Проектирование цифровой следящей системы
ПРОЕКТИРОВАНИЕ ЦИФРОВОЙ СЛЕДЯЩЕЙ СИСТЕМЫ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к курсовой работе
по курсу
“Теория автоматического управления”
для студентов специальности 7.091 401
560 IF S = 2 THEN T(3) = .8 * T(3)
570 IF S > 2 THEN T(3) = .7 * T(3)
580 X3 = LOG(1 / T(3))
590 PRINT "T(1)="; T(1); "T(2)="; T(2); "T(3)="; T(3)
600 PRINT "Cкобка в знаменателе (Т(3)*Р+1) должна возводиться в степень (n-m)"
610 PRINT "n-m="; S
620 FOR I = 1 TO M
630 K = 3 + M
640 PRINT "T("; K; ")="; T(K)
650 NEXT I
660 PRINT "Wc="; OC; "LgWc="; XC
670 PRINT "Lg(1/T1)="; X1; "Lg(1/T2)="; X2; "Lg(1/T3)="; X3
680 END
О Г Л А В Л Е Н И Е
1. Введение
2. ЗАДАНИЕ НА ВЫПОЛНЕНИЕ КУРСОВОЙ РАБОТЫ
3. ПОРЯДОК РАСЧЕТА СЛЕДЯЩЕЙ СИСТЕМЫ
3.1. Разработка функциональной схемы.
3.2. Выбор исполнительного двигателя.
3.3. Выбор усилителя мощности.
3.4. Составление передаточных функций элементов следящей системы
3.5. Расчет последовательного непрерывного корректирующего звена методом ЛАЧХ
3.6. Моделирование следящей системы с непрерывным последовательным корректирующим звеном
3.7. Определение дискретной передаточной функции корректирующего звена
3.8. Моделирование цифровой следящей системы.
3.9. Получение рекуррентного уравнения цифрового корректирующего звена.
3.10. Разработка принципиальной схемы цифровой следящей системы.
ПРИЛОЖЕНИЯ
1. Введение
Цель курсовой работы - получить навыки расчета линейных систем автоматического управления с цифровым корректирующим звеном, роль которого может выполнять микропроцессор, управляющая вычислительная машина, или любое специализированное цифровое управляющее устройство.
В соответствии с заданием необходимо разработать следящую систему, удовлетворяющую определенным техническим условиям. Система должна обеспечивать синхронное и синфазное вращение двух осей, механически не связанных между собой. Входом системы является угол поворота сельсина-датчика, а выходом - угол поворота выходного вала редуктора, механически связанного с рабочим механизмом и с ротором сельсина-приемника.
Следящие системы рассматриваемого типа широко применяются для дистанционного управления различными механизмами, а также при построении автоматических систем управления в различных отраслях промышленности.
Для обеспечения заданных показателей качества переходного процесса в систему вводится цифровое управляющее (корректирующее) звено. Расчет корректирующего звена проводится методом логарифмических частотных характеристик, разработанным для расчета непрерывных систем управления. Использование данного метода для расчета цифрового корректирующего звена основано на предположении о том, что при малом периоде квантования по времени цифровая система по своим свойствам приближается к непрерывной, а при достаточно большом числе цифровых разрядов вычислительного устройства нелинейностью, вносимой квантованием сигналов по уровню, можно пренебречь. Современный уровень развития цифровой вычислительной техники позволяет применять в управляющем вычислительном устройстве период квантования непрерывных сигналов по времени порядка 0,01-0,001с. , что обычно является вполне достаточным для обеспечения адекватности по динамическим свойствам цифровой и непрерывной систем.
190 PRINT "Введите величину макс. перерегулирования"
200 PRINT "Сигма макс.,% ="
210 INPUT SM
220 IF SM = 10 THEN C = 5: L1 = 18
230 IF SM = 15 THEN C = 4.4: L1 = 15
240 IF SM = 20 THEN C = 4: L1 = 13.5
250 IF SM = 25 THEN C = 3.6: L1 = 12
260 IF SM = 30 THEN C = 3.2: L1 = 11
270 IF SM = 35 THEN C = 3: L1 = 10.5
280 IF SM = 40 THEN C = 2.8: L1 = 10
290 PRINT "Порядок астатизма NU="
300 INPUT NU
310 PRINT "Коэффициент усиления желаемой системы Кс="
320 INPUT KC
330 PRINT "Время регулирования TR="
340 INPUT TR
350 M1 = .434
360 OC = C * 3.14 / TR
370 XC = LOG(OC) * M1
380 B = 20 * XC
390 X2 = (B - L1) / 20
400 T(2) = 1 / (10 ^ X2)
410 A = 20 * LOG(KC) * M1
420 X1 = (L1 + 40 * X2 - A) / 20
430 T(1) = 1 / (10 ^ X1)
440 X3 = (L1 + 20 * XC) / 20
450 T(3) = 1 / 10 ^ X3
460 IF NU = 1 THEN GOTO 490
470 X1 = (40 * X2 + L1 - A) / 40
480 T(1) = 1 / (10 ^ X1)
490 M = 0
510 FOR I = 1 TO N
520 IF T3(I) <= T(3) * .75 THEN M = M + 1: T(3 + M) = T3(I)
540 NEXT I
550 S = N - M
2330 PRINT "T2("; I; ")="
2340 INPUT T(I)
2350 NEXT I
2420 GOTO 2120
Приложение 5
Программа LOGHAR. doc
Определение постоянных времени
передаточной функции желаемой системы
10 PRINT "Определение пост. времени передат. функции желаемой системы"
20 PRINT "Искомая перед. ф-ция имеет вид:"
30 PRINT " Kc(T(2)*P+1)/((T(1)*P+1)*(T(3)*P+1)^(n- m)*(T(4)P+1)*..(T(m+3)P+1)*P)"
40 PRINT "n-степень полинома Q(P) - знаменателя перед. ф-ции заданной сист."
50 PRINT "m-количество пост. времени Q(P), меньших, чем Т(3)"
60 PRINT "Q(P)=(Tз(1)*P+1)*(Tз(2)*P+1)*...*(Tз(N)*P+1)"
70 PRINT "Введите порядок полинома знаменателя Q(P) заданной перед. ф-кции"
80 PRINT "N="
90 INPUT N
100 DIM T3(5), T(8)
110 FOR I = 1 TO 8
120 T(I) = 0
130 NEXT I
140 PRINT "Введите пост. времени знаменат. заданной перед. ф-ции Q(P)"
150 FOR I = 1 TO N
160 PRINT "Tз("; I; ")="
170 INPUT T3(I)
180 NEXT I
2. ЗАДАНИЕ НА ВЫПОЛНЕНИЕ КУРСОВОЙ РАБОТЫ
2.1. Цель курсовой работы - проектирование следящей системы, удовлетворяющей заданным техническим условиям.
2.2. Измерительное устройство - сельсинная пара.
2.3. Исполнительный двигатель - двигатель постоянного тока серии МИ.
2.4. Усилитель мощности - электромашинный усилитель с поперечным полем.
2.5. Исходные данные для проектирования системы.
2.5.1. Статический момент
нагрузки объекта управления
- Mос,
Н.м.
2.5.2. Момент инерции объекта управления - Jо, кг.м2
2.5.3.
Максимальная угловая скорость
объекта
управления
- о
max.
2.5.4.
Максимальное угловое ускорение объекта
управления
- о
max.
2.5.5. Требования,
предъявляемые к качеству процесса
управления:
максимальное
перерегулирование -
max,;
время регулирования
- tр,
с;
максимальная
кинетическая ошибка - xmax,
рад.
Варианты исходных данных приведены в прил. 1.
2.6. Курсовая работа должна содержать следующие разделы.
2.6.1. Разработка функциональной схемы.
2.6.2. Выбор элементов системы - исполнительного двигателя (серии МИ) и электромашинного усилителя мощности (ЭМУ), расчет передаточного числа редуктора.
2.6.3. Составление передаточных функций элементов нескорректированной следящей системы.
2.6.4. Построение логарифмических частотных характеристик (ЛАЧХ ) нескорректированной системы, желаемой системы и последовательного корректирующего звена.
2.6.5. Построение на ЭВМ переходной функции H(t) и определение по ней показателей качества переходного процесса для системы с непрерывным последовательным корректирующим звеном.
2.6.6. Определение дискретной передаточной функции последовательного корректирующего звена по его непрерывной передаточной функции.
2.6.7. Построение на ЭВМ переходной функции H(t) и определение по ней показателей качества переходного процесса для системы с дискретным корректирующим звеном.
2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена.
2.6.9. Разработка принципиальной схемы цифровой следящей системы.
2.7. Расчетно-пояснительная записка должна содержать следующие разделы.
2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее работы, описание функциональной схемы системы).
2.7.2. Исходные данные для проектирования системы.
2.7.3. Расчетная часть.
2.7.4. Заключение (основные характеристики спроектированной системы).
2.7.5. Список литературы.
2.8. Расчетно-пояснительная записка должна включать в себя функциональную, структурную и принципиальную электрические схемы следящей системы; ЛАЧХ и ЛФЧХ скорректированной и нескорректированной системы, графики переходных функций системы с непрерывным и с дискретным корректирующим звеном, другие рисунки, таблицы и графики, необходимые для выполнения данной работы.
2.9. Записка должна быть оформлена в соответствии с требованиями ЕСКД (написана черными чернилами или пастой, либо отпечатана на принтере на листах формата 11). Ориентировочный объем записки - 25 - 30 страниц.
620 GOTO 270
630 FOR I = 0 TO N
640 PRINT "S("; I; ")="; S1(I); TAB(40); "G("; I; ")="; S(I)
650 NEXT I
660 END
2060 L = 1
2070 PRINT "Введите постоянные времени числителя T1(I)"
2080 FOR I = 1 TO N
2090 PRINT "T1("; I; ")="
2100 INPUT T(I)
2110 NEXT I
2112 PRINT "Введите коэффициент K"
2114 PRINT "K="
2116 INPUT K
2120 A(0) = 1
2130 A(1) = T(1) + T(2) + T(3) + T(4) + T(5)
2140 X1 = T(1) * T(2) + T(1) * T(3) + T(1) * T(4) + T(1) * T(5)
2150 X2 = T(2) * T(3) + T(2) * T(4) + T(2) * T(5)
2160 X3 = T(3) * T(4) + T(3) * T(5) + T(4) * T(5)
2170 A(2) = X1 + X2 + X3
2180 X1 = T(1) * T(2) * T(3) + T(1) * T(2) * T(4) + T(1) * T(2) * T(5)
2190 X2 = T(1) * T(3) * T(4) + T(1) * T(3) * T(5) + T(1) * T(4) * T(5)
2200 X3 = T(2) * T(3) * T(4) + T(2) * T(3) * T(5) + T(3) * T(4) * T(5)
2210 A(3) = X1 + X2 + X3 + T(2) * T(4) * T(5)
2220 X1 = T(1) * T(2) * T(3) * T(4) + T(1) * T(2) * T(3) * T(5)
2230 X2 = T(1) * T(2) * T(4) * T(5) + T(1) * T(3) * T(4) * T(5)
2240 A(4) = X1 + X2 + T(2) * T(3) * T(4) * T(5)
2250 A(5) = T(1) * T(2) * T(3) * T(4) * T(5)
2260 IF L = 2 GOTO 240
2270 FOR I = 0 TO N
2280 B(I) = A(I) * K
2290 NEXT I
2300 L = 2
2310 PRINT "Введите постоянные времени знаменателя T2(I)"
2320 FOR I = 1 TO N
280 V2 = 4 * B(2) * T ^ (N - 2)
290 V3 = 8 * B(3) * T ^ (N - 3): V4 = 16 * B(4) * T ^ (N - 4)
300 V5 = 32 * B(5)
310 S(N) = V0 + V1 + V2 + V3 + V4 + V5
320 X1 = V0 * N + V1 * (N - 2) + V2 * (N - 4)
330 X2 = V3 * (N - 6) + V4 * (N - 8) - 5 * V5
340 S(N - 1) = X1 + X2
350 X1 = V0 * N * (N - 1) / 2 + V1 * (N - 1) * (N - 4) / 2
360 X2 = V2 * ((N - 2) * (N - 7) + 2) / 2
370 X3 = V3 * ((N - 3) * (N - 10) + 6) / 2
380 X4 = V4 * (22 - 4 * N) + 10 * V5
390 S(N - 2) = X1 + X2 + X3 + X4
400 X0 = V0 * N * (N - 1) * (N - 2) / 6
410 X1 = V1 * (N - 1) * (N - 2) * (N - 6) / 6
420 X2 = V2 * ((N - 2) * (N - 3) * (N - 10) + 6 * (N - 2)) / 6
430 X3 = V3 * (3 * (N - 3) * (6 - N) - 2) / 2
440 X4 = V4 * (6 * N - 28) - 10 * V5
445 IF N < 3 GOTO 550
450 S(N - 3) = X0 + X1 + X2 + X3 + X4
460 X0 = V0 * N * (N - 1) * (N - 2) * (N - 3) / 24
470 X1 = V1 * (N - 1) * (N - 2) * (N - 3) * (N - 8) / 24
480 X2 = V2 * (N - 2) * (N - 3) * (3 - 2 * (N - 4)) / 6
490 X3 = V3 * (N - 3) * (3 * (N - 4) - 2) / 2
500 X4 = V4 * (17 - 4 * N) + 5 * V5
510 IF N < 4 GOTO 550
520 S(N - 4) = X0 + X1 + X2 + X3 + X4
530 IF N < 5 GOTO 550
540 S(N - 5) = V0 - V1 + V2 - V3 + V4 - V5
550 IF R = 2 GOTO 630
560 FOR I = 0 TO N
570 B1(I) = B(I)
580 B(I) = A(I)
590 S1(I) = S(I)
600 NEXT I
610 R = 2
3. ПОРЯДОК РАСЧЕТА СЛЕДЯЩЕЙ СИСТЕМЫ
3.1. Разработка функциональной схемы
В проектируемой следящей системе в качестве исполнительного двигателя (Д) должен быть использован двигатель постоянного тока серии МИ, в качестве усилителя мощности - электромашинный усилитель с поперечным полем (ЭМУ). Для измерительного устройства (ИУ) рекомендуется использовать сельсинную пару: сельсин-датчик и сельсин-трансформатор (приемник). Так как измерительное устройство работает на переменном токе, а усилитель мощности и исполнительный двигатель - на постоянном токе, то после измерительного устройства должен быть применен фазовый детектор (ФД). Кроме указанных элементов в функциональную схему входят корректирующее устройство (КУ), усилитель напряжения (У), редуктор (Р), посредством которого исполнительный двигатель соединяется с объектом управления и ротором сельсина-трансформатора, и объект управления (ОУ). Корректирующее устройство представлено тремя блоками: аналого-цифровой преобразователь (АЦП), вычислитель (В) и цифро-аналоговый преобразователь (ЦАП).
Функциональная схема цифровой следящей системы приведена на рис.1.

ОУ
Рис.1. Функциональная схема цифровой следящей системы
3.2. Выбор исполнительного двигателя
Выбор двигателя начинают с расчета требуемой мощности, которая должна быть достаточной для обеспечения заданных скорости и ускорения объекта управления при заданной нагрузке.
Требуемая мощность, Вт:
где >р>КПД редуктора, >р = >0,72 .
По каталогу (прил.2) выбираем ближайший двигатель большей мощности Р>н > >Р>тр >и выписываем его паспортные данные:
Р>н> - номинальная мощность (Вт);
n>н >- номинальная скорость вращения (об/мин);
U>н - >номинальное напряжение (В);
I>н> - номинальный ток якоря (А);
R>д>- сопротивление цепи обмотки якоря (Ом);
J>д> - момент инерции якоря (кг.м2);
>д>- КПД двигателя.
Затем последовательно определяем следующие величины:
номинальная угловая скорость двигателя >н >(с-1) -
>н> = n>н>/30 ;
номинальный момент двигателя М>н> (Н.м) -
М>н> = 9,55Р>н>/n>н ;>
> >оптимальное передаточное число редуктора i>р >-
J>р> = 1.10-4 кг.м2 - момент инерции редуктора.
35 PRINT "R(P)=K*(T1(1)*P+1)*(T1(2)*P+1)*...*(T1(N)*P+1)"
36 PRINT "Q(P)=(T2(1)*P+1)*(T2(2)*P+1)*...*(T2(N)*P+1)"
60 PRINT "Искомая дискретная передаточная функция имеет вид:"
70 PRINT "K(Z)=S(Z)/G(Z), где"
80 PRINT "S(Z)=S(0)+S(1)*Z+S(2)*Z^2+...+S(N)*Z^N"
9
0
PRINT G(Z)=G(0)+G(1)*Z+G(2)*Z^2+...+G(N)*Z^N+G(N+1)*
*Z^(N+1)"
100 DIM A(5), B(5), B1(5), S(5), S1(5), G(6), T1(5), T2(5)
102 FOR I = 0 TO 5
104 A(I) = 0: B(I) = 0: S(I) = 0: G(I) = 0
106 NEXT I
108 R = 1
110 PRINT "Введите порядок полинома Q(P) -N, N<=5"
120 PRINT "N="
130 INPUT N
131 PRINT "Задайте величину коэффициента F"
132 PRINT "F="
133 INPUT F
134 IF F = 1 GOTO 140
135 IF F = 2 GOTO 2060
136 GOTO 131
140 PRINT "Введите коэффициенты числителя В(0)...В(N)"
150 FOR I = 0 TO N
160 PRINT "B("; I; ")="
170 INPUT B(I)
180 NEXT I
190 PRINT "Введите коэффициенты знаменателя A(0)...A(N)"
200 FOR I = 0 TO N
210 PRINT "A("; I; ")="
220 INPUT A(I)
230 NEXT I
240 PRINT "Введите период квантования по времени Т"
250 PRINT "T="
260 INPUT T
270 V0 = B(0) * T ^ N: V1 = 2 * B(1) * T ^ (N - 1)
Приложение 3 Технические данные ЭМУ
|
Тип ЭМУ |
Мощ- |
Мощн. управ- |
Напря- |
Ток якоря |
Сопрот. обмот- |
Постоянные Ту Ткз |
|
|
кВт |
Вт |
В |
А |
Ом |
с |
с |
|
|
ЭМУ-3А3 |
0,2 |
0,4 |
115 |
1,75 |
1000 |
0,005 |
0,018 |
|
ЭМУ-5А3 |
0,5 |
0,4 |
115 |
4,35 |
1000 |
0,01 |
0,033 |
|
ЭМУ-12А3 |
1,0 |
0,4 |
115 |
8,7 |
2200 |
0,015 |
0,06 |
|
ЭМУ-25А3 |
2,0 |
0,4 |
230 |
9,1 |
1500 |
0,02 |
0,1 |
|
ЭМУ-50А3 |
4,0 |
0,5 |
230 |
17,4 |
2200 |
0,03 |
0,17 |
|
ЭМУ-70А3 |
6,0 |
0,5 |
230 |
26 |
1500 |
0,04 |
0,22 |
|
ЭМУ-100А3 |
8,5 |
0,5 |
230 |
37 |
1000 |
0,06 |
0,28 |
Приложение 4
Программа расчета коэффициентов дискретной передаточной функции по коэффициентам непрерывной передаточной функции
10 REM Определение дискретной передаточной функции по непрерывной
11 REM Используется билинейное преобразование
12 REM P=2*(Z-1)/(T*(Z+1))
20 PRINT "Исходная передаточная функция должна быть представлена в виде"
30 PRINT "K(P)=R(P)/Q(P), возможны две формы представления"
31 PRINT "Форма 1 - F=1:"
32 PRINT "R(P)=B(0)+B(1)*P+B(2)*P^2+...+B(N)*P^N"
33 PRINT "Q(P)=A(0)+A(1)*P+A(2)*P^2+...+A(N)*P^N"
34 PRINT "Форма 2 - F=2:"
Определяем требуемый момент на валу двигателя:
Выбранный двигатель нужно проверить, удовлетворяет ли он по моменту и скорости в соответствии со следующими условиями:
М>тр>/М>н> >o max >i>р / >>н > a ;
где коэффициент допустимой перегрузки двигателя по моменту (для двигателя постоянного тока a - коэффициент допустимого кратковременного увеличения скорости двигателя сверх номинальной, обычно a = 1,2 - 1,5.
Пример.
Выбрать исполнительный двигатель
следящей системы, если согласно
техническому заданию: J>о>=
100 кг.м2;
М>ос>=
120 Нм; >оmax>=
0,7 с-1;
>omax>=
0,44 с-2
; >р>
= 0,72.
Требуемая мощность двигателя
Р>тр> = 2(120 + 100. 0,44). 0,7 /0,72 = 319 Вт .
Выбираем
двигатель типа МИ-22 (прил.2) со следующими
параметрами: Р>н>
= 370 Вт; U>н>
= 110 В; n>н>
= 3000 об/мин;
J>д>
= 0,004 кг.м2.
Зададимся моментом инерции редуктора, приведенного к валу двигателя J>р>=1.10-4 кг.м2, найдем передаточное число редуктора
Требуемый момент

Номинальный момент выбранного двигателя равен:

Проведем
проверку двигателя:
по моменту - 1,28/1,18< 10 ;
по скорости - 0,7.355/314 = 0,79 < 1,5 .
В результате проверок двигателя по моменту и скорости видно, что он не перегружен. Следовательно, двигатель МИ-22 выбран правильно.
3.3. Выбор усилителя мощности
В качестве усилителя мощности используем ЭМУ с поперечным полем. При выборе усилителя необходимо соблюдать следующие условия.
1. Номинальная мощность усилителя должна удовлетворять неравенству
Р>ун> Р>н> / >д> ,
где >д> - КПД двигателя.
2. Номинальное напряжение усилителя должно быть не меньше номинального напряжения исполнительного двигателя.
3. Номинальный ток усилителя должен быть не меньше, чем номинальный ток двигателя.
Учитывая указанные условия выбираем тип ЭМУ (см. прил. 3).
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
МИ-32 |
0,76 |
2500 |
110 |
8,2 |
0,368 |
80 |
0,0132 |
|
0,45 |
1500 |
110 |
5,0 |
0,975 |
75 |
0,0132 |
|
|
0,37 |
1000 |
110 |
4,2 |
2,21 |
73 |
0,0132 |
|
|
0,76 |
2500 |
220 |
4,1 |
1,36 |
80 |
0,0132 |
|
|
0,37 |
1000 |
220 |
2,1 |
8,37 |
73 |
0,0132 |
|
|
МИ-41 |
1,6 |
2500 |
110 |
19,5 |
0,249 |
73 |
0,035 |
|
1,1 |
1500 |
110 |
13,0 |
0,67 |
74 |
0,035 |
|
|
0,76 |
1000 |
110 |
9,0 |
1,3 |
72 |
0,035 |
|
|
1,6 |
2500 |
220 |
9,5 |
0,93 |
73 |
0,035 |
|
|
1,1 |
1500 |
220 |
6,4 |
2,63 |
75 |
0,035 |
|
|
0,76 |
1000 |
220 |
4,5 |
5,32 |
72 |
0,035 |
|
|
МИ-42 |
3,2 |
2500 |
110 |
36,3 |
0,1 |
78 |
0,065 |
|
1,6 |
1500 |
110 |
18,2 |
0,32 |
78 |
0,065 |
|
|
1,1 |
1000 |
110 |
12,6 |
0,75 |
75 |
0,065 |
|
|
3,2 |
2500 |
220 |
18,0 |
0,376 |
79 |
0,065 |
|
|
1,6 |
1500 |
220 |
9,1 |
1,28 |
78 |
0,065 |
|
|
1,1 |
1600 |
220 |
6,3 |
2,95 |
75 |
0,065 |
|
|
Ми-51 |
5,5 |
2500 |
220 |
27,2 |
0,164 |
82 |
0,125 |
|
3,2 |
1500 |
220 |
17,1 |
0,46 |
82 |
0,125 |
|
|
1,6 |
1000 |
220 |
8,7 |
1,1 |
79 |
0,125 |
|
|
МИ-52 |
7,0 |
2500 |
220 |
37,0 |
0,088 |
84 |
0,15 |
|
4,5 |
1500 |
220 |
23,3 |
0,26 |
85 |
0,15 |
|
|
2,5 |
1000 |
220 |
13,1 |
0,569 |
82 |
0,15 |
Приложение 2
Технические данные двигателей серии МИ
|
Тип двига- теля |
Мощ- ность |
Ско- рость вращ. |
Напря- жение |
Ток якоря |
Сопрот цепи якоря |
КПД |
Момент инерц. |
|
Рн, кВт |
nн, об/мин |
Uн, В |
Iн, А |
Rд, Ом |
д, % |
Jд, кгм2 |
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
МИ-11 |
0,12 |
3000 |
60 |
2,87 |
0,46 |
62 |
0,0015 |
|
0,1 |
2000 |
60 |
2,27 |
0,94 |
63 |
0,0015 |
|
|
0,12 |
3000 |
100 |
1,53 |
1,48 |
62 |
0,0015 |
|
|
0,1 |
2000 |
110 |
1,22 |
3,60 |
63 |
0,0015 |
|
|
МИ-12 |
0,2 |
3000 |
60 |
4,57 |
0,23 |
66 |
0,002 |
|
0,12 |
2000 |
60 |
2,72 |
0,52 |
64 |
0,002 |
|
|
0,2 |
3000 |
110 |
2,46 |
0,765 |
66 |
0,002 |
|
|
0,12 |
2000 |
110 |
1,46 |
1,74 |
64 |
0,002 |
|
|
МИ-21 |
0,25 |
3000 |
60 |
5,6 |
0,284 |
67 |
0,0035 |
|
0,2 |
2000 |
60 |
4,3 |
0,645 |
68 |
0,0035 |
|
|
0,25 |
3000 |
110 |
3,05 |
0,945 |
67 |
0,0035 |
|
|
0,2 |
2000 |
110 |
2,33 |
2,20 |
68 |
0,0035 |
|
|
МИ-22 |
0,37 |
3000 |
60 |
8,2 |
0,195 |
71 |
0,04 |
|
0,25 |
2000 |
60 |
5,5 |
0,360 |
75 |
0,004 |
|
|
0,12 |
1000 |
60 |
2,6 |
1,44 |
64 |
0,004 |
|
|
0,37 |
3000 |
110 |
4,4 |
0,546 |
72 |
0,004 |
|
|
0,25 |
2000 |
110 |
2,9 |
1,29 |
70 |
0,004 |
|
|
0,12 |
1000 |
110 |
1,4 |
4,58 |
64 |
0,004 |
|
|
МИ-31 |
0,45 |
3000 |
60 |
10,3 |
0,204 |
68 |
0,009 |
|
0,37 |
2000 |
60 |
8,2 |
0,405 |
70 |
0,009 |
|
|
0,45 |
3000 |
110 |
5,6 |
0,585 |
68 |
0,009 |
|
|
0,2 |
1000 |
60 |
4,4 |
1,32 |
66 |
0,009 |
|
|
0,37 |
2000 |
110 |
4,4 |
1,16 |
70 |
0,009 |
|
|
0,2 |
1000 |
110 |
2,4 |
3,9 |
66 |
0,009 |
3.4.
Составление передаточных функций
элементов
следящей системы
3.4.1. Исполнительный двигатель
Передаточная функция исполнительного двигателя по углу поворота имеет вид (если пренебречь индуктивностью цепи якоря)
где К>д> - коэффициент усиления двигателя, рад/В.с : К>д> = >н / >U>н ;>
> >Т>д - >электромеханическая постоянная времени:
В последней формуле =1,2 - постоянный коэффициент;
J>c> - cуммарный момент инерции, приведенный к валу двигателя.

 ;
;
3.4.2. Электромашинный усилитель
Передаточная функция ЭМУ
К>эму> - коэффициент усиления ЭМУ по напряжению
U>эму> - напряжение на выходе ЭМУ ; U>у> - напряжение обмотки управления ЭМУ -
Р>у>, R>у> - соответственно мощность и сопротивление обмотки управления ЭМУ,
Т>у>, Т>кз> - постоянные времени обмотки управления и короткозамкнутой обмотки якоря ЭМУ.
3.4.3. Усилитель
Усилитель (на функциональной схеме - У) служит для согласования выходного сигнала ЦАП с входным сопротивлением обмотки управления ЭМУ. Его можно считать безинерционным звеном с передаточной функцией W>у>(Р) = К>у> .
В расчетах принять К>у = >1> .>
3.4.4. Фазовый детектор
Передаточная функция фазового детектора W>фд >(P) = К>фд>,
где К>фд>=1 - коэффициент усиления фазового детектора.
3.4.5. Измерительное устройство
Передаточная функция измерительного устройства W>иу>(Р)=К>иу>,
где К>иу>=1 - коэффициент усиления измерительного устройства.
Приложение 1 (продолжение)
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
17 |
250 |
180 |
1,0 |
0,04 |
0,01 |
25 |
|
18 |
300 |
150 |
1,5 |
0,02 |
0,02 |
25 |
|
19 |
350 |
150 |
0,5 |
0,02 |
0,05 |
30 |
|
20 |
50 |
70 |
2,5 |
0,05 |
0,01 |
30 |
|
21 |
100 |
50 |
3,0 |
0,05 |
0,01 |
20 |
|
22 |
150 |
100 |
2,5 |
0,08 |
0,05 |
25 |
|
23 |
200 |
120 |
1,5 |
0,05 |
0,02 |
30 |
|
24 |
70 |
25 |
0,75 |
0,025 |
0,01 |
20 |
|
25 |
120 |
50 |
0,8 |
0,01 |
0,02 |
20 |
|
26 |
110 |
60 |
0,5 |
0,04 |
0,01 |
25 |
|
27 |
300 |
120 |
0,5 |
0,01 |
0,02 |
25 |
|
28 |
150 |
100 |
1,0 |
0,02 |
0,05 |
30 |
|
29 |
100 |
70 |
1.2 |
0,05 |
0,02 |
20 |
|
30 |
75 |
50 |
1,0 |
0,01 |
0,05 |
25 |
Время регулирования tр: для студентов группы АТ-1 tp=2 c.,
АТ-2 tp=2,5 c., АТ-3 tp=3 c.
Приложение 1
Варианты
исходных данных для проектирования
следящей
системы
|
Вари- |
Статиче- Мос, Нм |
Момент Jо, кгм2 |
Максим. о max, с-1 |
Максим. о max, с-2 |
Максим. Xmax, рад. |
Максим. max, % |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
1 |
50 |
20 |
0,5 |
0,02 |
0,01 |
20 |
|
2 |
100 |
70 |
1,0 |
0,06 |
0,02 |
25 |
|
3 |
200 |
100 |
1,5 |
0,06 |
0,01 |
25 |
|
4 |
300 |
90 |
2,0 |
0,08 |
0,02 |
30 |
|
5 |
350 |
120 |
2,5 |
0,08 |
0,02 |
30 |
|
6 |
50 |
30 |
3,0 |
0,05 |
0,03 |
35 |
|
7 |
100 |
60 |
0,5 |
0,02 |
0,01 |
20 |
|
8 |
150 |
90 |
1,0 |
0,06 |
0,02 |
20 |
|
9 |
200 |
80 |
1,5 |
0,05 |
0,02 |
25 |
|
10 |
250 |
120 |
2,0 |
0,08 |
0,03 |
25 |
|
11 |
300 |
100 |
0,5 |
0,02 |
0,01 |
30 |
|
12 |
350 |
100 |
1,0 |
0,04 |
0,02 |
30 |
|
13 |
50 |
50 |
0,5 |
0,05 |
0,01 |
35 |
|
14 |
100 |
100 |
0,2 |
0,08 |
0,02 |
35 |
|
15 |
150 |
120 |
0,5 |
0,02 |
0,05 |
35 |
|
16 |
200 |
150 |
1,0 |
0,03 |
0,02 |
20 |
3.4.6. Редуктор
Передаточная функция редуктора W>ред>(Р)=К>ред>=1/i>р> .
Структурная схема нескорректированной следящей системы представлена на рис.2.
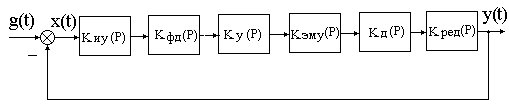
Рис.2. Структурная схема нескорректированной следящей системы
3.5. Расчет последовательного непрерывного
корректирующего звена методом ЛАЧХ
Построение логарифмической амплитудно-частотной характеристики (ЛАЧХ) последовательного корректирующего звена проводится в такой последовательности.
1. Строится ЛАЧХ заданной (нескорректированной) системы.
2. Строится желаемая ЛАЧХ по заданным показателям качества переходного процесса.
3. Строится ЛАЧХ последовательного корректирующего звена путем графического вычитания ЛАЧХ заданной системы из желаемой ЛАЧХ.
4. По виду ЛАЧХ корректирующего звена определяется его передаточная функция (непрерывная).
3.5.1. Построение ЛАЧХ заданной системы
по виду передаточной функции
Передаточную функцию разомкнутой системы нужно представить в виде произведения передаточных функций типовых динамических звеньев (ограничимся случаем, когда в системе отсутствуют
колебательные звенья и звенья с запаздыванием). Например, пусть передаточная функция разомкнутой системы имеет вид:

Построение удобно проводить в такой последовательности.
1. Определить сопрягающие частоты >i>=1/Т>i> и отложить их по оси абсцисс в логарифмическом масштабе (Т>i> - постоянные времени передаточной функции К>з>(Р) ).
2. Отложить точку A1 с координатами >A1>=1c-1 и L(>A1>)=20lgК>з> ( см. рис. 3). Через точку A1 провести прямую с наклоном -20 дБ/дек. Построенная таким образом прямая линия совпадает с ЛАЧХ при частотах, меньших первой сопрягающей частоты (по порядку их расположения на оси частот слева направо).
3. На частоте сопряжения >i >характеристика меняет свой наклон либо на +20 дБ/дек, если постоянная времени Т>i=>1/>i >находится в числителе исходной передаточной функции, либо на -20 дБ/дек, если постоянная времени Т>i >находится в знаменателе передаточной функции.
Для исследования системы на устойчивость по амплитудно-фазовому критерию устойчивости с помощью логарифмических частотных характеристик необходимо кроме ЛАЧХ построить еще логарифмическую фазо-частотную характеристику (ЛФЧХ). По оси абсцисс откладывается частота в логарифмическом масштабе (используют ту же ось частот, что и для построения ЛАЧХ), а по оси ординат откладывают аргумент амплитудно-фазовой характеристики в градусах или в радианах в линейном масштабе. Для рассматриваемого примера рассчитывается по формуле
arctgT>у>arctgT>кз>arctgT>д>гр.) .
такту k моменты времени.
Из последнего уравнения выразим U[k]:
U[k]=(S0X[k-n]+S1X[k-n+1]+...+SmX[k-n+m] - (7)
- G0U[k-n]-G1U[k-n+1]-. . .-Gn-1U[k-1])/Gn
Уравнение (7) является рекуррентным уравнением, описывающим алгоритм работы цифрового корректирующего устройства. По нему должна быть составлена программа работы данного устройства.
3.10.
Разработка принципиальной схемы
цифровой
следящей системы
На принципиальной схеме должны быть изображены сельсин-датчик и сельсин-трансформатор, фазовый детектор, АЦП, цифровой вычислитель, ЦАП, электронный усилитель мощности, ЭМУ, двигатель, редуктор.
Проводить расчет электронных схем и изображать их развернутые принципиальные схемы не требуется.
Л И Т Е Р А Т У Р А
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1972. 766 с.
2. Батоврин А.А., Дашевский П.Г. и др. Цифровые следящие системы судовой автоматики. Л. : Судостроение, 1972. 445 с.
Если в результате моделирования дискретной системы качество переходного процесса окажется хуже заданного, то нужно ввести в корректирующее звено изменения. Изменения нужно вносить в непрерывную передаточную функцию, пересчитывая ее затем в дискретную. При высокой колебательности процесса можно попробовать изменить в ту или иную сторону наименьшие постоянные времени знаменателя. В некоторых случаях дает хороший результат отбрасывание наименьших постоянных времени в числителе и знаменателе.
3.9. Получение рекуррентного уравнения
цифрового корректирующего звена
Пусть дискретная передаточная функция имеет вид (3). Уравнение (3) запишем следующим образом:
 ,
(5)
,
(5)
где U(Z) - Z-изображение выходной величины цифрового корректирующего устройства;
X(Z) - Z-изображение входной величины корректирующего устройства.
Перепишем уравнение (5), избавившись от знаменателя в левой и правой частях:
U(Z)(G0+G1Z+...+GnZn)=X(Z)(S0+S1Z+...+SmZm) . (6)
Раскрыв скобки, поделив левую и правую части уравнения на Zn и перейдя от изображений к оригиналам, получим:
G0U[k-n]+G1U[k-n+1]+...+GnU[k]=
=S0X[k-n]+S1X[k-n+1]+...+SmX[k-n+m]
здесь X[k] ,
U[k] - значения входной и выходной величин
в произвольный такт времени k , X[k-1],
X[k-2] . . ., U[k-1], U[k-2] . . . - значения входной
и выходной величин в предшествующие
3.5.2. Построение желаемой ЛАЧХ
При построении желаемой ЛАЧХ выделяют три области: область низких частот, область средних частот и область высоких частот. Вид ЛАЧХ в каждой из областей по разному влияет на качество системы. В области низких частот вид ЛАЧХ определяет точность работы системы в установившихся режимах. Область средних частот определяет динамические свойства системы (быстродействие, колебательность). Вид ЛАЧХ в области высоких частот практически мало влияет на качество системы.
Построение желаемой ЛАЧХ удобно начинать с области средних частот в такой последовательности.
По заданным величинам >max > и t>р> определяем с помощью табл. 1 частоту среза >с> .
Например, пусть задано, что >max>=30 t>р>=1,5 с. Из табл.1 для >max >=30% определяем t>р>>с>/=3,2, откуда следует:
>с=> 3,26c-1 .
Таблица 1
|
>max >, % |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
|
t>р>>с>/ |
5 |
4,4 |
4 |
3,6 |
3,2 |
3 |
2,8 |
|
L>1>, дБ |
18 |
15 |
13,5 |
12 |
11 |
10,5 |
10 |
|
, гр |
85 |
80 |
65 |
55 |
45 |
40 |
35 |
Наносим на ось абсцисс частоту среза >с >и проводим через нее прямую линию с наклоном -20 дБ/дек (рис.3).
Частота
>2>
, ограничивающая область средних частот
желаемой ЛАЧХ слева определяется
величиной отрезка L>1>,
которая может быть найдена в зависимости
от заданной величины >max>
из табл.1. Частота >3>,
ограничивающая область средних частот
справа, определяется величиной отрезка
L>2>,
при этом
 .
.
В области высоких частот желаемую ЛАЧХ нужно строить в виде прямолинейных отрезков с наклоном, кратным -20 дБ/дек. (т.е. -40, - 60, -80 и т.д.) , таким образом, чтобы разность характеристик желаемой и заданной в пределе при составляла прямую линию, параллельную оси частот.
В области низких частот желаемая ЛАЧХ строится следующим образом. По заданной величине коэффициента усиления системы К>с>=>оmax>/x>max>
определяем величину L>A2>=20LgK>c> и отмечаем на чертеже точку A>2> c координатами >A2>=1 c-1 и L>A2> (cм. рис.3). Через точку A>2> проводим прямую линию с наклоном -20 дБ/дек.
От точки М, ограничивающей область средних частот слева, проводим прямую линию с наклоном -40дБ/дек до пересечения с низкочастотной частью желаемой ЛАЧХ.
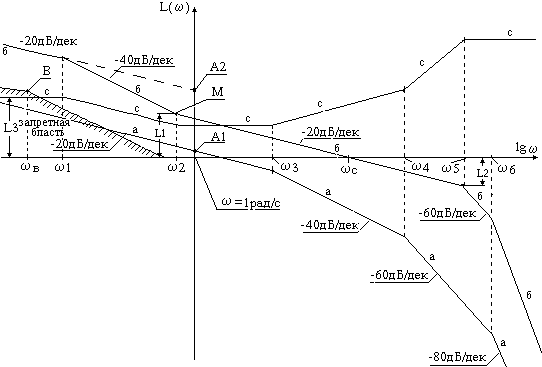
Рис.3. а-а-а . . . - ЛАЧХ заданной (неизменяемой части) системы;
б-б-б . . . - ЛАЧХ желаемая;
с-с-с . . . - ЛАЧХ последовательного корректирующего звена
Порядок полинома знаменателя n должен быть не меньше порядка полинома числителя и не больше 5.
В программу нужно ввести также период квантования по времени Т0. Как уже было сказано ранее, чем меньше Т0 , тем более дискретная система приближается по своим свойствам к непрерывной. Однако при слишком малых значениях Т0 процессор в реальной системе может не успевать выполнять все необходимые вычисления. Кроме того, при уменьшении Т0 увеличивается число шагов переходного процесса. Так как вычисления проводятся по рекуррентным формулам, неизбежные ошибки вычислений накапливаются от шага к шагу и при чрезмерно большом числе шагов ошибка вычислений может превысить допустимую величину (система может оказаться неустойчивой, либо с неудовлетворительным качеством переходного процесса). В силу сказанного, Т0 не должно быть слишком мало. Рекомендуется выбирать Т0 в пределах (0,1 - 0,01)/c , где с - частота среза скорректированной системы.
3.8. Моделирование цифровой следящей системы
После того как дискретная передаточная функция определена можно приступить к моделированию цифровой следящей системы. Рекомендуется проводить моделирование, используя специализированные пакеты программ: MATLAB-simulink, либо ДИСПАС.
В пакете MATLAB-simulink дискретное звено, также как и непрерывные звенья, набирается по коэффициентам передаточной функции. Никаких дополнительных элементов, учитывающих преобразование сигналов из непрерывных в дискретные и наоборот, вводить в модель не требуется. Все преобразования в системе производятся автоматически.
В пакете ДИСПАС дискретное звено вводится тремя элементами: преобразователем непрерывный сигнал - код, вычислителем и преобразователем код - непрерывный сигнал.
Вычислитель задается рекуррентным уравнением, которое нужно определить из дискретной передаточной функции (см. п.3.9).
ДИСПАС позволяет моделировать дискретное звено, порядок которого не более 3.
Если окажется , что показатели качества скорректированной системы хуже заданных, то нужно вносить в коррекцию соответствующие изменения. Так, если перерегулирование оказалось больше заданного, то нужно увеличивать отрезки L1 и L2. Если время регулирования оказалось больше заданного, то нужно увеличивать частоту среза желаемой ЛАЧХ.
3.7. Определение дискретной передаточной функции
корректирующего звена
Для получения дискретной передаточной функции звена по его непрерывной передаточной функции рекомендуется воспользоваться билинейным преобразованием. Для этого нужно в непрерывную передаточную функцию корректирующего звена сделать подстановку

Для проведения подобных расчетов можно воспользоваться программой (см. приложение 4), написанной на языке BASIC.
Искомая
передаточная функция в общем случае
имеет вид:
 (3)
(3)
C помощью программы определяются коэффициенты S>i> и G>i > передаточной функции (3).
Непрерывная передаточная функция может быть задана либо в форме (2) постоянными времени числителя и знаменателя и коэффициентом усиления звена, либо в форме дробно-рациональной функции коэффициентами полиномов числителя и знаменателя:
 (4)
(4)
Если
в задании на разработку следящей системы
указана максимально допустимая ошибка
слежения Хmax
при условии, что входной сигнал может
изменяться с максимальной угловой
скоростью max
и с максимальным угловым ускорением
max
, то для выполнения этих требований
необходимо, чтобы желаемая ЛАЧХ не
попадала бы в запретную область.
Запретная область строится следующим образом. Отмечаем на чертеже точку В с координатами:
 .
.
От
точки В вправо проводим прямую линию с
наклоном
-40 дБ/дек, а влево - прямую
линию с наклоном -20 дБ/дек.
Если ЛАЧХ, построенная по заданному коэффициенту Кс , попадает в запретную область, то это означает, что при данном коэффициенте Кс заданная точность слежения не может быть обеспечена и нужно его увеличить, т.е. поднять желаемую ЛАЧХ так, чтобы она не попадала в запретную область.
По виду ЛАЧХ желаемой можно записать передаточную функцию непрерывной скорректированной (желаемой) системы. Для рассматриваемого примера (кривая б-б-б... рис.3) передаточная функция имеет вид:
 (1)
(1)
Для определения передаточной функции желаемой системы можно воспользоваться программой , приведенной в приложении 4. Программа написана на языке BASIC и позволяет найти постоянные времени T1, Т2, Т3 желаемой передаточной функции по показателям качества m и tp. При этом передаточная функция записывается в виде
 (2)
(2)
Типовая желаемая ЛАЧХ, по которой записана передаточная функция (2), показана на рис. 4.
Показатель степени k определяется наклоном заданной ЛАЧХ в области высоких частот.
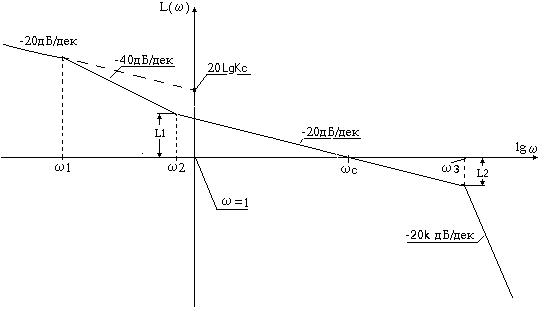
Рис 4. Типовая ЛАЧХ желаемой следящей системы
Для обеспечения заданных показателей качества переходного процесса скорректированная система должна обладать определенным запасом устойчивости по фазе. Необходимая величина запаса устойчивости по фазе (для заданной величины максимального перерегулирования указана в табл.1. После построения желаемой ЛАЧХ нужно рассчитать и построить ЛФЧХ скорректированной системы и определить
3.5.3. Расчет последовательного корректирующего звена
ЛАЧХ последовательного непрерывного корректирующего звена строится путем графического вычитания из ЛАЧХ желаемой ЛАЧХ заданной части системы ( на рис.3 - линия с-с-с...).
По
виду ЛАЧХ нужно записать передаточную
функцию непрерывного последовательного
корректирующего звена. Для ЛАЧХ
с-с-с...
на рис.3 передаточная функция имеет вид:
 (2)
(2)
Коэффициент К>кор> определяется из соотношения: 20lgК>кор>=L>3> .
Эту же передаточную функцию можно получить, если передаточную функцию желаемую К>ж>(Р) поделить на передаточную функцию заданной части системы К>з>(Р).
3.6. Моделирование следящей системы с непрерывным
последовательным корректирующим звеном
Для того, чтобы
убедиться, что коррекция системы
проведена правильно и скорректированная
система имеет показатели качества
переходного процесса не хуже заданных,
нужно провести моделирование. Рекомендуется
моделировать скорректированную систему
на ПЭВМ, используя специализированные
пакеты программ ДИСПАС или
Matlab
simulink.