Расчет настроек автоматического регулятора 2
Министерство общего и профессионального образования РФ
Пермский государственный технический университет
Березниковский филиал
Курсовая работа
по предмету: Автоматизация технологических процессов и
производств.
Тема: Расчет настроек автоматического регулятора.
Выполнил: ст-т гр. АТП-93
Панкина Н.В.
Проверил: Бильфельд Н. В.
г. Березники, 1998
Содержание.
1. Координаты кривых разгона.
1.1 Схемы для Ремиконта.
1.2 Координаты и график кривой разгона по возмущению.
1.3 Координаты и график кривой разгона по заданию.
1.4 Координаты и график кривой разгона по управлению.
2. Интерполяция по 3 точкам.
2.1 Линейное сглаживание и график кривой разгона по возмущению.
2.2 Линейное сглаживание и график кривой разгона по заданию.
2.3 Линейное сглаживание и график кривой разгона по управлению.
3. Нормирование кривых разгона.
3.1 Нормирование кривой разгона по возмущению.
3.2 Нормирование кривой разгона по заданию.
3.3 Нормирование кривой разгона по управлению.
4. Аппроксимация методом Симою.
4.1 По возмущению.
4.2 По заданию.
4.3 По управлению.
5. Проверка аппроксимации методом Рунге - Кутта.
5.1 По возмущению.
5.2 По заданию.
5.3 По управлению.
5.4 Сравнение передаточных функций.
5.5 Сравнение кривых разгона.
6. Расчет одноконтурной АСР методом Роточа.
Координаты кривой разгона
С помощью программы связи ЭВМ с контроллером снимаем координаты кривой разгона.
Для этого сначала поочередно программируем Ремиконт:
1. по возмущению
2. по заданию
3. по управлению
 объект 2-го
порядка
объект 2-го
порядка
 01 1.1 21 1.2
21 1.3
01 1.1 21 1.2
21 1.3
 313
311 312
313
311 312





 1 11 1 11
1 11
1 11 1 11
1 11
Н1=-100 Н1=-100 Н1=-100
Н2=100 Н2=100 Н2=100
к6= к6=1 к6=1
Т1= Т1= Т1= по заданию
Т1= Т1= Т1= по возмущению

Объект 3-го порядка с запаздыванием по управлению
 01 1.1 21 1.2 21 1.3
21 1.4 26 1.5
01 1.1 21 1.2 21 1.3
21 1.4 26 1.5
 315 311 312
313 314
315 311 312
313 314

 1 11 1 11 1
11 1 11 1 11
1 11 1 11 1
11 1 11 1 11
 Т1= Т1= Т1=
Т1= Т1=
Т1= Т1= Т1=
Т1= Т1=
В программе тренды меняя задание добиваемся устойчивости систем.
После того как системы установились приступаем к проведению эксперемента. Для этого устанавливаем алгоблок 11 с которого будем снимать кривую разгона, алгоблок 11 на который будем подавать скачек, амплитуду скачка 10 и интервал времени 0,5.
После просмотра полученных точек кривых разгона удаляем одинаковые.
И строим соответствующие графики.
Координаты и график кривой разгона по возмущению.
-
1
0,0000
30,0000
2
1,0000
30,2000
3
2,0000
31,5000
4
3,0000
32,6000
5
4,0000
33,7000
6
5,0000
35,2500
7
6,0000
36,1000
8
7,0000
36,8500
9
8,0000
37,4500
10
9,0000
38,2000
11
10,0000
38,5500
12
11,0000
38,8500
13
12,0000
39,2000
14
13,0000
39,4000
15
14,0000
39,5500
16
15,0000
39,6500
17
16,0000
39,7500
18
17,0000
39,8000
19
18,0000
39,8500
20
19,0000
39,9000
21
20,0000
39,9500
22
21,0000
39,9500
23
22,0000
39,9500
24
23,0000
40,0000
Координаты и график кривой разгона по заданию.
-
1
0,0000
50,0000
2
1,0000
50,1500
3
2,0000
51,0000
4
3,0000
51,8000
5
4,0000
52,6500
6
5,0000
53,5000
7
6,0000
54,7000
8
7,0000
55,4000
9
8,0000
56,1000
10
9,0000
56,9000
11
10,0000
57,4000
12
11,0000
57,8000
13
12,0000
58,1500
14
13,0000
58,6000
15
14,0000
58,8500
16
15,0000
59,0500
17
16,0000
59,2500
18
17,0000
59,4000
19
18,0000
59,5000
20
19,0000
59,6500
21
20,0000
59,7000
22
21,0000
59,7500
23
22,0000
59,8000
24
23,0000
59,8500
25
24,0000
59,9000
26
25,0000
59,9000
27
26,0000
59,9500
28
27,0000
59,9500
29
28,0000
59,9500
30
29,0000
59,9500
31
30,0000
60,0000
Координаты и график кривой разгона по управлению.
-
1
0,0000
40,0000
21
20,0000
47,4000
2
1,0000
40,0000
22
21,0000
48,0000
3
2,0000
40,0000
23
22,0000
48,4500
4
3,0000
40,0000
24
23,0000
48,8000
5
4,0000
40,0000
25
24,0000
48,8000
6
5,0000
40,0000
26
25,0000
49,1000
7
6,0000
40,0000
27
26,0000
49,3500
8
7,0000
40,0000
28
27,0000
49,5000
9
8,0000
40,0000
29
28,0000
49,5000
10
9,0000
40,2500
30
29,0000
49,5000
11
10,0000
40,9000
31
30,0000
49,7000
12
11,0000
40,9000
32
31,0000
49,8000
13
12,0000
41,8000
33
32,0000
49,8000
14
13,0000
42,8500
34
33,0000
49,8500
15
14,0000
43,9500
35
34,0000
49,9000
16
15,0000
44,9500
36
35,0000
49,9500
17
16,0000
44,9500
37
36,0000
49,9500
18
17,0000
45,9000
38
37,0000
49,9500
19
18,0000
46,7500
39
38,0000
49,9500
20
19,0000
47,4000
40
39,0000
50,0000
Интерполяция по трем точкам.
В программе ASR, пользуясь пунктом “интерполировать по 3-м” поочередно считаем кривые разгона и строим соответствующий график.
Линейное сглаживание и график кривой разгона по возмущению.
-
1
0,0000
29,8167
2
1,0000
30,5667
3
2,0000
31,4333
4
3,0000
32,6000
5
4,0000
33,8500
6
5,0000
35,0167
7
6,0000
36,0667
8
7,0000
36,8000
9
8,0000
36,5000
10
9,0000
38,0667
11
10,0000
38,5333
12
11,0000
38,8667
13
12,0000
39,1500
14
13,0000
39,3833
15
14,0000
39,5333
16
15,0000
39,6500
17
16,0000
39,7333
18
17,0000
39,8000
19
18,0000
39,8500
20
19,0000
39,9000
21
20,0000
39,9333
22
21,0000
39,9500
23
22,0000
39,9667
2
4
23,0000
39,9917
Линейное сглаживание и график кривой разгона по заданию.
-
1
0,0000
49,8833
2
1,0000
50,3833
3
2,0000
50,9833
4
3,0000
51,8167
5
4,0000
52,6500
6
5,0000
53,6167
7
6,0000
54,5333
8
7,0000
55,4000
9
8,0000
56,1333
10
9,0000
56,8000
11
10,0000
57,3667
12
11,0000
57,7833
13
12,0000
58,1833
14
13,0000
58,5333
15
14,0000
58,8333
16
15,0000
59,0500
17
16,0000
59,2333
18
17,0000
59,3833
19
18,0000
59,5167
20
19,0000
59,6167
21
20,0000
59,7000
22
21,0000
59,7500
23
22,0000
59,8000
24
23,0000
59,8500
25
24,0000
59,8833
26
25,0000
59,9167
27
26,0000
59,9333
28
27,0000
59,9500
29
28,0000
59,9667
30
29,0000
59,9833
31
30,0000
59,9833
Линейное сглаживание и график кривой разгона по управлению.
-
1
0,0000
40,0000
21
20,0000
48,4167
2
1,0000
40,0000
22
21,0000
48,6833
3
2,0000
40,0000
23
22,0000
48,9000
4
3,0000
40,0000
24
23,0000
49,0833
5
4,0000
40,0000
25
24,0000
49,3167
6
5,0000
40,0000
26
25,0000
49,4500
7
6,0000
40,0000
27
26,0000
49,5333
8
7,0000
40,0000
28
27,0000
49,6000
9
8,0000
40,0833
29
28,0000
49,7000
10
9,0000
40,6833
30
29,0000
49,7667
11
10,0000
41,2000
31
30,0000
49,8167
12
11,0000
41,8500
32
31,0000
49,8500
13
12,0000
42,8667
33
32,0000
49,9000
14
13,0000
43,9167
34
33,0000
49,9333
15
14,0000
44,6167
35
34,0000
49,9500
16
15,0000
45,2667
36
35,0000
49,9500
17
16,0000
45,8667
37
36,0000
49,9667
18
17,0000
47,1833
38
37,0000
49,9917
19
18,0000
47,6000
39
38,0000
49,9917
20
19,0000
47,9500
40
39,0000
50,0000
Нормирование кривых разгона.
С помощью программы ASR в пункте нормировать последовательно производим нормирование сглаженных кривых и упорядочиваем время начиная с 0,0000, с шагом 1.0
Нормированная кривая разгона по возмущению.
-
1
0,0000
0,0000
2
1,0000
0,0737
3
2,0000
0,1589
4
3,0000
0,2735
5
4,0000
0,3964
6
5,0000
0,5111
7
6,0000
0,6143
8
7,0000
0,6863
9
8,0000
0,7551
10
9,0000
0,8108
11
10,0000
0,8567
12
11,0000
0,8894
13
12,0000
0,9173
14
13,0000
0,9402
15
14,0000
0,9550
16
15,0000
0,9664
17
16,0000
0,9746
18
17,0000
0,9812
19
18,0000
0,9861
20
19,0000
0,9910
21
20,0000
0,9943
22
21,0000
0,9959
23
22,0000
0,9975
2
4
23,0000
1,0000
Нормированная кривая разгона по заданию.
-
1
0,0000
0,0000
2
1,0000
0,0494
3
2,0000
0,1086
4
3,0000
0,1909
5
4,0000
0,2733
6
5,0000
0,3687
7
6,0000
0,4593
8
7,0000
0,5449
9
8,0000
0,6173
10
9,0000
0,6831
11
10,0000
0,7391
12
11,0000
0,7802
13
12,0000
0,8198
14
13,0000
0,8543
15
14,0000
0,8840
16
15,0000
0,9053
17
16,0000
0,9235
18
17,0000
0,9383
19
18,0000
0,9514
20
19,0000
0,9613
21
20,0000
0,9745
22
21,0000
0,9794
23
22,0000
0,9909
24
23,0000
0,9926
25
24,0000
0,9942
26
25,0000
0,9942
27
26,0000
0,9975
2
8
27,0000
1,0000
Нормированная кривая разгона по управлению.
-
1
0,0000
0,0000
21
20,0000
0,7606
2
1,0000
0,0000
22
21,0000
0,7957
3
2,0000
0,0000
23
22,0000
0,8424
4
3,0000
0,0000
24
23,0000
0,8691
5
4,0000
0,0000
25
24,0000
0,8907
6
5,0000
0,0000
26
25,0000
0,9091
7
6,0000
0,0000
27
26,0000
0,9324
8
7,0000
0,0000
28
27,0000
0,9458
9
8,0000
0,0083
29
28,0000
0,9541
10
9,0000
0,0384
30
29,0000
0,9608
11
10,0000
0,0684
31
30,0000
0,9708
12
11,0000
0,1201
32
31,0000
0,9775
13
12,0000
0,1852
33
32,0000
0,9825
14
13,0000
0,2869
34
33,0000
0,9858
15
14,0000
0,3920
35
34,0000
0,9908
16
15,0000
0,4621
36
35,0000
0,9942
17
16,0000
0,5271
37
36,0000
0,9958
18
17,0000
0,5872
38
37,0000
0,9958
19
18,0000
0,6689
39
38,0000
0,9975
20
19,0000
0,7189
40
39,0000
1,0000
Аппроксимация методом Симою.
С помощью программы ASR в пункту аппроксимации последовательно считаем площади каждой из кривой разгона для последующего получения уравнения передаточной функции.
Для кривой разгона по возмущению для объекта второго порядка получаем следующие данные:
Значения коэффициентов:
F1= 6.5614
F2= 11.4658
F3= -4.5969
F4= -1.1636
F5= 44.0285
F6= -120.0300
Ограничимся второй площадью. F1>F2, тогда передаточная функция по возмущению для объекта второго порядка имеет вид:
1
W(s)=---------------------------
2
11,4658s + 6.5614s + 1
Для кривой разгона по заданию для объекта второго порядка получаем следующие данные:
Значения коэффициентов:
F1= 9.5539
F2= 24.2986
F3= -16.7348
F4= -14.7318
F5= 329.7583
F6= -1179.3989
Ограничимся второй площадью , с учетом того что F1>F2. Тогда передаточная функция по управлению для объекта второго порядка имеет вид:
1
W(s)=----------------------------
2
24,2986s + 9.5539s +1
Для кривой разгона по заданию для объекта третьего порядка с запаздыванием получаем следующие данные:
Значения коэффициентов:
F1= 10.6679
F2= 38.1160
F3= 30.4228
F4= -46.5445
F5= 168.8606
F6= -33.3020
Ограничимся третьей площадью и учтем что каждая последующая площадь больше предыдущей. Тогда передаточная функция по заданию для объекта третьего порядка с запаздыванием имеет вид:
1
W(s)=----------------------------------------
3 2
30,4228s + 38.1160s + 10.7769 + 1
Проверка аппроксимации методом Рунге - Кутта.
В программе ASR в пункте передаточная функция задаем полученные передаточные функции. И затем строим графики экспериментальной и аналитической кривых разгона (по полученной передаточной функции).
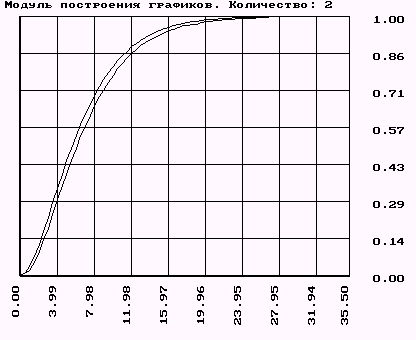
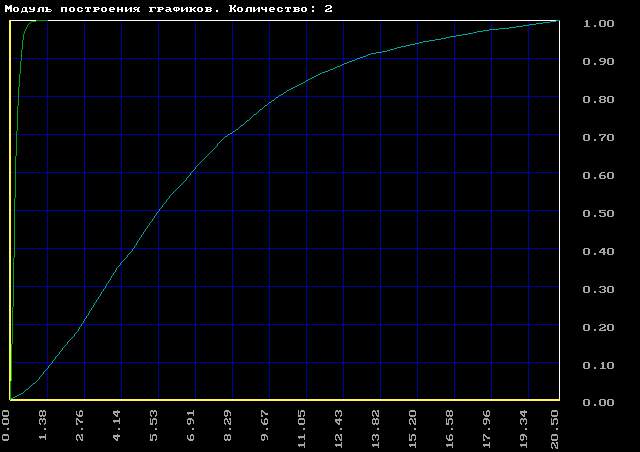
Для кривой разгона по возмущению.
Устанавливаем для проверки методом Рунге-Кутта конечное время 35,5с, шаг 0,5с.
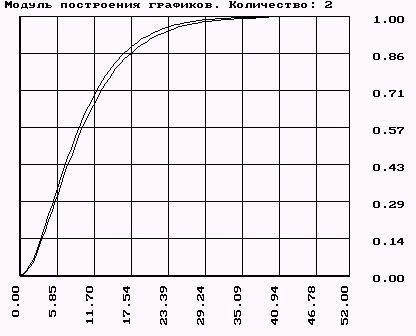
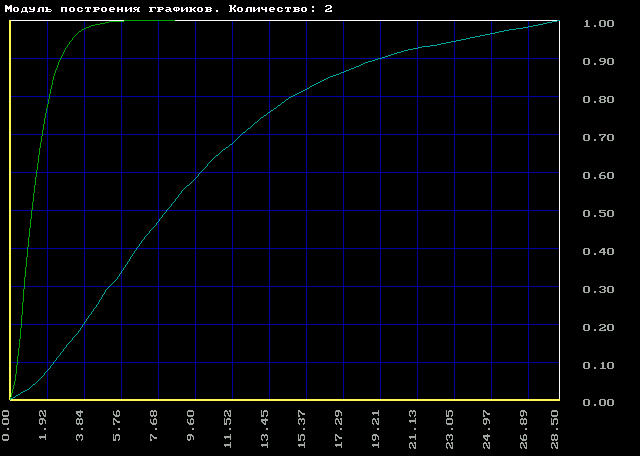
Для кривой разгона по заданию.
Устанавливаем конечное время 55с, шаг 0,5с.
Для кривой разгона по управлению.
При задании передаточной функции учитываем чистое запаздывание 0,08с.
Устанавливаем конечное время 39с, шаг изменения 0,5с.
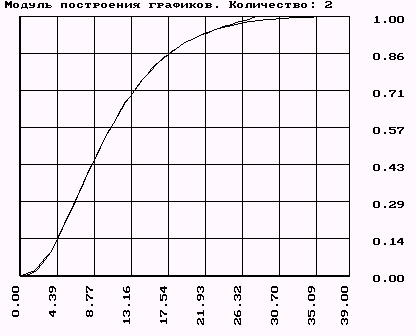
Получили, что кривые разгона практически одинаковы, следовательно аппроксимация методом Симою сделана верно.
Для объекта второго порядка по возмущению имеем погрешность метода около 25%, по заданию - около 15%, а для объекта третьего порядка с запаздыванием по управлению - около 5%.
Сравним экспериментальные и исходные передаточные функции:
объект исходная экспериментальная
передаточная передаточная
функция функция
второго порядка 1 1
по возмущению W(s)= -------------------- W(s)= -----------------------------
2 2
0.01s + 0.2s + 1 11.465s + 6.5614s +1

второго порядка 1 1
по заданию W(s)= ----------------------- W(s)= -----------------------------
2 2
0.4489s + 1.34s +1 24.2986s + 9.5539s +1
третьего порядка 1000 1
с запаздыванием W(s)= ------------------------------------- W(s)= -------------------------------------
по управлению 3 2 3 2
4.2188s + 168.75s + 2250s + 1 30.4228s + 38.116s + 10.7769s + 1
Полученные значению передаточных функций отличают на 1000 - 7500, что говорит о достаточно большой погрешности между фактическими и экспериментальными данными.
Для исходных передаточных функций с помощью программы ASR, пунктов аппроксимация (создать передаточную функцию и изменить время) получим координаты кривых разгона и сравним их с экспериментальной кривой:
1. по возмущению:
|
0,0000 |
0,0000 |
|
0,1000 |
0,2917 |
|
0,2000 |
0,6094 |
|
0,3000 |
0,8066 |
|
0,4000 |
0,9099 |
|
0,5000 |
0,9596 |
|
0,6000 |
0,9824 |
|
0,7000 |
0,9925 |
|
0,8000 |
0,9968 |
|
0,9000 |
0,9987 |
|
1,0000 |
0,9995 |
|
1,1000 |
0,9998 |
|
1,2000 |
0,9999 |
|
1,3000 |
1,0000 |
2. по заданию:
|
1 |
0,0000 |
0,0000 |
17 |
4,0000 |
0,9822 |
|
2 |
0,2500 |
0,0547 |
18 |
4,2500 |
0,9871 |
|
3 |
0,5000 |
0,1723 |
19 |
4,5000 |
0,9907 |
|
4 |
0,7500 |
0,3083 |
20 |
4,7500 |
0,9933 |
|
5 |
1,0000 |
0,4399 |
21 |
5,0000 |
0,9951 |
|
6 |
1,2500 |
0,5565 |
22 |
5,2500 |
0,9965 |
|
7 |
1,5000 |
0,6549 |
23 |
5,5000 |
0,9975 |
|
8 |
1,7500 |
0,7350 |
24 |
5,7500 |
0,9982 |
|
9 |
2,0000 |
0,7987 |
25 |
6,0000 |
0,9987 |
|
10 |
2,2500 |
0,8484 |
26 |
6,2500 |
0,9991 |
|
11 |
2,5000 |
0,8867 |
27 |
6,5000 |
0,9993 |
|
12 |
2,7500 |
0,9158 |
28 |
6,7500 |
0,9995 |
|
13 |
3,0000 |
0,9378 |
29 |
7,0000 |
0,9997 |
|
14 |
3,2500 |
0,9542 |
30 |
7,2500 |
0,9998 |
|
15 |
3,5000 |
0,9665 |
31 |
7,5000 |
0,9999 |
|
16 |
3,7500 |
0,9755 |
32 |
7,7500 |
1,0000 |
3. по управлению:
Сравнивая экспериментальные и фактические кривые разгона видим, что они отличаются очень сильно. Фактическая кривая разгона приходит к 1 на много быстрее, чем экспериментальная.
Расчет АФХ передаточных функций.
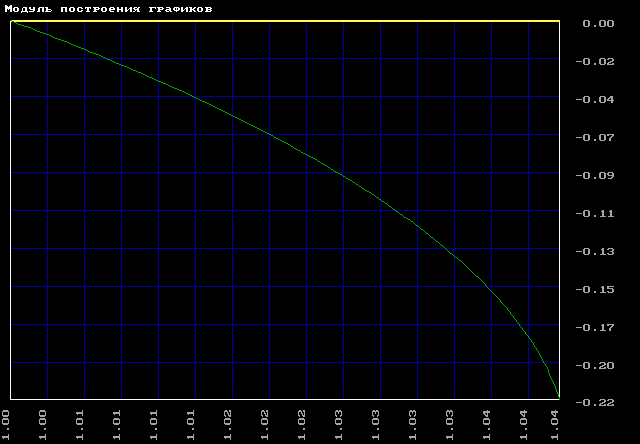
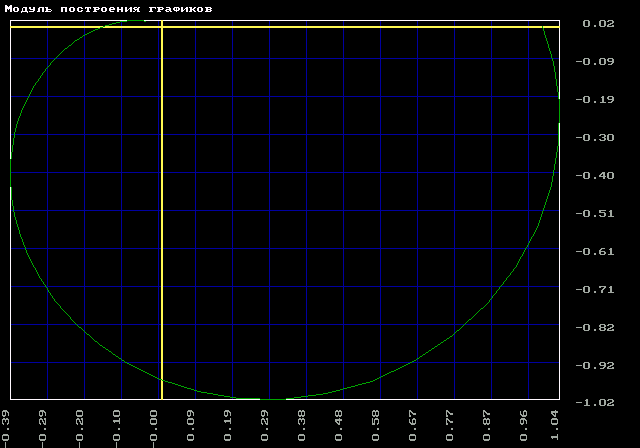
1. Объект второго порядка по возмущению:
а) экспериментальная:
|
1 |
1,0000 |
0,0000 |
34 |
-0,3751 |
-0,5372 |
68 |
-0,1944 |
-0,0241 |
|
2 |
1,0211 |
-0,0678 |
35 |
-0,3828 |
-0,5004 |
69 |
-0,1891 |
-0,0210 |
|
3 |
1,0360 |
-0,1397 |
36 |
-0,3877 |
-0,4653 |
70 |
-0,1839 |
-0,0182 |
|
4 |
1,0438 |
-0,2150 |
37 |
-0,3903 |
-0,4320 |
71 |
-0,1790 |
-0,0155 |
|
5 |
1,0440 |
-0,2927 |
38 |
-0,3909 |
-0,4006 |
72 |
-0,1741 |
-0,0131 |
|
6 |
1,0359 |
-0,3720 |
39 |
-0,3897 |
-0,3709 |
73 |
-0,1695 |
-0,0108 |
|
7 |
1,0191 |
-0,4516 |
40 |
-0,3871 |
-0,3431 |
74 |
-0,1650 |
-0,0087 |
|
8 |
0,9935 |
-0,5304 |
41 |
-0,3832 |
-0,3170 |
75 |
-0,1606 |
-0,0067 |
|
9 |
0,9591 |
-0,6072 |
42 |
-0,3783 |
-0,2927 |
76 |
-0,1564 |
-0,0049 |
|
10 |
0,9161 |
-0,6805 |
43 |
-0,3725 |
-0,2699 |
77 |
-0,1524 |
-0,0032 |
|
11 |
0,8649 |
-0,7492 |
44 |
-0,3661 |
-0,2488 |
78 |
-0,1484 |
-0,0017 |
|
12 |
0,8062 |
-0,8121 |
45 |
-0,3592 |
-0,2291 |
79 |
-0,1446 |
-0,0003 |
|
13 |
0,7408 |
-0,8681 |
46 |
-0,3518 |
-0,2108 |
80 |
-0,1410 |
0,0011 |
|
14 |
0,6700 |
-0,9163 |
47 |
-0,3442 |
-0,1939 |
81 |
-0,1374 |
0,0023 |
|
15 |
0,5948 |
-0,9560 |
48 |
-0,3363 |
-0,1781 |
82 |
-0,1340 |
0,0034 |
|
16 |
0,5166 |
-0,9868 |
49 |
-0,3283 |
-0,1636 |
83 |
-0,1306 |
0,0045 |
|
17 |
0,4367 |
-1,0085 |
50 |
-0,3202 |
-0,1501 |
84 |
-0,1274 |
0,0055 |
|
18 |
0,3565 |
-1,0211 |
51 |
-0,3121 |
-0,1376 |
85 |
-0,1243 |
0,0064 |
|
19 |
0,2774 |
-1,0249 |
52 |
-0,3040 |
-0,1260 |
86 |
-0,1213 |
0,0072 |
|
20 |
0,2003 |
-1,0203 |
53 |
-0,2960 |
-0,1153 |
87 |
-0,1184 |
0,0079 |
|
21 |
0,1265 |
-1,0081 |
54 |
-0,2880 |
-0,1054 |
88 |
-0,1156 |
0,0086 |
|
22 |
0,0567 |
-0,9890 |
55 |
-0,2802 |
-0,0962 |
89 |
-0,1128 |
0,0093 |
|
23 |
-0,0083 |
-0,9640 |
56 |
-0,2726 |
-0,0877 |
90 |
-0,1102 |
0,0099 |
|
24 |
-0,0680 |
-0,9339 |
57 |
-0,2651 |
-0,0799 |
91 |
-0,1076 |
0,0104 |
|
25 |
-0,1222 |
-0,8997 |
58 |
-0,2577 |
-0,0726 |
92 |
-0,1052 |
0,0109 |
|
26 |
-0,1708 |
-0,8924 |
59 |
-0,2505 |
-0,0659 |
93 |
-0,1028 |
0,0114 |
|
27 |
-0,2136 |
-0,8228 |
60 |
-0,2435 |
-0,0597 |
94 |
-0,1004 |
0,0118 |
|
28 |
-0,2509 |
-0,7817 |
61 |
-0,0237 |
-0,0540 |
95 |
-0,0982 |
0,0122 |
|
29 |
-0,2829 |
-0,7399 |
62 |
-0,2301 |
-0,0487 |
96 |
-0,0960 |
0,0126 |
|
30 |
-0,3098 |
-0,6978 |
63 |
-0,2237 |
-0,0437 |
97 |
-0,0939 |
0,0129 |
|
31 |
-0,3322 |
-0,6562 |
64 |
-0,2175 |
-0,0392 |
98 |
-0,0918 |
0,0132 |
|
32 |
-0,3502 |
-0,6153 |
65 |
-0,2114 |
-0,0350 |
99 |
-0,0898 |
0,0134 |
|
33 |
-0,3644 |
-0,5756 |
66 |
-0,2056 |
-0,0311 |
100 |
-0,0879 |
0,0134 |
|
67 |
-0,1999 |
-0,0275 |
б) фактическая
 2.
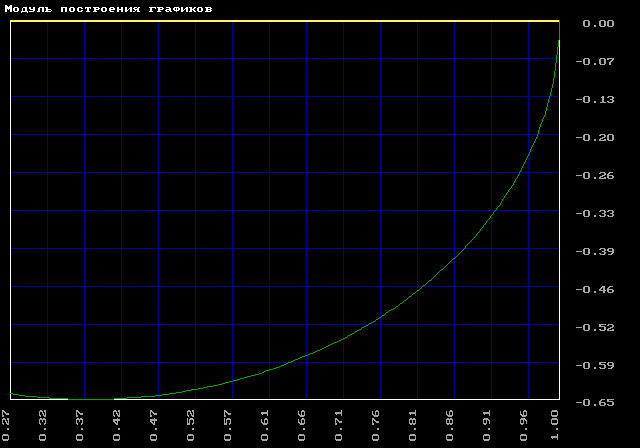
Объект второго порядка по заданию.
2.
Объект второго порядка по заданию.
а) экспериментальная
б) фактическая
3. Объект третьего порядка с запаздыванием по управлению
а) экспериментальная
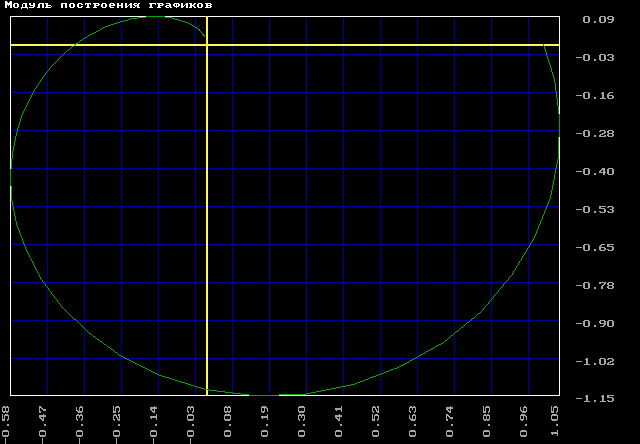
б) фактическая
Расчет одноконтурной АСР методом Роточа.
В программе Linreg задаем параметры объекта с учетом оператора Лапласса.