Система управления электроприводом БТУ 3601
Введение
Основная цель данного курсового проекта это разработка тиристорного электропривода на базе комплектного электропривода БТУ 3601, в процессе выполнения будет необходимо: рассчитать и выбрать элементы силовой части электропривода, построить статические характеристики разомкнутого электропривода, синтезировать и рассчитать параметры регуляторов и смоделировать переходных процессов скорости и тока электропривода с помощью программного пакета MATLAB 6.5. Это позволит приобрести навыки самостоятельного принятия инженерных решений на базе современной полупроводниковой техники при расчете и проектирование систем автоматического управления.
Система электропривода и его функциональная схема
По заданию на курсовой проект был выбрана система электропривода по схеме «тиристорный преобразователь – двигатель» которая, реализована комплектным тиристорным электроприводом БТУ-3601
Расчет и выбор элементов силовой части электропривода
Выбор силового трансформатора тиристорного преобразователя
Приведем сопротивление обмоток двигателя к нагретому состоянию учтя, что максимальная рабочая температура для изоляции класс B = 90 C:
Сопротивление обмотки возбуждения:

Сопротивление якорной цепи:
>Рассчитаем номинальную скорость двигателя:>

Трансформатор в управляемом вентильном электроприводе необходим для согласования напряжения сети с напряжением двигателя [1].
Фазное напряжение вторичной обмотки трансформатора определяется выражением:

где
 – коэффициент запаса по напряжению
сети,
– коэффициент запаса по напряжению
сети,
 – коэффициент запаса по напряжению,
учитывающий неполное открытие вентилей
при максимальном управляющем сигнале,
– коэффициент запаса по напряжению,
учитывающий неполное открытие вентилей
при максимальном управляющем сигнале,
 – коэффициент запаса по напряжению,
учитывающий падение напряжения в
вентиле, в обмотках трансформатора,
– коэффициент запаса по напряжению,
учитывающий падение напряжения в
вентиле, в обмотках трансформатора,
 – коэффициент пропорциональности между
средневыпрямленным напряжением и
действующим значением фазного напряжения
вторичной обмотки для трехфазной
мостовой схемы выпрямления,
– коэффициент пропорциональности между
средневыпрямленным напряжением и
действующим значением фазного напряжения
вторичной обмотки для трехфазной
мостовой схемы выпрямления,
 – номинальное напряжение двигателя
– номинальное напряжение двигателя
Коэффициент трансформации трансформатора:
Так,
как коэффициент трансформации равен
единице воспользуемся бестрансформаторным
варианте схемы, где силовые цепи
преобразователя тиристорного
электропривода подключаются к сети
через анодный реактор. Анодный реактор
выбирают по действующему значению
номинального тока фазы преобразователя
 ,
где коэффициент b
схемы выпрямления (b=0,817
для мостовой схемы), и номинальному
напряжению сети.
,
где коэффициент b
схемы выпрямления (b=0,817
для мостовой схемы), и номинальному
напряжению сети.
Номинальный ток двигателя равен:

электропривод силовой регулятор matlab
где
 – номинальная мощность двигателя,
– номинальная мощность двигателя,
 – номинальное напряжение обмотки
возбуждения,
– номинальное напряжение обмотки
возбуждения,
 – номинальный КПД двигателя,
– номинальный КПД двигателя,
 – сопротивление обмотки возбуждения
в нагретом состоянии.
– сопротивление обмотки возбуждения
в нагретом состоянии.
Ток фазы первичной обмотки трансформатора:

Ток фазы вторичной обмотки трансформатора:

Выбираем анодный реактор типа РС 40/1,4 [2]. Его параметры, взятые из справочных данных:
 >.>
>.>
Проверка и выбор тиристоров
Выбор и проверка тиристоров, принятых к установке в преобразователе, производятся, по трем параметрам: по среднему току, максимальному амплитудному значении напряжения на тиристоре и ударному току внутреннего короткого замыкания [2].
Среднее значение тока, протекающего через тиристор:
где:
 – допустимый
ток двигателя, для общепромышленной
серии машин –
=
– допустимый
ток двигателя, для общепромышленной
серии машин –
=
 ,
для серии двигателей 2ПФ;
,
для серии двигателей 2ПФ;
 – для трехфазной мостовой схемы.
– для трехфазной мостовой схемы.
Значение тока, приведенное к классификационным параметрам тиристоров:

где
 – коэффициент запаса по току,
– коэффициент запаса по току,
 – коэффициент, зависящий от схемы
выпрямления, угла проводимости и от
формы тока,
– коэффициент, зависящий от схемы
выпрямления, угла проводимости и от
формы тока,
 – коэффициент, учитывающий условия
охлаждения.
– коэффициент, учитывающий условия
охлаждения.
Найденный ток
 должен быть меньше действующего значения
прямого тока:
должен быть меньше действующего значения
прямого тока:
Максимальное амплитудное напряжение на тиристоре:

где
 – коэффициент запаса по напряжению,
учитывающий возможность перенапряжений
на тиристорах;
– коэффициент запаса по напряжению,
учитывающий возможность перенапряжений
на тиристорах;
 – линейное действующее значение
напряжения вторичной обмотки
трансформатора,
– линейное действующее значение
напряжения вторичной обмотки
трансформатора,
 .
должно быть меньше повторяющегося
напряжения тиристора.
.
должно быть меньше повторяющегося
напряжения тиристора.
Для нахождения ударного тока внутреннего короткого замыкания (КЗ на стороне постоянного тока, якорная цепь двигателя и реактора вне цепи) определяется амплитуда базового тока:

где
 -
амплитуда фазного напряжения вторичной
обмотки трансформатора.
-
амплитуда фазного напряжения вторичной
обмотки трансформатора.
Ударный ток внутреннего короткого замыкания находится по формуле:

где
 ,
определяется по кривым [3, рис. 1.128,
с. 106] в зависимости от в зависимости
от
,
определяется по кривым [3, рис. 1.128,
с. 106] в зависимости от в зависимости
от
 при
при
 .
.
Тиристор будет
удовлетворять требованиям, если ток
внутреннего короткого замыкания в
преобразователе будет меньше
 ударного тока тиристора, то есть:
ударного тока тиристора, то есть:
По выше найденным соотношениям выбираем тип тиристора [2], типа Т171–200 с техническими данными представленными в табл. 1.
Таблица 1
|
Тип |
U>пор>, В |
U>max>, В |
I>max>> >>cp>, A |
I>y>>д>, kA |
I2t>тир>, A2c |
(du/dt), мкс |
|
Т171–200 |
1,15 |
500…1200 |
200 |
5,2 |
135000 |
160 |
Выбор катодного дросселя
Так, как пульсации выпрямленного тока существенно ухудшают режим коммутации в двигателе и увеличивают его нагрев, для их сглаживания в схему добавляют катодный дроссель. Для этого необходимо найти амплитудные значения выпрямленного напряжения основной гармоники:


где
 –
средневыпрямленное напряжение при угле
регулирования, равном нулю; р = 6 – для
трехфазной мостовой; k
= 1 – кратность гармоники, т.е. отношение
порядкового номера гармоники к числу
пульсации. В симметричной мостовой и
нулевых схемах наибольшую амплитуду
имеет основная гармоника k
= 1. Гармоники более высокой кратности
имеют малую амплитуду, и действие
дросселя на них эффективнее, поэтому
расчет индуктивности дросселя ведется
только по первой гармонике.
–
средневыпрямленное напряжение при угле
регулирования, равном нулю; р = 6 – для
трехфазной мостовой; k
= 1 – кратность гармоники, т.е. отношение
порядкового номера гармоники к числу
пульсации. В симметричной мостовой и
нулевых схемах наибольшую амплитуду
имеет основная гармоника k
= 1. Гармоники более высокой кратности
имеют малую амплитуду, и действие
дросселя на них эффективнее, поэтому
расчет индуктивности дросселя ведется
только по первой гармонике.
По
известной амплитуде переменной
составляющей
 и допустимому действующему значению
основной гармоники тока н>1>
(1)% необходимая величина индуктивности
цепи выпрямленного тока рассчитывается
по формуле:
и допустимому действующему значению
основной гармоники тока н>1>
(1)% необходимая величина индуктивности
цепи выпрямленного тока рассчитывается
по формуле:

где
 – для машин без компенсационной обмотки;
– для машин без компенсационной обмотки;
 – номинальный
ток двигателя.
– номинальный
ток двигателя.
Индуктивность сглаживающего ректора:


где
 – индуктивность анодного реактора,
– индуктивность анодного реактора,
Так,
как по расчету получилась отрицательная
величина
 ,
то это свидетельствует о том, что при
принятом уровне пульсации тока катодный
дроссель не нужен. Тогда действительный
уровень пульсации тока первой гармоники
с учетом приведенной индуктивности
трансформатора или анодного реактора
можно определить по формуле:
,
то это свидетельствует о том, что при
принятом уровне пульсации тока катодный
дроссель не нужен. Тогда действительный
уровень пульсации тока первой гармоники
с учетом приведенной индуктивности
трансформатора или анодного реактора
можно определить по формуле:

Значение гранично-непрерывного тока якоря двигателя в этом случае можно найти, используя соотношение:
где
 – граничное значение коэффициента:
– граничное значение коэффициента:

Рассчитаем максимальный
угол регулирования
 :
:


где
 – конструктивная
постоянная на номинальный поток:
– конструктивная
постоянная на номинальный поток:

Рассчитаем скорость двигателя при максимальном угле управления:

При
угле регулирования
 значение гранично-непрерывного тока
значение гранично-непрерывного тока
 больше,
чем
больше,
чем
 ,
значит влиянием прерывистого режима
тока электроприводе нельзя пренебречь.
,
значит влиянием прерывистого режима
тока электроприводе нельзя пренебречь.
Расчет параметров силовой цепи электропривода
Эквивалентное сопротивление якорной цепи двигатель – преобразователь:

Эквивалентная индуктивность якорной цепи двигатель – преобразователь:

d – Коэффициент из табл. 1 [2].
Напряжение преобразователя при работе электропривода в номинальном режиме

Угол регулирования, соответствующий номинальному режиму работы:

Минимальный
угол регулирования должен превышать
 для
надежного включения вентиля, значит
запас напряжения доступный преобразователю
равен отношению:
для
надежного включения вентиля, значит
запас напряжения доступный преобразователю
равен отношению:

Электромагнитная постоянная времени якорной цепи двигатель – преобразователь:
Электромеханическая постоянная времени электропривода:

где: –приведенное
значение момента инерция привода;
–приведенное
значение момента инерция привода;
Построение статических характеристик разомкнутого электропривода
Естественные характеристики двигателя
Найдем номинальное значение момента двигателя:

Естественная механическая характеристика двигателя постоянного тока описывается выражением [3]:
Естественную характеристику построим по двум точкам:
1. Точка идеального
холостого хода
 при
при
 :
:

2. Точка работы при
номинальной частоте вращения
 .
.
Основные характеристики электропривода
Основная механическая характеристика электропривода описывается уравнением:
Основную характеристику построим по двум точкам:
1. Точка идеального
холостого хода
 при
:
при
:

2. Точка работы при
номинальной частоте вращения
.
Характеристики, обеспечивающие минимальную скорость работы электропривода
Минимальную скорость работы электропривода будет обеспечивать
напряжение преобразователя равное:

1. Точка идеального
холостого хода
при
:

2. Точка работы при
минимальной частоте вращения
 .
.
Характеристики аварийного динамического торможения
Механическая характеристика динамического торможения описывается выражением:
где
 – добавочное сопротивление якоря
двигателя при динамическом торможении.
– добавочное сопротивление якоря
двигателя при динамическом торможении.

Все полученные характеристики построены на рис. 2 и рис. 3.
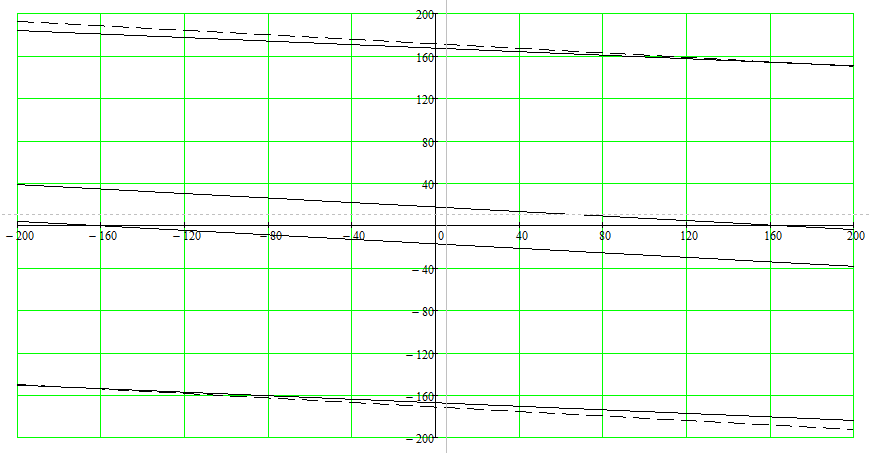
Рис. 2
Рис. 3
Синтез и расчет параметров регуляторов в линеализованных системах управления частотой вращения электропривода
Структурная схема автоматизированного электропривода
При проектировании электропривода двухконтурной схемой с контурами регулирования скорости и тока, линеаризованная структурная схема двухконтурного автоматизированного электропривода регулирования частоты вращения представлена на рис. 4.

Рис. 4
Где передаточные функции звеньев двигателя: W>1>(р), W>2>(р), W>3>(р); преобразователя W>П>(p) и передаточные функции фильтров W>ОС>(p), W>ОТ>(p), положительная обратная связь с передаточной функцией W>4>(р) служит для компенсация внутренней обратной связи по ЭДС двигателя, передаточные функции регуляторов W>РС>(p), W>РТ>(p) и их параметры будут определен в процессе синтеза методом подчиненного регулирования.
Тиристорный преобразователь является звеном, передаточная функция которого:
где –
 коэффициент усиления управляемого
вентильного преобразователя, который
определяется выбранной точкой
линеаризации; Т>n>
= 0,009 с – постоянная времени системы
управления преобразователем.
коэффициент усиления управляемого
вентильного преобразователя, который
определяется выбранной точкой
линеаризации; Т>n>
= 0,009 с – постоянная времени системы
управления преобразователем.
Коэффициент обратной связи по току:

где
 – напряжение
насыщения выхода регулятора скорости.
– напряжение
насыщения выхода регулятора скорости.
Расчетное значение коэффициента обратной связи по скорости определяется выражением:

где
– максимальное значение напряжения
задания.
Синтез начинаем с внутреннего контура – контура тока.
Синтез контура регулирования тока (КРТ) якоря двигателя
Структурная схема контура тока представлена на рис. 5, на которой: k>Т> – коэффициент обратной связи по току; W>РТ>(р) – передаточная функция регулятора тока, которая подлежит определению.
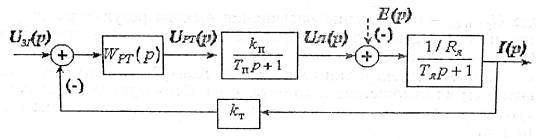
Рис. 5
При синтезе прими следующие допущения:
Пренебрежем влиянием ЭДС вращения в контуре тока якоря.
Не учитывается влияние внутренней обратной связи по ЭДС двигателя
Настройку регулятора тока будем осуществлять на технический оптимум, следовательно, разомкнутый контур тока должен имеет передаточную функцию:
Следовательно, передаточная функция регулятора тока по схеме рис 4 определится из условия:

и при
 получим передаточную функцию регулятора
тока:
получим передаточную функцию регулятора
тока:

где
 -
коэффициент передачи пропорциональной
части регулятора тока,
-
коэффициент передачи пропорциональной
части регулятора тока,
 – постоянная времени интегральной
части регулятора тока.
– постоянная времени интегральной
части регулятора тока.
Синтез контура регулирования скорости (КРС) электропривода
Контур скорости будем настраивать на симметричный оптимум для обеспечения астатизма САУ.
Контур скорости является внешним по отношению к контуру тока. Структурная схема контура скорости электропривода при тех же допущениях показана на риc. 6.
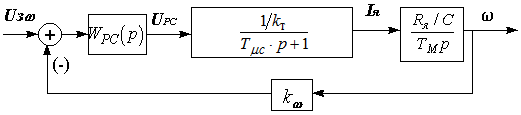
Рис. 6
Примем некомпенсируемую постоянную времени в контуре скорости:
При настройке на симметричный оптимум, разомкнутый контур скорости должен имеет передаточную функцию:

Следовательно, передаточная функция регулятора скорости определится из условия:

Следовательно, передаточная функция регулятора скорости при настройке контура скорости на симметричный оптимум:

где
 – коэффициент передачи пропорциональной
части регулятора скорости при настройке
контура скорости на симметричный
оптимум,
– коэффициент передачи пропорциональной
части регулятора скорости при настройке
контура скорости на симметричный
оптимум,
 – постоянная времени интегральной
части регулятора скорости при настройке
контура скорости на симметричный оптимум
– постоянная времени интегральной
части регулятора скорости при настройке
контура скорости на симметричный оптимум


При настройке на симметричный оптимум для уменьшения перерегулирования на вход системы необходимо установить фильтр с передаточной функцией:

Частота пропускания
системы подчиненного регулирования
скорости электропривода при настройке
его на симметричный оптимум и наличии
фильтра на входе равна

Моделирование переходных процессов скорости и тока электропривода на ЭВМ с помощью пакета MATLAB
Для проверки расчетов регуляторов делаем моделирование системы электропривода в прикладном пакете программ MATLAB6.5.
Структурная схема электропривода представлена на рис. 7.
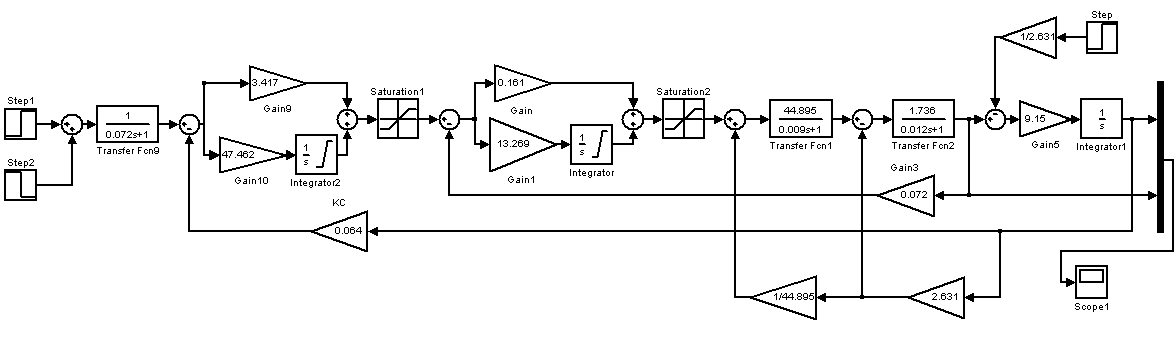
Рис. 7
Переходные процессы по скорости и току при пуске вхолостую, разгоне до минимальной скорости, с последующим разгоном до номинальной скорости, далее торможением до минимальной скорости и остановкой на рис. 8.
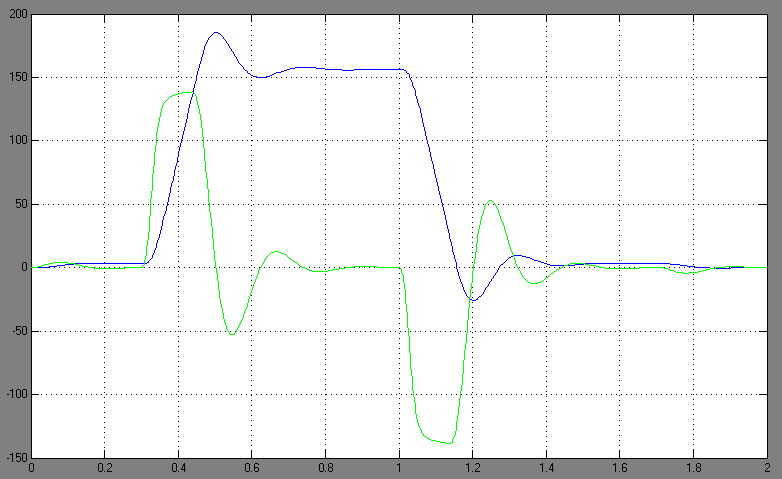
Рис. 8
Переходные процессы по скорости и току при пуске вхолостую с последующим реверсом и остановкой на рис. 9.

Рис. 9
Переходные процессы по скорости и току при разгоне до номинальной скорости с последующими набросом и сбросом нагрузки на рис. 10.
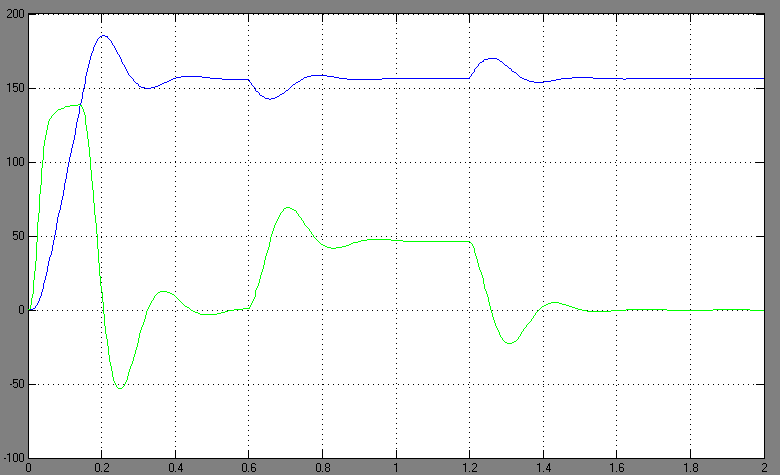
Рис. 10
Расчет параметров регуляторов тока, скорости, и выбор их элементов
Расчёт параметров регуляторов тока, скорости в системе подчиненного регулирования выполняется по расчетной схеме рис. 11 и передаточным функциям регуляторов. В расчётной схеме рис. 6.1 приняты следующие обозначения: ВА – датчик тока, (U>ВА>=k>ВА>I); BR – датчик скорости вращения (U>BR>=k>BR>щ); УП – управляемый преобразователь совместно с системой управления им; k>ВА>, k>BR> – коэффициенты передачи датчиков тока и скорости; R’>зс> – сопротивление в обратной связи усилителя при реализации на нем П-регулятора скорости.
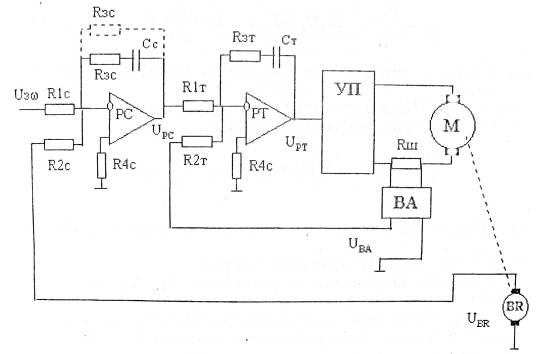
Рис. 11
Принимая величину
сопротивления
 ,
и k>ba>
=1 [2], находим остальные величины:
,
и k>ba>
=1 [2], находим остальные величины:


Сопротивление
 по не инвертирующему входу усилителя
выбирается из условия равенства нулю
напряжения смещения на выходе от входных
токов усилителя [2]:
по не инвертирующему входу усилителя
выбирается из условия равенства нулю
напряжения смещения на выходе от входных
токов усилителя [2]:


По расчетным значениям выбираем типовые резисторы и конденсаторы [4]. Выбираем резистор С5–42В соответственно ряду Е96 на 4.99 кОм, 787 Ом, 69,8 кОм и 681 Ом. Выбираем конденсатор типа К73–1б емкостью 0.15 мкФ [5].
Полностью аналогично для регулятора скорости:
Принимая величину
сопротивления
 ,
и k>br>
=1 [2], находим остальные величины:
,
и k>br>
=1 [2], находим остальные величины:


Сопротивление
 по неинвертирующему входу усилителя
выбирается из условия равенства нулю
напряжения смещения на выходе от входных
токов усилителя [2]:
по неинвертирующему входу усилителя
выбирается из условия равенства нулю
напряжения смещения на выходе от входных
токов усилителя [2]:


По расчетным значениям выбираем типовые резисторы и конденсаторы [4]. Выбираем резистор С5–42В соответственно ряду Е96 на 4.99 кОм, 16,9 кОм, 78,7 кОм и 370 Ом. Выбираем конденсатор типа К73–1б емкостью 3,9 мкФ [5].
Описание датчика проводимости вентилей БТУ-3601
Поскольку в мостовой схеме выпрямления для протекания тока в проводящем состоянии должны находиться минимум два тиристора из разных групп (один из анодный и другой из катодный), достаточно контролировать проводящее состояние тиристоров какой либо группы. В преобразователе осуществляется контроль состояния тиристоров катодной группы комплекта «Н» (соответственно – анодной группы комплекта «В»). Принципиальная схема ДПВ приведена на рис. 12.
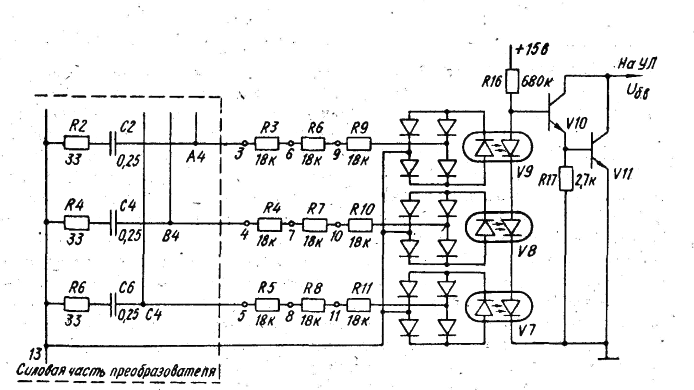
Рис. 12
В непроводящем состоянии на переходах анод – катод тиристоров существует переменное напряжение, равное фазному напряжению вторичной обмотки силового трансформатора. Параллельно тиристорам подключены RC-цепочки, выполняющие функцию защиты тиристоров от перенапряжений. Величина сопротивления RC-цепочки при указанных на схеме номиналах R и С составляет около 13 кОм на частоте сети, т.е. оказывается вполне достаточной, чтобы обеспечить входной ток оптрону. Напряжение каждой RC-цепочки через согласующие резисторы подается на диодные мосты V4, V5, V6, нагруженные на светодиоды оптронов V7, V8, V9. непроводящее состояние тиристоров соответствует засвеченному состоянию фотодиодов в оптронах, имеющих в этом случае малую величину сопротивления, достаточную для того, чтобы транзисторы V10, V11 находились в закрытом состоянии, т.е. ДПВ вырабатывает логический сигнал единичного уровня U>б.а.>=1.
Если какой-либо из тиристоров находится в проводящем состоянии, падение напряжения на соответствующей RC-цепочке равно нулю, поэтому через светодиод одного из оптронов не будет проходить ток. Фотодиод этого оптрона будет иметь большую величину сопротивления, приводящую к открытию транзисторов V10 и V11. Таким образом, во время проводящего состояния какого-либо из тиристоров ДПВ формирует логический сигнал нулевого уровня U>б.в.>=0.
В зависимости от номинального выпрямленного напряжения преобразователя (напряжения вторичной обмотки силового трансформатора) на сопротивлениях, согласующих силовое напряжение на тиристорах с входным токов оптронов, устанавливаются следующие перемычки: для номинального выпрямленного напряжения 115 В 3–9, 4–10, 5–11; для номинального выпрямленного напряжения 230 В 3–6, 4–7, 5–8.
Практически ДПВ имеет зону нечувствительности, проявляющуюся в виде провалов в сигнале U>б.в.> в моменты перехода через нуль напряжений на RC-цепочках. Поэтому в случае, если ни один тиристор моста не проводит, в сигнале U>б.в> все равно имеются короткие импульсы нулевого уровня [1].
Заключение
В процесс выполнения курсового проекта был разработан тиристорный электропривод на базе комплектного электропривода подачи БТУ-3601. Были рассчитаны и выбраны по справочной литературе силовые элементы привода. Осуществлен синтез регуляторов на основе метода подчиненного регулирования и выполнено проверочное моделирование. Проверка показала, что система отвечает заданным требованиям по диапазону регулирования и относительной погрешности регулирования на малой скорости. В заключении был описан процесс работы датчика проводимости вентилей.
Литература
1) Чернов Е.А., Кузьмин В, П., Синичкин С Г. Электроприводы подач станков с ЧПУ: Справочное пособие. – Горький: Волго-Вятское книжн. изд-во, 1986. – 234 с.
2) Симаков Г.М., Гринкевич Д.Я. Системы управления электроприводами: метод пособие. – Новосибирск: Изд-во НГТУ, 2001. – 78 с
3) Справочник по проектированию автоматизированного электропривода и систем управления технологическими процессами / Под ред. В.И. Круповича, Ю.Г. Барыбина, М.Л. Самовера. – 3-е изд., перераб. и доп. – М.: Энергоиздат, 1982 – 416 с.
4) Резисторы: Справочник / Ю.Н. Андреев. А.И, Антонян, Д.М. Иванов и др.; Под ред. И.И. Четверткова. – М.: Энергоиздат, 1981. –352 с.
5) Справочник по электрическим конденсаторам / М.Н. Дьяков, В.И. Каратанов, В.И. Присняков и др.; Под ред. И.И. Четверткова и В.Ф, Смирнова. – М.: Радио и связь, 1983. – 576 с.