Упругие волны
УПРУГИЕ ВОЛНЫ
§ 1. Распространение волн в упругой среде
Если в каком-либо месте упругой (твердой, жидкой или газообразной) среды возбудить колебания ее частиц, то вследствие взаимодействия между частицами это колебание будет распространяться в среде от частицы к частице с некоторой скоростью υ. Процесс распространения колебаний в пространстве называется волной.
Частицы среды, в которой распространяется волна, не вовлекаются волной в поступательное движение, они лишь совершают колебания около своих положений равновесия. В зависимости от направления колебаний частиц по отношению к направлению, в котором распространяется волна, различают продольные и поперечные волны. В продольной волне частицы среды колеблются вдоль направления распространения волны. В поперечной волне частицы среды колеблются в направлениях, перпендикулярных к направлению распространения волны. Упругие поперечные волны могут возникнуть лишь в среде, обладающей сопротивлением сдвигу. Поэтому в жидкой и газообразной средах возможно возникновение только продольных волн. В твердой среде возможно возникновение как продольных, так и поперечных волн.
Н
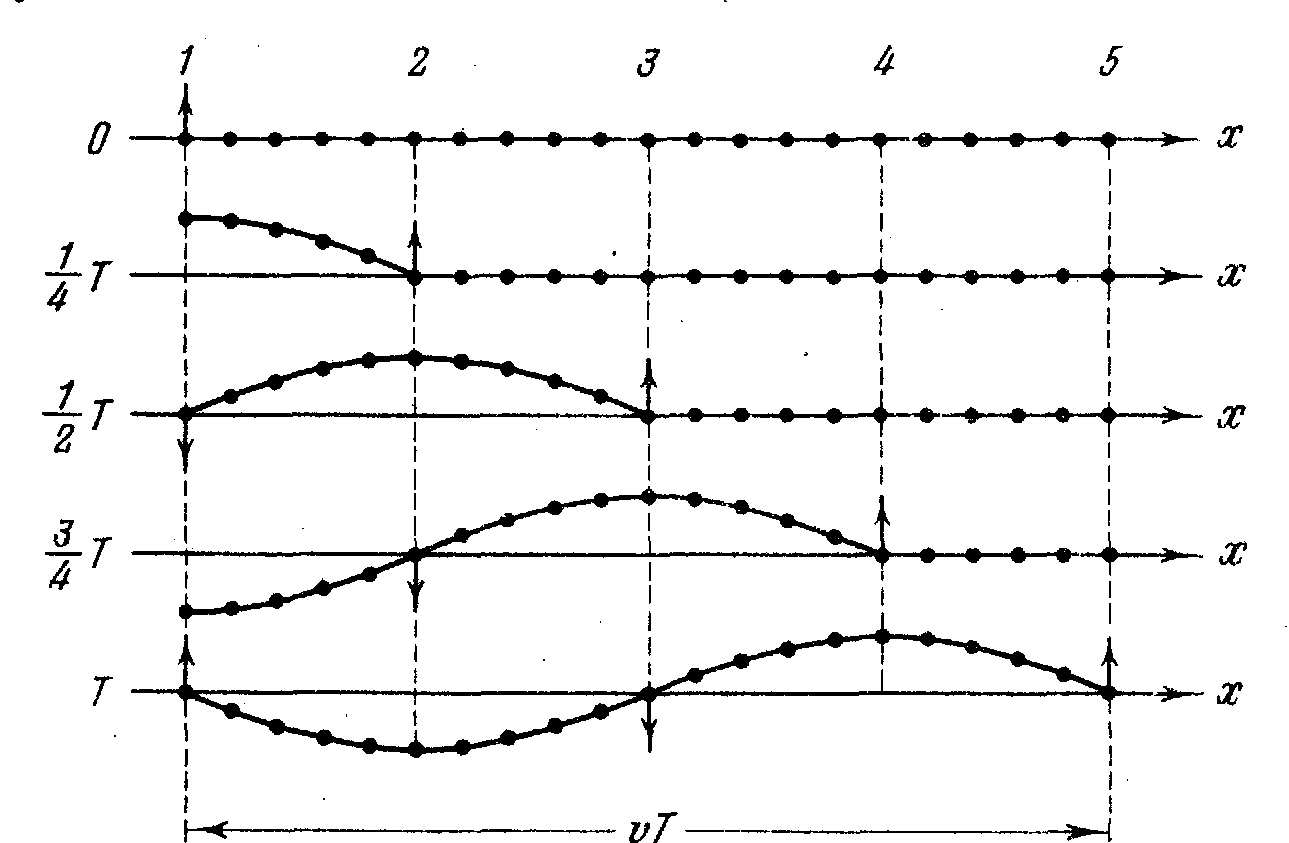
Рис. 1.1
Рис. 1.2
 а
рис. 1.1
показано движение частиц при распространении
в среде поперечной волны. Номерами
1, 2 и т. д. обозначены
частицы, отстоящие друг от друга на
расстояние, равное ¼
υT,
т. е. на расстояние, проходимое волной
за четверть периода колебаний, совершаемых
частицами. В момент времени, принятый
за нулевой, волна, распространяясь вдоль
оси слева направо, достигла частицы
1,
вследствие чего частица начала смещаться
из положения равновесия вверх, увлекая
за собой следующие частицы. Спустя
четверть периода частица
1
достигает крайнего верхнего положения;
одновременно начинает смещаться из
положения равновесия частица
2.
По прошествии еще четверти периода
первая частица будет проходить положение
равновесия, двигаясь в направлении
сверху вниз, вторая
частица достигнет крайнего верхнего
положения, а третья частица начнет
смещаться вверх из положения равновесия.
В момент времени, равный Т,
первая частица закончит полный цикл
колебания и будет находиться в таком
же состоянии движения, как и в начальный
момент. Волна к моменту времени Т,
пройдя путь
υT,
достигнет частицы
5.
а
рис. 1.1
показано движение частиц при распространении
в среде поперечной волны. Номерами
1, 2 и т. д. обозначены
частицы, отстоящие друг от друга на
расстояние, равное ¼
υT,
т. е. на расстояние, проходимое волной
за четверть периода колебаний, совершаемых
частицами. В момент времени, принятый
за нулевой, волна, распространяясь вдоль
оси слева направо, достигла частицы
1,
вследствие чего частица начала смещаться
из положения равновесия вверх, увлекая
за собой следующие частицы. Спустя
четверть периода частица
1
достигает крайнего верхнего положения;
одновременно начинает смещаться из
положения равновесия частица
2.
По прошествии еще четверти периода
первая частица будет проходить положение
равновесия, двигаясь в направлении
сверху вниз, вторая
частица достигнет крайнего верхнего
положения, а третья частица начнет
смещаться вверх из положения равновесия.
В момент времени, равный Т,
первая частица закончит полный цикл
колебания и будет находиться в таком
же состоянии движения, как и в начальный
момент. Волна к моменту времени Т,
пройдя путь
υT,
достигнет частицы
5.
Н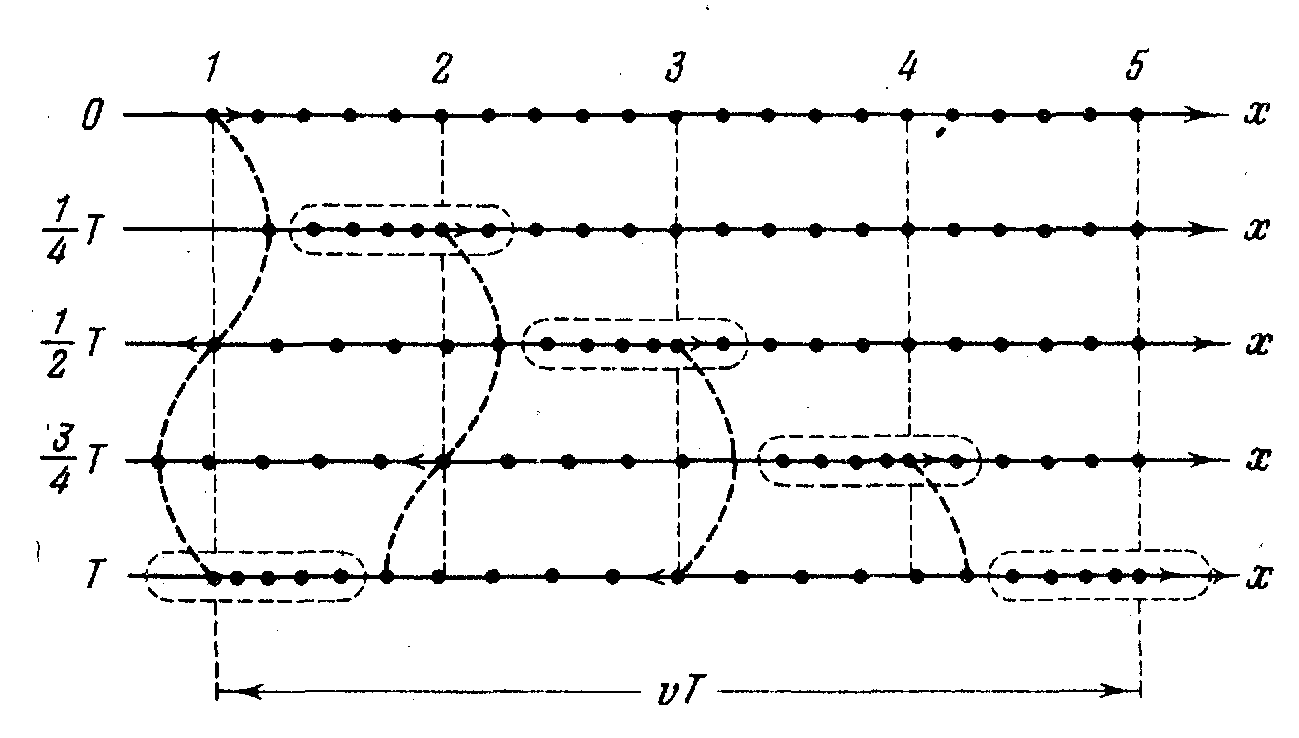 а
рис. 1.2
показано движение частиц при распространении
в среде продольной волны. Все рассуждения,
касающиеся поведения частиц в
поперечной волне, могут быть отнесены
и к
данному случаю с заменой смещений вверх
и вниз смещениями вправо и
влево. Из рисунка видно,
что при распространении
продольной волны в среде создаются
чередующиеся сгущения и разрежения
частиц (места сгущения частиц обведены
на рисунке пунктиром), перемещающиеся
в направлении распространения волны
со скоростью υ.
а
рис. 1.2
показано движение частиц при распространении
в среде продольной волны. Все рассуждения,
касающиеся поведения частиц в
поперечной волне, могут быть отнесены
и к
данному случаю с заменой смещений вверх
и вниз смещениями вправо и
влево. Из рисунка видно,
что при распространении
продольной волны в среде создаются
чередующиеся сгущения и разрежения
частиц (места сгущения частиц обведены
на рисунке пунктиром), перемещающиеся
в направлении распространения волны
со скоростью υ.
На рис. 1.1 и 1.2 показаны колебания частиц, положения равновесия которых лежат на оси х. В действительности колеблются не только частицы, расположенные вдоль оси х, а совокупность частиц, заключенных в некотором объеме. Распространяясь от источника колебаний, волновой процесс охватывает все новые и новые части пространства. Геометрическое место точек, до которых доходят колебания к моменту времени t, называется фронтом волны (или волновым фронтом). Фронт волны представляет собой ту поверхность, которая отделяет часть пространства, уже вовлеченную в волновой процесс, от области, в которой колебания еще не возникли.
Геометрическое место точек, колеблющихся в одинаковой фазе, называется волновой поверхностью. Волновую поверхность можно провести через любую точку пространства, охваченного волновым процессом. Следовательно, волновых поверхностей существует бесконечное множество, в то время как волновой фронт каждый момент времени только один. Волновые поверхности остаются неподвижными. Волновой фронт все время перемещается.
Волновые поверхности могут быть любой формы. В простейших случаях они имеют форму плоскости или сферы. Соответственно волна в этих случаях называется плоской или сферической. В плоской волне волновые поверхности представляют собой множество параллельных друг другу плоскостей, в сферической волне — множество концентрических сфер.
Рассмотрим случай, когда плоская волна распространяется вдоль оси х. Тогда все точки среды, положения равновесия которых имеют одинаковую координату х (но различные значения координат y и z), колеблются в одинаковой фазе.
Н
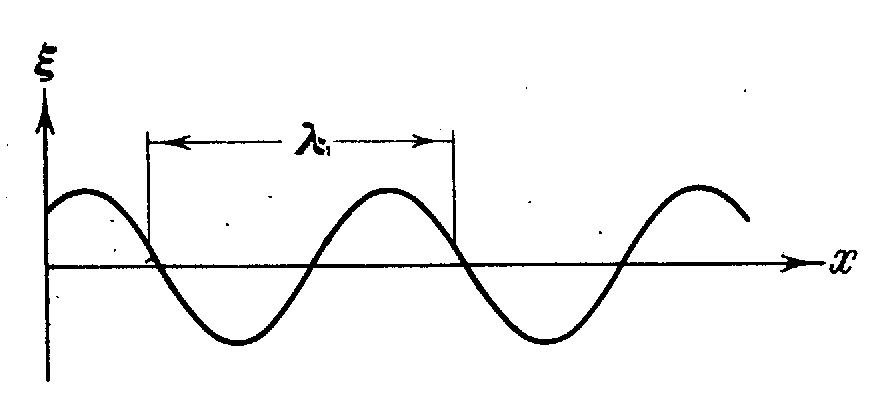
Рис. 1.3
 а
рис.1.3 изображена
кривая, которая дает смещение
из положения равновесия
точек с различными x
в некоторый момент времени. Не следует
воспринимать этот рисунок как зримое
изображение волны. На рисунке показан
график функции (х,
t) для
некоторого фиксированного момента
времени 1.
С течением времени график перемещается
вдоль оси х.
Такой график можно строить как для
продольной, так и для поперечной волны.
В обоих случаях он выглядит одинаково.
а
рис.1.3 изображена
кривая, которая дает смещение
из положения равновесия
точек с различными x
в некоторый момент времени. Не следует
воспринимать этот рисунок как зримое
изображение волны. На рисунке показан
график функции (х,
t) для
некоторого фиксированного момента
времени 1.
С течением времени график перемещается
вдоль оси х.
Такой график можно строить как для
продольной, так и для поперечной волны.
В обоих случаях он выглядит одинаково.
Р
(1.1)
асстояние λ, на которое распространяется волна за время, равное периоду колебаний частиц среды, называется длиной волны. Очевидно, чтоλ =υT,
где υ — скорость волны, T — период колебаний. Длину волны можно определить также как расстояние между ближайшими точками среды, колеблющимися с разностью фаз, равной 2 (см. рис. 1.3).
З
(1.2)
 аменив
в соотношении (1.1)
T
через 1/v
(v
— частота колебаний),
получим
аменив
в соотношении (1.1)
T
через 1/v
(v
— частота колебаний),
получим
λv = υ.
К
Рис. 2.1
этой формуле можно прийти также из следующих соображений. За одну секунду источник волн совершает v колебаний, порождая в среде при каждом колебании один «гребень» и одну «впадину» волны. К тому моменту, когда источник будет завершать v-e колебание, первый «гребень» успеет пройти путь υ. Следовательно, v «гребней» и «впадин» волны должны уложиться на длине υ.
§ 2. Уравнения плоской и сферической волн
Уравнением волны называется выражение, которое дает смещение колеблющейся частицы как функцию ее координат х, у, z и времени t:
(2.1)
= (х, у, z, t)(имеются в виду координаты равновесного положения частицы). Эта функция должна быть периодической как относительно времени t, так и относительно координат х, y, z. Периодичность по времени вытекает из того, что описывает колебания частицы с координатами х, у, z. Периодичность по координатам следует из того, что точки, отстоящие друг от друга на расстояние λ, колеблются одинаковым образом.
Найдем вид функции , в случае плоской волны, предполагая, что колебания носят гармонический характер. Для упрощения направим оси координат так, чтобы ось х совпала с направлением распространения волны. Тогда волновые поверхности будут перпендикулярными к оси х и, поскольку все точки волновой поверхности колеблются одинаково, смещение будет зависеть только от х и t: = (х, t). Пусть колебания точек, лежащих в плоскости х = 0 (рис. 2.1), имеют вид
(х, t) = a cos (t + ).
Найдем вид колебания точек в плоскости, соответствующей произвольному значению х. Для того чтобы пройти путь от плоскости х = 0 до этой плоскости, волне требуется время = x/υ (υ – скорость распространения волны). Следовательно, колебания частиц, лежащих в плоскости х, будут отставать по времени на от колебаний частиц в плоскости х = 0, т. е. будут иметь вид
(х, t) = a cos [ ( t − ) + ] = a cos [ ( t − x/υ ) + ].
Итак, уравнение плоской волны (и продольной, и поперечной), распространяющейся в направлении оси х, выглядит следующим образом:
(2.2)
= a cos [ ( t − x/υ ) + ]Величина a представляет собой амплитуду волны. Начальная фаза волны определяется выбором начал отсчета х и t. При рассмотрении одной волны начала отсчета времени и координаты обычно выбираются так, чтобы была равной нулю. При совместном рассмотрении нескольких волн сделать так, чтобы для всех них начальные фазы равнялись пулю, как правило, не удается.
З
(2.3)
афиксируем какое-либо значение фазы, стоящей в уравнении (2.2), положив ( t − x/υ ) + = const
Э
dt –
1

υ
dx
=
0,
то выражение определяет связь между временем t и тем местом х, в котором фаза имеет зафиксированное значение. Вытекающее из него значение dx/dt дает скорость, с которой перемещается данное значение фазы. Продифференцировав выражение (2.3), получимо
υ.
υ.
 ткуда
ткуда
(2.4)
Таким образом, скорость распространения волны υ в уравнении (2.2) есть скорость перемещения фазы, в связи с чем ее называют фазовой скоростью.
С
(2.5)
огласно (2.4) dx/dt > 0. Следовательно, уравнение (2.2) описывает волну, распространяющуюся в сторону возрастания х. Волна, распространяющаяся в противоположном направлении, описывается уравнением = a cos [ ( t + x/υ ) + ]
Д
– υ,
ействительно, приравняв константе фазу волны (2.5) и продифференцировав получившееся равенство, придем к соотношениюиз которого следует, что волна (2.5) распространяется в сторону убывания х.
У
λ
k =
2π
(2.6)
,
равнению плоской волны можно придать симметричный относительно х и t вид. Для этого введем величинук
υ
k =
ω
(2.7)
оторая называется волновым числом. Умножив числитель и знаменатель выражения (2.6) на частоту v, можно представить волновое число в виде(
(2.8)
см. формулу
(1.2)). Раскрыв в
(2.2) круглые скобки и
приняв во внимание
(2.7), придем к следующему
уравнению плоской волны, распространяющейся
вдоль оси х:
= a cos ( t + kx + )
Уравнение волны, распространяющейся в сторону убывания х, отличается от (2.8) только знаком при члене kx.
При выводе формулы (2.8) мы предполагали, что амплитуда колебаний не зависит от х. Для плоской волны это наблюдается в том случае, когда энергия волны не поглощается средой. При распространении в поглощающей энергию среде интенсивность волны с удалением от источника колебаний постепенно уменьшается – наблюдается затухание волны. Опыт показывает, что в однородной среде такое затухание происходит по экспоненциальному закону: a = a>0 >e–γx. Соответственно уравнение плоской волны имеет следующий вид:
(2.9)
= a>0 >e–γx cos ( t + kx + )(a>0> – амплитуда в точках плоскости х = 0).
Теперь найдем уравнение сферической волны. Всякий реальный источник волн обладает некоторой протяженностью. Однако если ограничиться рассмотрением волны на расстояниях от источника, значительно превышающих его размеры, то источник можно считать точечным. В изотропной и однородной среде волна, порождаемая точечным источником, будет сферической. Допустим, что фаза колебаний источника равна t + . Тогда точки, лежащие на волновой поверхности радиуса r, будут колебаться с фазой
( t – r/ υ ) = t – kr +
(
(2.10)
a
чтобы пройти путь r, волне требуется время τ = r/υ). Амплитуда колебаний в этом случае, даже если энергия волны не поглощается средой, не остается постоянной — она убывает с расстоянием от источника по закону 1/r. Следовательно, уравнение сферической волны имеет вид
r
=
cos ( t
+ kx +
)
где a — постоянная величина, численно равная амплитуде на расстоянии от источника, равном единице. Размерность а равна размерности колеблющейся величины, умноженной на размерность длины. Для поглощающей среды в формулу (2.10) нужно добавить множитель e–γx.
Напомним, что в силу сделанных предположений уравнение (2.10) справедливо только при r, значительно превышающих размеры источника. При стремлении r к нулю выражение для амплитуды обращается в бесконечность. Этот абсурдный результат объясняется неприменимостью уравнения для малых r.
§ 3. Уравнение плоской волны, распространяющейся в произвольном направлении
Н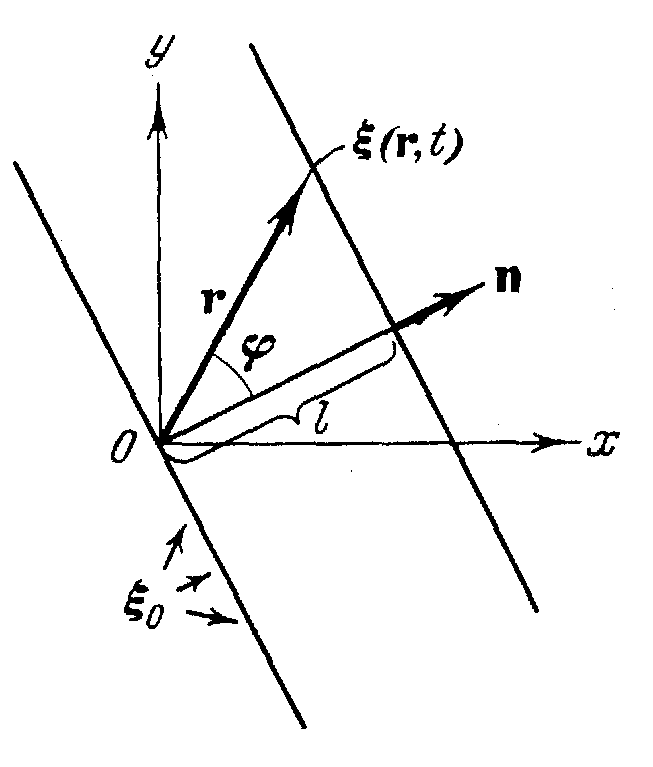 айдем
уравнение плоской волны, распространяющейся
в направлении, образующем с осями
координат x,
y,
z
углы α,
β,
γ. Пусть
колебания в плоскости, проходящей
через начало координат (рис.
3.1), имеют вид
айдем
уравнение плоской волны, распространяющейся
в направлении, образующем с осями
координат x,
y,
z
углы α,
β,
γ. Пусть
колебания в плоскости, проходящей
через начало координат (рис.
3.1), имеют вид
(3.1)
= a cos ( t + )В
υ
ω
(3.2)
озьмем волновую поверхность (плоскость), отстоящую от начала координат на расстояние l. Колебания в этой плоскости будут отставать от колебаний (3.1) на время τ =l/υ:
Рис. 3.1
=
a
cos [ (
t
−
) +
] = a
cos ( t
− kl
+
).
(k = ω/υ; см. формулу (2.7)).
Выразим l через радиус-вектор точек рассматриваемой поверхности. Для этого введем единичный вектор n нормали к волновой поверхности. Из рис. 3.1 видно, что скалярное произведение n на радиус-вектор r любой из точек поверхности равно l:
nr = r cos φ= l.
З
(3.3)
аменим в (3.2) l через nr: = a cos ( t − knr + )
В
(3.4)
екторk = kn,
р
(3.5)
авный по модулю волновому числу k = 2π/λ и имеющий направление нормали к волновой поверхности, называется волновым вектором. Таким образом, уравнение (3.3) можно представить в виде ( r, t ) = a cos ( t − kr + )
Мы получили уравнение плоской незатухающей волны, распространяющейся в направлении, определяемом волновым вектором k. Для затухающей волны нужно добавить в уравнение множитель e–γl = e–γ nr.
Функция (3.5) дает отклонение от положения равновесия точки с радиусом-вектором r в момент времени l (r определяет равновесное положение точки). Чтобы перейти от радиуса-вектора точки к ее координатам х, у, z, выразим скалярное произведение kr через компоненты векторов по координатным осям:
kr = k>x>x + k>y>y + k>z>z.
Т
(3.6)
(3.7)
огда уравнение плоской волны примет вид (x, y, z, t ) = a cos ( t − k>x>x – k>y>y – k>z>z + )
З
2π
cos α,
λ
k>y> =
2π
cos β,
λ
k>z> =
2π
cos γ.
десьФ
λ
k>x> =
ункция
(3.6) дает отклонение точки
с координатами х,
у,
z
в момент времени
t.
В случае, когда n
совпадает с e>x>,
k>x>
= k,
k>y>>
>= k>z>
= 0 (и
уравнение (3.6)
переходит в (2.8).
Очень удобна запись уравнения плоской
волны в виде
= Re aei (ωt-kr+α)
З
(3.9)
(3.8)
(3.10)
нак Re обычно опускают, подразумевая, что берется только вещественная часть соответствующего выражения. Кроме того, вводят комплексное числоâ = aeiα,
которое называют комплексной амплитудой. Модуль этого числа дает амплитуду, а аргумент – начальную фазу волны Таким образом, уравнение плоской незатухающей волны можно представить в виде
= âei (ωt-kr)
Преимущества такой записи выяснятся в дальнейшем.
§ 4. Волновое уравнение
Уравнение любой волны является решением дифференциального уравнения, называемого волновым. Чтобы установить вид волнового уравнения, сопоставим вторые частные производные по координатам и времени от функции (3.6), описывающей плоскую волну. Продифференцировав эту функцию дважды по каждой из переменных, получим
С



ложение
производных по координатам дает

(4.1)
(4.2)
(4.3)
(4.4)
(4.5)
(4.6)
(4.7)
С опоставив
эту сумму с производной по времени и
заменив k2/ω2
через 1/υ2
(см. (2.7)),
получим уравнение
опоставив
эту сумму с производной по времени и
заменив k2/ω2
через 1/υ2
(см. (2.7)),
получим уравнение
Э то
и есть волновое уравнение. Его можно
записать в виде
то
и есть волновое уравнение. Его можно
записать в виде
υ
где Δ – оператор Лапласа.
Легко убедиться в том, что волновому уравнению удовлетворяет не только функция (3.6), но и любая функция вида
f(x, y, z, t)=f(t − k>x>x – k>y>y – k>z>z + )
Д
 ействительно,
обозначив выражение, стоящее в скобках
в правой части (4.4),
через ς,
имеем
ействительно,
обозначив выражение, стоящее в скобках
в правой части (4.4),
через ς,
имеем
Аналогично
Подстановка выражений (4.5) и (4.6) в уравнение (4.2) приводит к выводу, что функция (4.4) удовлетворяет волновому уравнению, если положить υ=ω/k.
В сякая
функция, удовлетворяющая уравнению
вида (4.2), описывает
некоторую волну, причем корень квадратный
из величины, обратной коэффициенту
при ,
дает фазовую скорость
этой волны.
сякая
функция, удовлетворяющая уравнению
вида (4.2), описывает
некоторую волну, причем корень квадратный
из величины, обратной коэффициенту
при ,
дает фазовую скорость
этой волны.
О тметим,
что для плоской волны, распространяющейся
вдоль оси х,
волновое уравнение имеет вид
тметим,
что для плоской волны, распространяющейся
вдоль оси х,
волновое уравнение имеет вид
υ
§ 5. Скорость упругих волн в твердой среде
П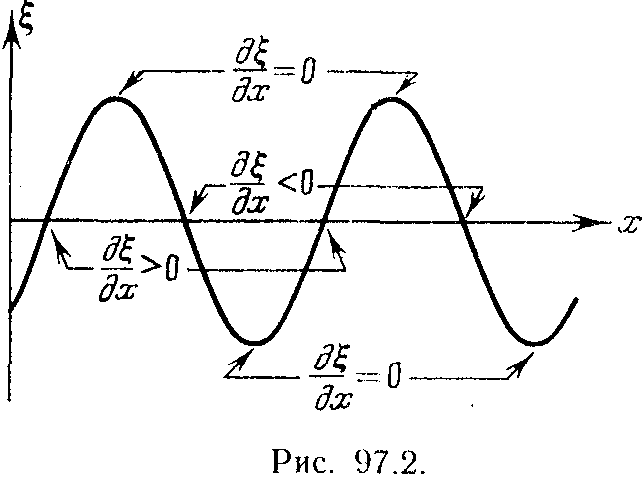
Рис. 5.2
усть в направлении оси х распространяется продольная плоская волна. Выделим в среде цилиндрический объем с площадью основания S и высотой Δx (рис. 5.1). Смещения ξ частиц с разными х в каждый момент времени оказываются различными (см. рис. 1.3, на котором изображено ξ в функции от x). Если основание цилиндра с координатой х имеет в некоторый момент времени смещение ξ, то смещение основания с координатой x+Δx будет ξ+Δξ. Поэтому рассматриваемый объем деформируется – он получает удлинение (алгебраическая величина, соответствует сжатию цилиндра) или относительное удлинение. Величина дает среднюю деформацию цилиндра. Вследствие того, что ξ меняется с изменением х не по линейному закону, истинная деформация в разных сечениях цилиндра будет неодинаковой. Чтобы получить деформацию ε в сечении х, нужно устремить Δx к нулю. Таким образом,
(5.1)
(5.2)
(5.3)
(5.4)
(символ частной производной взят потому, что зависит не только от x, но и от t).
Н аличие
деформации растяжения свидетельствует
о существовании нормального напряжения
σ, при малых
деформациях пропорционального
величине деформации. Согласно формуле
(14.6) 1-го тома
аличие
деформации растяжения свидетельствует
о существовании нормального напряжения
σ, при малых
деформациях пропорционального
величине деформации. Согласно формуле
(14.6) 1-го тома
(E – модуль Юнга среды). Отметим, что относительная деформация , а следовательно, и напряжение σ в фиксированный момент времени зависят от х (рис. 5.2). Там, где отклонения частиц от положения равновесия максимальны, деформация и напряжение равны нулю. В местах, где частицы проходят через положение равновесия, деформация и напряжение достигают максимального значения, причем положительные и отрицательные деформации (т. е. растяжения и, сжатия) чередуются друг с другом. В соответствии с этим, как уже отмечалось в §1. продольная волна состоит из чередующихся разрежений и сгущений среды.
Обратимся
снова к цилиндрическому объему,
изображенному на
рис. 5.1,
и напишем для него уравнение движения.
Полагая Δx
очень малым, проекцию
ускорения на ось x
можно считать для всех точек цилиндра
одинаковой и равной
. Масса цилиндра равна
ρSΔx,
где ρ
– плотность недеформированной
среды. Проекция на ось
x силы,
действующей на цилиндр, равна произведению
площади основания цилиндра
S на разность нормальных
напряжений в сечениях (x+Δx+ξ+Δξ)
и (x+ξ):
Значение
производной в
сечении x+δ
можно для малых δ
представить с большой точностью в виде


где под подразумевается значение второй частной производной ξ по х в сечении х.
Ввиду малосги величин Δx, ξ и Δξ произведем в выражении (5.3) преобразование (5.4):
(5.5)
(
<
< Δx
относительное удлинение при упругих деформациях бывает много меньше единицы. Поэтому Δξ , так что слагаемым Δξ в сумме Δx+Δξ, можно пренебречь).
П одставив
найденные значения массы, ускорения и
силы в уравнение второго закона Ньютона,
получим
одставив
найденные значения массы, ускорения и
силы в уравнение второго закона Ньютона,
получим
Наконец, сократив на SΔx, придем к уравнению
(5.6)
которое представляет собой волновое уравнение, написанное для случая, когда ξ не зависит от у и z. Сопоставление уравнений (4.7) и (5.6) дает, что
υ =
(5.7)
Т аким
образом, фазовая скорость продольных
упругих волн равна корню квадратному
из модуля Юнга, деленного на плотность
среды. Аналогичные вычисления для
поперечных волн приводят к выражению
аким
образом, фазовая скорость продольных
упругих волн равна корню квадратному
из модуля Юнга, деленного на плотность
среды. Аналогичные вычисления для
поперечных волн приводят к выражению
υ =
(5.8)
(6.1)
где G – модуль сдвига.
§ 6. Энергия упругой волны
Пусть в некоторой среде распространяется в направлении оси х плоская продольная волна
= a cos ( t − kx + )
В
 ыделим
в среде элементарный объем ΔV,
настолько малый, чтобы скорость движения
и деформацию во всех точках этого объема
можно было считать одинаковыми и равными,
соответственно, и
.
ыделим
в среде элементарный объем ΔV,
настолько малый, чтобы скорость движения
и деформацию во всех точках этого объема
можно было считать одинаковыми и равными,
соответственно, и
.
В ыделенный
нами объем обладает кинетической
энергией
ыделенный
нами объем обладает кинетической
энергией
(6.2)
(ρΔV – масса объема, – его скорость).
Согласно формуле (25.4) 1-го тома рассматриваемый объем обладает также потенциальной энергией упругой деформации
(ε = – относительное удлинение цилиндра, Е — модуль Юнга среды). Заменим в соответствии с (5.7) модуль Юнга через ρυ2 (ρ – плотность среды, υ – фазовая скорость волны). Тогда выражение для потенциальной энергии объема ΔV примет вид
(6.3)
(6.4)
Выражения (6.2) и (6.3) в сумме дают полную энергию

Р азделив
эту энергию на объем
ΔV,
в котором она содержится, получим
плотность энергии
азделив
эту энергию на объем
ΔV,
в котором она содержится, получим
плотность энергии
w
Д ифференцирование
уравнения (6.1)
один раз по t,
другой раз по x
дает
ифференцирование
уравнения (6.1)
один раз по t,
другой раз по x
дает
Подставив эти выражения в формулу (6.4) и приняв во внимание, что k2υ2 = ω2, получим
(6.5)

В случае поперечной волны для плотности энергии получается такое же выражение.
И
(6.6)
з (6.5) следует, что плотность энергии в каждый момент времени в разных точках пространства различна. В одной и той же точке плотность энергии изменяется со временем по закону квадрата синуса. Среднее значение квадрата синуса равно 1/2. Соответственно среднее по времени значение плотности энергии в каждой точке среды равноПлотность энергии (6.5) и ее среднее значение (6.6) пропорциональны плотности среды ρ, квадрату частоты ω и квадрату амплитуды волны а. Подобная зависимость имеет место не только для незатухающей плоскости волны, но и для других видов волн (плоской затухающей, сферической и т. д.).
И
(6.7)
так, среда, в которой распространяется волна, обладает дополнительным запасом энергии. Эта энергия доставляется от источника колебаний в различные точки среды самой волной; следовательно, волна переносит с собой энергию. Количество энергии, переносимое волной через некоторую поверхность в единицу времени, называется потоком энергии через эту поверхность. Если через данную поверхность переносится за время dt энергия dW, то поток энергии Φ равенПоток энергии – скалярная величина, размерность которой равна размерности энергии, деленной на размерность времени, т. е. совпадает с размерностью мощности. В соответствии с этим Φ измеряется в ваттах, эрг/с и т. п.
П оток
энергии в разных точках среды может
быть различной интенсивности. Для
характеристики течения энергии в разных
точках пространства вводится векторная
величина, называемая плотностью потока
энергии. Эта величина численно равна
потоку энергии через единичную площадку,
помещенную в данной точке перпендикулярно
к направлению, в котором переносится
энергия. Направление вектора плотности
потока энергии совпадает с направлением
переноса энергии.
оток
энергии в разных точках среды может
быть различной интенсивности. Для
характеристики течения энергии в разных
точках пространства вводится векторная
величина, называемая плотностью потока
энергии. Эта величина численно равна
потоку энергии через единичную площадку,
помещенную в данной точке перпендикулярно
к направлению, в котором переносится
энергия. Направление вектора плотности
потока энергии совпадает с направлением
переноса энергии.
Пусть через площадку , перпендикулярную к направлению распространения волны, переносится за время Δt энергия ΔW. Тогда плотность потока энергии равна
(6.8)
(см.
(6.7)). Через площадку
(рис.
6.1) будет перенесена за
время Δt
энергия ΔW,
заключенная в объеме цилиндра с
основанием и
высотой υΔt
(υ – фазовая скорость волны). Если размеры
цилиндра достаточно малы (за счет малости
и
Δt)
для того, чтобы плотность
энергии во всех точках цилиндра можно
было считать одинаковой, то ΔW
можно найти как произведение плотности
энергии w
на объем цилиндра, равный
υΔt:
Подставив это выражение в формулу (6.8), получим для плотности потока энергии:
(6.9)
(6.10)
(6.11)
(6.12)
Наконец, введя вектор v, модуль которого равен фазовой скорости волны, а направление совпадает с направлением распространения волны (и переноса энергии), можно написать
j = wv
М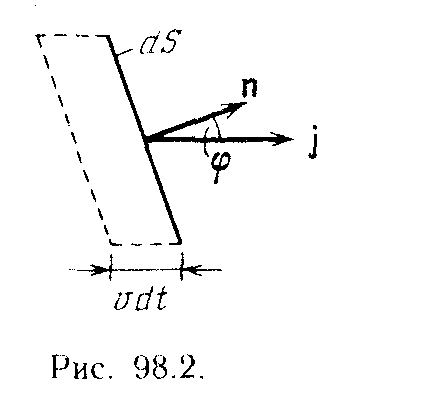
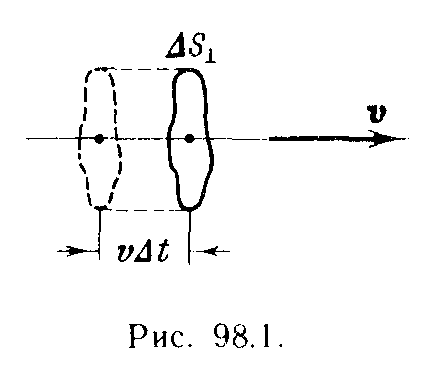
Рис.6.1
Рис.6.2
ы получили выражение для вектора плотности потока энергии. Этот вектор был впервые введен в рассмотрение выдающимся русским физиком Н. А. Умовым и называется вектором Умова. Вектор (6.10), как и плотность энергии w, различен в разных точках про-
с транства,
а в данной точке изменяется со временем
по закону квадрата синуса. Его среднее
значение равно
транства,
а в данной точке изменяется со временем
по закону квадрата синуса. Его среднее
значение равно
(см. (6.6)). Выражение (6.11), так же как и (6.6), справедливо для волны любого вида (сферической, затухающей и т. д.).
Отметим, что, когда говорят об интенсивности волны в данной точке, то имеют в виду среднее по времени значение плотности потока энергии, переносимой волной.
Зная j во всех точках произвольной поверхности S, можно вычислить поток энергии через эту поверхность. С этой целью разобьем поверхность на элементарные участки dS. За время dt через площадку dS пройдет энергия dW, заключенная в изображенном на рис. 6.2 косом цилиндре. Объем этого цилиндра равен dV = υ dt dS cosφ . В нем содержится энергия dW = w dV = w υ dtdS cos φ (w — мгновенное значение плотности энергии в том месте, где расположена площадка dS). Приняв во внимание, что
w υ dS cos φ = j dS cos φ = j dS
(dS = n dS; см. рис. 6.2), можно написать: dW = j dS dt. Отсюда для потока энергии dΦ через площадку dS получается формула
(
(6.13)
(6.14)
ср. с формулой (11.5)). Полный поток энергии через поверхность равен сумме элементарных потоков (6.12):В соответствии с (11.7) можно сказать, что поток энергии равен потоку вектора j через поверхность S.
З аменив
в формуле (6.13)
вектор j
его средним по времени значением, получим
среднее значение Φ:
аменив
в формуле (6.13)
вектор j
его средним по времени значением, получим
среднее значение Φ:
Вычислим среднее значение потока энергии через произвольную волновую поверхность незатухающей сферической волны. В каждой точке этой поверхности векторы j и dS совпадают по направлению. Кроме того, модуль вектора j для всех точек поверхности одинаков. Следовательно,
( r
— радиус волновой
поверхности). Согласно
(6.11) .
Таким образом,
r
— радиус волновой
поверхности). Согласно
(6.11) .
Таким образом,
(a>r> – амплитуда волны на расстоянии r от источника). Поскольку энергия волны не поглощается средой, средний поток энергии через сферу любого радиуса должен иметь одинаковое значение, т. е. должно выполняться условие
О тсюда
следует, что амплитуда а,
незатухающей сферической волны обратно
пропорциональна расстоянию
r
от источника волны (см.
формулу (5.10)).
Соответственно средняя плотность потока
энергии обратно
пропорциональна квадрату расстояния
от источника.
тсюда
следует, что амплитуда а,
незатухающей сферической волны обратно
пропорциональна расстоянию
r
от источника волны (см.
формулу (5.10)).
Соответственно средняя плотность потока
энергии обратно
пропорциональна квадрату расстояния
от источника.
В случае плоской затухающей волны амплитуда убывает с расстоянием по закону a = = a>0 >e-γx (см. (2.9)). Соответственно средняя плотность потока энергии (т. е. интенсивность волны) убывает по
(6.15)
Здесь = 2γ – величина, называемая коэффициентом поглощения волны. Она имеет размерность, обратную размерности длины. Легко сообразить, что величина, обратная , равна расстоянию, на котором интенсивность волны уменьшается в е раз.
§ 7. Стоячие волны
Если в среде распространяется одновременно несколько волн, то колебания частиц среды оказываются геометрической суммой колебаний, которые совершали бы частицы при распространении каждой из волн в отдельности. Следовательно, волны просто накладываются одна на другую, не возмущая друг друга. Это утверждение называется принципом суперпозиции (наложения) волн.
В случае, когда колебания, обусловленные отдельными волнами в каждой из точек среды, обладают постоянной разностью фаз, волны называются когерентными. При сложении когерентных волн возникает явление интерференции, заключающееся в том, что колебания в одних точках усиливают, а в других точках ослабляют друг друга.
Очень важный случай интерференции наблюдается при наложении двух встречных плоских волн с одинаковой амплитудой. Возникающий в результате колебательный процесс называется стоячей волной. Практически стоячие волны возникают при отражении волн от преград. Падающая на преграду волна и бегущая ей навстречу отраженная волна, налагаясь друг на друга, образуют стоячую волну.
Напишем уравнения двух плоских волн, распространяющихся вдоль оси х в противоположных направлениях:
>1> = a cos ( t − kx + >1> ), >2> = a cos ( t + kx + >2> ).
С
(7.1)
(7.2)
ложив вместе эти уравнения и преобразовав результат по формуле для суммы косинусов, получимУравнение (7.1) есть уравнение стоячей волны. Чтобы упростить его, выберем начало отсчета х так, чтобы разность α>1> – α>2> стала равной нулю, а начало отсчета t — так, чтобы оказалась равной нулю сумма α>1> – α>2>. Кроме того, заменим волновое число k его значением 2π/λ. Тогда уравнение (7.1) примет вид
Из (7.2) видно, что в каждой точке стоячей волны происходят колебания той же частоты, что и у встречных волн, причем амплитуда зависит от х:
В точках, координаты которых удовлетворяют условию 2πx/λ = nπ (n N) – (3.3), амплитуда колебаний достигает максимального значения. Эти точки называются пучностями стоячей волны. Из (3.3) получаются значения координат пучностей:

(7.4)
Следует иметь в виду, что пучность представляет собой не одну единственную точку, а плоскость, точки которой имеют значения координаты x, определяемые формулой (7.4).
В точках, координаты которых удовлетворяют условию
амплитуда колебаний обращается в нуль. Эти точки называются узлами стоячей волны. Точки среды, находящиеся в узлах, колебаний не совершают. Координаты узлов имеют значения
(7.5)
Узел, как и пучность, представляет собой не одну точку, а плоскость, точки которой имеют значения координаты х, определяемые формулой (7.5).
И
2acos(2x/)
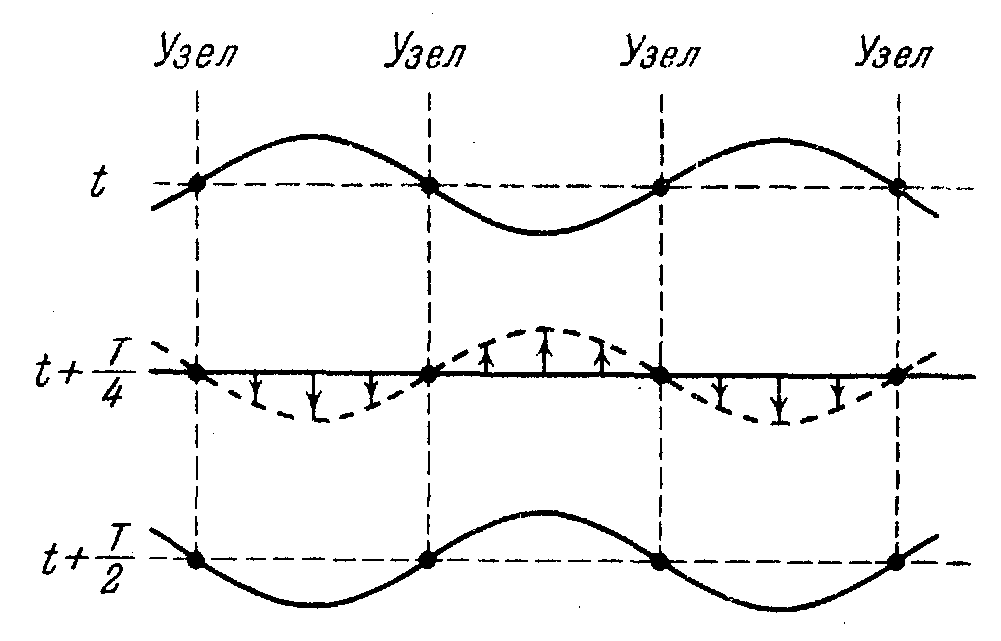
з формул (7.4) и (7.5) следует, что расстояние между соседними пучностями, так же как и расстояние между соседними узлами, равно /2. Пучности и узлы сдвинуты друг относительно друга на четверть длины волны.Обратимся снова к уравнению (7.2). Множитель при переходе через нулевое значение меняет знак. В соответствии с этим фаза колебаний по разные стороны от узла отличается на . Это означает, что точки, лежащие по разные стороны от узла, колеблются в противофазе. Все точки, заключенные между двумя соседними узлами, колеблются синфазно. На рис. 7.1 дан ряд «моментальных фотографий» отклонений точек от положения равновесия. Первая «фотография» соответствует моменту, когда отклонения достигают наибольшего абсолютного значения. Последующие «фотографии» сделаны с интервалами в четверть периода. Стрелками показаны скорости частиц.
П
 родифференцировав
уравнение (7.2) один раз по
t,
а другой раз по х,
найдем выражения для скорости частиц
и для деформации
среды :
родифференцировав
уравнение (7.2) один раз по
t,
а другой раз по х,
найдем выражения для скорости частиц
и для деформации
среды :
(7.6)
(7.7)
Уравнение (7.6) описывает стоячую волну скорости, а (7.7) – стоячую волну деформации.
Н
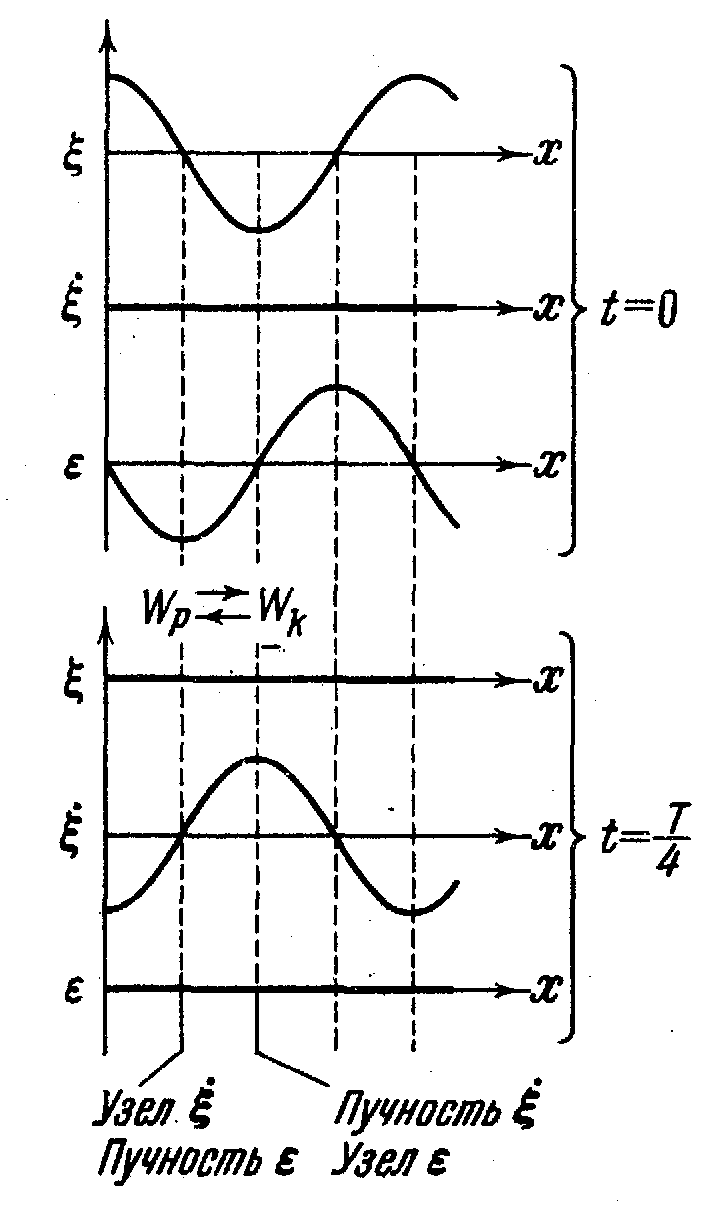
Рис.7.2
Рис.7.1
а рис. 7.2 сопоставлены «моментальные фотографии» смещения, скорости и деформации для моментов времени 0 и T/4. Из графиков видно, что узлы и пучности скорости совпадают с узлами и пучностями смещения; узлы же и п учности
деформации совпадают соответственно
с пучностями и узлами смещения. В то
время как
и ε достигают максимальных значений,
обращается в нуль, и наоборот.
Соответственно дважды за период
происходит превращение энергии стоячей
волны то полностью в потенциальную,
сосредоточенную в основном вблизи узлов
волны (где находятся пучности
деформации), то полностью в кинетическую,
сосредоточенную в основном вблизи
пучностей волны (где находятся пучности
скорости). В результате происходит
переход энергии от каждого узла к
соседним с ним пучностям и обратно.
Средний по времени поток энергии в любом
сечении волны равен нулю.
учности
деформации совпадают соответственно
с пучностями и узлами смещения. В то
время как
и ε достигают максимальных значений,
обращается в нуль, и наоборот.
Соответственно дважды за период
происходит превращение энергии стоячей
волны то полностью в потенциальную,
сосредоточенную в основном вблизи узлов
волны (где находятся пучности
деформации), то полностью в кинетическую,
сосредоточенную в основном вблизи
пучностей волны (где находятся пучности
скорости). В результате происходит
переход энергии от каждого узла к
соседним с ним пучностям и обратно.
Средний по времени поток энергии в любом
сечении волны равен нулю.