиак, серную и соляную кислоты, оказывают в основном раздражающее действие на поверхностные ткани дыхательного тракта и слизистые оболочки, а также кожу. Кислоты могут вызывать химические ожоги.
Лужение платы происходит в расплавленном припое. Наиболее часто применяют оловянно-свинцовые припои: ПОС-61, ПОС-40, ПОС-60. В состав припоев входит свинец и олово. Свинец вызывает нарушение обменных процессов в организме, поражение нервной системы, малокровие, нарушение энергетического баланса клетки. Пыль, окись олова вызывают заболевание лёгких, хронический бронхит. В процессе пайки и лужения платы происходит загрязнение воздушной среды, рабочих поверхностей одежды и кожи рук работающих со свинцом и оловом. Приведу предельно допустимые концентрации в воздухе рабочей зоны для некоторых исходных компонентов, входящих в состав припоя (мг/м ): алюминий – 2, кадмий – 0.1, марганец – 0.3, медь – 1, никель – 0.5, олово – 10, свинец - 0.01, сурьма – 0.5, титан – 10, цинк – 0.5.
Монтаж электрических схем приборов и радиоаппаратуры ведётся при помощи различных видов пайки. Каждой разновидности пайки присущи определённые опасные и вредные физические факторы, отличающиеся как количественными, так и качественными характеристиками. При этом некоторые виды пайки продуцируют одновременно несколько таких физических факторов, приводящих к травмированию, ухудшению условий труда и возникновению пожаров и взрывов. Такими потенциальными опасностями могут быть: запылённость и загазованность воздуха рабочей зоны; наличие инфракрасных излучений от расплавленного припоя в ванне или от паяльника; наличие электромагнитного излучения высокой частоты; действие ультразвука на организм монтажника при пайке волной, которая образуется за счёт действия ультразвука на расплавленный припой; воздействие электростатического заряда; неудовлетворительная освещённость рабочих зон или повышенная яркость; неудовлетворительные метеорологические условия в рабочей зоне; воздействие брызг и капель расплавленного припоя; поражение электрическим током.
Правильное освещение рабочих участков при выполнении всех видов работ является одним из важных факторов предупреждения травматизма и профессиональных заболеваний. При плохом освещении возрастает опасность ошибочных действий и несчастных случаев. Плохое освещение может привести к профессиональным заболеваниям: рабочая миопия (близорукость) и др. У лиц, полностью или частично лишённых естественного света (по роду работы или в силу географических условий) может возникнуть световое голодание.
Таким образом, основными опасными и вредными производственными факторами являются: запылённость воздуха, загрязнение воздуха токсичными веществами, травмы при механической обработке материалов, шум, вибрация, пожароопасность, поражение электрическим током.
Мероприятия, обеспечивающие безопасные условия труда при изготовлении устройства
Для обеспечения безопасности на рабочих местах проводятся организационные и технические мероприятия, необходимые для предотвращения несчастных случаев на производстве. Проведение и соблюдение таких мероприятий обязательно как для работодателей, так и для самих рабочих.
8.5 Организационные мероприятия
Повышение знаний охраны труда у работающих на предприятии достигается систематическим проведением пропаганды этих вопросов. Персонал, допускаемый к участию в производственном процессе должен пройти инструктаж и обучение условиям охраны труда по ГОСТ 12.0.004-79 .
Вводный инструктаж проводится с целью ознакомления с общими правилами по технике безопасности (ТБ) и промсанитарии, основными законами об охране труда и правилами внутреннего трудового распорядка. Данный инструктаж проводится в кабинете по ТБ по конспекту, утверждённому главным инженером предприятия, и оформляется в специальном журнале.
Инструктаж на рабочем месте проводится с целью ознакомления с действующими инструкциями по охране труда для данной профессии, специальности или поручаемой работы руководителем участка по “Памятке для проведения инструктажа на рабочем месте”. Проведённый инструктаж оформляется в журнале.
По своему назначению инструктаж на рабочем месте подразделяется на первичный, периодический (повторный) и внеплановый.
Первичный инструктаж проводится персонально с каждым поступившим на работу в течение нескольких смен и сопровождается показом безопасных приёмов работы. Всем поступившим на работу при получении первичного инструктажа выдаются инструкции по охране труда по профессии, специальности или виду выполняемой работы.
Периодический (повторный) инструктаж проводится со всеми работающими независимо от квалификации и стажа работы по данной профессии один раз в квартал. Периодический инструктаж может быть групповым или индивидуальным в форме беседы с разбором нарушений правил безопасности, производственных травм и профзаболеваний из практики участка, цеха, предприятия или других предприятий.
Внеплановый инструктаж проводится в случаях изменения технологического процесса, оборудования, приспособлений, сырья и т.п., введения новых инструкций по охране труда, либо если в цехе имелись случаи травматизма.
8.6 Технические мероприятия
Производственные помещения, в которых осуществляются процессы обработки резанием и сверлением, должны соответствовать требованиям СНиП 11-2-80, СНиП 11-89-90 и санитарным нормам проектирования промышленных предприятий СНиП 245-71. Бытовые помещения должны соответствовать требованиям СНиП 11-92-76. Все помещения должны быть оборудованы средствами пожаротушения по ГОСТ 12.4.009-83. Электроинструменты должны соответствовать требованиям ГОСТ 12.2.013-87 «ССБТ. Машины ручные электрические. Общие требования безопасности и методы измерений.»
Методы борьбы с шумами. В соответствии с ГОСТ 12.1.003-83 защита от шума должна достигаться разработкой шумобезопасной техники, применением средств и методов коллективной защиты ГОСТ 12.1.0029-80 и индивидуальной защиты по ГОСТ 12.4.051-78, а также строительно-акустическими методами в соответствии с СНиП II-12-77 «Строительные нормы и правила. Нормы проектирования. Защита от шума.»
Коллективная защита состоит в снижении шума в источнике его возникновения и на пути его распространения, акустические средства защиты – средства звукоизоляции, звукопоглощения, демпфирования и глушители шума.
Строительно-акустические мероприятия заключаются в выборе и установке малошумящего оборудования, устройств кожухов, глушителей экранов рациональная планировка территории предприятия, устройства виброизоляционных материалов и ароматизаторов под оборудование, глушение шума вентиляционных установок, применение виброизолирующих покрытий.
Индивидуальные средства: специальные наушники, вкладыши в ушную раковину, противошумовые каски.
Для травления плат используют растворители, которые являются токсичными веществами. Работу с растворителями следует проводить в спецодежде (халат, полиэтиленовый фартук, резиновые перчатки). Рабочие места должны быть оборудованы вытяжной вентиляцией.
Требования к производственным помещениям. При проектировании и строительстве производственных зданий и сооружений необходимо учитывать категорию пожарной опасности производства. Основные требования правил безопасности к системам отопления предусмотрены в СНиП II-33-75.
Гальванические цехи и участки располагают на первых этажах многоэтажных зданий или в одноэтажных зданиях высотой не менее 5 м. Полы и стены выполняются из керамических плиток.
Электролизные ванны выполняют изолированными от земли, а сборные баки для отработанного электролита заземляют. Электроаппаратуру и электродвигатели применяют во влагонепроницаемом исполнении.
Все технологические помещения должны оборудоваться вентиляцией.
Таблица 8.1 – Рекомендации по устройству вентиляции в отдельных гальванических участках
|
Отделение |
Вентиляция |
|
|
Вытяжная |
Приточная |
|
|
Гальваническое, травильное и приготовления растворов |
механическая через местные отсосы |
механическая, в верхнюю зону помещения |
|
Машинное |
общеобменная, механическая или естественная |
механическая в холодный или переходной периоды года и естественная в тёплый период |
|
Склад хранения химикатов и развеска цианистых солей |
механическая, местная от шкафов и общеобменная из нижней зоны помещения из расчёта обеспечения кратности воздухообмена 31/ч |
механическая, в верхнюю зону помещения |
В гальваническом и травильном отделениях применяют местные отсосы с горизонтальной щелью всасывания (“опрокинутые”): без передувки – двубортовые, с передувкой – одно- и двубортовые. Столы для обезжиривания деталей оборудуют наклонными панелями равномерного всасывания с нижним или верхним присоединением к воздуховоду.
Воздуховоды выполняют из материалов стойких к коррозии (винипласт и др.), а металлические покрывают защитным покрытием, не разрушающимся под действием кислот и щелочей (перхлорвиниловым или бакелитовым лаком).
Требования к вентиляции и освещению. Эксплуатация участков пайки, не оборудованных местной вытяжной вентиляцией, запрещается. Вентиляционные установки должны включаться до начала работ и выключаться после их окончания. Работа вентиляционных установок должна контролироваться с помощью специальной сигнализации (световой, звуковой).
8.7 Вопрос экологии
Количество поступающих в атмосферу отходов достигает колоссальных размеров. Наиболее остро экологическая проблема стоит в городах, где на относительно незначительной территории сконцентрировано большое количество промышленных объектов, транспорта и где сосредоточено более 1/3 всего населения нашей планеты.
Вредные вещества, содержащиеся в воздухе даже в незначительных концентрациях, способны проникать в организм человека различными путями с разнообразными клиническими проявлениями. Загрязнение отходами производства открытых водоемов ухудшает их санитарное состояние, делает их использование в культурно-оздоровительных целях, а порой и для хозяйственного питьевого водоснабжения.
Если рассматривать отдельно электротехническую промышленность, а в частности производство печатных плат, то нужно отметить, что в процессе изготовления печатной платы должны соблюдаться правила и положения, направленные на предотвращение загрязнения окружающей среды, чтобы хоть как-то компенсировать загрязнение природы, нужно соблюдать законы и постановления, принятые с этой целью, а также требования техники безопасности, которые вплотную соприкасаются с требованиями охраны окружающей среды.
Это, во-первых, меры, которые должны применяться против загрязнения атмосферы от ядовитых паров хлористого водорода и окиси углерода, выделяющихся при пайке с припоями, а также паров фтора, выделяющихся при ожоге проводов с фторопластовой изоляцией.
Во-вторых, должны применяться меры для изоляции остатков кислоты, легко воспламеняющихся жидкостей от общей линии канализации.
В-третьих, отходы производства (обрезки изоляции, плат) должны сдаваться для дальнейшей переработки с целью последующего использования.
Для того чтобы снизить уровень загрязнений, хотя бы до минимального уровня, необходимо применять специальное оборудование, например, для очистки вентиляционного воздуха необходимо использовать фильтры, которые нейтрализовали бы токсичные вещества. Для снижения промышленных выбросов необходимо искать новые технологические решения, с помощью которых был бы возможен переход на новые методы производства, с минимальным загрязнением окружающей среды.
8.8 Выводы по охране труда
Для защиты рабочих, занятых в технологических процессах изготовления устройства, от воздействия опасных и вредных факторов необходимо проводить следующие организационные мероприятия: использование специальных помещений, оборудованных для обеспечения безопасных условий труда; содержание этих помещений в чистоте; использование специальной мебели и одежды. Кроме того, должен осуществляться периодический контроль состояния охраны труда на предприятии.
Кроме организационных мероприятий необходимо проводить технические мероприятия: следить за загрязненностью и загазованностью производственных помещений, поддержание температурно-влажностного режима.
Заключение
В данном дипломном проекте, который называется “охранная система с дистанционным управлением” разработано устройство, предназначенное для охраны материальных ценностей от пожара и проникновения злоумышленников. Устройство подключается к персональному компьютеру и позволяет все настройки и управление осуществлять с помощью специальной программы поддержки. Кроме того, устройство может управляться с помощью пульта дистанционного управления, применение которого делает данное устройство удобным в эксплуатации.
Данное устройство разработано в первую очередь для охраны компьютерных классов в учебных заведениях и учреждениях, однако может также применяться на промышленных объектах.
Схема построена на современной элементной базе. Ядром устройства является высокоскоростной микроконтроллер семейства PIC18F452.
В результате проектирования было разработано устройство со следующими технико-экономическими показателями:
Таблица 9.1 – охранная система с дистанционным управлением
|
- Габариты |
120мм×70мм×35мм; |
|
- Масса |
250 гр.; |
|
- Коммутируемая нагрузка |
до 1 кВт; |
|
- Рабочая температура |
-40…+60°C; |
|
- Потребляемый ток |
304мА; |
|
- Себестоимость прибора |
(2088,3 руб./ед.) |
|
- Цена блока |
(2896,15 руб./ед.) |
Данные показатели соответствуют техническому заданию на разработку устройства.
Список литературы
1. Однокристальные микроконтроллеры Microchip: PIC16F8X : Пер с англ. / Под ред. А. Н. Владимирова. — Рига: ORMIX, 1996. — 96 с.
2. Долгий А. В. Разработка и отладка устройств на микроконтроллерах. // Радио.— 2001.— №5.- №12; 2002.— №1.
3. Кобахидзе Ш. Г. Микроконтроллеры для начинающих и не только. // Радио.— 2000.— №2.- №5.
4. Хоровиц П., Хилл У. Искусство схемотехники: Пер. с англ. — Изд. шестое. М.: Мир, 2001. — 704 с.
5. Сучков Д. И. Основы проектирования печатных плат в САПР P-CAD 4.5, P-CAD 8.5 – 8.7 и ACCEL EDA. — М.: Горячая линия-Телеком, 2000.— 620 с.
6. С. П. Павлов, Л. С. Виноградов, Н. Ф. Крылова и др.; Под ред. С. П. Павлова. - Охрана труда в радио- и электронной промышленности: Учебник для техникумов. — 2-е изд., перераб. и доп. — М.: Радио и связь, 1985. — 200 с.
Приложение А
Листинг программы
TITLE "Turbo service system"
LIST P=18F452
#include <P18F452.INC>
__CONFIG_CONFIG1H, _OSCS_OFF_1H & _XT_OSC_1H
__CONFIG_CONFIG2L, _BOR_ON_2L & _BORV_27_2L & _PWRT_ON_2L
__CONFIG_CONFIG2H, _WDT_OFF_2H & _WDTPS_128_2H
__CONFIG_CONFIG3H, _CCP2MX_ON_3H
__CONFIG_CONFIG4L, _STVR_ON_4L & _LVP_OFF_4L & _DEBUG_OFF_4L
__CONFIG_CONFIG5L, _CP0_OFF_5L & _CP1_OFF_5L & _CP2_OFF_5L & _CP3_OFF_5L
__CONFIG_CONFIG5H, _CPB_OFF_5H & _CPD_OFF_5H
__CONFIG_CONFIG6L, _WRT0_OFF_6L & _WRT1_OFF_6L & _WRT2_OFF_6L & _WRT3_OFF_6L
__CONFIG_CONFIG6H, _WRTC_OFF_6H & _WRTB_OFF_6H & _WRTD_OFF_6H
__CONFIG_CONFIG7L, _EBTR0_OFF_7L & _EBTR1_OFF_7L & _EBTR2_OFF_7L & _EBTR3_OFF_7L
__CONFIG_CONFIG7H, _EBTRB_OFF_7H
ORG 0x00
BRA START
ORG 008
BRA INT
ORG 018
MOVWF W_TEMP2
MOVFF STATUS,STATUS_TEMP2
MOVFF BSR,BSR_TEMP2
BTFSC PIR1,1
BRA TM2_INT
BTFSC PIR1,TMR1IF
BRA TM1_INT
BTFSC INTCON3,0
BRA INT1_IN
BRA intr
TM2_INTBTFSS REM_FLAG,5;if ALARM not on
BRA TM2_end
BTFSC HL_STAT,5
BRA light
BSF PORTC,5
BRA TM2_end
LightMOVLW .25
MOVWF PULSE_DEL
BSF PORTC,5;ALARM PULSE on
pulsDECF PULSE_DEL
TSTFSZ PULSE_DEL
BRA puls
BCF PORTC,5;ALARM PULSE off
TM2_endBCF PIR1,1
BRA intr
INT1_INMOVFF ALARM_DEL,TMR2
BCF INTCON3,0
BRA intr
TM1_INTMOVLW .25
ADDWF ALARM_DEL
MOVLW .250
CPFSEQ ALARM_DEL
BRA rut
CLRF ALARM_DEL
rutDECF TIME_DEL
BTFSS EVENTS,5
BRA sens
DECFSZ UART_DEL
BRA $+4
BSF EVENTS,4;Set flag "CONNECT ERROR"
;Switch HL1..HL3-------------------------------
rtBTFSC HL_STAT,0;
BSF PORTC,0;Apply changes
BTFSC HL_STAT,1;on flag HL_STAT
BSF PORTC,1;
BTFSC HL_STAT,2;(active)
BSF PORTC,2;
BTFSS HL_STAT,0;
BCF PORTC,0;
BTFSS HL_STAT,1;(desactive)
BCF PORTC,1;
BTFSS HL_STAT,2;
BCF PORTC,2;
BCF PIR1,TMR1IF
intrMOVFF BSR_TEMP2,BSR
MOVF W_TEMP2,W
MOVFF STATUS_TEMP2,STATUS
RETFIE
;-------Coder for digits printing----------------------
CODERRLNCF WREG;WREG=WREG*2
ADDWF PCL,F;Step
RETLW 30;'0'
RETLW 31;'1'
RETLW 32;'2'
RETLW 33;'3'
RETLW 34;'4'
RETLW 35;'5'
RETLW 36;'6'
RETLW 37;'7'
RETLW 38;'8'
RETLW 39;'9'
;-------Interrupt sub>routines-------------------------
INTMOVWF W_TEMP
MOVFF STATUS,STATUS_TEMP
MOVFF BSR,BSR_TEMP
MOVFF TMR0L,PERIOD;capture timer value
CLRF TMR0L
;-------
anothBTFSC FLAG,2;If parity bit will be received...
BRA PARITY;
BTFSC FLAG,1;If start bit was received...
BRA BIT_AN;
BTFSC FLAG,0;If "begin bit" set,then
BRA RES_AN;goto to analizing bit.
;
BTFSC INTCON,TMR0IF
LFSR FSR1,IRDA1
MOVLW B'00000001';set "begin receiving",
MOVWF FLAG;Reset flag "timer overflow"
CLRF COM_BUF;clear variables
BCF INTCON,TMR0IF
CLRF BIT;
BRA int_end;
RES_ANBTFSC INTCON,TMR0IF;If TMR0 overflow then error
BRA err
;Verifing...
MOVLW 0x6D;4 ms13 ms
CPFSGT PERIOD;normal 15 ms
BRA err;error if time is short
MOVLW 0xCB;6 ms17 ms
CPFSLT PERIOD;
BRA err;error if time is long
BSF FLAG,1;Set flag "START BIT"
BRA int_end
BIT_ANBTFSC INTCON,TMR0IF
BRA err
MOVLW 0x46;23-2.3 ms
CPFSLT PERIOD;12 ms
BRA err;error if time>H2 (normal 10 ms)
MOVLW 0x1A;old=43
CPFSGT PERIOD;0A-0.7 ms3 ms
BRA err;error if time<L0 (normal 5 ms)
;END of verifing
RLNCF COM_BUF;
MOVLW 0x30;14<X<1A
CPFSLT PERIOD;
BSF COM_BUF,0;if time>H0 then bit is "1"
CPFSGT PERIOD;
BCF COM_BUF,0;if time<H0 then bit is "0"
INCF BIT,F;
MOVLW .8
CPFSLT BIT
BSF FLAG,2;Next bit will be parity
BRA int_end;
PARITYBTFSC INTCON,TMR0IF
BRA err
MOVLW 0x46;23-2.3 ms
CPFSLT PERIOD;12 ms
BRA err;error if time>H2 (normal 10 ms)
MOVLW 0x1A;0A-0.7 msold=43
CPFSGT PERIOD;3 ms
BRA err;error if time<L0 (normal 5 ms)
MOVLW 0x30
CPFSLT PERIOD;
BSF FLAG2,0;if time>H0 then bit is "1"
CPFSGT PERIOD;
BCF FLAG2,0;if time<H0 then bit is "0"
;create received byte
MOVFF IRDA2,COMMAND
MOVFF IRDA3,PASS1
MOVFF IRDA4,PASS2
MOVFF IRDA5,PASS3
MOVFF IRDA6,PASS4
BSF REM_FLAG,3;Set flag "COMMAND" not executed
int_endBCF INTCON,INT0IF
MOVFF BSR_TEMP,BSR
MOVF W_TEMP,W
MOVFF STATUS_TEMP,STATUS
RETFIE
;-------Start of program----------------------------
STARTCLRF PORTA;
CLRF PORTB;Clear
CLRF PORTC;I/O ports
CLRF PORTD;
CLRF PORTE;
MOVLW B'00001111';
MOVWF TRISA;
SETF TRISB;
MOVLW B'11011000';
MOVWF TRISC;
CLRF TRISD;
CLRF TRISE;
MOVLW B'11010101';TMR0 16-bit counter
MOVWF T0CON;sub>divider 1:64
;interrupts
MOVLW B'11010000';
MOVWF INTCON;
MOVLW B'10000000';INT1 fall_pulse
MOVWF INTCON2;
MOVLW B'00001000';Enable INT1 interrupt
MOVWF INTCON3;
MOVLW B'00000011';
MOVWF PIE1;interrupt TMR1,TMR2 enable
MOVLW B'00000000';All interrupts low priority
MOVWF IPR1;
MOVLW B'00000000';
MOVWF IPR2;
BSF RCON,7;Приоритетная система прерываний вкл.
;TMR1 setup
MOVLW B'00000001';TMR1 is active
MOVWF T1CON;sub>divider 1:1
;TMR2 setup
MOVLW B'00001111';Enable, sub>divider 1:16
MOVWF T2CON;
;A/D setup
MOVLW B'00000001';A/D enable
MOVWF ADCON0;CLK is Fosc/4
MOVLW B'01001110';Left justify;0 analog channels
MOVWF ADCON1;VDD and VSS references
;MSSP setup
MOVLW 0x0A;100 kHz
MOVWF SSPADD;Set speed
MOVLW B'00101000';MSSP enabled,
MOVWF SSPCON1;I2C Master mode
;Usart setup
MOVLW B'00100000';Asynchronic,8bit transfer
MOVWF TXSTA;low speed mode
MOVLW B'10010000';UART on
MOVWF RCSTA
MOVLW B'00011001';2400 baud,error +1.67%
MOVWF SPBRG
CLEARLFSR FSR0,00;
clCLRF POSTINC0;
MOVLW .100;
CPFSEQ FSR0L;
BRA cl;
;-------Main program block------------------------------
PROGALFSR FSR1,IRDA1
RCALL I2C_STOP_
MOVLW B'10010000'
MOVWF SLAVE_TRM
MOVFF SLAVE_TRM,I2C_ADDR
MOVLW 0xEE
MOVWF I2C_DATA
RCALL I2C_COM;Command 'start converting'
RCALL LCD_INIT;
CLRF TBLPTRU;Set message adress 7000
MOVLW B'01110000';
MOVWF TBLPTRH;
CLRF TBLPTRL;
RCALL LCD_LD1;
RCALL LCD_LD2;
RCALL LCD_PR1;
RCALL LCD_PR2;Приветствие
RCALL DELL;Pause
RCALL LCD_CLR1
RCALL LCD_CLR2
BSF EVENTS,4
;-------Start program---------------------------------------
CONNECTRCALL M_NO_CONN;Show message "Нет подлючения!"
MOVLW B'00100000';
MOVWF TBLPTRL;Show message "Температура"
RCALL LCD_LD2;
RCALL TERM_DISP;Measure and display temperature
RCALL ADC_CONV
RCALL LCD_PR2
begBTFSC EVENTS,4
RCALL UART_ST
RCALL TERM_DISP;Measure and display temperature
RCALL ADC_CONV
;1-----Start receiving!-----------------
LFSR FSR0,PACK1
PACK_RXRCALL UART_RD
BTFSC EVENTS,4;If CONNECT ERROR then restart
BRA CONNECT
MOVFF UART_DATA,POSTINC0
MOVLW 0x4B
CPFSEQ FSR0L
BRA PACK_RX
MOVFF PACK2,HL_STAT
MOVFF PACK3,TERMAL_L
MOVFF PACK4,TERMAL_H
MOVFF PACK5,AD_VREF
MOVFF PACK6,SENSOR_MODE
;-Transmite-----------------------------------------
PACK_TXMOVLW .16;Set address of device
MOVWF PACK_OUT1;
MOVFF SENS1_STAT,PACK_OUT2;
MOVFF SENS2_STAT,PACK_OUT3;
MOVFF AD,PACK_OUT4;
MOVFF TERMAL,PACK_OUT5;
MOVFF ADD_BYTE,PACK_OUT6
LFSR FSR0,PACK_OUT1;Write data to terminal
txMOVF POSTINC0,W;
RCALL UART_WRT;
RCALL M_DEL;6 bytes...
MOVLW 0x55;
CPFSEQ FSR0L;
BRA tx;
asddRCALL LCD_PR1
RCALL LCD_PR2
;+++++++++++Place for main sub>routine+++++++++++++++
BTFSS HL_STAT,7
BRA m_block
BCF SENS1_STAT,5;Reset flag "Change status HL1"
BCF SENS1_STAT,6;Reset flag "Change status HL2"
BCF SENS1_STAT,7;Reset flag "Change status "HL3"
BCF SENS2_STAT,6;Reset flag "Was command from IRDA"
BCF SENS2_STAT,7;Reset flag "Change security mode"
sens_vrCLRF PASS1
CLRF PASS2
CLRF PASS3
CLRF PASS4
BTFSC SENS1_STAT,0;Set flag "perimetr error"
BSF EVENTS,1;if sensors unlock
BTFSC SENS1_STAT,1;
BSF EVENTS,1;
BTFSC SENS1_STAT,2;
BSF EVENTS,1
re2MOVF AD_VREF,W
CPFSLT AD
BSF EVENTS,1
re3MOVF TERMAL_H,W
CPFSLT TERMAL
BSF EVENTS,2;if TERMAL>TERMAL_H
MOVF TERMAL_L,W;
CPFSGT TERMAL;if TERMAL<TERMAL_L
BSF EVENTS,3;
BTFSS EVENTS,2;
BRA re4
RCALL M_FIRE;FIRE CONTROL
BSF REM_FLAG,5
BRA gym2
re4BTFSS HL_STAT,3;if mode=off then ok
BRA gym
RCALL M_ACES_NO;
BTFSC EVENTS,1;If sensors unlock,
RCALL M_PERIM;Show message "Периметр нарушен"
BTFSC EVENTS,1
BSF REM_FLAG,5
BTFSC EVENTS,3
BSF REM_FLAG,5
BTFSC EVENTS,3
RCALL M_COLD;Show message "Переохлаждение!"
BRA gym2
;+++++++++++End of place for main sub>routine+++++++++++++++++++
gymRCALL M_ACES_OK
gym2BTFSS HL_STAT,4;Verifying reset command from PC
BRA main_end
BCF EVENTS,1;Reset perimetr
BCF EVENTS,2;Reset fire
BCF EVENTS,3;Reset cold
BCF EVENTS,4;Reset connect error
BCF PORTC,5;Reset ALARM_LIGHT
BCF PORTA,5;Reset flag for external system
BCF ADD_BYTE,0
BCF REM_FLAG,5;Reset flag ALARM_LIGHT
CLRF PASS_ERR
main_endBRA beg
;++++++++++++++++++++++++++++++++++++++++++++++++++++++
GOTO FINAL
;--------------------------------------------------------
;Different sub>routines
;--------------------------------------------------------
M_DELMOVLW .49
MOVWF CYC2
mdl1DECF CYC2,F
MOVLW .255
MOVWF CYC
mdlDECF CYC,F
TSTFSZ CYC
BRA mdl
TSTFSZ CYC2
BRA mdl1
RETURN
;--------------------------------------------------------
UART_WRTMOVWF TXREG
BTFSS PIR1,4
BRA $-2
BCF PIR1,4
RETURN
;--------------------------------------------------------
UART_STBCF EVENTS,0
BCF EVENTS,1
BCF EVENTS,2
BCF EVENTS,3
BCF EVENTS,5
BCF PIR1,5
BCF EVENTS,4
BCF RCSTA,4
BSF RCSTA,4
ur_stBTFSS PIR1,5
BRA $-2
BCF PIR1,5
MOVFF RCREG,UART_DATA
MOVLW .238
CPFSEQ UART_DATA
BRA ur_st
RETURN
;--------------------------------------------------------
UART_RDRCALL UART_WAIT
MOVFF RCREG,UART_DATA
RETURN
;--------------------------------------------------------
DELLMOVLW .8;8-Time delay.
MOVWF TIME_DEL;Variable LSD is
tmdTSTFSZ TIME_DEL
BRA tmd
RETURN
;--------sub>-zero termo-correction-------------------------
TERM_CORRMOVLW 2D;"-"
MOVWF MSD;MSD used temporary
BCF SENS1_STAT,3
MOVF I2C_BYTE1,W
SETF I2C_BYTE1
sub>WF BYTE1
RETURN
;-------------------------------------------------------
TERMOSCANMOVFF SLAVE_TRM,I2C_ADDR;Slave-address DS1621
MOVLW 0xAA;Command "Read temperature"
MOVWF I2C_DATA
RCALL I2C_2RD
RETURN
;-----------------------------------------------------------
M_NO_CONNMOVLW B'1110000';
MOVWF TBLPTRL;Show message "Нет подключения!"
RCALL LCD_LD1;
RCALL LCD_PR1
RETURN
;-----------------------------------------------------------
M_ACES_OKMOVLW B'00110000';
MOVWF TBLPTRL;Show message "Доступ разрешен"
RCALL LCD_LD1;
RCALL LCD_PR1
RETURN
;-----------------------------------------------------------
M_FIREMOVLW B'01000000';
MOVWF TBLPTRL;Show message "Пожарная тревога!"
RCALL LCD_LD1;
RCALL LCD_PR1
BSF PORTA,5;Set flag for external system
RETURN
;-----------------------------------------------------------
M_PERIMMOVLW B'01010000';
MOVWF TBLPTRL;Show message "Периметр нарушен!"
RCALL LCD_LD1;
RCALL LCD_PR1
BSF PORTA,5;Set flag for external system
RETURN
;-----------------------------------------------------------
M_COLDMOVLW B'10000000';
MOVWF TBLPTRL;Show message "Переохлаждение!"
RCALL LCD_LD1;
RCALL LCD_PR1;
BSF PORTA,5;
RETURN
;-----------------------------------------------------------
M_ACES_NOMOVLW B'01100000';
MOVWF TBLPTRL;Show message "Доступ запрещен!"
RCALL LCD_LD1;
RCALL LCD_PR1
RETURN
;-----------A/D Converting----------------------------------
ADC_CONVMOVLW D'20'
MOVWF DEL_ADC
DECFSZ DEL_ADC,F
BRA $-2
BSF ADCON0,GO;Start A/D conversion
WaitBTFSS PIR1,ADIF;Wait for conversion to complete
BRA $-2
BCF PIR1,ADIF
MOVFF ADRESH,AD
RETURN
;-------Looped end of program----------------------------
FINALNOP
BRA FINAL
END