Вантажопідйомна транспортуюча техніка
Вантажопідйомна транспортуюча техніка. Призначення, класифікація підйомних машин
Машини безперервного транспорту призначені для переміщення насипних вантажів безперервним потоком, а штучних – з певним інтервалом.
Класифікація конвеєрів:
а) стічковий;
б) пластинчатий;
в) скрипковий;
г) рівневий;
д) елеватор.
Характеристика вантажів
Вантажі поділяються на: насипні та поштучні
Вантажі поділяють за крупністю:
пиловидні – 0,05 мм;
порошкоподібні – 0,05–05 мм;
дрібнозернисті – 0,5 – 1 мм;
крупнозернисті – 1–10 мм;
дрібнокускові – 10–60 мм;
середньокускові – 60–160 мм;
крупнокускові – 160–320 мм;
особливо крупні > 320 мм.
За насипною щільністю:
Ступінь рухливості залежить від сил внутрішнього тертя та щеплення. Рухливість матеріалу залежить від кута природнього укосу, який для спокою становить 45–500, для руху – 27–350.
Коефіцієнт тертя спокою – 0,58–1,2; руху – 0,29–07.
Абразивність, крихкість, змерзання, липкість, пошкодженість, вибуховість, самозаймистість, корозійна активність.
Продуктивність машин безперервного транспорту
Вихідними даними для проектування є:
річний обсяг продукції Пр (т.м3)/рік;
характеристика вантажів;
траса;
Розрізняють продуктивність:
масову – т/год;
об’ємну – м3/год;
поштучну – шт./год
Годинна продуктивність:
П=П>р> К>н>/(Z К>м> Т>р>)
Т>р> – число годин у році;
Z – число одночасно працюючих машин;
К>м> – 0,6–0,9 коефіцієнт машинного часу;
К>н >– 1,1–1,5 коефіцієнт нерівномірності подачі вантажу
Для машин безперервної дії:
П = 3600 Аνρ
А – площа поперечного перерізу матеріалу м2;
ν – швидкість м/с;
ρ – густина
Продуктивність машин через лінійне навантаження:
q
– лінійне
навантаження

i – місткість судини;
p – крок судини;
φ – коефіцієнт заповнення.
При переміщенні поштучних вантажів вагою G або порціями по Z штук
 ;
;

Опір
рухові тягових органів конвеєрів
Траса конвеєра складається з прямолінійних і криволінійних відрізків, які можуть розташовуватися під різними кутами.
Енергія двигуна витрачається на подолання опору переміщення вантажу і частин машини та на піднімання вантажу.
При розрахунку трасу розділяють на прямолінійні та криволінійні відрізки, визначають опір рухові та натяг тягового органу при сталому русі на кожному відрізку траси, а потім визначають загальний опір.
Опір руху на прямолінійному відрізку траси розглянемо для таких способів перенесенні на гнучкому органі, який рухається по стаціонарних роликових опорах.
2) Перенесення по постелі з ходовими роликами;
3) Волочіння по нерухомому жолобу скрипками;
4) Суцільне волочіння скрипками зануреними в шар матеріалу.
а) Сила опору робочої нитки:

– неробочої нитки:
 +↑; -↓;
+↑; -↓;
q – лінійне навантаження від вантажу н/м;
q>0> – лінійне навантаження рухомих частин конвеєра;
L – довжина відрізку траси;
ω – коефіцієнт опору рухові;
β – кут нахилу конвеєра;
 – лінійне навантаження
від обертових частин
– лінійне навантаження
від обертових частин
G>р> – вага ролика;
Р>р> – крок ролика;
q>p> – це саме для холостої нитки.
б) вантаж переміщується по настелі:



ω>1> – коефіцієнт опору руху ходових роликів по напрямних;
 ;
;
t – коефіцієнт тертя в підшипнику;
К = 5–20∙10-4 – коефіцієнт тертя кочення ролика по напрямних;
D – зовнішній діаметр ролика;
d – діаметр ролика;
К>р> = 1,1…1,4 – коефіцієнт опору в ребардах коліс.


f – коефіцієнт опору руху вантажу по жолобу;
 -
коефіцієнт опору руху ланцюга по жолобу;
-
коефіцієнт опору руху ланцюга по жолобу;
Опори на криволінійних відрізках траси
Опори складаються з опорів тертя в підшипнику та опору жорсткості тягового органу
Опір підшипника мал. 143д
D – діаметр барабана, блока чи зірочки;
G – загальна вага блока барабана зірочки разом з валом;
ρ – натяги набігаючих і збігаючих віток
f – коефіцієнт тертя в підшипниках;
d – діаметр вала.
Для неприводних барабанів
α – кут обхвату
Опір від жорсткості робочого органу
ε – 0,01 – коефіцієнт жорсткості
Опір від жорсткості ланцюга обумовлений тертям шарніра
d – діаметр валика ланцюга;
f>n> – коефіцієнт тертя в шарнірі.
Опір при русі по криволінійним напрямним, або по батареї роликів
ω´ – коефіцієнт опору руху в точці де починається α – кут обхвату
Натяг стрічки на збіжній нитці відхиляючого барабана більший ніж на набігаючій

α – 800 Кб = 1,03…1,04
α – 900 Кб = 1,02–1,03
α <900 КБ = 1,01–1,02
Потужність двигуна конвеєра витрачається на подолання опорів горизонтального переміщення вантажу, піднімання вантажу, опору холостого ходу а такоз опорів завантаження W>з> і розвантаження W>р>

G>в> – вага вантажу
G>к> – вага рухомих елементів конвеєра
Потужність двигуна
υ – швидкість стрічки η∙к.к.д. приводу
Враховуючи,
 ,
,  ,
,

 ; Н
= Lsin
β
; Н
= Lsin
β
 +↑
-↓
+↑
-↓
К – коефіцієнт, що враховує вплив завантажувальних і розвантажувальних пристроїв.
Стрічкові конвеєри
Служить для неперервного переміщення сипких та дрібнопоштучних вантажів в горизонтальному, похилому та вертикальному
Переваги:
Неперервність транспортування
Простота
Надійність, зручність обслуговування
Можливість автоматизації
Недоліки:
Велика вартість і недовговічна стрічка
Складність транспорування гарячих, липких, кромкових і агресивних матеріалів
Будова
конвеєра Вст = 0,3–0,4 м,
 V
= 0,8–4 до 8 м/с
V
= 0,8–4 до 8 м/с
1) стрічка, 2) роликові опори, 3) постав, 4) натяжний барабан, 5) натяжний пристрій, 6) двигун, 7) редуктор, 8) приводний барабан, 9) завантажувальний пристрій, 10) очисний пристрій.
Стрічкові конвеєри можуть бути стаціонарні і пересувні
По формі: 1) горизонтальні, 2) зігнуті, 3) похилі, 4) комбіновані
По типу робочого органу: 1) стрічкові, 2) стрічково-канатні, 3) стрічково-ланцюгові
При кутах > 600 використовують покриваючу стрічку
Для вертикального підйому використовують штангову стрічу (ш)
Конвеєрні стрічки бувають
За конструкцією:
гумотканні;
металеві (В = 0,6–1 мм);
сітчасті;
скловолоконні;
з рифленою поверхнею;
спеціальні.
Троси діаметром від 2,1–11,6 мм
Каркас – бавовна, ловсон, капрон
Обкладка – гума, поліетилен, поліепхлорид
Конвеєрні постави
Ролики, опори спираються на металоконструкції, яка носить назву постов. Вони бувають жорсткі і канатні.
Роликові опори складають 30% вартості. Вони бувають рядові, центрувальні, перехідні, амортизувальні.
За кількістю роликів:
1-роликові (а);
2-роликові (б) α = 15–200;
3-роликові (в) α = 200, 300 360 450;
5-роликові (г) α = 22,50, α>1>= 450, α = 180, α>1>= 540.
Ø роликів 63–194 мм
Крок роликів t>р> = 0,9…1,5 м
t>нр> = 2 t>р>
Розділ №4
Найчастіше
використовуються трироликові опори.
Центрування може повертати відносно
вертикального шкворня з закріпленою
на рамі 1. Збігаюча стрічка натискає на
ролик 2 і повертає опору на кут α. Основні
ролики, працюючи під кутом до стрічки,
повертають стрічку 1 в центральне
положення під дією складової вектора
 .
Можливий варіант, коли при натисканні
на ролик 2 вмикається електродвигун для
повороту електроопори.
.
Можливий варіант, коли при натисканні
на ролик 2 вмикається електродвигун для
повороту електроопори.
Крок роликових опор – через 10–12 роликів.
Амортизувальні ролико-опори застосовують для зменшення динамічних навантажень при падінні великих кусків.
Вони можуть бути на пружинах.
(г) Гумопневматичні
Конвеєрні ролики бувають гладенькі (г), фужеровані (ф), амортизувальні (а), дискові (д).
Залежно від умов роботи легкі (кульові підшипники) і важкі (роликові підшипники).
За конструкцією:
з насрізною необертовою віссю
напіввісь
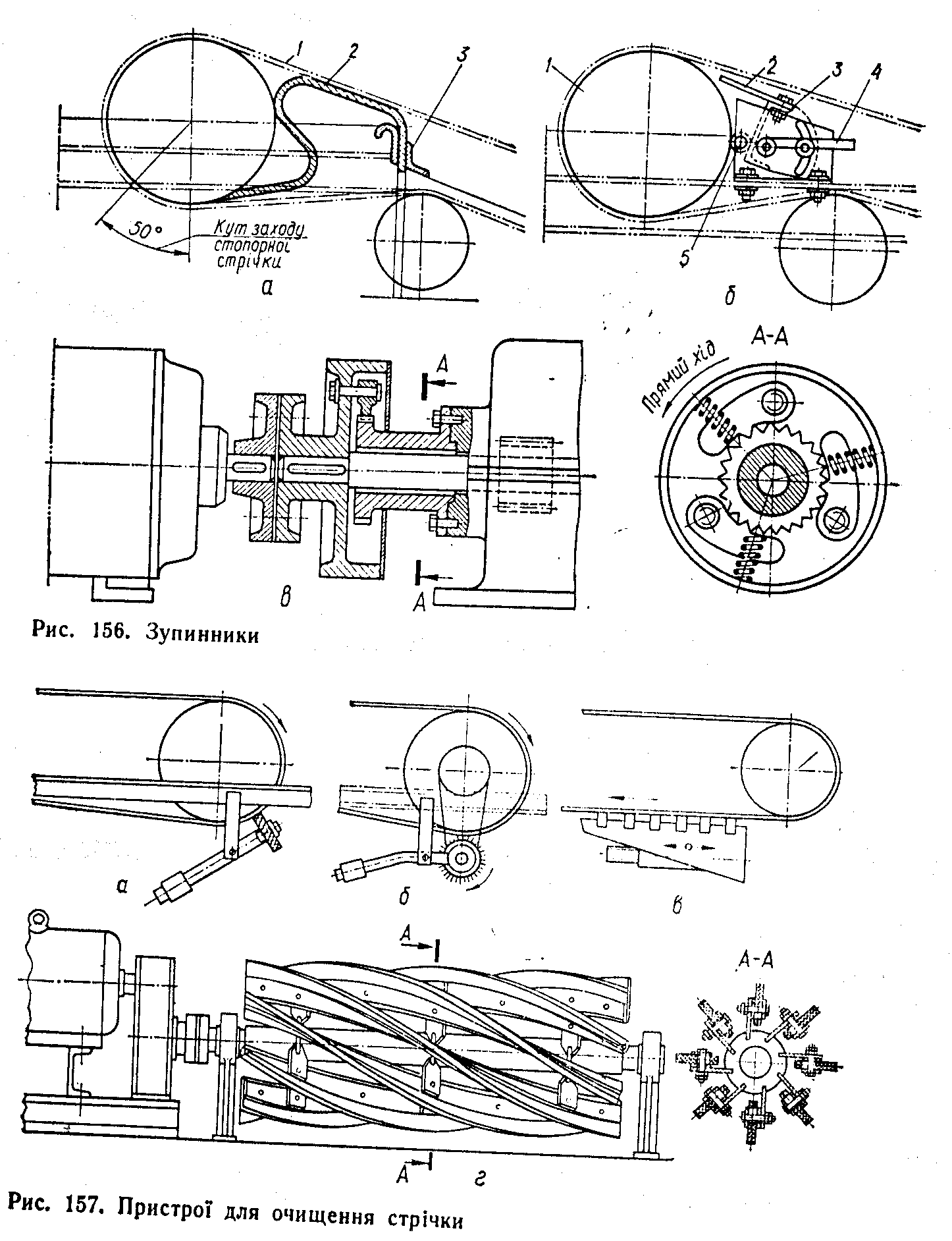
Приводи конвеєрів
Привод складається з двигуна, редуктора, муфт і зупинників або гальм.
Залежно від необхідного тягового зусилля конвеєрні приводи бувають одно – дво- і багатобарабанні.
а) однобарабанний привод α = 2200
б) двобарабанний привід для важких матеріалів
1,2 приводні барабани
в) з притискним роликом
Двобарабанні приводи бувають: 1) з жорстким зв’язком між барабаном, 2) з диференціювальним редуктором (152д) і з роздільним приводом.
ZЦ>1> і ZЦ>2> – конічні колеса
ZС>1> і ZС>2> – сателіти
При обкатуванні сателітів по колесах ZЦ>1> і ZЦ>2> останні дістають однакову кутову швидкість за рахунок основного передаточного відношення.
В приводах великих конвеєрів встановлюють гідродинамічні муфти для усунення буксування.
Встановлення двигунів постійного струму дає змогу регулювання швидкості.
При необхідності контактності застосовують мотир барабани, коли в середині барабана розташований електродвигун. Перспективним є застосування високомолянтних гідроприводів які виключають мех. передачі між двигуном і коробкою.
В перспективі можливе використання лінійних асинхронних двигунів.
Барабани виготовляються зварними а також литі, вони бувають циліндричні і бочкоподібні, збільшення коефіцієнту зчеплення досягають футсровкою гуми або пластмаси.
Натяжні механізми
Служать для компенсації видовження стрічки в процесі роботи, створення необхідних натягів, обмеження провисання.
За принципом дії натяжні механізми поділяють на: 1) механізми періодичної дії (гвинтові), 2) автоматичні (вантажні), 3) гідравлічні, 4) пневматичні.
Автоматичні бувають регульовані в залежності від моменту і нерегулюванні. Натяжний механізм розташовують в місці, де натяг стрічки мінімальних.
За розміщенням механізми бувають: хвостові і проміжні (г).
У великих конвеєрах застосовують поліскости (д). Хід натяжного барабану залежить від довжини конвеєра L та типу стрічки і = 2…1,5% L для гумотканних стрічок і 0,2…0,15% для гумотросових.
Автоматичні натяжні пристрої бувають:
За принципом дії:
безперервної
періодичної
За типом привода:
з електричним (д)
гідравлічним (е)
За законом зміни натягу:
стабілізуючі
слідкуючі
комбіновані
Завантажувальні пристрої
Завантаження стрічки здійснюється за домогою лотка, ширина отвору якого становить (0,6…0,7) В. Кут нахилу стінок (10–150).
Пристрої повинні зменшити руйнування та спрацьовування стрічки в місці завантаження. Для цього живильний лоток встановлюється під кутом (10–150).
Розвантажувальні пристрої
Розвантаження матеріалу може відбуватися через кінцевий барабан або в будь-якій частині конвеєра.
а) б) лужкові розвантажувачі. Вони бувають односторонні та двосторонні.
1) знімними, 2) перекидними, 3) пересувними.
Місце встановлення привода в конвеєрі
При правильному розміщенні привода, зменшується натяг стрічки ведучому барабані і збільшується строк служби при русі вантажу вгору привод доцільно завантажувати зверху при русі вниз на початку навантажувальної нитки.
Загальне правило: для конвеєрів з простою трасою привід доцільно встановлювати в кінці нитки з максимальним натягом.
Зупинники
1. Розрахунок стрічкового конвеєра
Проектний розрахунок починається з визначення товщини стрічки при при заданій продуктивності.
 Т/год
Т/год
Ширину стрічки вибирають за гранулометричними складом. Для рядових матеріалів.
В ≥ (2,7…3,2) α>max>. Для сортованих В ≥ (3,3…4) α, для поштучних В ≥ α>max> + (100…200).
Для визначення ширини стрічки по продуктивності знаходимо площу поперечного перерізу насипного вантажу.
 ;
;
З врахуванням можливостей просипання
в = 0,9 В + 0,05
Площа може мати форму трикутника або трикутника і трапеції (153 б)
В загальному вигляді:
А = К>п> (0,9В – 0,05)2
К>п> – коефіцієнт пропорц. = 240–710
Для масової продуктивності
Для об’ємної:
Для похилих конвеєрів:
К>в> = 0,8…1,0 залежить від кута.
Із двох отриманих значень приймаєм більше, заокруглюєм в більший бік до стандартної ширини.
Ширину стрічки жолобчастої форми
П = (К>в> В2) (К>р1> + К>р2>> >С>в> + gφ>н>) Sυ
К>в> – коефіцієнт використання ширини стрічки;
К>р1> і К>р2> – коефіцієнт, який залежить від форми роликової опори;
С>в> – коефіцієнт уклону стрічки;
φ>н> – кут природнього укосу насипання матеріалу φ>н> = (0,75…0,8) φ;
 ;
;
 ;
;
α – кут нахилу крайніх роликів;
β – кут нахилу конвеєра 15–240;
Швидкість руху стрічки може лежати в межах від 1 до 10 м/с
При встановленні розвантажувального візка швидкість зменшується на 25%.
При наявності плужкових скидачів υ = 0,8–2 м/с. В тихохідних конвеєрах швидкість має забезпечувати відрив матеріала від стрічки при проході кінцевого барабана.
Розрахунок тягових зусиль в приводах
Тягова сила на барабані
F>0> = К (ω>р> + ω>н>)
К – коефіцієнт, що враховує опір при проході барабана та інші зосереджені сили опору.
К = 5,9…3,2 при L до 20 м
К = 2,2…1,04 при L 500 – 2500 м
Потужність двигуна

W>р>; W>н> – опір руху робочої і неробочої вітки
К>3> – коефіцієнт запасу
При однобарабанному
F>0> = S>нб> – S>зб>
Умови відсутності буксування за допомогою ейлера

Максимальне тягове зусилля
F>0>>max> = S>зб> (еfα – 1)
F>0>>max> = К>зч> F>0 >К>зч>> >= 1,3–1,4 – коефіцієнт
Мінімальний допустимий натяг стрічки на ведучому барабані

f = 0,1…0,5
Максимальний
кут отвору однобарабанного типу =

Для двохбарабанного приводу, приводу з натяжним роликом привода зведучою стрічною див. Иванченко с. 302–304
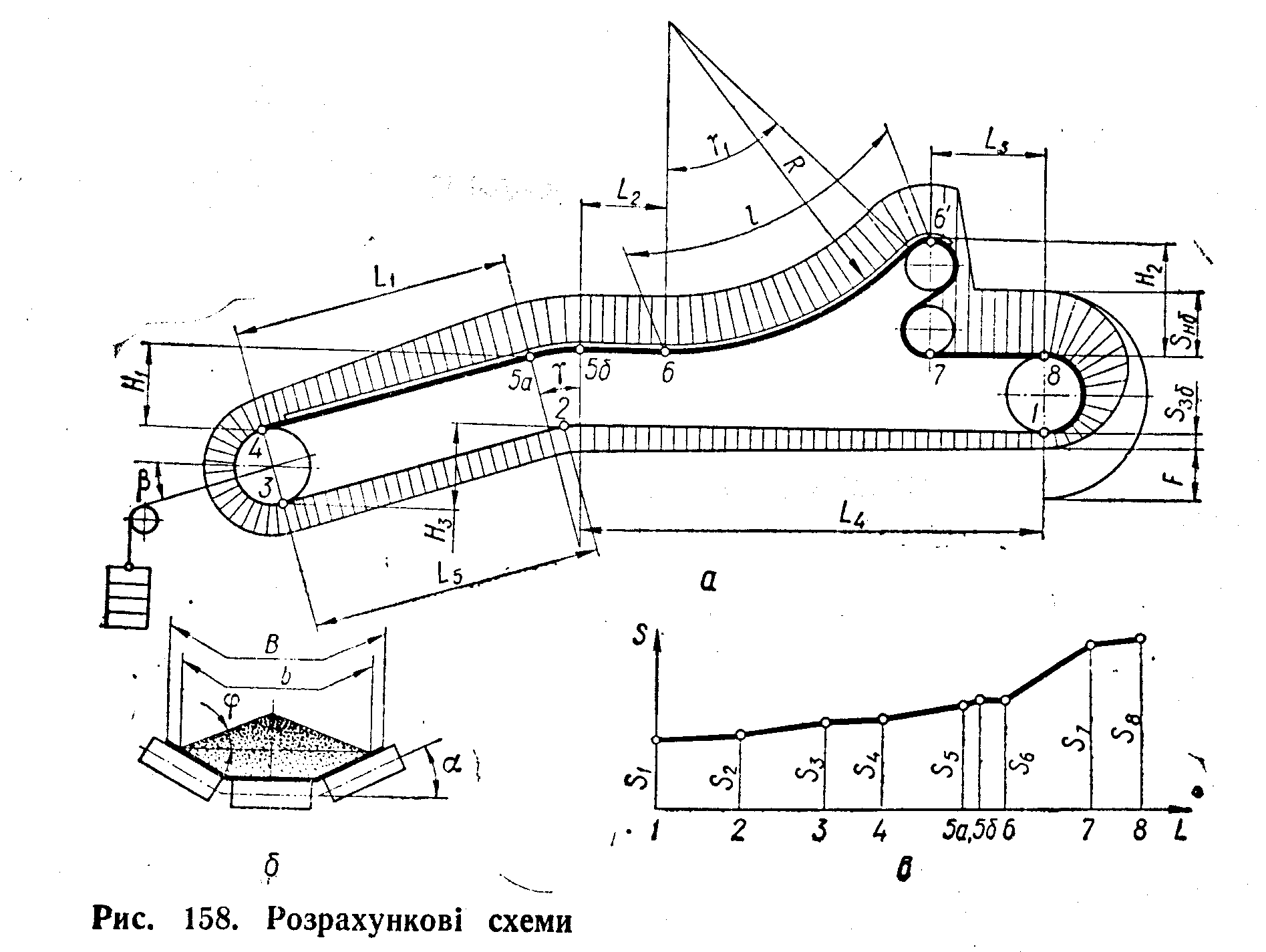
Тяговий розрахунок конвеєра незалежно від складності траси виконують методом обхходу контура коли всю довжину траси конвеєра поділяють на характерні відрізки і постідовно визначають натяг стрічки.
S>i> = S>i> – 1 ± W>i> – 1
S>i> – 1 – натяг у попередній точці траси і – 1 точка
W>i> – 1 – опір на відрізку між точками і – 1 то і + підйом; – спуск
Опір в завантажувальному пристрої
υ – швидкість стрічки;
υ>0> – складова швидкість матеріалу вздовж стрічки (що падає);
К>б> = 1,5 – коефіцієнт, що враховує опір рухові від тертя матеріалу по бокових стінках воронки;
f>с> – коефіцієнт тертя матеріалу стрічки;
h – висота падіння матеріалу.
При проміжному розвантаженні
W>п> = К>0>qB
К>0 >– коефіцієнт опору. К>0> = 2,7 – зернисті і пораховані; К>0> = 3,6 – дрібнокускові
Для поштучних матеріалів
W>п> =Gtc sin (α>n> φ>n>)
G – вага вантажу
α>n> – кут встановлення плужка
φ>n> – кут тертя вантаж. Плужок
Опори очисних пристроїв
W>ек> = Р>ек> В-для скрипкового
Р>ек> = 300…500н/м сила опору для очищення 1 м ширини стрічки
W>щ> = Р>щ>ВV>щ >– щіткового
Р>щ> = 210–250 сухі
Р>щ>> >= 300–350 липкі
Після визначення всіх опорів на трасі знаходимо натяг набіжної та збіжної віток стрічки приводного барабана
S>нб> = S>зб> еfα
По відомим значенням будуєм діаграму мінімальний натяг (S>1>) повинен бути таким, щоб прогин стрічки під дією вантажу, що транспортується дорівнював (1,25…3)% Р>р>
Максимальний прогин стрічки
Ø барабана D = ci c = 125…200, для синтетики с = 150…300
і – кількість прокладок в стрічці і = 3…6
Ø кінцевого і відхильного барабанів
Д>к> = (0,7…0,85) Д>п>
Визначені Ø округляють до прийнятного ряду 160–2500 мм
Розрахунок натяжного ряду
Сила натягу для переміщення візка з барабану
Q>нат> = S>1> + S>2> + W>B>
S>1>= S>n>>,> S>2>= S>зб>
Зусилля натягу в канаті натяжної лебідки

U – кратність полістпасти;
W>B>> >– опір руху візка.
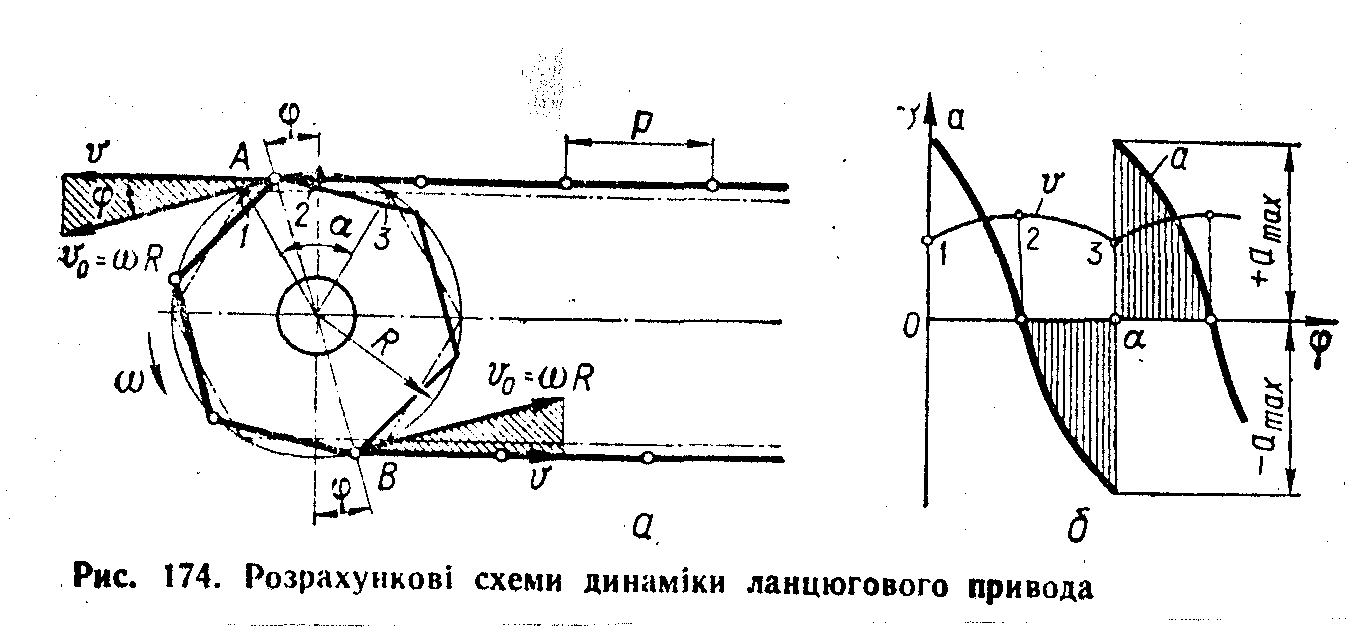
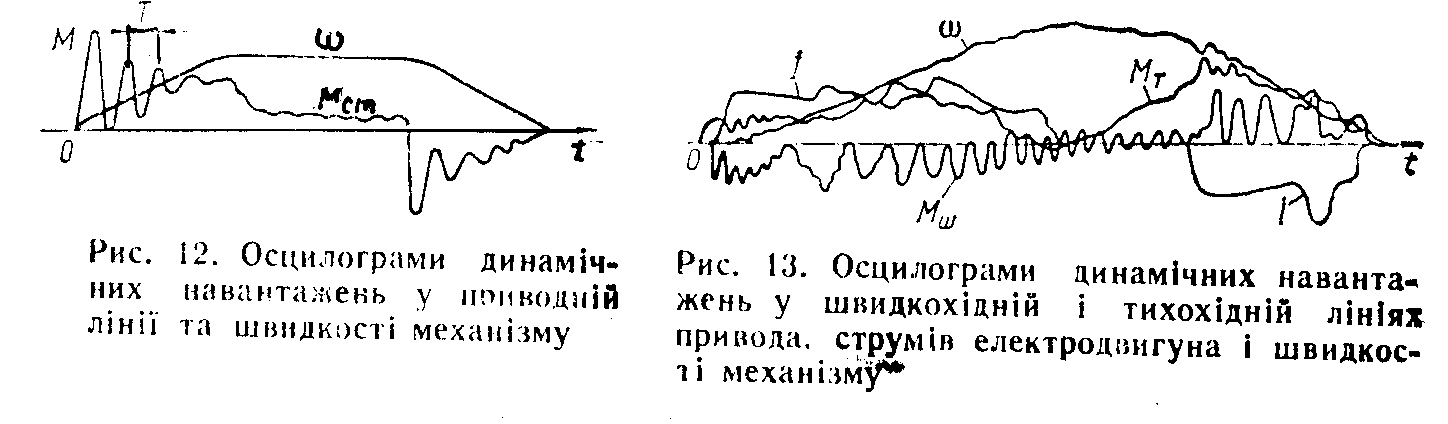
Динаміка стрічкових конвеєрів
Динаміка залежить від характеру вантажу падінню стрічки від великих кусків, удару кусків по стрічці і інших факторів. В період пуску в приводі конвеєра крім статичних навантажень виявляються інежрційні навантаження. В приводі виникають автоколивальні навантаження внаслідок пружного видовження стрічки при пуску не всі маси рухаються одночасно.
Максимальне тягове зусилля на барабані
W>max> = W>ст> п + F>д>
W>ст> п – статична тягова сила в період пуску,
W>ст> п – 1,5 Wcт;
F>д> – динамічна сила.
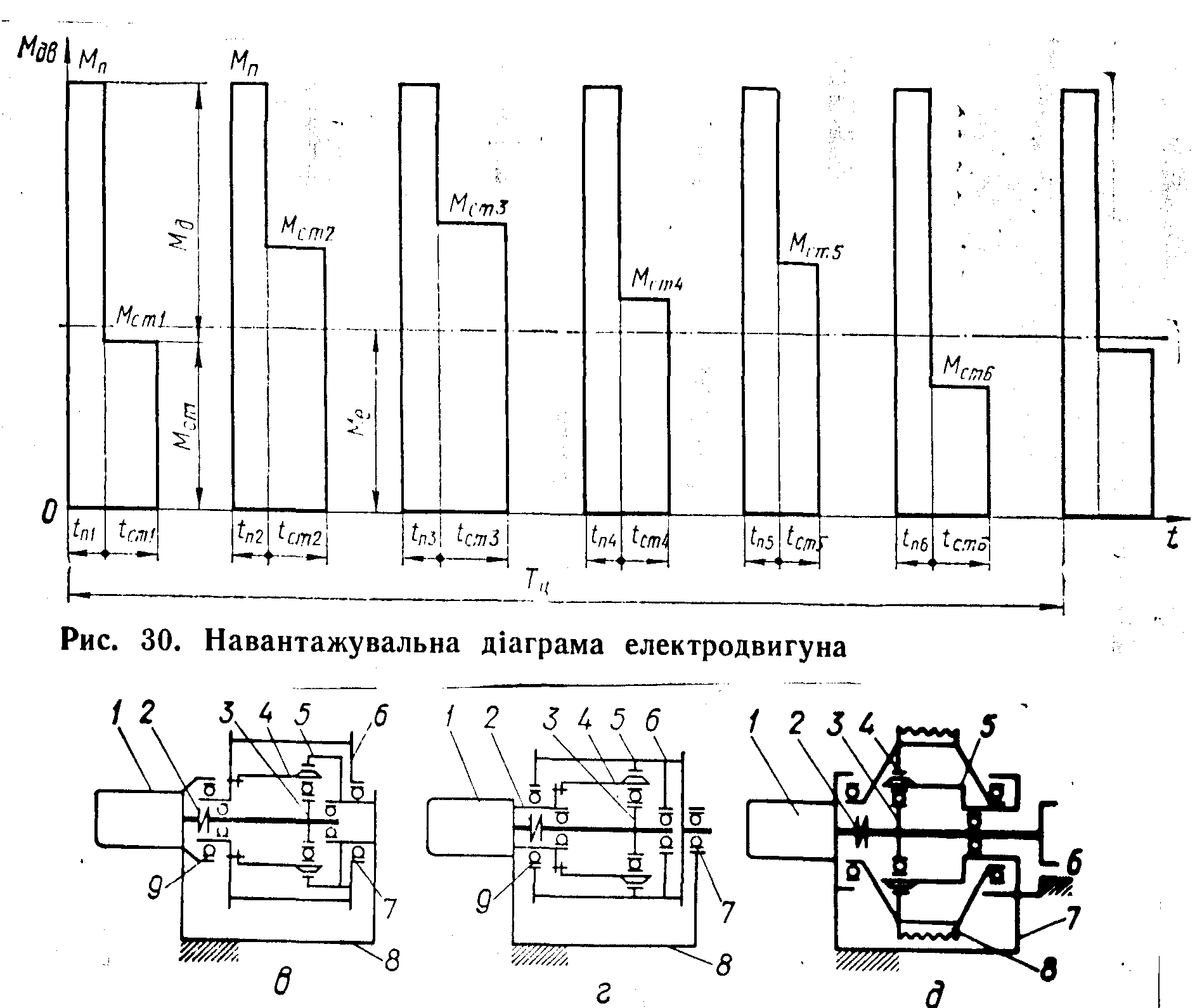
Статичний момент при пуску зведений до вала двигуна
η = 1 – (1 η) К>п> С>0>;
η>п> – к.к.д. при сталому режимі;
С>0> = 0,55…0,6 – коефіцієнт можливого зменшення опору руху конвеєра
К>п>> >= 1,5 – коефіцієнт кратності статичних опорів від тертя при пуску

m>зв> – зведена маса рухомих частин конвеєра і вантажу
m>зв>= К>с>[(m>в> + Гm>с>) L + К>ш>m>об>]
m>в >і m>с> – лінійні маси вантажу та стрічки
m>об> – маса обертових деталей
К>ш> = 0,7…0,9; враховує зменшення колової швидкості частин рухомих мас
К>с> – 0,5…0,7; враховує видовження стрічки.
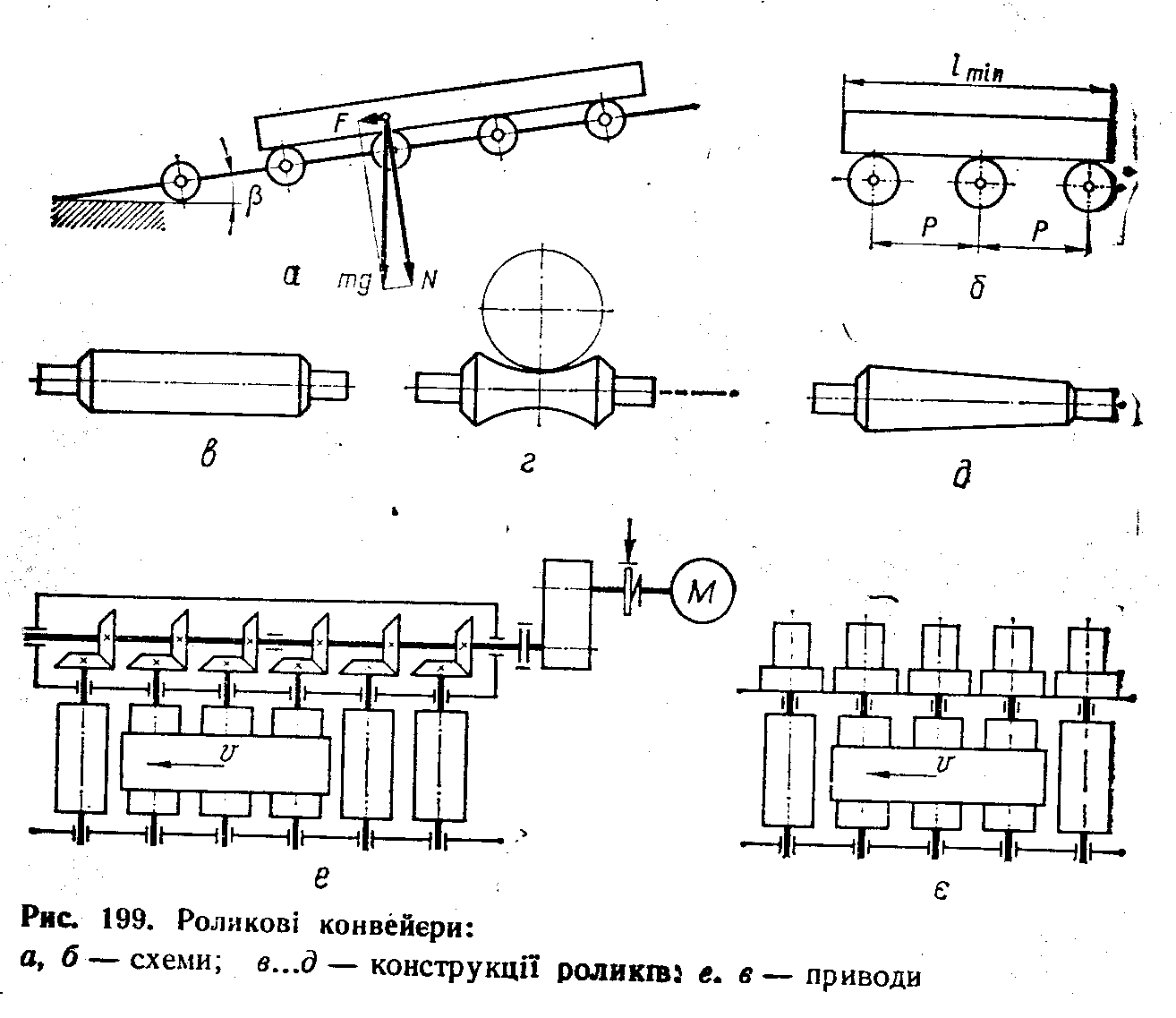
Ланцюгові конвеєри
Тяговим органом є один або декілька ланцюгів, до яких прикріплені пластини, що дозволяє збільшити асортимент вантажів і підвищує надійність. В залежності від конструкції робочого органу вони поділяються на: пластинчасті, скрипкові, ківшеві, візкові, підвісні.
Троси таких конвеєрів більш різноманітні і складні і дозволяють транспортувати вантажі на великі відстані.
Пластинчасті конвеєри
Вони використовуються для транспортування важких поштучних матеріалів, крупно-кускову руду, гарячий агломерат, вапняк, гарячі поковки, продукти штампування.
Бувають довжиною до 2-х кілометрів. Продуктивністю до 2 тис. т/год
υ=1,2 м/с
α = 350-450
α ківшеві 650, 700
Можуть використовуватися в технологічних лініях складання машин, охолодження сортування термічної обробки.
Вони виготовляються 1.2.3.і 4 ланцюгів
За кількістю приводів: одноприводні і багатоприводні
За схемою: горизонтальні, похилі, комбіновані.
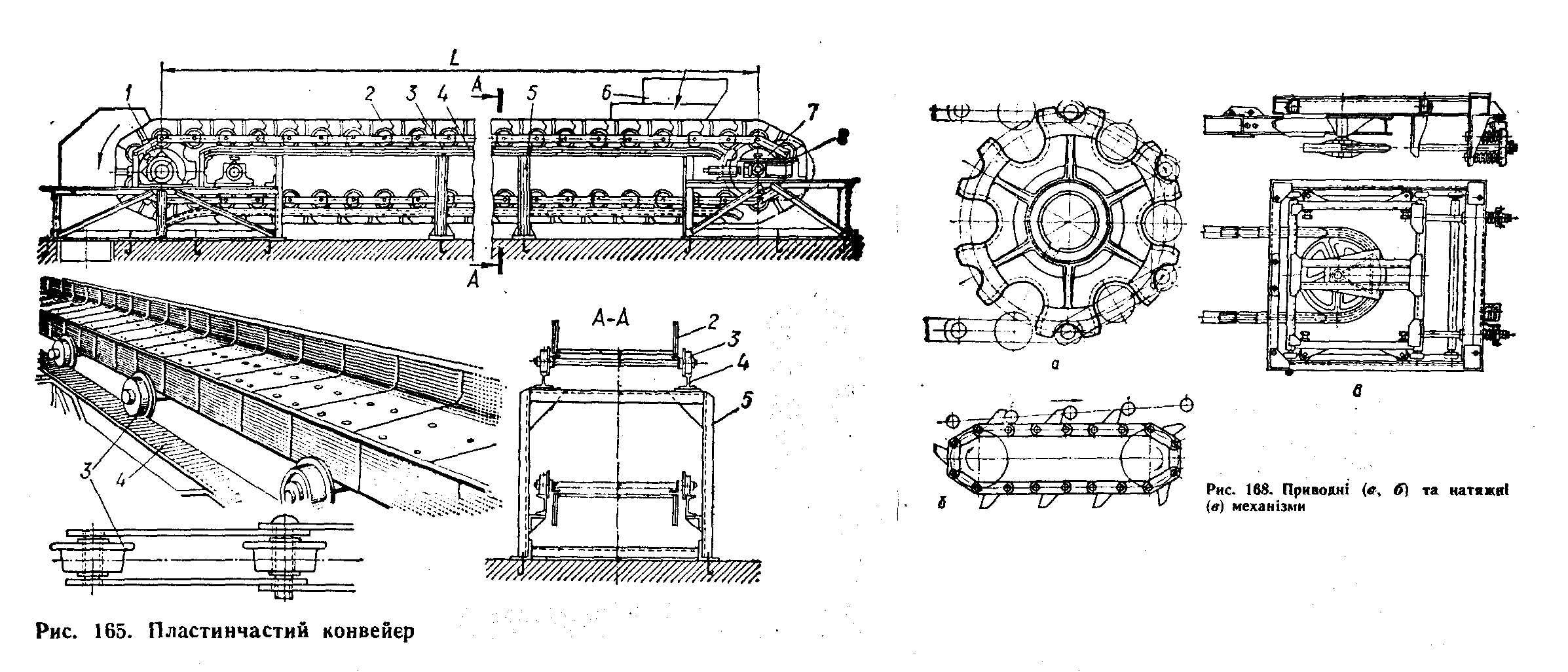
1) приводна зірочка; 2) пластини; 3) катки; 4) напрямні; 5) постав; 6) воронка; 7) натяжна зірочка; 8) натяжний механізм.
В конвеєрах використовують ланцюги.
Використовують ланцюги:
1) прості шарнірні; 2) втулкові роликові (б); 3) катками 3 (в) ребортні; 4) двошарнірні.
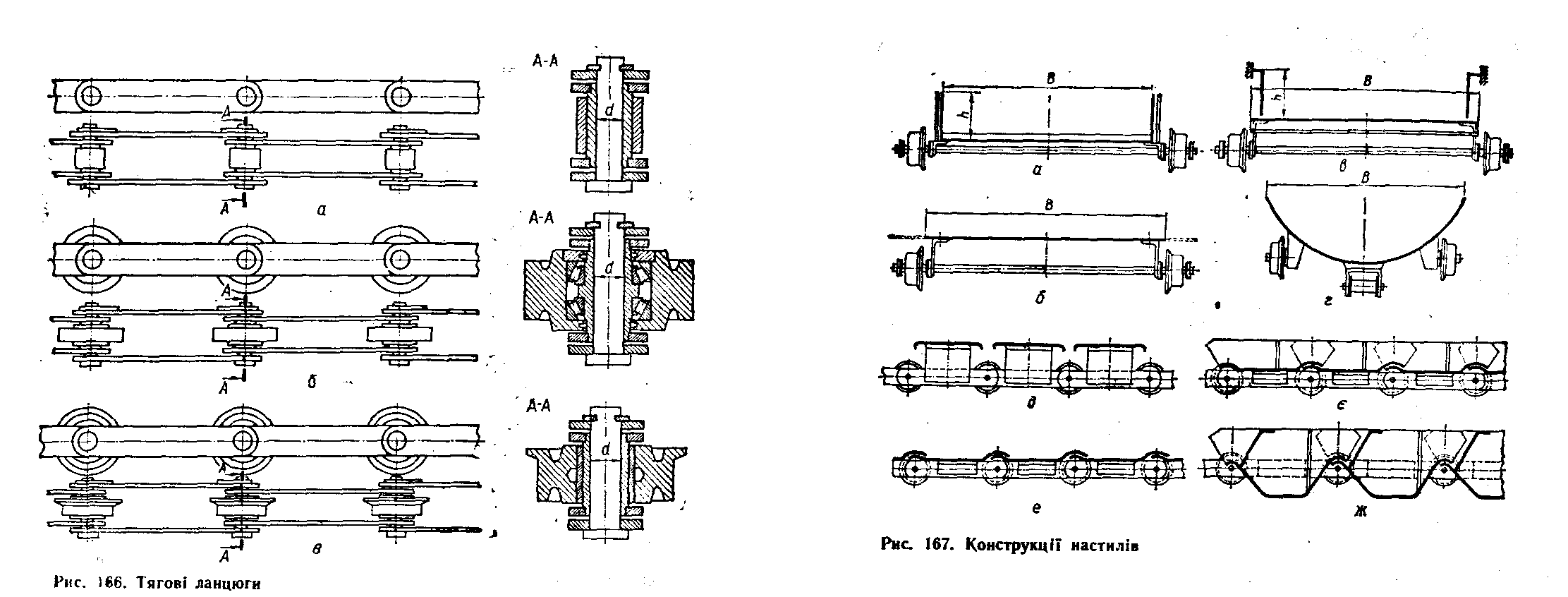
Крок ланцюгів t = 100 – 620 мм
Настил буває без бортів (б); бортовий (а) з бортами рухомими; (в) плоский, з нерухомими бортами; (г) лотковий.
В залежності від форми пластин: д) безбортові плоскі розімкнені; е) безбортові хвилясті; є) бортові хвилясті; ж) коробчасті.
Привод складається: з двигуна, редуктора, зірочок а) приводних; б) натяжних); в) відхідних для них Z = 5…8
Натяжні механізми бувають і гвинтові, і пружинно-гвинтові рис. 168
Хід натяжного механізму S>нм> (1,6…2) t
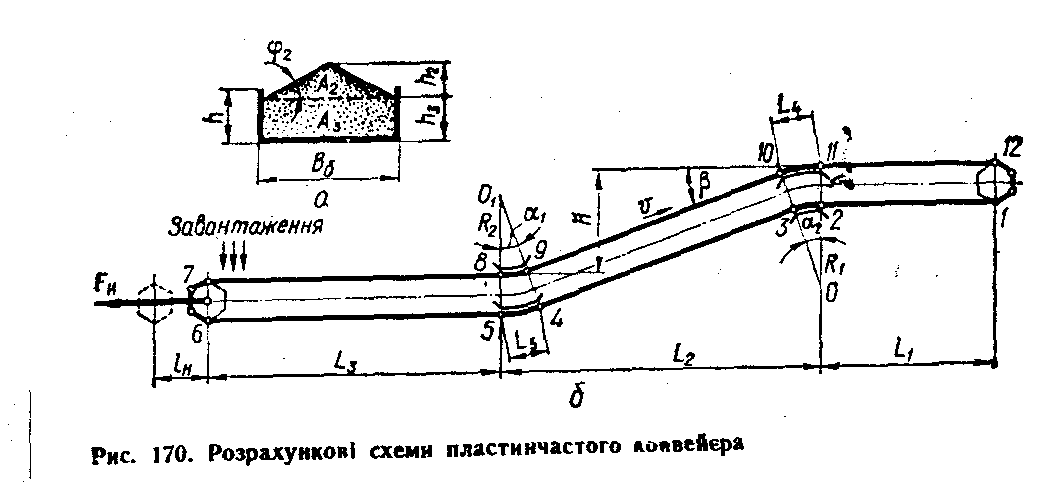
Розрахунок пластинчатих конвеєрів
Визначаємо тип тягового органу;
Обираємо
швидкість руху настилу
 ,
пластинчаті
,
пластинчаті
 зварні круглороликові.
зварні круглороликові.
Ширина
настилу визначається взалежності від
характеру вантажу, площа поперечного
перерізу
 визначається, якщо β
≤300
визначається, якщо β
≤300
На настилі без бортів
На настилі з бортами
А>1 >= А>2>+А>3> = 0,25 В>б> + gU + B>б>hψ
Для крупнокускових
А>2> = 0 і А = В>б>hψ ψ = 0,8…0,9
В>б>
– ширина
настилу

Більш детально Иванченко 327 ст.
Тяговий розрахунок виконують за універсальним методоб обходу контура. При цьому задаються найтяжчим натягом в т. 1
S>min> = S>1> = 1…3 кн
Тягове зусилля на приводних зірочках:
F = S>1>>г> – S>1> (К – 1) (S>1 >+S>1>>г>)
К – коефіцієнт рухливості сипкого матеріалу
|
φ0 |
20 |
25 |
30 |
35 |
40 |
|
К |
0,49 |
0,41 |
0,33 |
0,25 |
0,22 |
Потужність двигуна
N = К>3>Fυ 10-3/η
Руйнівне зусилля на 1 ланцюг

n = 6…10 коефіцієнт запасу міцності ланцюга
К>н> = 1…1,8 коефіцієнт нерівномірності навантаження
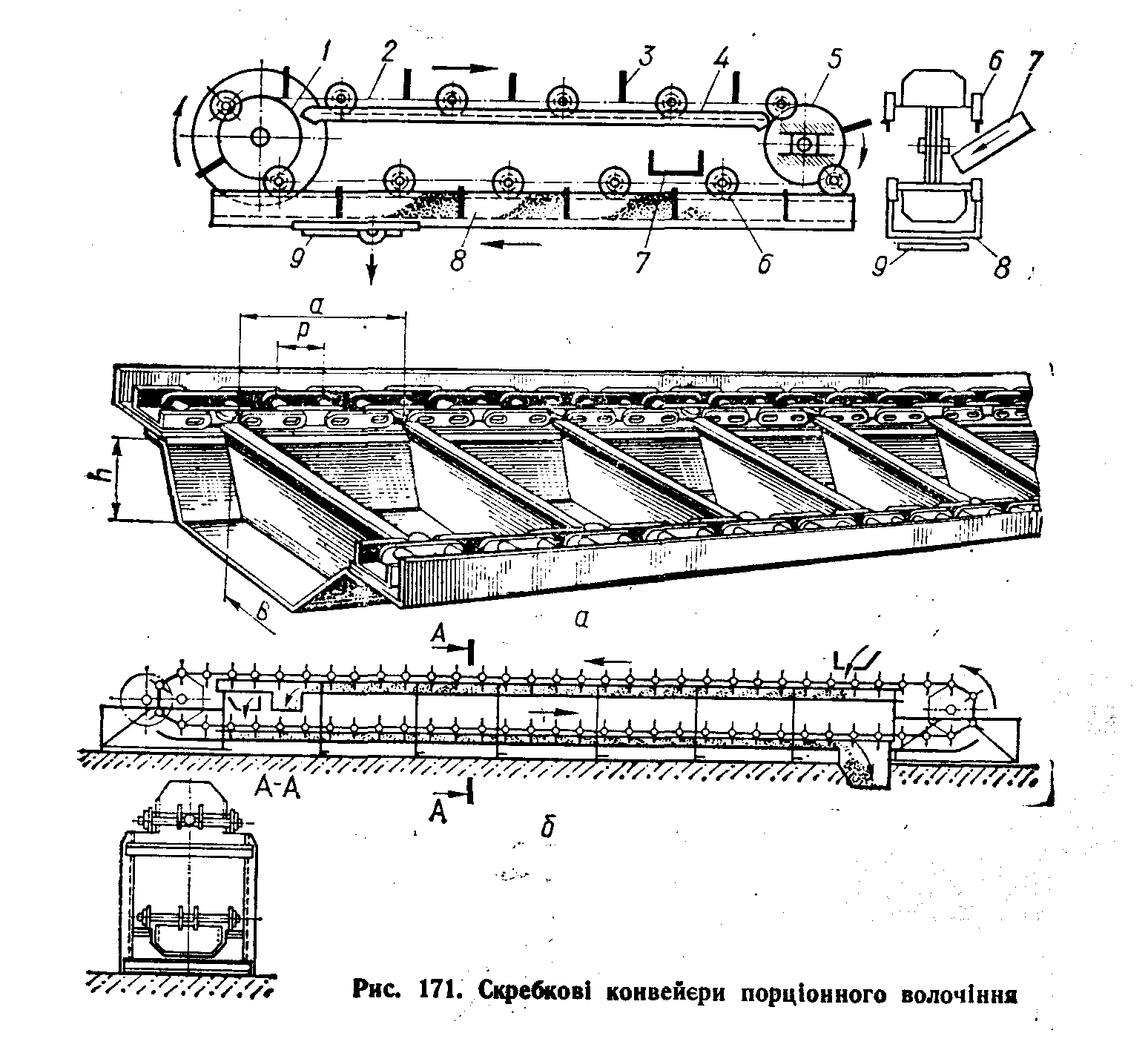
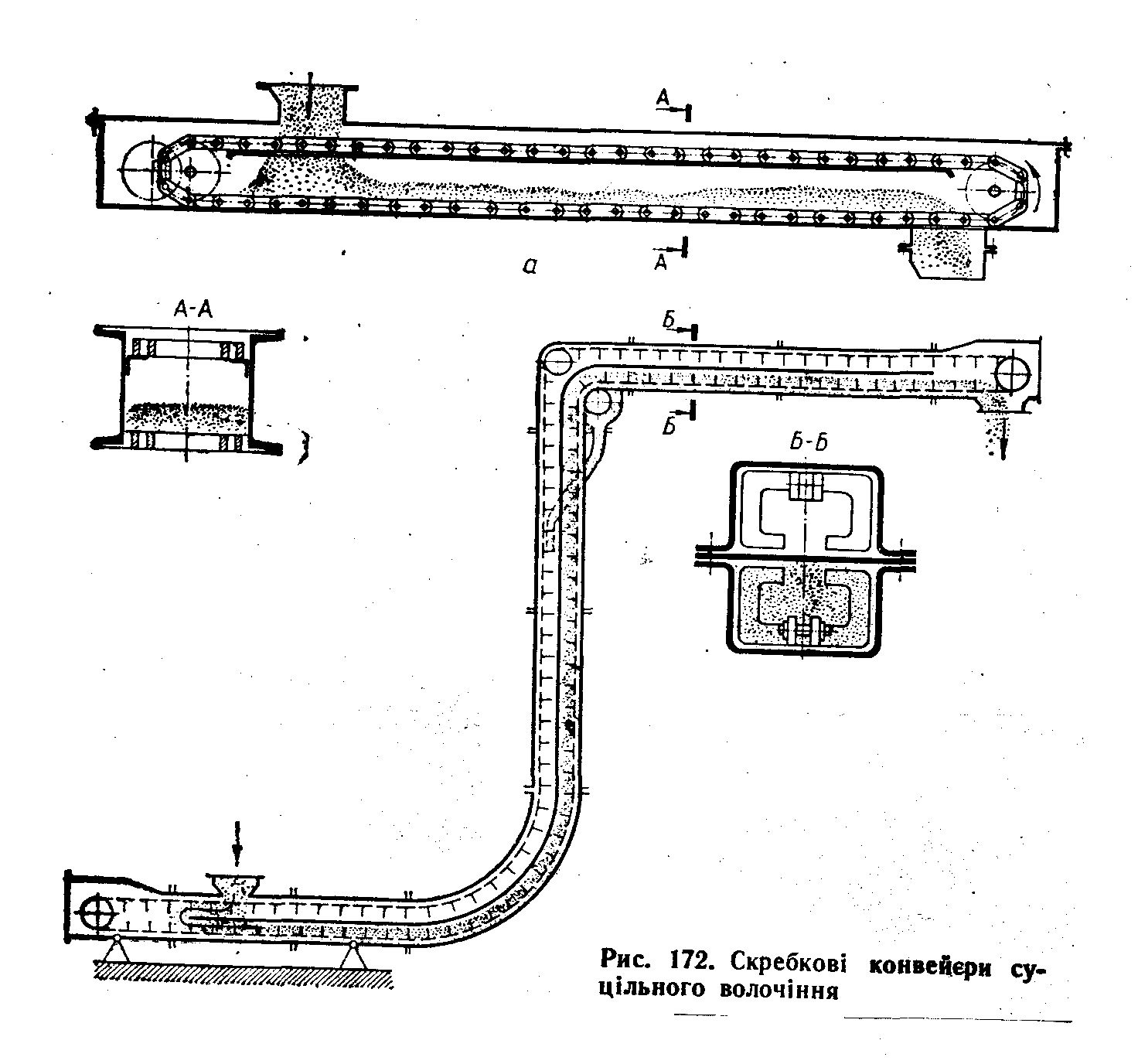
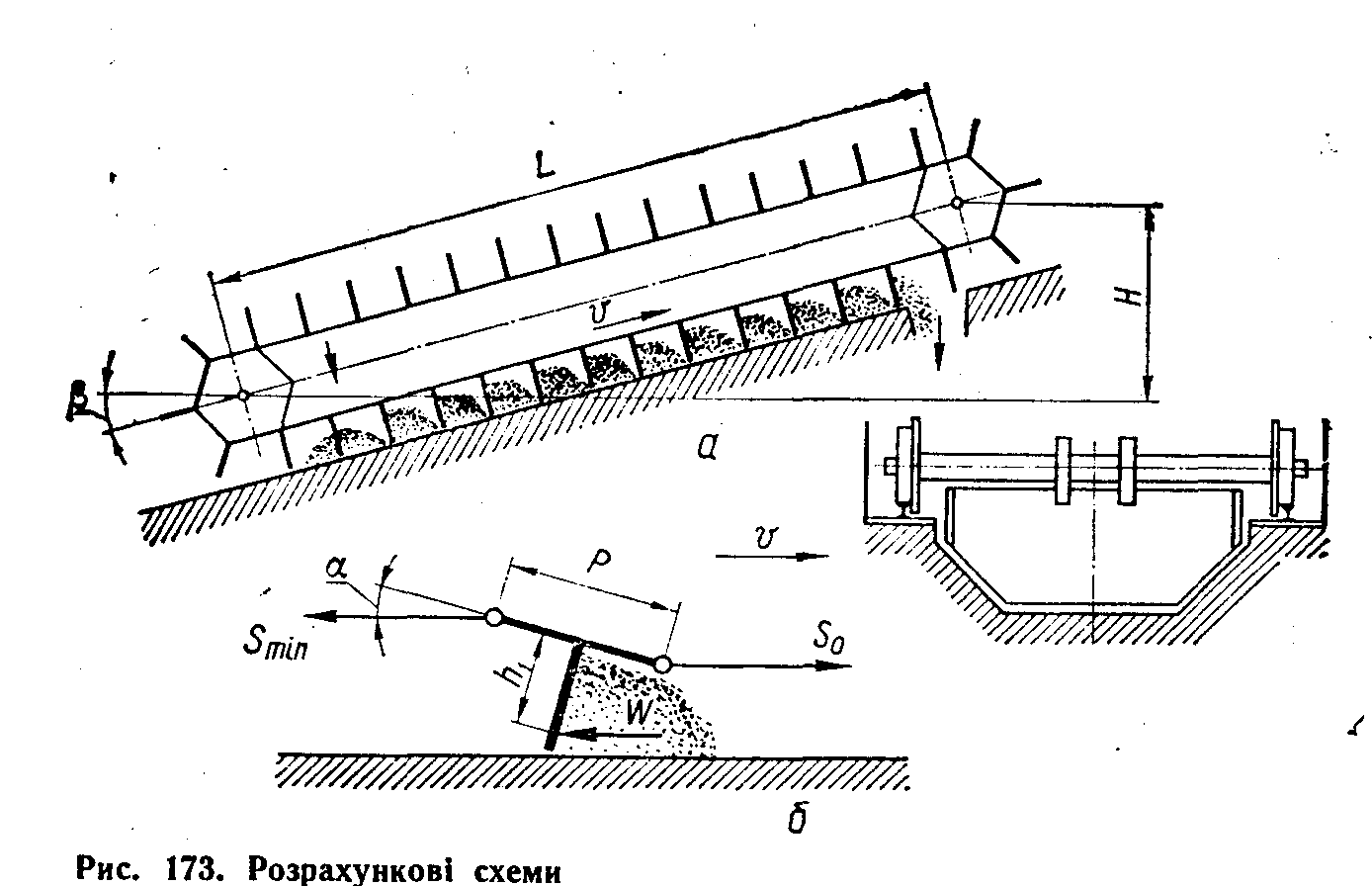
Скрипкові конвеєри
Призначені для транспортування пороховидних, зернистих, кускових, насипних, гарячих матеріалів, а також матеріалів в хімічній, сільськогосподарській, харчовій, металургійній промисловості.
Принцип дії: волочіння вантажу по жолобу.
Вони бувають стаціонарні, пересувні, підвісні і розбіжні. За конструктивним використанням: з однією робочою віткою та двома робочими вітками.
– По формі скрипків: з трапецієвидною і круглою
– По напрямку транспортування:
горизонтальні
похилі
вертикальні
комбіновані
– За способом переміщення:
порційного
суцільного
– За кількістю ланцюгів: 1) одноланцюгові; 2) дволанцюгові
– По контуру: 1) з вертикальним; 2) з горизонтальним замкненням ланцюга.
Будова: 1) ведуча зірочка; 2) ланцюг; 3) екребас; 4) напрямна зірочка; 5) натяжна зірочка; 6) ролик; 7) завантажувальний пристрій; 8) жолоб; 9) люк вивантаження.
Переваги: простота конструкції, простота завантаження і розвантаження.
Недоліки: подрібнення матеріалів, зношування скрибків і жолобків, велика енергоємність.
Тяговим органом є пластинчасті втулочно-коткові ланцюги.
Жолоб може бути металевий, кам’яний бетонний або дерев’яний
Розрахунок
Площа заповнення
А = ВhψК>в> м2/год
В-ширина жолоба
h – висота жолоба
ψ – коефіцієнт заповнення. ψ = 0,05…0,06 сипкі вантажі; ψ = 0,7…0,8 кускові вантажі
К>в >– коефіцієнт, що враховує зменшення об’єму матеріалу перед скрипком при збільшенні кута β. К>в>= 0,55 β=100; К>в>= 0,5 β=400
Продуктивність
П = 3600ВhψК>в>υЅ: т/год

В-ширина шолобу
 ,
м
,
м
Висота скрибка
h>ск> = h + (25…50 мм)
крок скрибка
Р>с> = (2…4) h>ск>
Перевіряємо параметри на відповідність розміру куска
Р>с >≥ 1,5 а>max>
В К>к> а>max>
К>к> – коефіцієнт конструкції конвеєра
К>к>= (3…4) дволанцюгові матеріали сортовані
К>к>= (5…7) одноланцюгові матеріали сортовані
К>к>= (3…3,5) одноланцюгові несортовано
Тяговий розрахунок виконується універсальним методом обходу за контуром опір переміщенню вантажа і робочих органів
W = (qω>ж> + q>1>ω>1>) L cosβ ± (q + q>1>) L sinβ
ω>1> – коефіцієнт опору руху ланцюга з ходовими катками
ω>ж> – коефіцієнт опору руху матеріалу в жолобі

f>ж> – коефіцієнт тертя вантажа по жолобу;
h>ср> – середня висота вантажу;
п>б> – коефіцієнт бокового тиску вантажу
К>б> – коефіцієнт, що залежить від конструкції конвеєра
К>б> = 1 стаціонарні; К>б> = 1,1…1,2 – пересувні
f>1> = 0,3…0,95 коефіцієнт внутрішнього тертя матеріалу.
Мінімальний допустимий натяг, який забезпечує відхилення скрибка на кут α = 2,30 визначається:
h>1> – плече сили
р – крок ланцюга
Визначаємо потужність двигуна

Конвеєри суцільного волочіння і трубчасті див. Иванченка ст. 334–335
Ківшеві конвеєри
Застосовуються для транспортування вантажів по складній замкненій трасі з можливим розвантаженням в декількох пунктах.
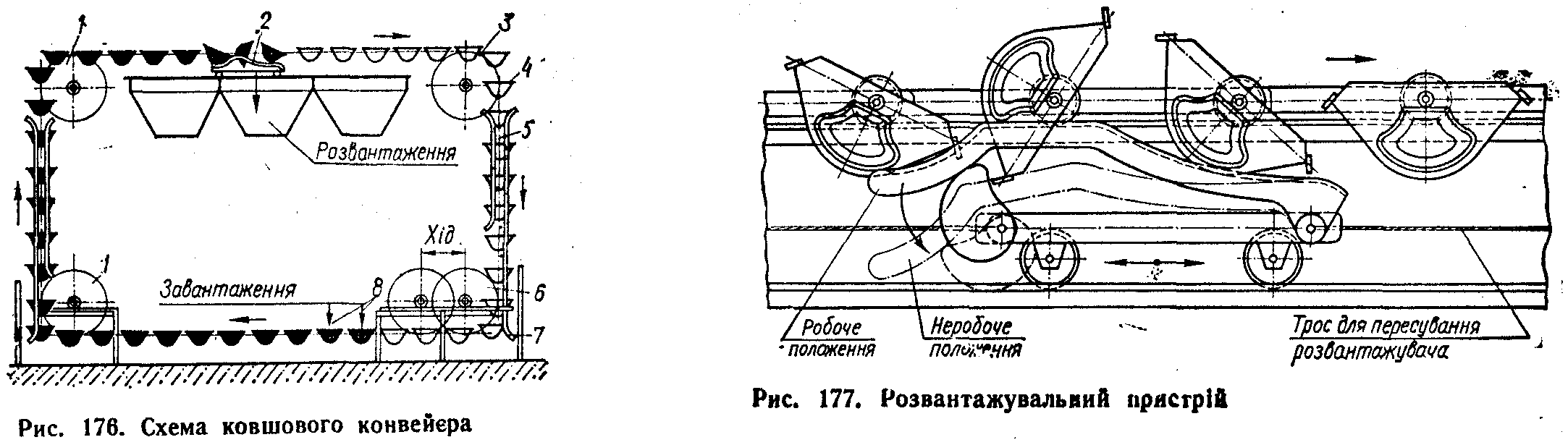
1) натяжна зірочка; 2) розвантажувальний пристрій; 3) приводна зірочка; 4) ковші; 5) ланцюги; 6) натяжний; 7) напрямні; 8) завантажувальний пристрій.
П – до 400 т/год, υ = 0,4 м/с
Переміщають вапняк, кокс, вугілля, цемент
Переваги: безперевантажувальне пересування по складній трасі, нема подрібнення, простота навантаження і розвантаження можливість автоматизації.
Недоліки: велика маса рухаючих частин, висока вартість
Підвісні конвеєри
Використовуються на підприємствах серійного і масового виробництва для безперевантажувального перевантаження вантажів протягом всього циклу. Приводи бувають з зірочками або гусеничні
1) привод; 2) ланцюг; 3) каретки з підвісками; 4) замкнута колія;
5) натяжний механізм.
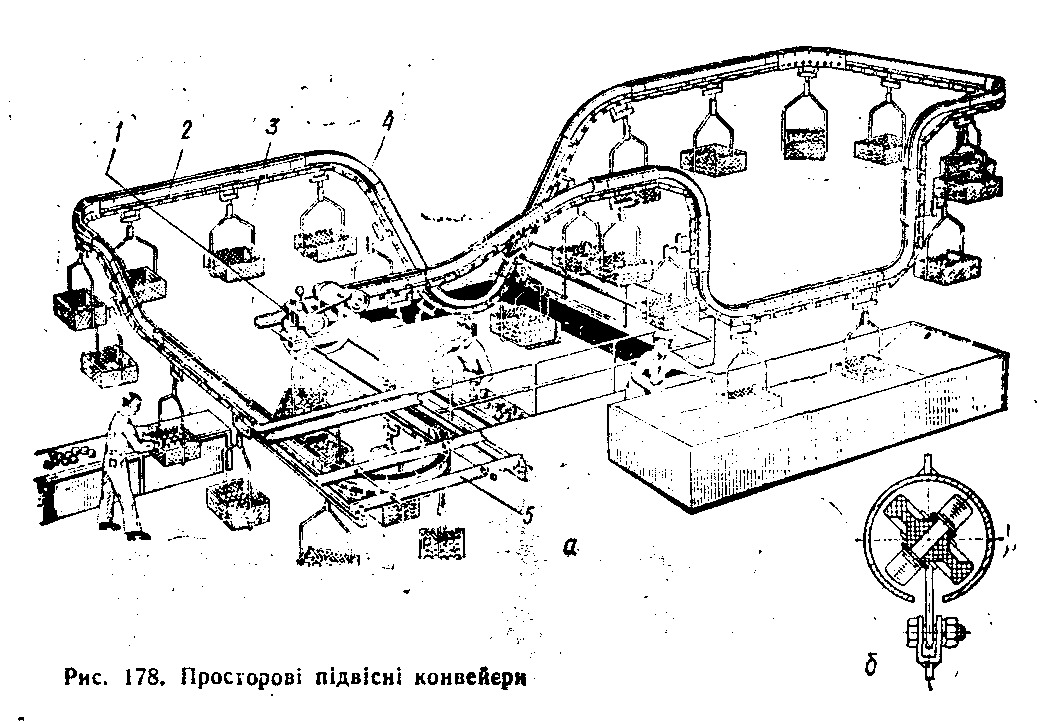
Підвісні конвеєри залежно від способу руху поділяють на вантажотягнучі (рис. 179 а), вантажоштовхаючі (рис. 179 б) і вантажоведучі (рис. 179 в).
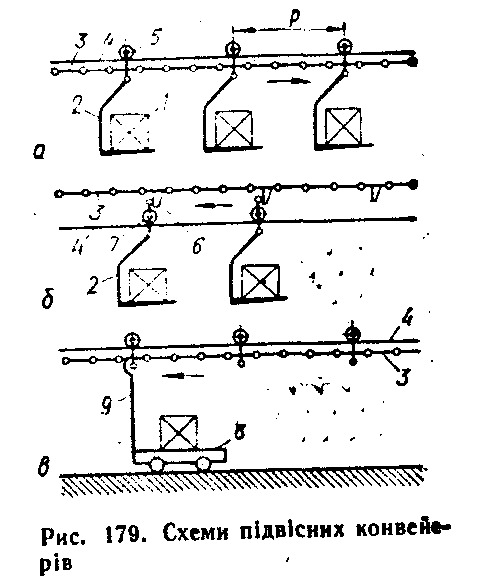
1) вантаж; 2) підвіска; 3) ланцюг; 4) підвісна колія; 5) каретки; 6) упор; 7) каретки; 8) візок; 9) штанги
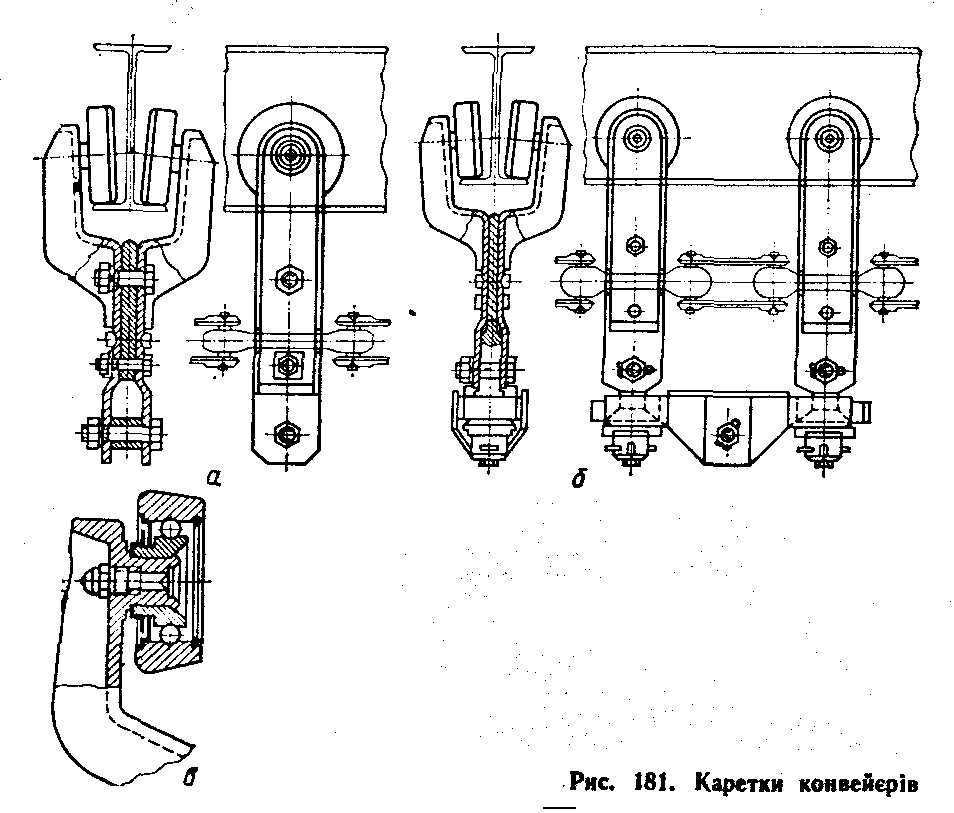
Каретки бувають одинарні і спарені (рис. 181)
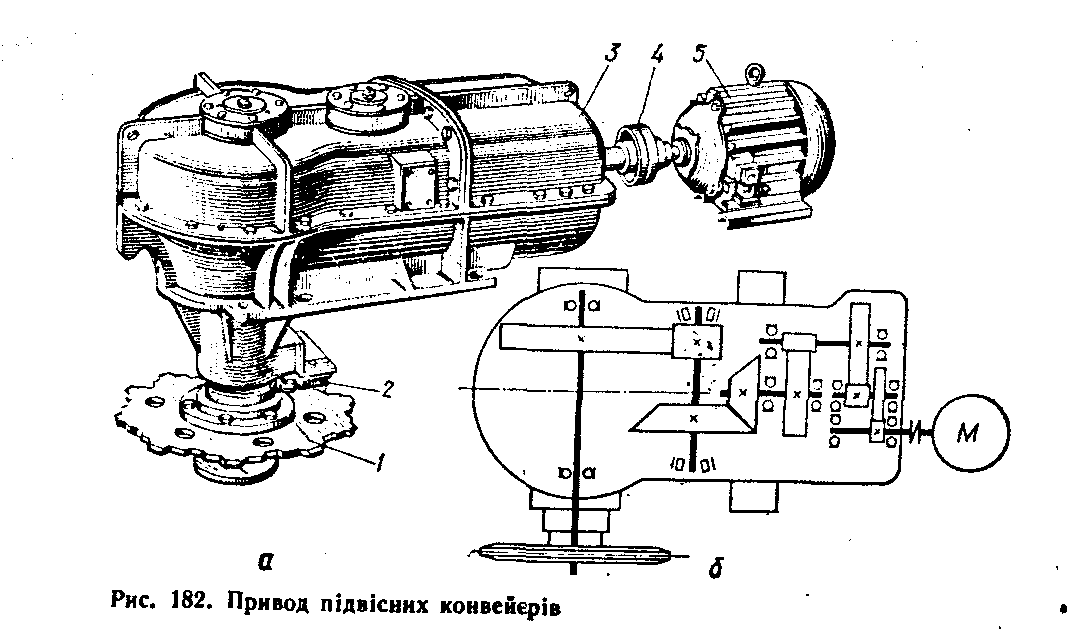
Приводи бувають: кутові і гусеничні (рис. 182)
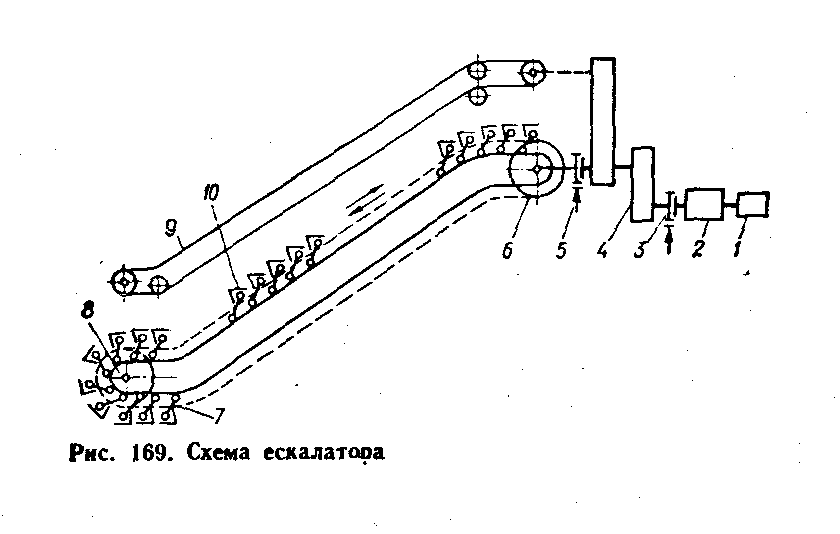
Елеватори
Елеваторами називають машини безперервної дії для вертикального або крутопохилого (більше 600) переміщення насипних або поштучних вантажів.
Класифікація
Елеватори класифікують за ознаками:
– За типом робочого органу:
ківшеві
поличні
колискові
– За типом тягового органу:
стрічкові
ланцюгові
– За кутом встановлення:
вертикальні
похилі
– За швидкістю руху ковшів:
тихохідні до 1,25 м/с
швидкохідні до 4 м/с
спеціальні до 7 м/с
– За розміщенням ковшів
з розставленими ковшами
з зімкнутими ковшами
Технічні показники
Продуктивність до 600м3/год
Висота підйому – до 60 м

Переваги: невеликі габаритні розміри в перерізі і плані, велика висота підйому, простота і можливість герметизації.
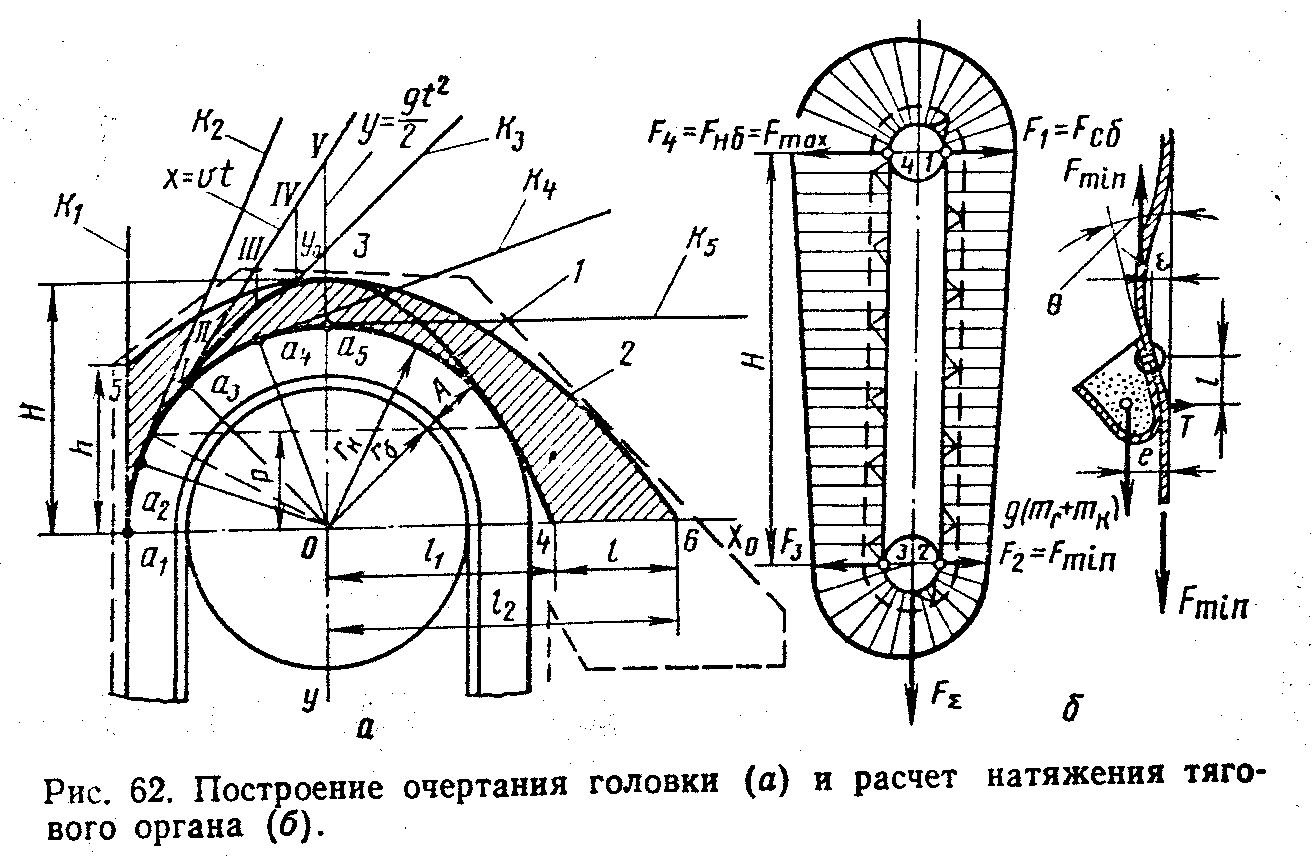
Умовами роботи елеватора є правильний вибір параметрів ковшів, швидкості руху, розміру барабанів і зірочок, форми і розмірів верхньої і нижньої (башмак) частин елеватора.
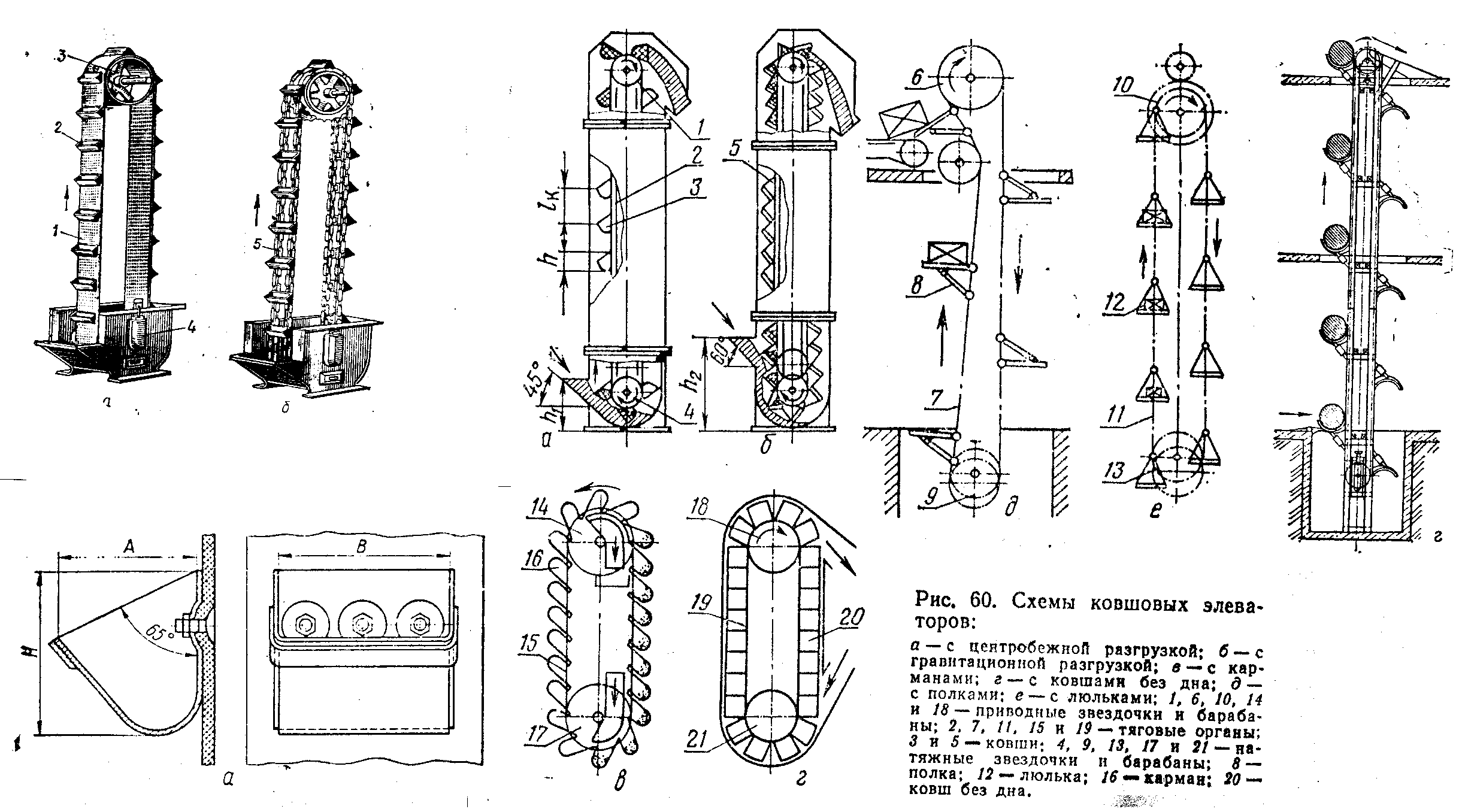
У вертикальних елеваторах використовуються ковші: 1) глибокі; 2) а. з циліндричним днищем для сипких сухих вантажів, б. гострокутові в. скруглені для важких абразивних вантажів, г) спеціальні для великих швидкостей. Мілкі з циліндричним днищем для вологих малосипких вантажів.
Параметри ковшів
Ємкість від 0,2 до 45 літрів (до 130 л), ширина від 0,1 м до 1 м. Ø приводного барабана стрічкового елеватора.
Д>б> = (1,25…150)і і – кількість прокладок
Завантаження і розвантаження елеваторів
Сухі, дрібні, пороховидні, зернисті матеріали завантажуються зебперервним потоком (швидкість подачі ковшів до 1 м/с). Продуктивність елеватора залежить від способу розвантаження.
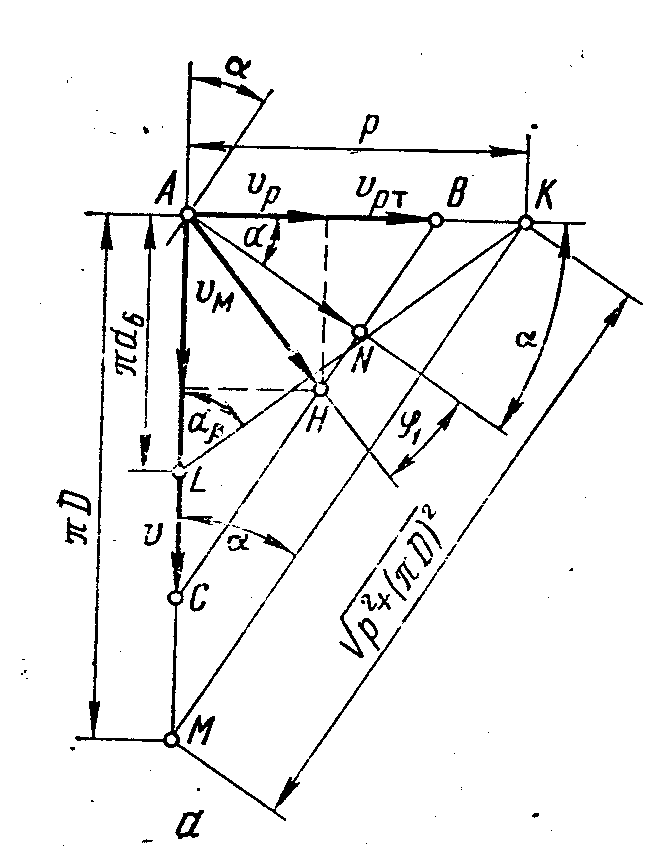
Розвантаження буває відцентрове (137 а), самопливне вільне, самопливне спрямоване відцентрове розвантаження використовується для дрібносипких матеріалів.
Самопливне вимагає відхиляючих роликів і швидкості руху ковшів 0,6–08 м/с (для поганосипких навантаження у ковші на прямолінійній ділянці діє сила вати mg), а на криволінійній ділянці додається відцентрова сила.
 і рівнодійна
і рівнодійна

Змінюється за модулем і напрямом але в любому відрізку напрям сили F перетинається з вертикаллю, яка проходить через центр барабану в одній і тій самій точці е, яка називається полюсом подібності.
∆ОАС±∆FF>в4>А маємо
 звідки
звідки 
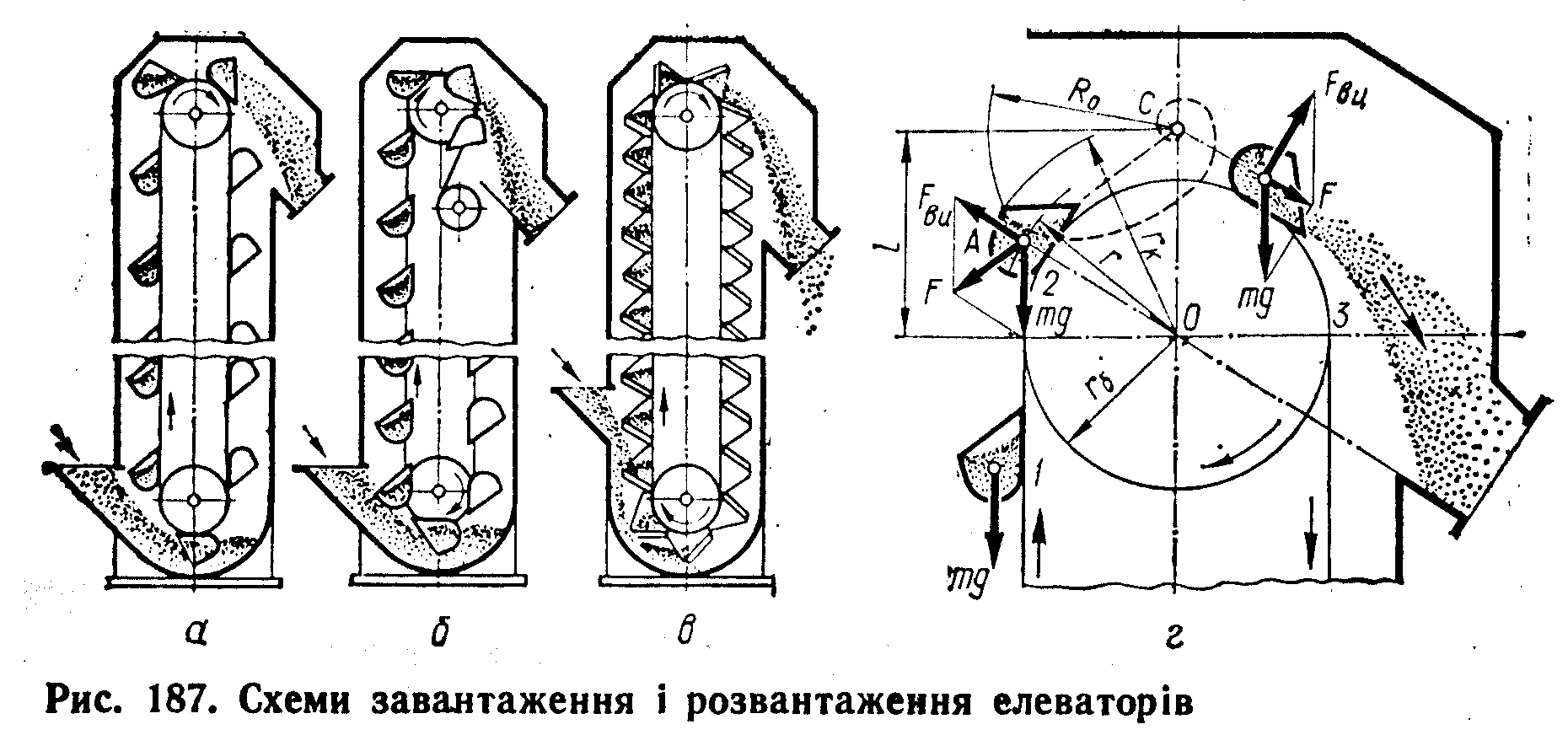
Із збільшенням l швидкість зменшується, при цьому зменшується відцентрова сила, що діє на барабан l ≤r>б>
Відцентрова сила F>б4>>>mg, що є умовою відцентрового розвантаження при l = r>к>. mg значно більша F>б4> розвантаження самоплинне при r>б><l<r>к >– розвантаження змішане.
Вантаж у ковші розміщується під кутом природного укосу до паралелі, проведеної до лінії АС і його вільна поверхня є логарифмічною спіраллю рівняння якої

Де R – змінний радіус вектор;
R>0> – початковий радіус;
φ – змінний полярний кут;
t>1> – коефіцієнт внутрішнього тертя матеріалу.
Логарифмічна спіраль визначає ту частину вантажу, яка залишиться в спіралі (відсічена спіраллю).
При
відцентрованому розвантаженні, коли
 ≤
1
≤
1
Ø>бор> = 0,204υ2
При
самопливному розвантаженні
>3
Ø>бор> = 0,6υ2
Вибір основних параметрів елеватора
Продуктивність
П
= 3,6 т/год
т/год
і>к> – ємність ковша;
р – крок ковша;
υ – швидкість;
ρ – густина;
ψ – коефіцієнт заповнення.
За заданою продуктивністю визначаємо лінійну місткість ковшів.
Параметри ковша перевіряємо на відповідність максимальному куску
А = КQ>max>
К = 2…2,5 для рядових вантажів, К = 4…5 для сортованих сипких.
Тяговий розрахунок виконується методом обхода контура визначивши натяги стрічки S>зб> і S>нб> в точках 1.4 з урахуванням опору зачерпування ковшами.
F>заг> = П(К>1>υ>2> + К>2>)
К>1> і К>2> – коефіцієнти, які залежать від крупності кусків матеріалу
К>1> = 1,5…3
К>2> = 1,5…3 Для кусків малої і середньої крупності
К>1> = 0,2…1,2
К>2> = 1…2 Для зернистих матеріалів
Тягове зусилля на приводному барабані або зірочці
F>0> = S>нб> – S>зб> (К' – 1) (S>нб> – S>зб>)
К' – коефіцієнт, що враховує опір обертанню приводного барабана або зірочки.
Статична потужність двигуна

К>3> – коефіцієнт запасу
В подальшому визначається потужність з урахуванням динамічних навантажень і гальмівний момент привода, який виключає зворотній рух довантажувального елеватора. Иванченко 5.13…5.14
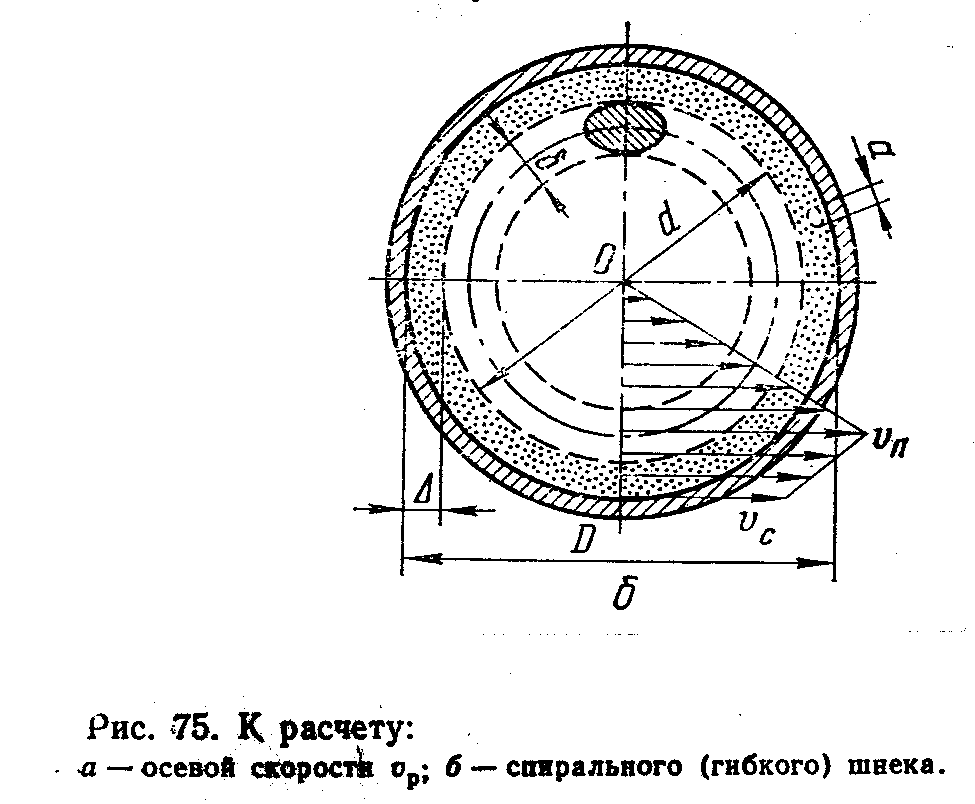
Гвинтові конвеєри
Застосовуються на невеликі відстані пороховидних, зернистих, тістоподібних і в’язких матеріалів в горизонтальному, похилому або вертикальному напрямках.
Переваги: простота конструкції, невеликі розміри, просте обслуговування, герметичність.
Недоліки: підвищена енергоємкість, подрібнення матеріалу, мала довжина транспортування на один привод, невелика продуктивність.
Будова
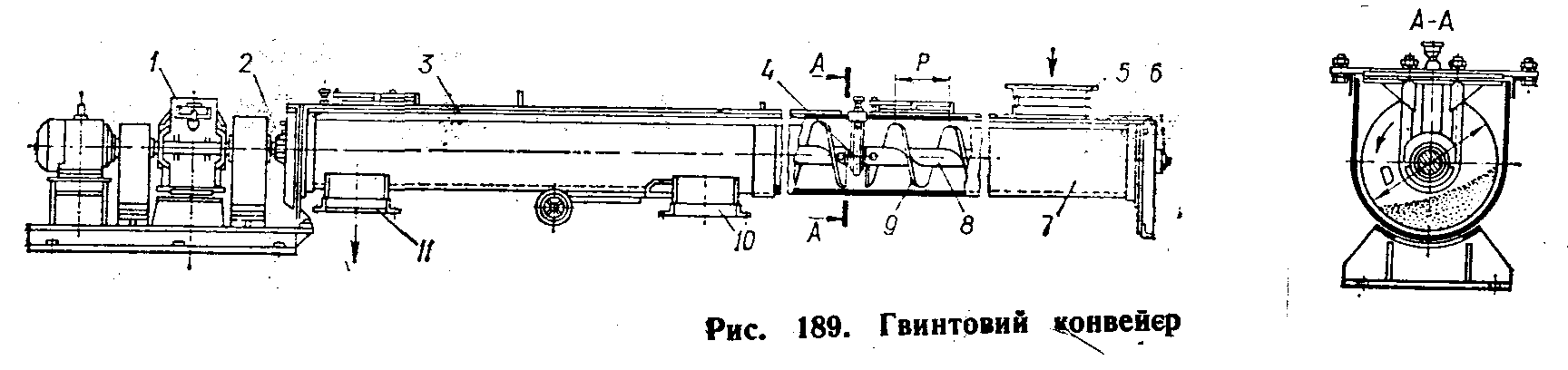
1) редуктор; 2) опори; 3) кришка; 4) проміжки; 5) завантажувальний отвір; 6) опори; 7) жолоби; 8) вал; 9) спіраль; 10,11) розвантажувальні воронки.
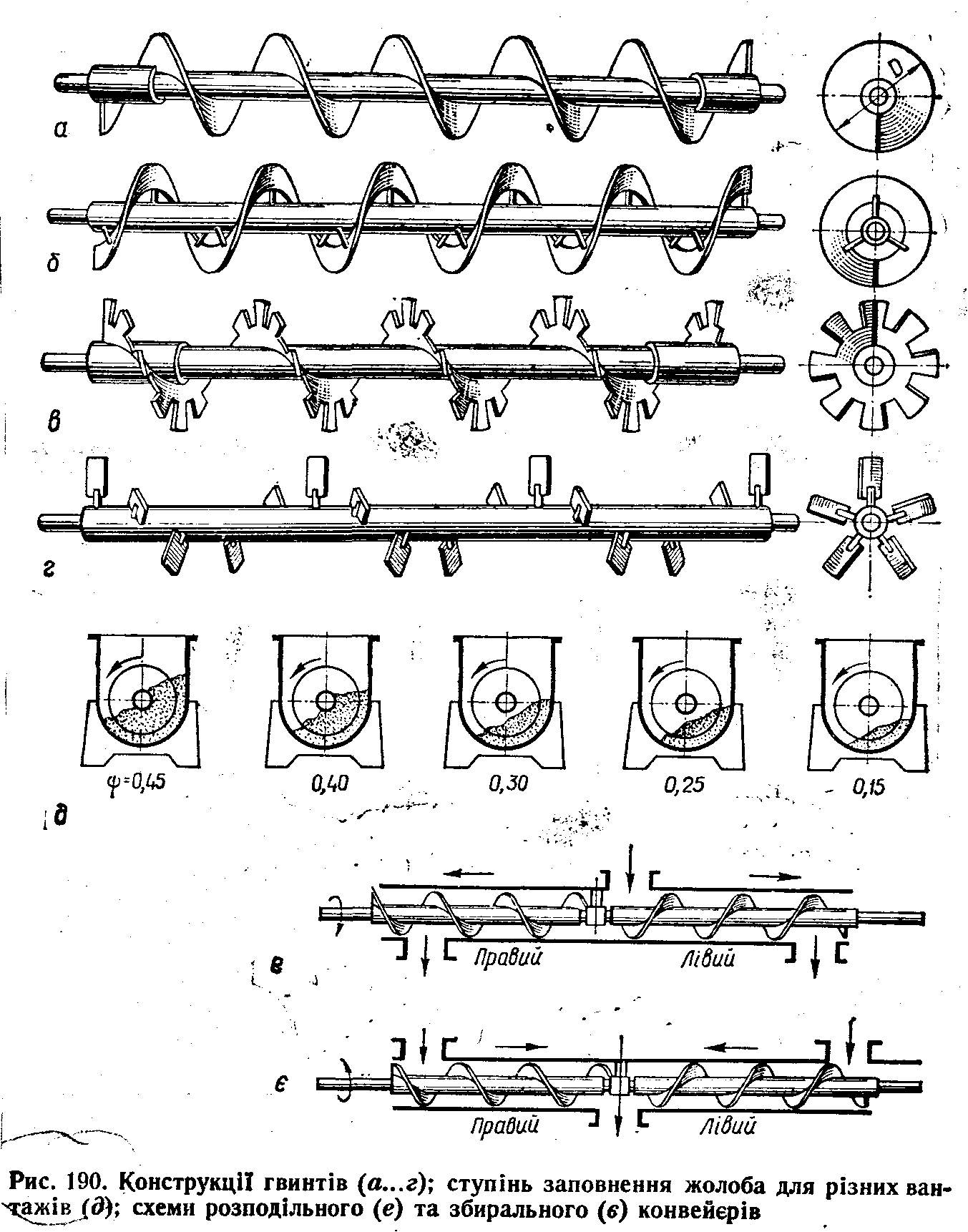
– За кількістю спіралей гвинти бувають: 1, 2, 3-західні, праві і ліві.
Гвинти бувають: а) суцільні; б) стрічкові; в) фасонні; г) лопатеві
Ø гвинта 100–300 мм
Продуктивність
П
= 3600
υ – швидкість пересування матеріалу;
ψ – коефіцієнт заповнення
ρ – густина матеріалу
С>в> – коефіцієнт зменшення продуктивності похилого конвеєра залежно від кута нахилу.
-

0
8
10
18
20
С>в>
1
0,9
0,8
0,7
0,6
Швидкість переміщення вантажу

р – крок;
n>2> – частота обертання гвинта
Для термальної роботи конвеєра
n>2>=
К = 65…60 – для легких, неабразивних матеріалів;
К = 45 – важкі неабразивні;
К = 30 – важкі абразивні;
n>2> – до 150 легких сипких до 100 кускових, до 50 – важкі і тістоподібні
П = 47D3EnρC>в>
D ≥ (10…12) α>max> – сортований вантаж
D ≥ (4…6) α>max> – рядового, сипкового.
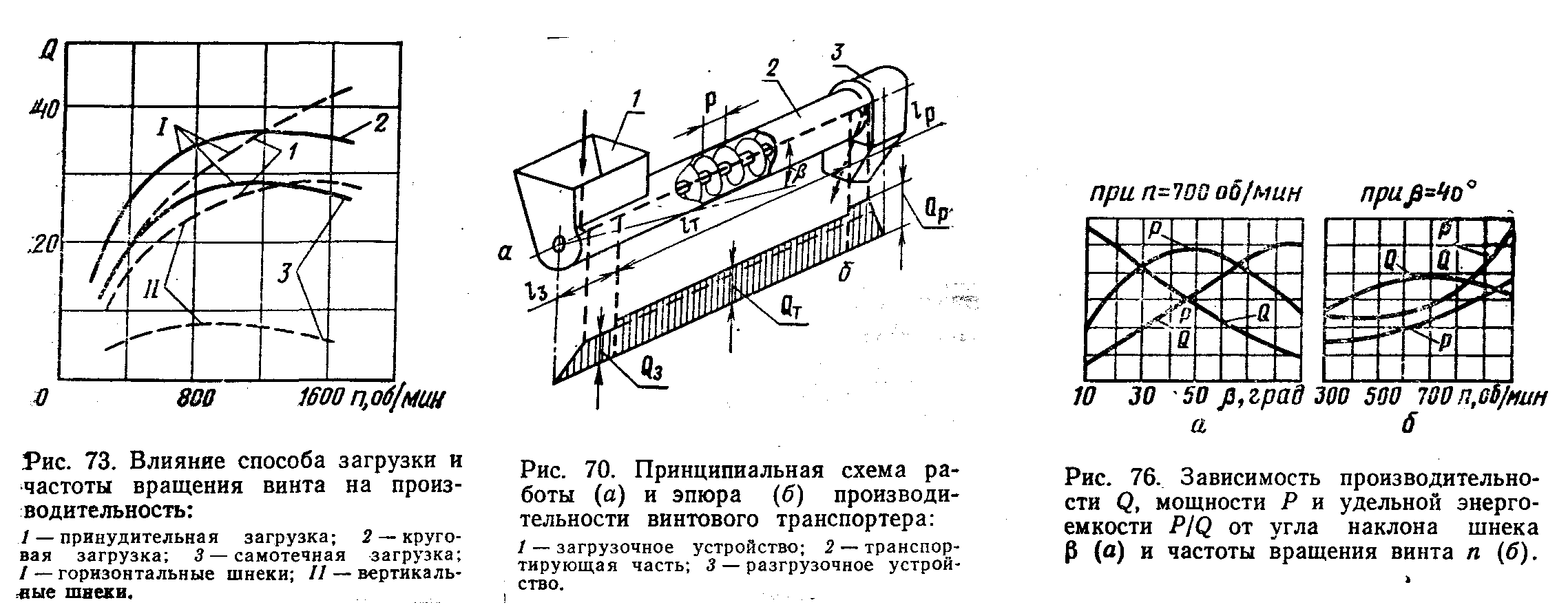
Потужність
Р
=
L>г> – горизонтальна проекція;
К>з> – коефіцієнт запасу;
ω>0> – коефіцієнт опору руху. ω>0> = 4 важкі абразивні матеріали; ω>0> = 2,5 сіль, вугілля; ω>0> = 1,2…1,6 липкі, насипні матеріали.
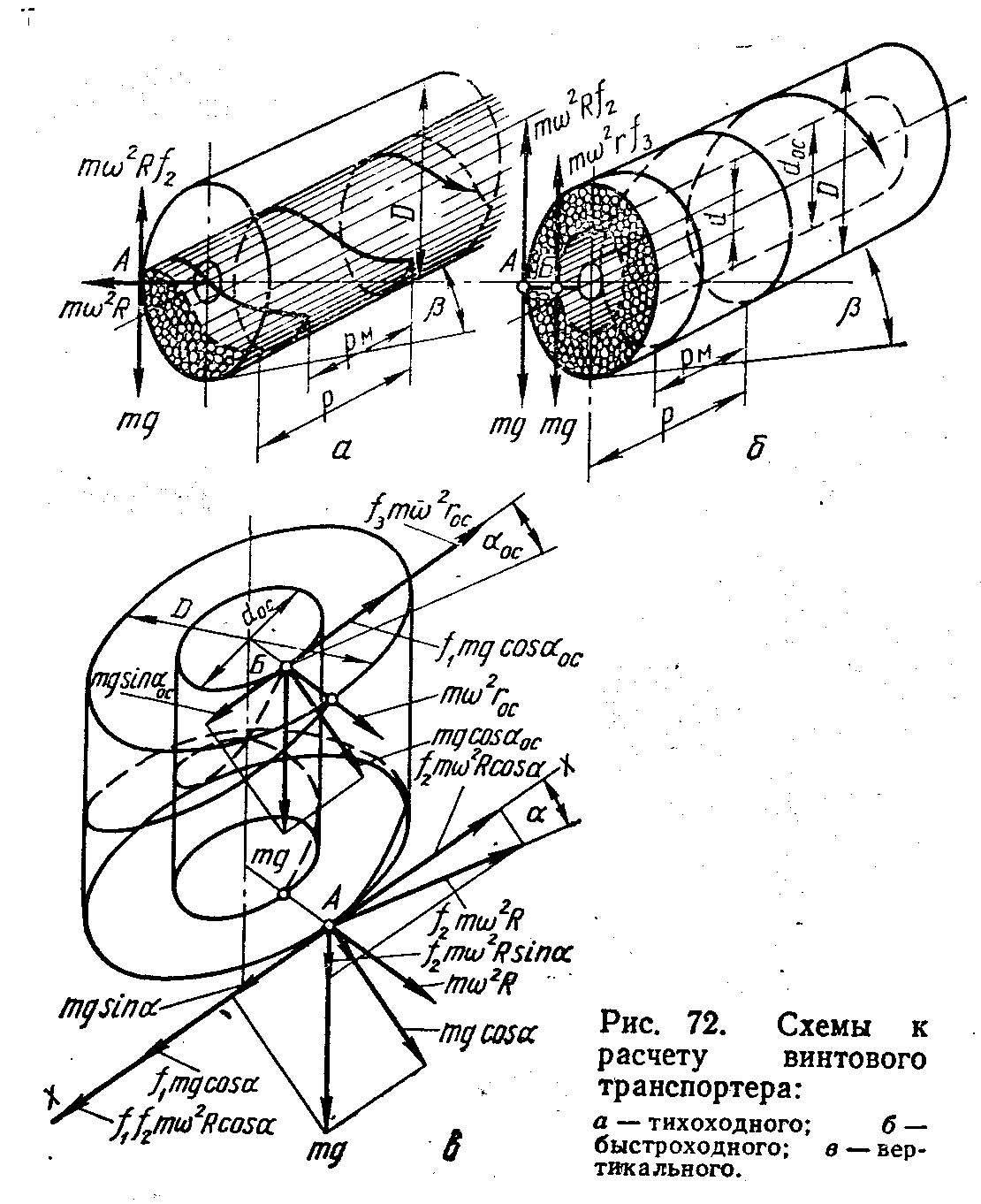
Опори переміщення
– Зусилля на горизонтальне переміщення
W>1> = qLr sinβ
– Сила тертя матеріал-жолоб
W>2> = qLf>ж> cosβ
– Сила тертя гвинт-жолоб
W>3>
=(W>1>
+W>2>)
f>г>
– Сила моменту тертя в підвісних підшипниках
W>4> =К>4>LD3/p К>4> = 1500 н/м3
– Зусилля від моменту в упорних підшипниках
W>5>
= (W>1>+W>2>)
– Сила від внутрішнього тертя в матеріалі
W>6> = (1-К>2>) qLnDf/p К>2> = (0,6…0,7) враховує реальну швидкість
– Потужність двигуна
P
=
 К>3>
= 1,15–1,25
К>3>
= 1,15–1,25
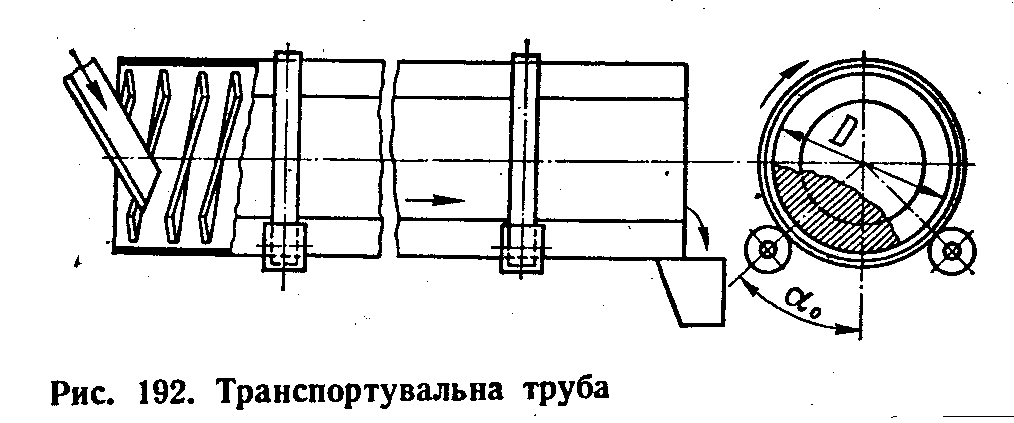
Довжина до 250 м
Застосовується як технологічне обладнання
Переваги: суміщення технологічних і транспортних операцій, висока продуктивність, герметичність, простота та надійність.
Недоліки: великі габарити, підвищена енергоємкість, невеликий строк служби.
Продуктивність
П
= 3600 ,
ψ
= 0,2…0,3. D
– внутрішній
діаметр труби.
,
ψ
= 0,2…0,3. D
– внутрішній
діаметр труби.
Частота обертання
n
=
 ;
D>1>
–
зовнішній діаметр
;
D>1>
–
зовнішній діаметр
Швидкість переміщення
υ= ;
р
= 0,5D
;
р
= 0,5D
ω – кутова швидкість
– Обертальний момент
M>1> = RZ>p>D>б>ω
D>б> – діаметр бандажа;
Z>p> – кількість роликових опор;
R – реакція на ролику;
G – G>0> – силові та вантажні труби,
– Моменти сил тертя
M>2>
=

F>т> = Gfв cosαв
– Потужність двигуна
Р
= (М>1>
+ М>2>)ω
±
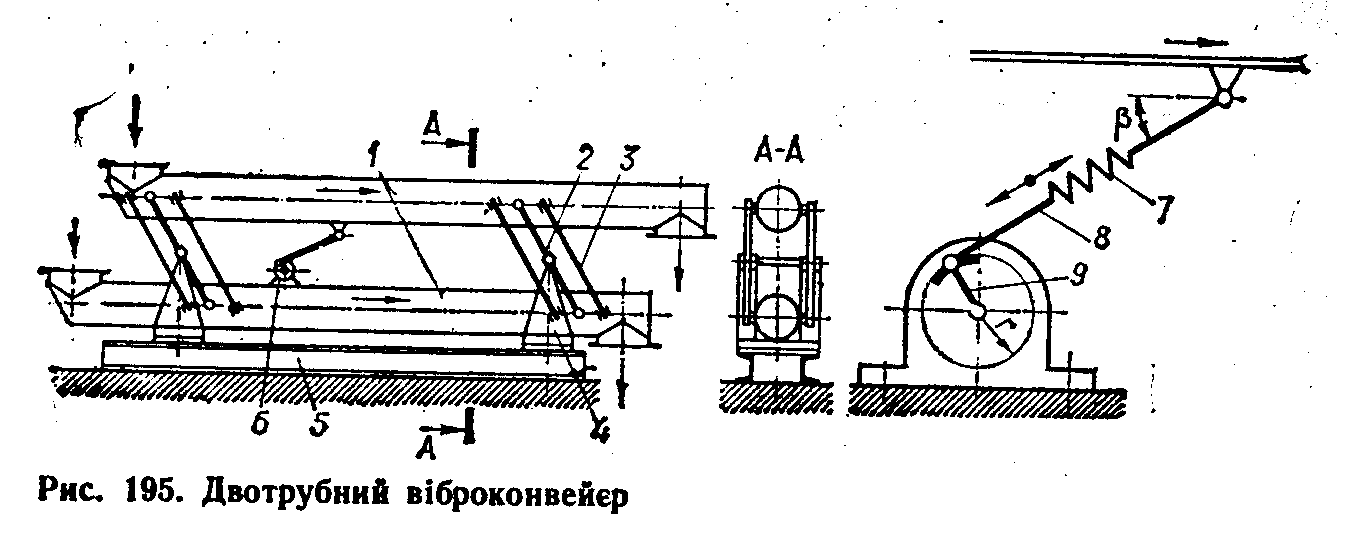
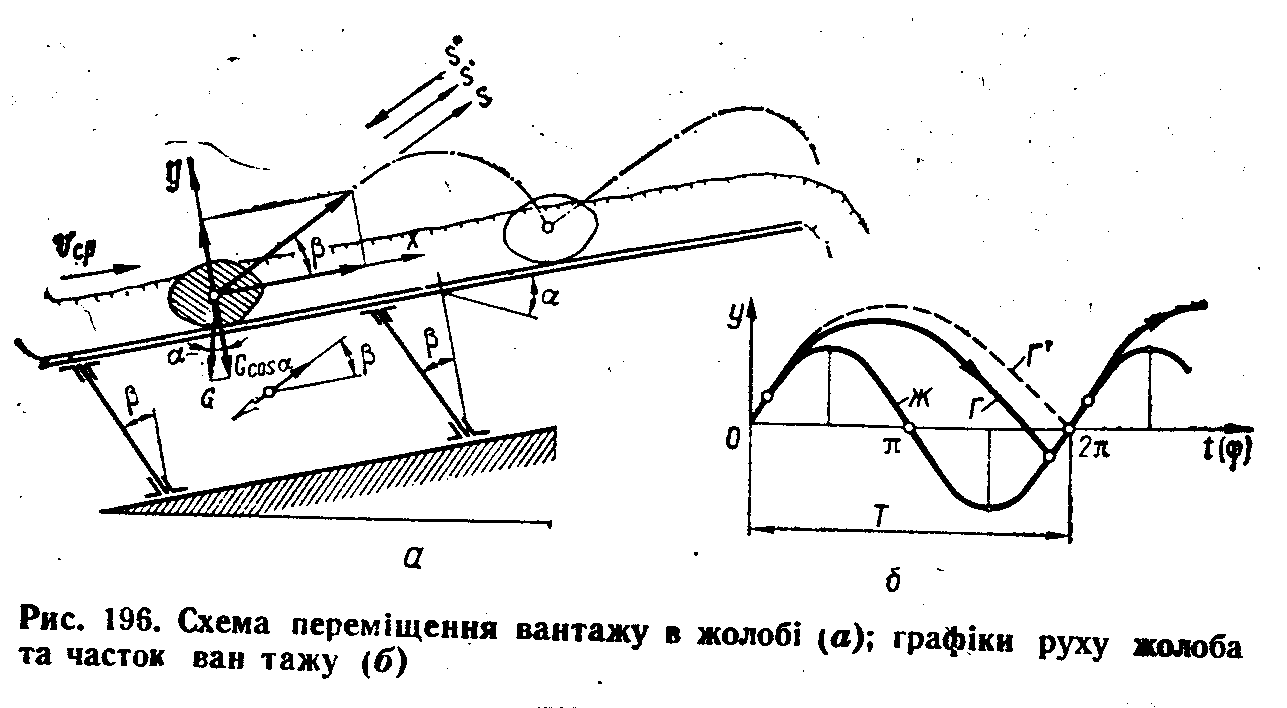
Інерційні конвеєри
Вони бувають, вібраційні, хитні, нетальні машини
У віброконвеєрах чистота коливань 450–3000 коливань/хв. Амплітуда – 10–150 мм.
Використовується у хімічній промисловості в виробництві будівельних матеріалів.
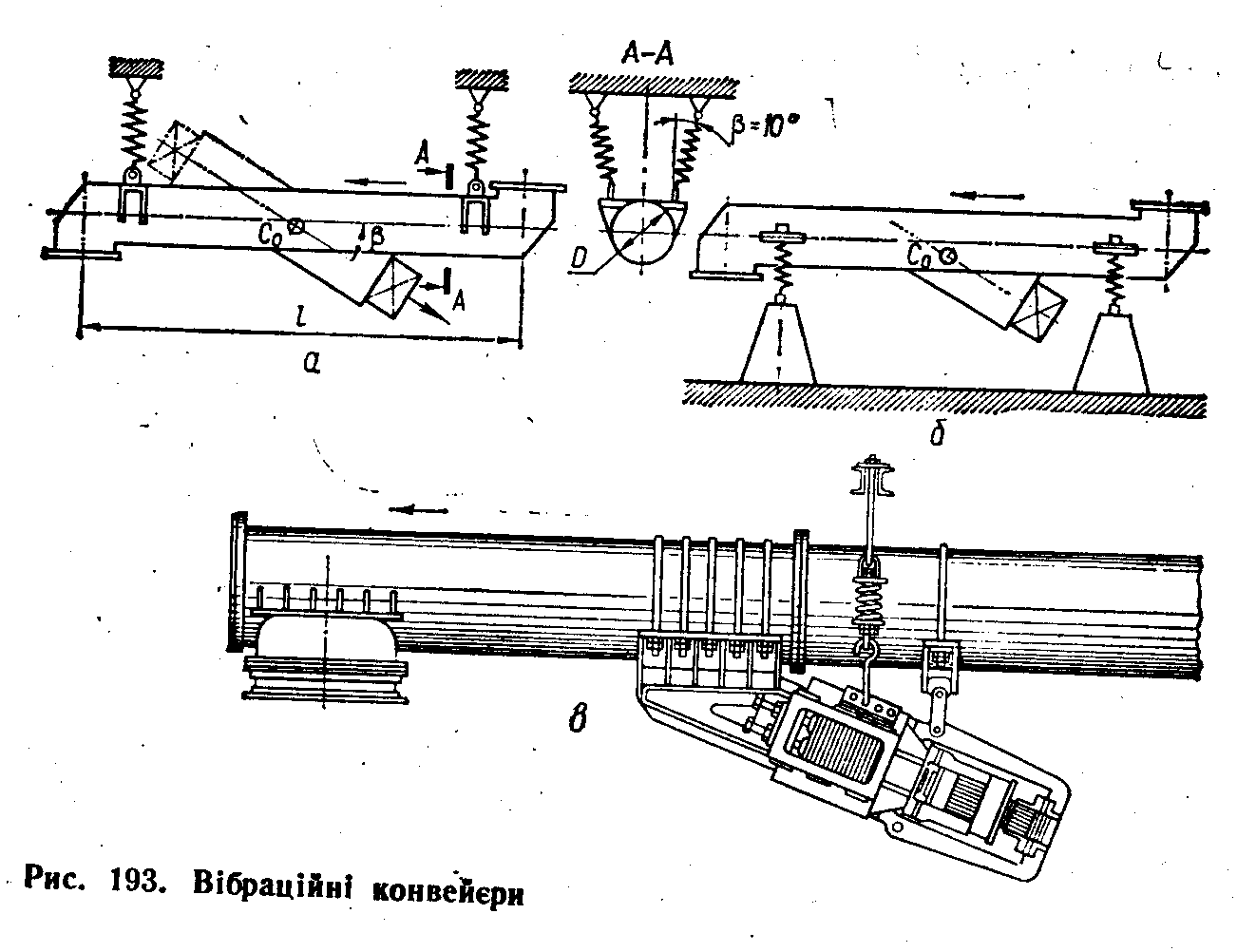
Переваги: мале спрацювання, мала енергоємкість, можливість врівнювання системи, герметичність.
Конвеєри бувають горизонтальні, похилі, вертикальні.
Продуктивність до 400 м3/год
L>г> – до 100 м; υ>max> 0,6 м/с кускові, 0,2 м/с порошковидні.
– По конструкції підвіски
на підвісці
на опорах
Особливість конструкції – наявність амортизаторів
В якості привода використовуються вібратори:
інерційні
ексцентри
електромагнітні
поршневі
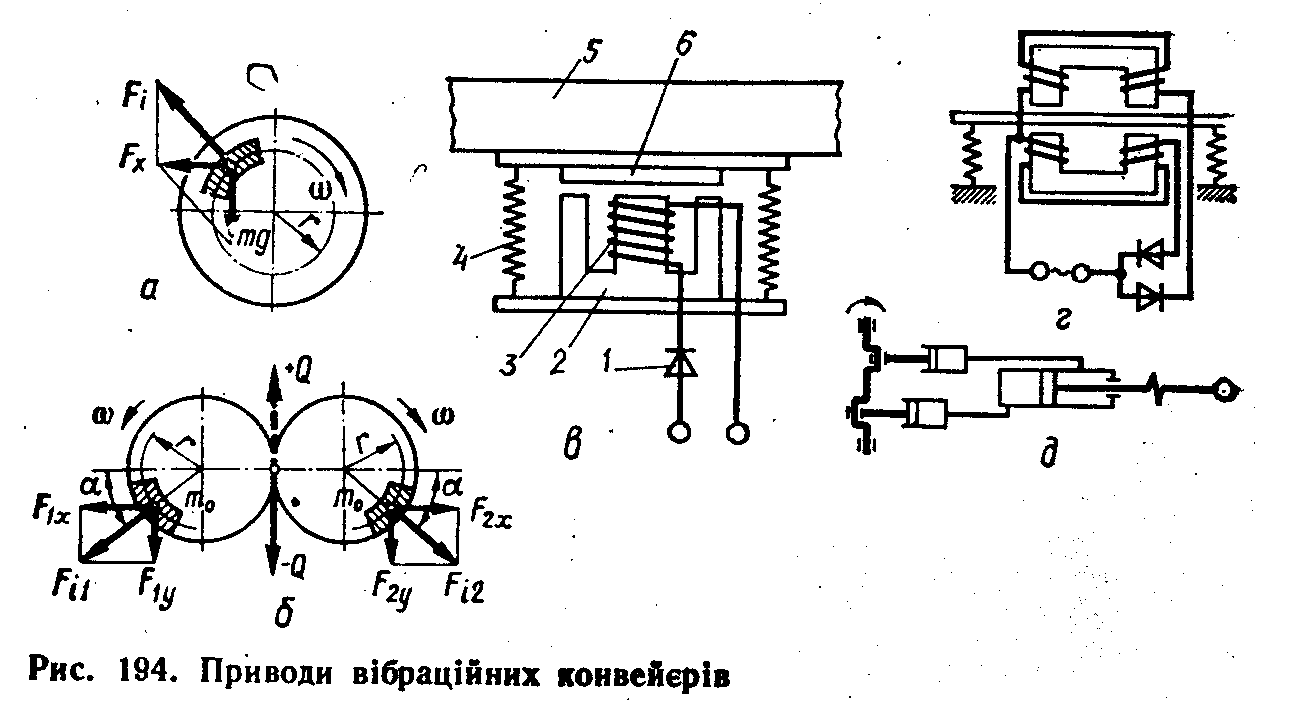
В вібраторах діє збуджувальна сила
F>i> = m>0>ω2r;
m – маси дебалансу;
r – радіус інерції;
ω – кутова швидкість двигуна.
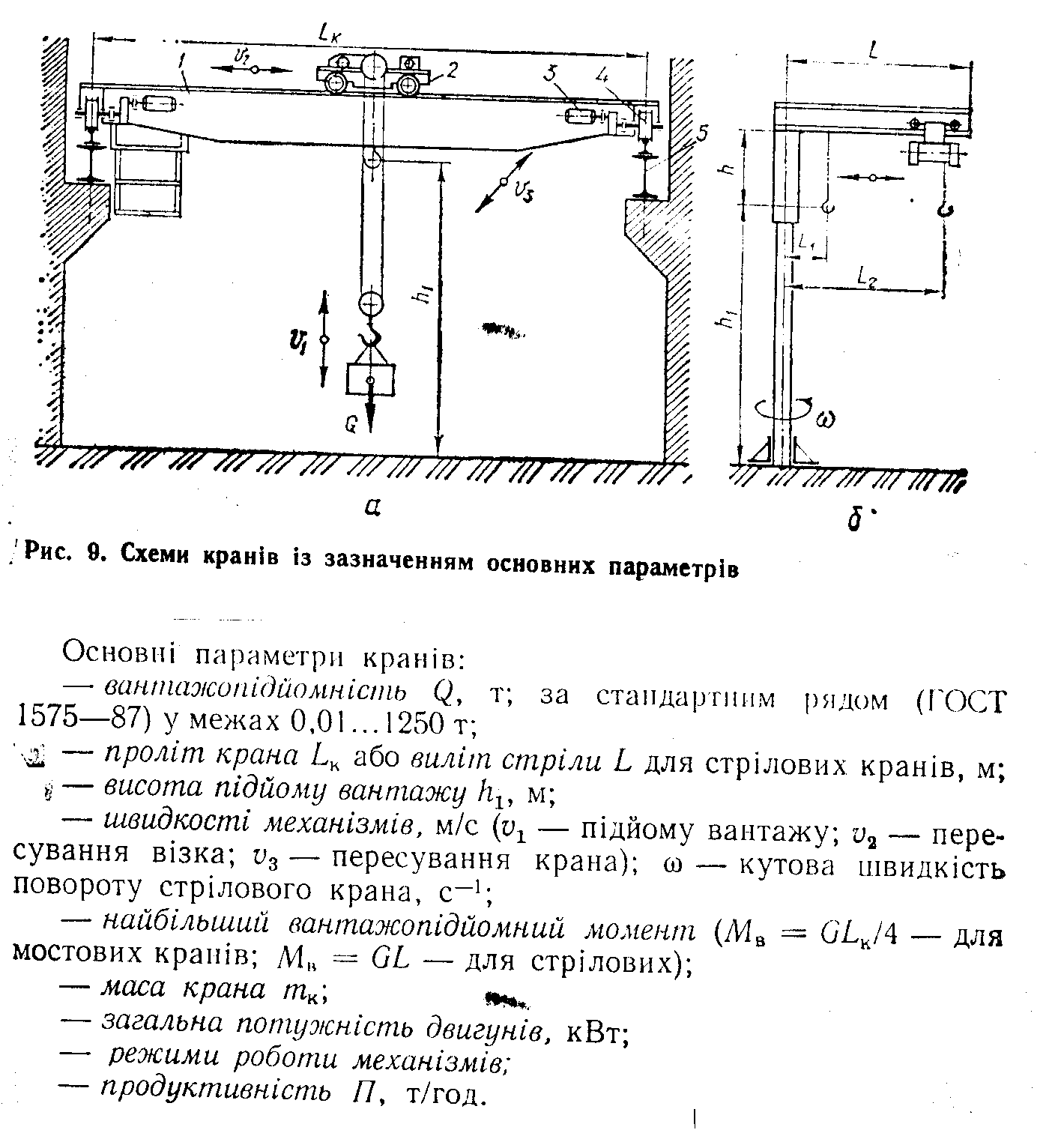
Крани
Вантажопідйомні машини
Основні характеристики машин
вантажопідйомність Q (т) (0,01–1250) т;
проліт крана L>к>, виліт стріли L;
висота підйому h>1>;
вантажний
момент М
= QL
M
=
 ;
;
швидкості механізмів (м/с); υ>1> підйому, υ>2> пересування візка, υ>3> – крана, ω – кутова швидкість повороту;
маса крана m>к>;
загальна потужність двигунів;
режими роботи механізмів;
продуктивність
П
= 3600Q т/год
т/год
t>ц> – тривалість цикла;
К>в> – коефіцієнт використання вантажопідйомності;
К>ч> – коефіцієнт використання за часом;
Коефіцієнт використання вантажопідйомності К>в> = 0,5…1
К>в>
=
Q – мінімальна вантажопідйомність.
Для порівняння техніко-економічних характеристик однотипних машин визначають питомі показники металомісткості енергоємності, вартості.
К>G>= Кр
=
Кр
=

стандартизація;
уніфікація – зведення до конструктивної одноманітності машин;
блочність.
Матеріали для виготовлення кранів
Вуглецеві, леговані та низьколеговані сталі, легкі сплави, полімери, композиційні матеріали: текстоліт, пінопласт, гума, асбест
Режими роботи механізмів і машин
Режим роботи – комплексна характеристика режиму або машини, яка враховує характер навантаження та їхню тривалість, він є основою для розрахунків електросилових параметрів.
Залежно від режиму роботи визначають потужність двигуна, розраховують гальма, канати міцності захоплюючих пристроїв редукторів, визначають строк служби крана.
Нормами передбачено п’ять режимів:
Р – ручний, Л – легкий, С – середній, В-важкий, ДВ – дуже важкий.
Вони визначаються сукупністю коефіцієнта К>в>
К>р>
=
 – річного використання
– річного використання
D>р> – кількість робочих днів протягом року
К>D>
=
 – денного використання
– денного використання
Відносна тривалість вмикання
Т>В>
=

t>р> – тривалість роботи механізму за весь цикл;
Т>ц> – тривалість циклу;
Т>ц> ≤ 1 год;
Для двигунів повторно-короткочасного режиму Т>ц> = 10 хв, якщо Т>ц> > 10 хв, то Т>В> = 100%.
Т>В> =16, 40, 60, 100
В залежності від умов експлуатації передбачено шість груп режимів роботи механізмів, які визначаються сполученням класів використання (10) від С>0> до С>9> і навантаження і Q>0> до Q>4>
Q = 0,6:1
Клас використання визначається загальним числом циклів роботи крана за весь строк його служби. Клас навантаження характеризується коефіцієнтом навантаження.
К>н>
=
Е( )3
)3
Q>i> – маса вантажу, який перевищує кран при числі циклів Сі;
Q>н> – номінальна вантажопідйомність;
С>с> – число циклів за строк служби крана.
Під часом роботи механізму розуміють той час, протягом якого механізм перебуває в русі.
Т
= 365К>р>24К>D>

h = (6…12) років строк служби крана
Навантаження підйомних машин
Навантаженням, що діють на кран, поділяються на:
корисні сили технологічного опору
вагові навантаження крана та його елементів
сили шкідливих опорів (тертя, динамічні, вплив нахилів)
навантаження від зовнішніх впливів (вітер, сніг, крига, землетрус)
Навантаження поділяються на: нормативні, випадкові (пульсація). Корисними силами технологічного опору вважають:
вага вантажу
вага захоплюючих пристроїв
Вагові параметри кранів (Иванченко ст. 127)
Вітрові навантаження
Їх вплив враховують як суму статистичних і динамічних сил. Статистична сила вітру F>в> = рА
р – розподілене вітрове навантаження на даній висоті;
А – площа металоконструкції.
Площа конструкції
А = К>суц>А>г>
А>г> – площа ферми
К>суц>= 0,2…0,6 – прокат (кутники), 0,2…0,4 – труби.
Розподілена сила вітру
Р = qpСК
q=ρ – динамічний тиск на висоті 10 м.
– динамічний тиск на висоті 10 м.
ρ=1,23 кг/м3 – густина повітря
υ – швидкість вітру м/с
С – аеродинамічний коефіцієнт, С = 0,8…1,2 – труби, С = 1,2 – коробчасті конструкції, С = (1,5…1,6) – для балок з поясами.
n – коефіцієнт навантаження, n = (1…0,1)
К – коефіцієнт, що враховує зміну динамічного тиску вітру на висорі.
Розрізняють вітрове навантаження робочого стану, і неробочого стану 125 Па.
Для неробочого стану q = 250 м 450 Па. Для гірських і морських q = 750 м 1000 Па.
Снігове навантаження – добуток тиску від снігу (500–2000 Па) на проекції горизонтальної проекції.
Сейсмічні навантаження.
Динамічні навантаження виникають в кранах в період пуску і розрізняють динамічні навантаження від сил інерції руху мас і навантаження коливального характеру внаслідок пружності елементів машин.
Під дією зовнішніх навантажень (технологічного опору) пружні елементми деформуються, а зосереджені маси машини крім основного руху
здійснюють малі коливання. Моменти і сили в цей період значно перевищують статичні та інерційні навантаження. Динамічні навантаження мають вирішальне значення при розрахунку на міцність в деяких машинах до 90% випадків до руйнування деталей, пов’язаних з втомленістю. Визначення динамічних навантажень складається з таких етапів:
визначення мас і жорсткості валків;
визначення навантажень та характеру їх дій;
складання диференціальних рівнянь руху маси системи;
визначення частот коливань прухних швидкостей в елементах механізмів
Приводи машин
Розділ №12
Привод складається: з двигуна (електро, пневмо, гідродвигун ДВЗ), механічних передач (для перетворення швидкості моментів шляху, і напрямку руху) та обладнання для керування.
Електродвигуни.
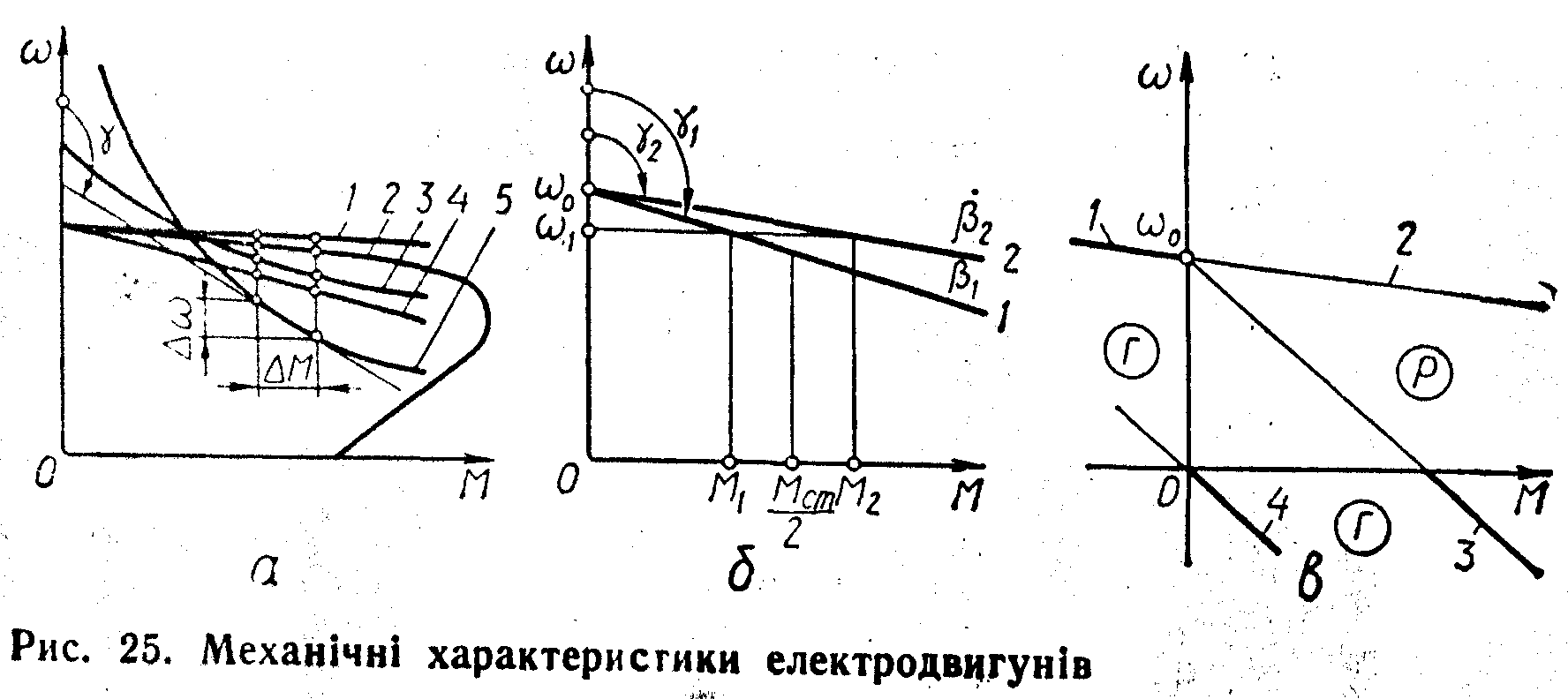
В механізмах підйомних машин використовують двигуни з різними характеристиками:
1) з жорсткими прямолінійними двигуни постійного струму з незалежним і паралельним збудженням
2) асинхронні двигуни

3) м’якими криволінійними характеристиками – двигуни постійного струму з змінним
4) м’якими прямолінійними – штучні характеристики двигунів з додатковим ротором в електричному полі ротора.
5) м’якими – двигуни постійного струму з послідовним збудженням.
Двигуни обирають: по виду струму, напрузі, потужності, пусковим та гальмівним характеристикам, виду механічної техніки, конструктивному виконанню.
двигуни асинхронні з короткозамкненим ротором (НТК, МТКН, NTKF) – прості невелика маса і габарити, малий пусковий момент
асинхронні двигуни з контактними кільцями та з фазовим ротором (МТ, МТВ, МТF, МТН). Забезпечують плавність пуску і гальмування, допускають регулювання швидкості – можливість зменшення пускового струму, при одночасному збільшенні момента.
двигуни постійного струму (Д, МП, ДП). В механізмах підйому використовують двигуни послідовного і змінного струму.
Регулювання робочих швидкостей може бути в межах для ниткових кранів 1:3, а для монтажних 1:15.
Способи регулювання: 1) грубе регулювання (нехтування гальмом, перемикання полюсів двох двигунів з планетарною передачею); 2) багатоступеневе регулювання зміни ступеня ротора, використання КЗП; 3) глибоке регулювання: за допомогою генератора-двигуна; тиристорний привод у гідросхемах дроселями в механічних приводах варіаторами.
Розрізняють три гальмівні режими (рис. 25 в):
генераторний – 1
противмикання – 3
динамічне гальмування – 4
Двигуни виконуються на лапах, фланцеві вмонтовані.
Гальмівні механізми
Гальмівні механізми діляться на: зупинки і гальма. Вони бувають храпові і фракційні.
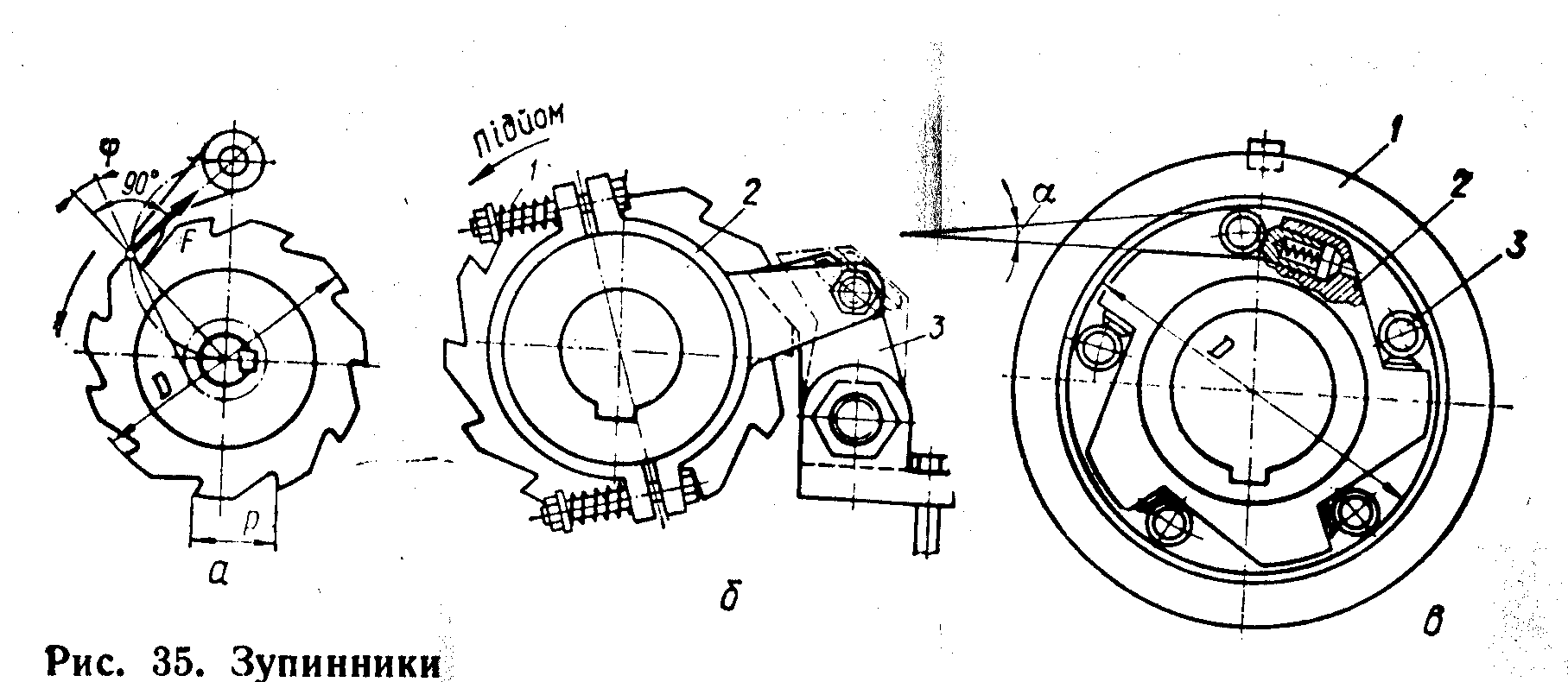
Храповий зупинник складається. Він встановлюється на швидколідному валу (рис. 35в).
1) нерухомий корпус; 2) обертова втулка; 3) ролик.
Розрахунок (Иванченко ст. 82)
Гальма – вмикання сил тертя і перехід від кінетичної енергії в теплову.
Класифікація гальм:
за напрямом дії сил натискання на гальмовий елемент. Радіальні і осьові.
за конструкцією робочого елементу: а) калиткові; б) стрічкові; в) дискові, г) конусні.
за джерелом замикаючої сили: а) ручні; б) пружинні; в) вантажні; г) гідравлічні.
за принципом дії: а) автоматичні; б) керовані.
за призначенням: а) штопорні; б) обмежуючі швидкість.
за характером дії приводного зусилля: а) закритого типу (постійно замкнуті); б) відкритого типу; в) комбіновані.
Автоматичні гальма можуть бути лише закритого типу, а керовані – відкритого або комбінованого. Для розмикання гальм застосовують довго- і короткоходові електромагніти та прилади.
В якості фракційних матеріалів використовують азбестові матеріали до 70% з різними наповнювачами і зв’язуючими, а також порошкових матеріалів.
Середня потужність тертя гальм
Мг =

Колодкові гальма
Вони бувають: одноколодкові, двоколодкові, які управляються електромагнітними або електрогідравлічними пристроями.
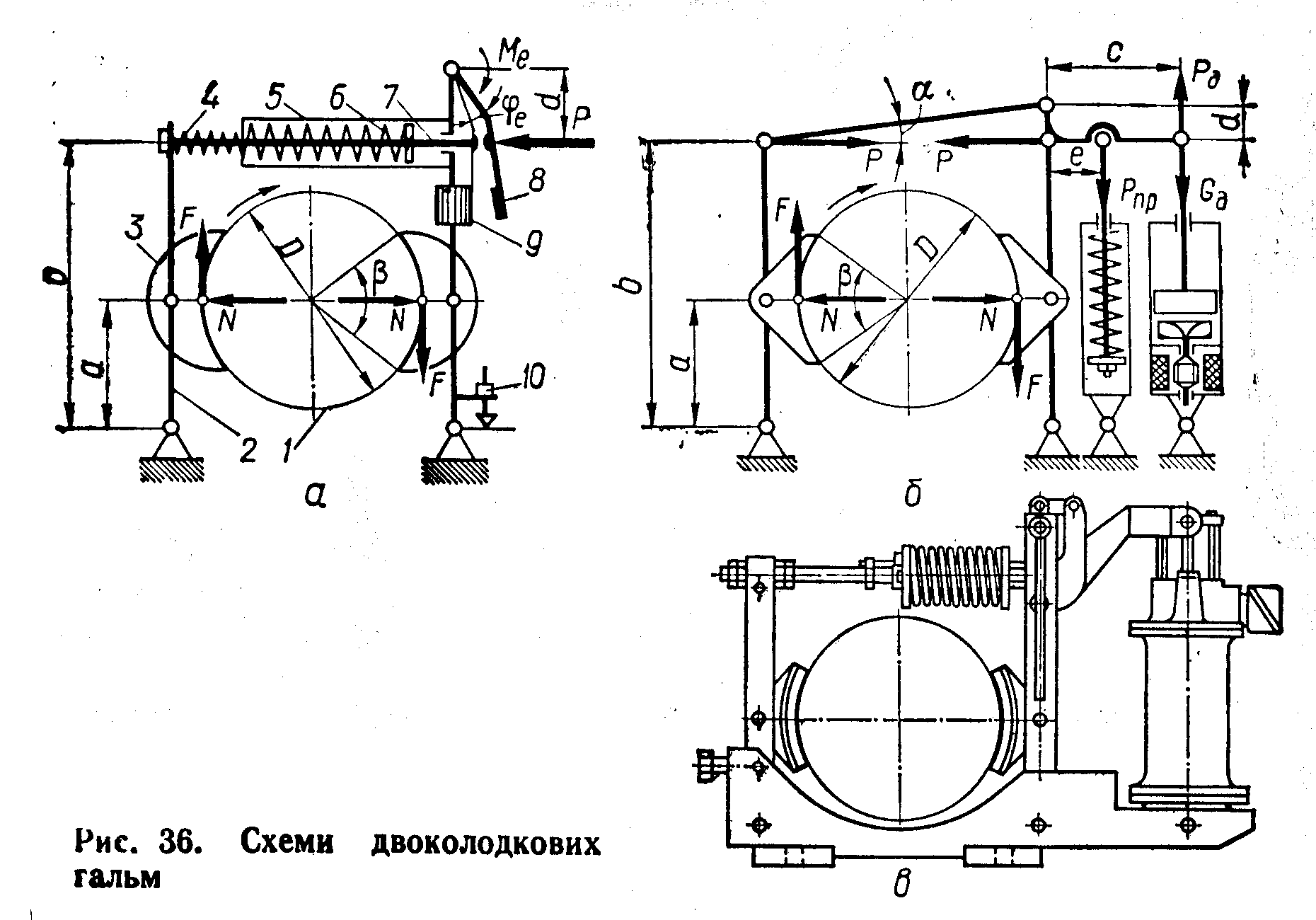
1) шків; 2) гальмові важелі; 3) колодка з фрикційними накладками; 4) допоміжна пружина; 5) скоба; 6) робоча пружина; 7) шток; 8) якір; 9) електромагніт; 10) регулювальний гвинт.
Гальмівні електромагніти бувають: змінного та постійного струму, короткоходові 2–4 мм і шпунжерні 20…80 мм.
Крутний момент від ваги G вантажу зведений до валу двигуна
М>кр>
=

D – діаметр барабана;
U>n> – кратність поліспоста;
U>p> – перед. число редуктора;
Гальмівний момент
М>г> = КМ>кр>
К – коефіцієнт запасу гальмування. К = 1,5…2,5
Діаметр гальмівного шкіфа
D>r>
= 1,5 10-2
f – коефіцієнт тертя стрічки шкіф f = 0,35
P – тиск колодки шкіфу Р = 0,2…0,4мПа
М>г>
= КМ>кр>;
 ;
;
F
=

Розділ №13
Стрічкові гальма
Застосовуються в механізмах де потрібен великий гальмівний момент при невеликих габаритах.
Сталева стрічка з накладками охоплює диск і в результаті притискання відбувається гальмування. Гальма керуються електромагнітними гідро – або пневмоприводами або ножними педалями. Замикання гальм вантажне або пружинне.
Залежно від закріплення кінців стрічки гальма поділяються:
а) прості;
б) диференціальні;
в) двохсторонньої дії.
а) просте стрічкове гальмо односторонньої дії застосовується для нереверсивних механізмів. Колове зусилля
F
=

Натяги стрічки
S
= F ; S
=
; S
=

S = S efa
Ширина стрічки обирається із умов допустимого тиску
В
=

[p] = 0,6…0,8мПа – сторонні
[p] = 0,3…0,4мПа – для спускних
Тиск між стрічкою і шкивом
р
=

Зусилля гальмування
К
=
 =
10…15
=
10…15
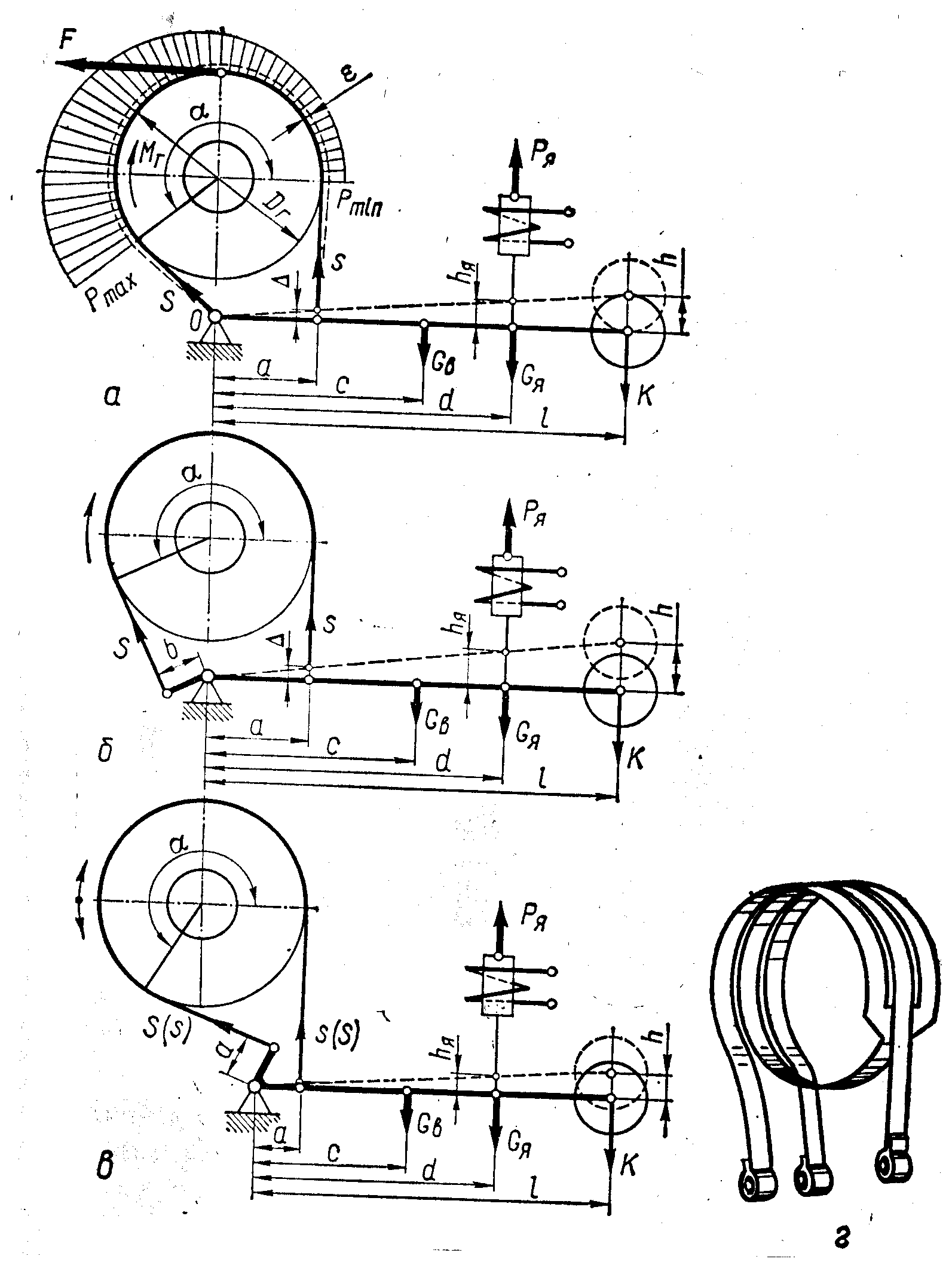
б) диференціальне гальмо односторонньої дії
Сила гальмування
К
=
Гальма з осьовим замиканням
Будова дискового гальма (рис. 43.а)
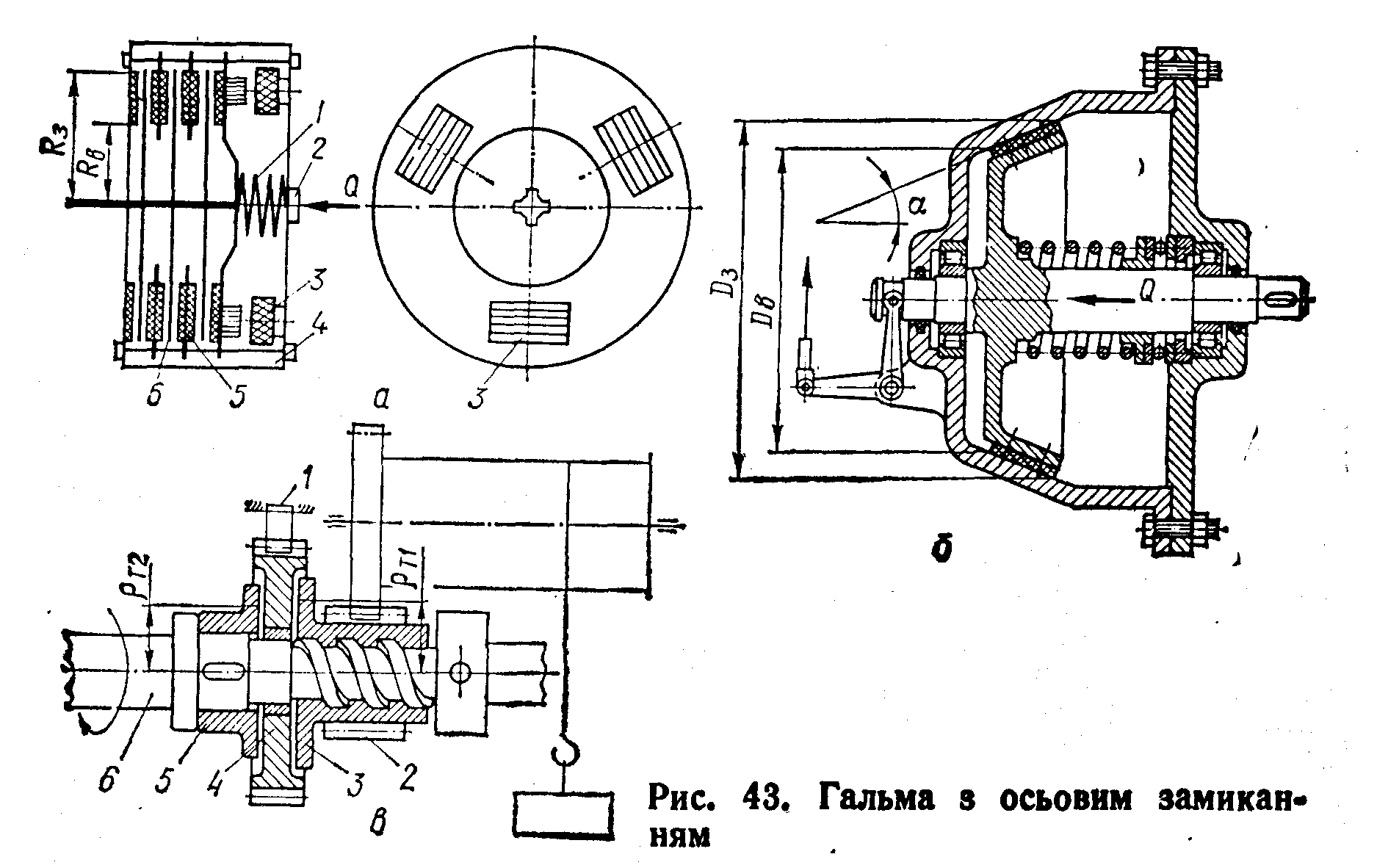
1) пружина; 2) болт; 3) електромагніти; 4) кожух; 5) нерухомі диски; 6) обертові; 7) якір.
Використовуються в механізмах невеликої потужності разом з зупинником.
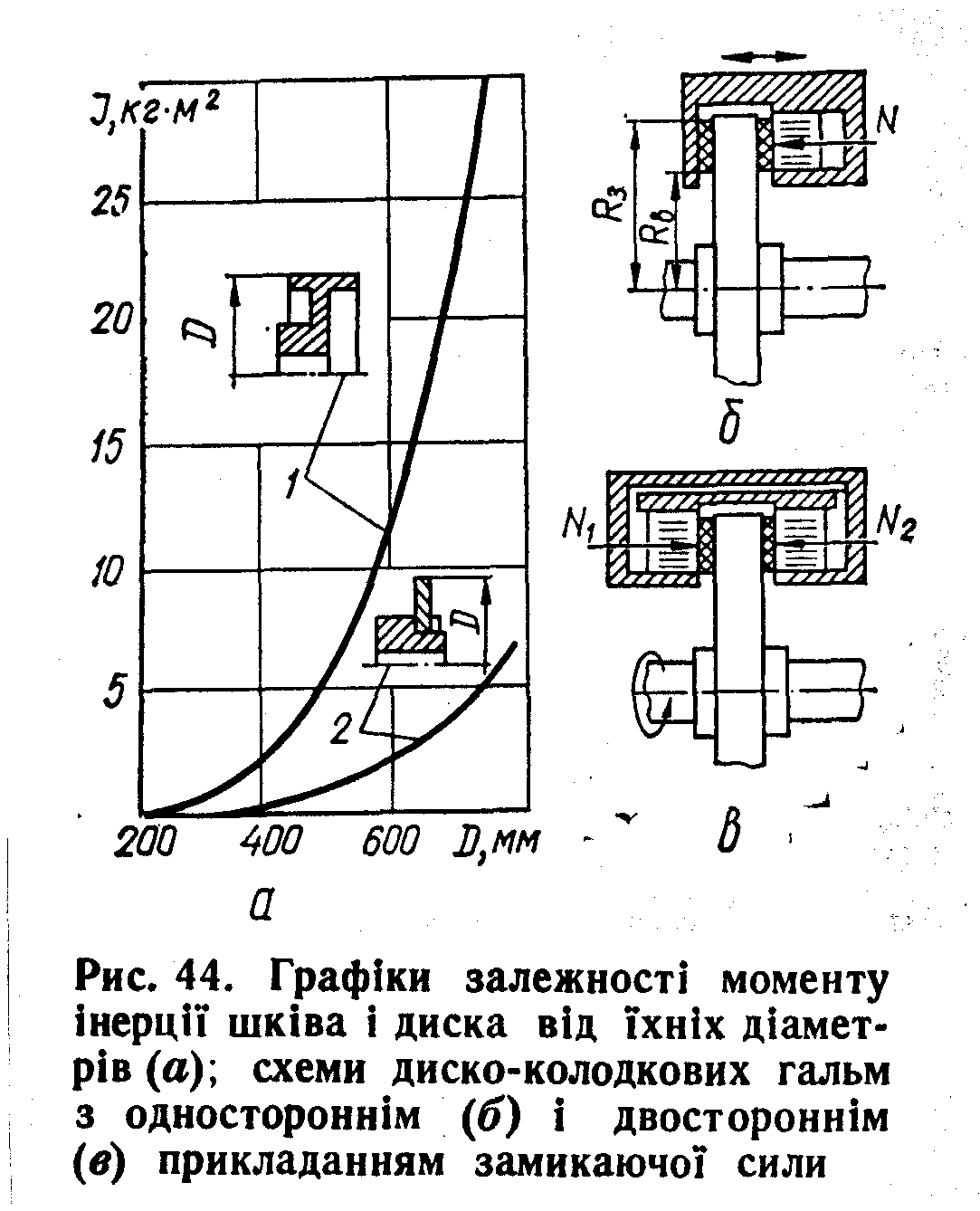
Диско-колодкові гальма
За інструктивним виконанням бувають: із одним і двостороннім прикладанням зусиль. Можуть використовуватись як і шопорні керовані і комбіновані.
Будова гальм з автоматичним регулюванням зазору
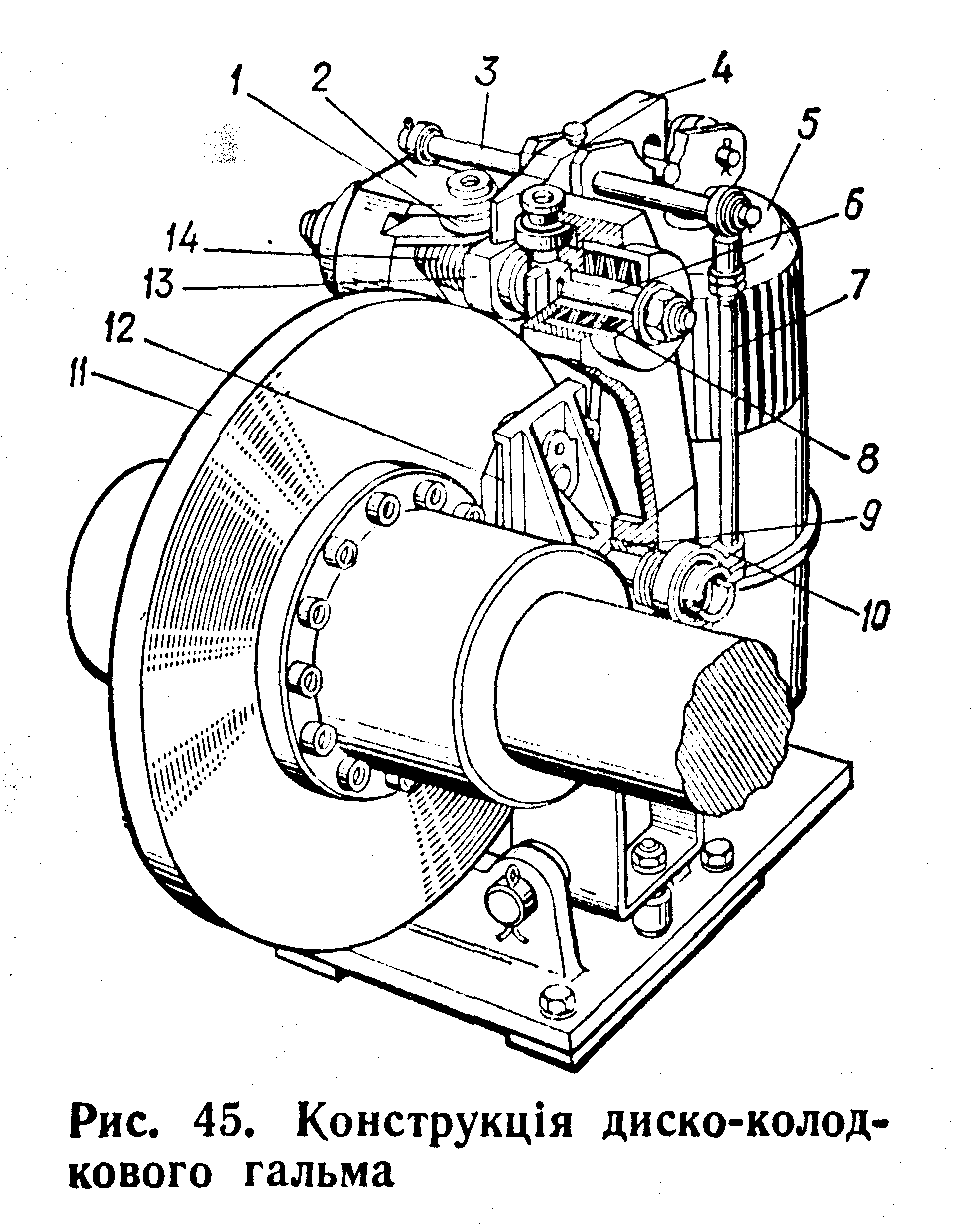
Диск 11 затискається колодками 12, через важелі 2 під дією пружини 8, які стоять на тязі 6. Посередині тяги закріплений важіль з’єднаний із штоком електрогіднопривода 5. При вмиканні привода важіль 13 повертається і діючи клином 4 на ролики 1 і допоміжну пружину 14 розводить важілі 2 і колодки. Пристрій 10 автоматично регулює зазор у важелі колодки вгвинчено порожнисті втулки 9 куди входить циліндричний хвостовик колодок12 на зовнішніх кінцях втулок у переді точено храповик шарнірно з’єднаних тягами з валами 3. При кожному числі гальмування здійснюють коливальний рух повертаючи втулки, змикаючи зазор.
Механізми підйому
Використовуються для вертикального підйому вантажу. Вони поділяються на два типи: 1) з жорсткою кінематичною схемою (канатні, рейкові, гвинтові) 2) з фрикційним приводом.
По кількості двигунів
електричні одно – або двомоторні
гідравлічні
пневматичні
– За типом передач:
циліндричним
планетарним
зубчасті хвильові редуктори
на (рис. 48.а) 1) редуктор; 2) півмуфта з гальмівним шківом; 3) муфта; 4) мотор; 5) гакова підвіска (шківи); 6) поліспасти; 7) барабан.
(48.г) – привод з планетарним редуктором, вали двигунів 1–5 співвісні і обертають центральні колеса Z>1> i Z>2>.
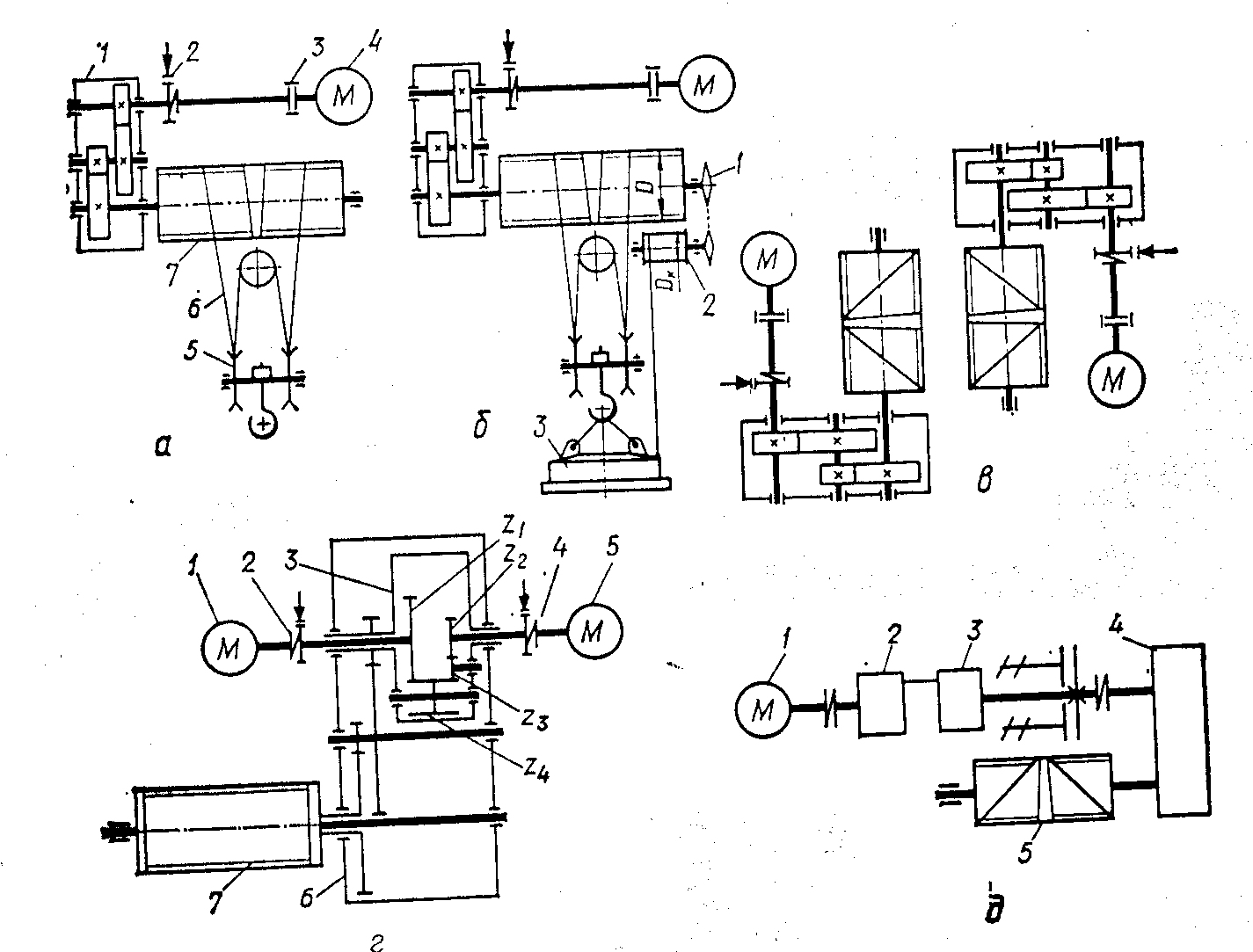 Рис.-48
Рис.-48
Сонячні шестерні Z>1> i Z>2> через проміжну шестерню Z>3> надають рух сателіту Z>4>, закріпленому у водилі 3, яке зв’язано з приводною шестернею двохступінчастого редуктора 6, під’єднаного до барабана 7. Вал двигуна 1 проходить у порожнистому валу, який з’єднує водило з шестернею редуктора двигуна з гальмом з’єднуються муфтами 2…4. Можливо отримати 4 швидкості.
максимально обидва двигуни обертаються в одному напрямку
працює двигун 1
працює двигун 5
мінімально двигуни 1 і 5 працюють у різних напрямках
Розділ №14
Поліспасти
Поліспаст – система рухомих і нерухомих у просторі блоків, що огинаються канатом або ланцюгом, призначена для виграшу в силі (силові або редукторні поліспасти), або швидкості (швидкісні або мультиплікаторні). В підйомних механізмах застосовують силові поліспасти.
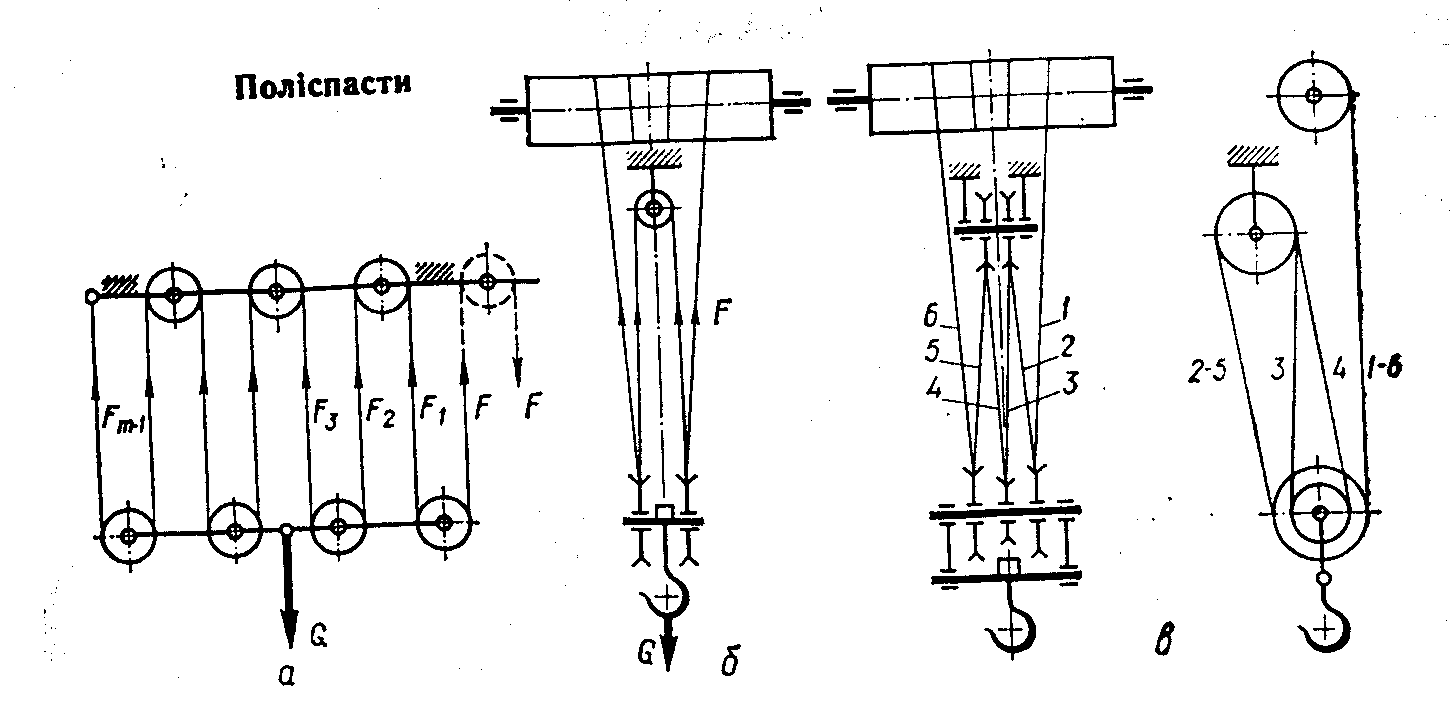
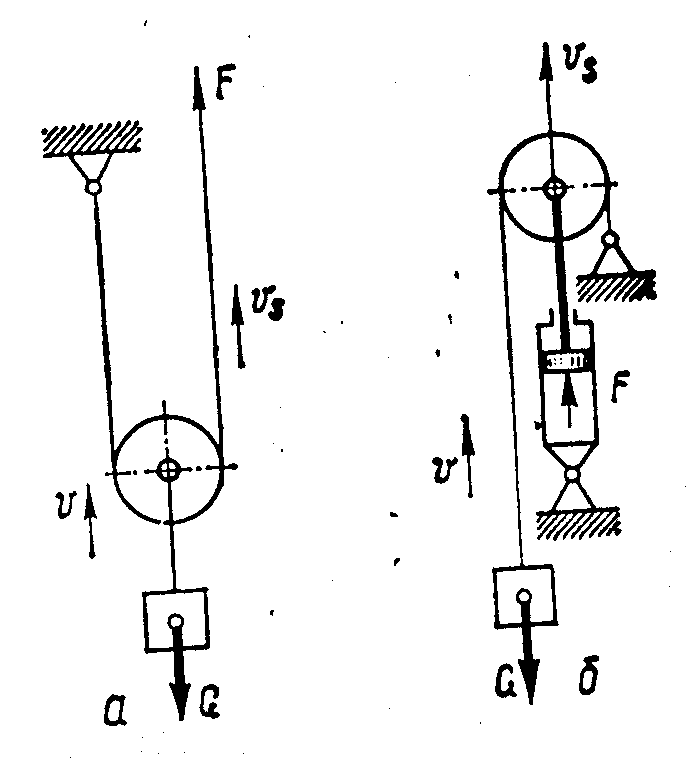 Рис.-49
Рис.-49
Кратність поліспаста
Для поліспаста (а)
F
=
 ; υ>s>
= 2υ>e>
; υ>s>
= 2υ>e>
Для поліспаста (б)
F
=
 ; υ>s>
=
; υ>s>
=
η = 0,95 для блоків, які стоять по підшипниках ковзання
η = 0,98 для блоків по підшипниках кочення
Поліспасти поділяють на одинарні і здвоєні в залежності від числа канатів, які монтуються на барабан.
Зусилля
в канаті F
=

Де m – число віток поліспаста на яких вісить вантаж.
Для одинарного m є і кратністю і передаточним числом.
Натяг у нитці каната, з урахуванням к.к.д. дорівнює
F
= G
=

Загальний ККД поліспасту
η>пл>
=
 ;
;
η>п>
=
Кратність здвоєного поліспаста
η>п>
=
Спеціальні вузли і деталі ВПМ
Гнучкі вантажні органи. До них відносяться канати і ланцюги. Сталеві дротяні канати виготовляються з сталевих дротів діаметром 0,2…0,3 мм з v = 1300–2600 мПа.
Переваги: висока міцність, невелика маса, гнучкість високі швидкості роботи, безшумність, довговічність і надійність, пружність.
Дротики скручуються в стопки, а стопки – навколо осердя.
Канати випускаються бухтами по 250,500,1000,1500 м.
Класифікація канатів
– За типом сукання
з точковим контактом (ТК)
з лінійним контактом (ЛК)
з точково-лінійним контактом ТКЛ
– За напрямом сукання
правого
лівого
– За видом сукання
хрестового
паралельного
комбінованого
– За кількістю стопок: з одною, 3, 6, 7, 8, 18.
– За типом стопок
з круглими стопками
з трьохгранними стопками
з овальними стопками
з плоскими
Канати однобарабанного сукання менш жорсткі, на 50% більший строк служби, але вони самі розкручуються. В підйомних машинах застосовують 6-стопкові канати хрестового сукання з числом дротів 222–366.
Довговічність
канату залежить від відношення
 і коефіцієнту запасу міцності с.
і коефіцієнту запасу міцності с.
Причини руйнування канатів
неправильний підбір пари канат-блок
абразивне спрацьовування
погане
перевантаження
пережим канатів
Розрахунок канатів виконується по розривному зусиллю максимального зусилля в канаті
F>max>>
>=

S>p> = KF>max>
S>p> – розривне зусилля
К – коефіцієнт запасу. К = 5…6 для кранів, К = 9 – для підйомників з людьми, К = 15 для пасажирських ліфтів при υ = 4 м/с
Вантажні ланцюги
Недоліки: велика маса, менша надійність, складність контролювати якість ланцюга, низькі швидкості, більш висока вартість.
За конструкцією ланцюги бувають: зварні і пластинчасті.
За конструкцією зварні ланцюги бувають: коротколанкові крок р=2,6d, і довголанкові р=3,6d
За точністю: калібровані і некалібровані.
Розрахунок ланцюгів аналогічний канатам для ручного приводу К=3 для машинного К=6…8.
Максимальний натяг ланцюга залежить і від кута нахилу віток.
F
=
 ;
α≤600
;
α≤600
Блоки
Служать для спрямування канатів. Виготовляються із с4–15. блоки сильновантажні сталь. Діаметр блока із умов довговічності. Канати, залежно від діаметру каната типу механізму та режиму роботи.
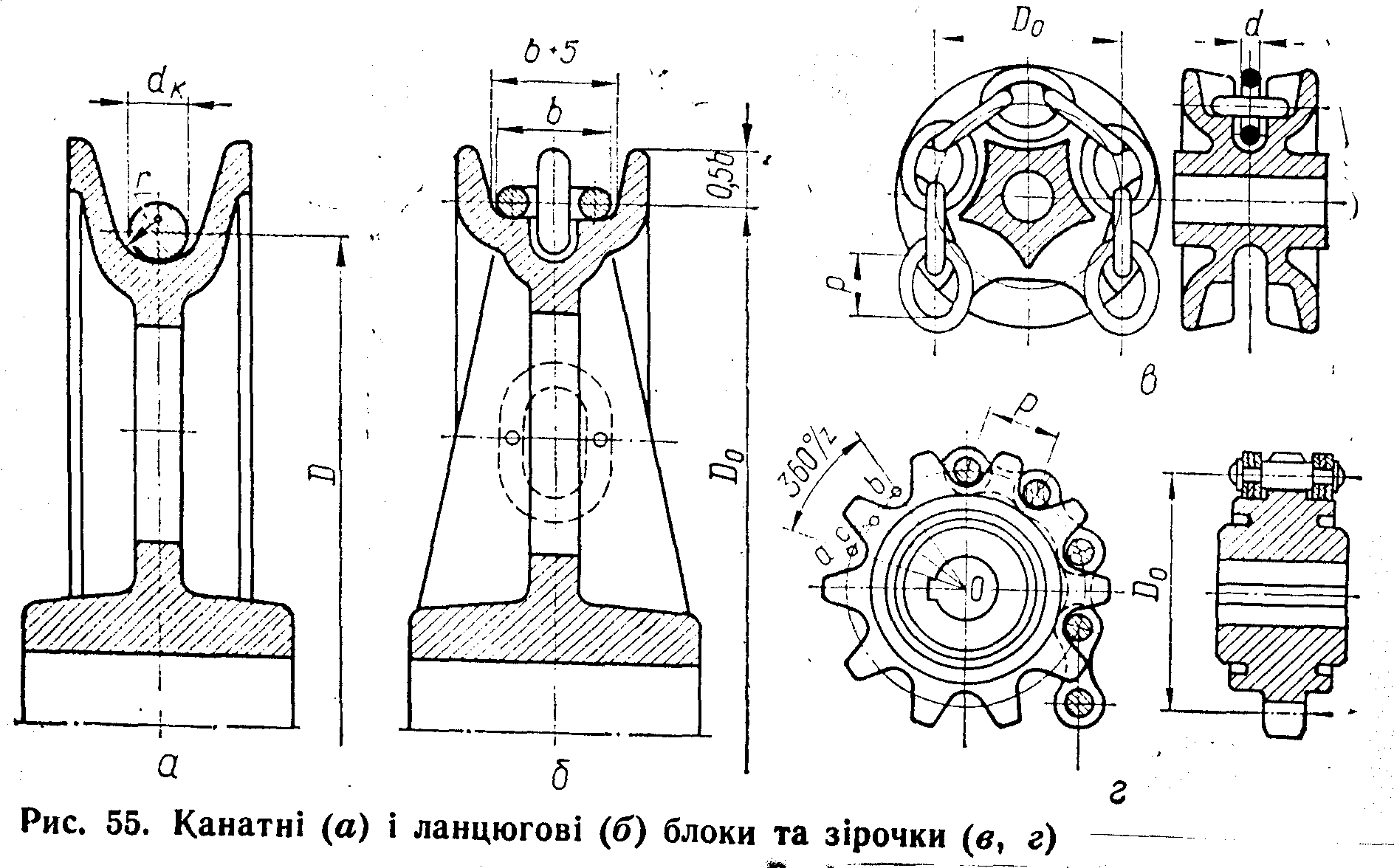
Діаметр блока по центру каната
D ≥ edК
е – 16–35 для класів 41–46 для підйому
Частота обертання блока
n
=

Зірочки:
Для зірочок Z>min>=5. Діаметр зірочок
D>з> = (20…30)α
Для пластинчастого ланцюга
D>0>
=
