Синтез системы автоматического управления процессом электрической очистки газа
Министерство образования и науки российской федерации
Федеральное агентство по образованию
ФГОУ СПО Каменский химико-механический техникум
Курсовой проект
Тема: Синтез системы автоматического управления процессом электрической очистки газа
г. Каменск-Шахтинский 2010 г.
Содержание
Введение
1.Специальная часть
1.1 Расчёт передаточной функции объекта управления
1.2 Выбор регулятора и расчет его настроек
1.3 Выбор типового переходного процесса
1.4 Построение временной характеристики САУ по управляющему воздействию с помощью программы SamSim
1.5 Построение АФХ разомкнутой САУ Advanced Grapher v1.61
2. Техническая часть
2.1 Посторенние структурной схемы САУ
2.2 Описание приборов
2.3 Работа САУ
Заключение
Список используемой литературы
Введение
В химической промышленности автоматизации и механизации уделяется большое внимание. Это объясняется сложностью и высокой скорость. Протекания технологических процессов, а так же чувствительностью их к нарушению режима, вредностью условий работы, взрыво- и пожароопасность перерабатываемых веществ.
Автоматизация позволяет улучшить основные показатели эффективности производства: увеличение количества, улучшение качества и снижение себестоимости выпускаемой продукции, повышение производительности труда.
В автоматизированном производстве человек переключается на творческую работу – анализ результатов управления, составление заданий и программ для автоматических приборов, наладку сложных автоматических устройств и т.д. При этом от специалистов требуются знания не только устройства различных приборов, но и общих принципов составления системы автоуправления.
Комплексная автоматизация процессов химической технологии предполагает не только автоматическое обеспечение нормального хода этих процессов с использованием различных автоматических устройств, но и автоматическое управление пуском и остановкой аппаратов для ремонтных работ и в критических ситуациях.
Процесс кристаллизации относится к непрерывным технологическим процессам, при этом необходимо поддерживать постоянными режимные параметры.
Показателем эффективности данного процесса является степень очистки газа.
Для решения задачи построена одноконтурная система управления процессом электрической очистки газа. Выбран регулятор и построена математическая модель системы управления. На модели определены оптимальные параметры регулятора.
Выбраны приборы для основного контура регулирования.
1. Специальная часть
1.1 Расчёт передаточной функции объекта управления
Исходные данные: кривая разгона,
величина входного воздействия в
безразмерной форме (
 =1800мм/ч).
=1800мм/ч).
В данном случае, кривая разгона объекта с самовыравниванием. Это объект с самовыравниванием , с динамическими свойствами сложного звена, являющегося сочетанием звена запаздывания и апериодического звена первого порядка.
Далее производим определение
коэффициентов
 и
и
 производится в следующей последовательности:
производится в следующей последовательности:
Определим по графику значение y1 ,y0



где y1-значение
регулируемой величины, соответствующее
новому состоянию равновесия. где
 -
значение регулируемой величины,
соответствующее начальному состоянию
равновесия.
-
значение регулируемой величины,
соответствующее начальному состоянию
равновесия.
Для определения
рассчитаем y2
,y3;
t1,t2
по формулам:


Для определения t1,t2 по значениям y2 ,y3 спроецируем на осьT.
T1=27мм T2=38мм
В соответствии с полученными значениями рассчитаем t1,t2 по формулам:
 ;
;

Подставим рассчитанные значения:
T0=1.25(t2-t1)=1.25(76-54)=27.5 (с)
Рассчитаем время запаздывания
:
=0,5(3t1-t2)=0.5(3*54-76)=43
(с)
Для определения коэффициента К0, рассчитаем
∆φ
В соответствии с полученными
значениями рассчитаем К0:
Проверяем достоверность найденных коэффициентов на графике опытной кривой, строим расчетную кривую, вычисляя ее точки по уравнению:
где t- текущее время.
Рассчитаем значение y:

=
Остальные расчёты точек по оси y выполняются аналогично и заносятся в таблицу
Таблица 1
|
t |
0 |
37 |
45 |
54 |
63 |
72 |
81 |
|
y |
25.5 |
37.3 |
46.2 |
53 |
59.36 |
61.15 |
62.8 |
Построим расчётную кривую разгона по результатам расчёта представленных в таблице 1.
Вывод: По результатам построения видно, что расчётная кривая совпадает с опытной, поэтому считаем, что коэффициенты передаточной функции объекта определены верно.
6. Напишем дифференциальное уравнение:




1.2 Выбор регулятора и расчет его настроек
При выборе регулятора в первую очередь выбирается:
Тип переходного процесса;
Закон регулирования;
Производится расчет настроек регулятора.
И на основании выше изложенного выбирается сам регулятор.
1.3 Выбор типового переходного процесса
Он выбирается в соответствии с требованиями технологического регламента к качеству процесса регулирования. В данном курсовом проекте условием к качеству процесса регулирования является регулирование без статической погрешности и с временем переходного процесса от 4 Тзап до 6 Т зап.
В связи с этим условием наиболее
подходящим переходным процессом является
переходной процесс с 20-% - ным
перерегулированием. Он характеризуется
более длительным регулирующим
воздействием, чем при апериодическом
переходном процессе и меньшей динамической
погрешностью. Время регулирования
увеличивается. В целом этот переходной
процесс по своим показаниям занимает
среднее положение между первым и третьим
переходными процессами и допускается
в качестве оптимального когда допустимо
минимальное время первого полупериода
колебаний степень затухания .
.
Выбор закона регулирования
зависит от качества работы САУ. Если
есть ограничение по времени регулирования
от 4 <tp<6,-
то ПИД- регулятор.
<tp<6,-
то ПИД- регулятор.
Выбор производится в соответствие к качеству регулирования к достоинствам и недостаткам законов регулирования
 - регулятор импульсного действия.
- регулятор импульсного действия.
После выбора переходного процесса и закона регулирования рассчитываются настройки регулятора, используя формулы, подходящие под данный переходной процесс и закон регулирования.
ПИ-регулятор:


ПИД- регулятор:



1.4 Построение временной характеристики САУ по управляющему воздействию
Модулирование происходит в программе SamSim.
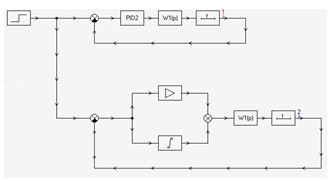
Рис. 1 структурные схемы переходных процессов с ПИ и ПИД регуляторами.
1
2
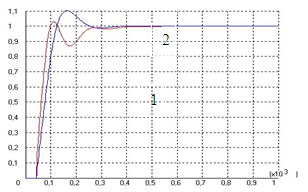
Рис.2 графики переходных процессов
1- Переходной процесс в системе с ПИ регулятором
Переходной процесс в системе с ПИД регулятором
По полученным результатам строим таблицу для выбора наиболее
подходящего регулятора:
Таблица 2
|
Параметры САУ |
Настройки регулятора |
Тип переходного процесса |
Параметры процесса |
|||||
|
Коэффициент усиления |
Время интегрирования |
Время деферинциро вания |
Время регули-ровани |
Динами ческая погреш ность |
Статическая погреш ность |
Затуха ние |
||
|
САУ с ПИ регулятором |
0,015 |
2010 |
Апериодический переходной процесс |
256 |
0,13 |
0 |
100 |
|
|
САУ с ПИД регулятором |
0,0278 |
59 |
4 |
256 |
0,11 |
0 |
100 |
Вывод: По результатам сравнения выбран переходной процесс САУ с ПИД- регулятором т.к. у Пи и ПИД- регуляторов время регулирования одинаковое Тр=256(с), выбираем закон регулирование по динамической погрешности. Т.к у ПИД- регулятора меньшая динамическая погрешность чем у ПИ- регулятора- выбираем ПИД закон регулирования.
Произведем моделирование разомкнутой САУ в программе SamSim:

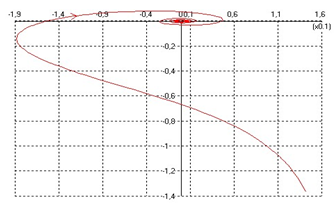
Рис. 3 АФХ разомкнутой САУ с ПИД регулятором в программе Samsim.
1.5 Построение АФХ разомкнутой САУ в Advanced Grapher v1.61
Построение АФХ разомкнутой САУ выполняем после предварительного аналитического расчета выберем координаты точек графика из программы SamSim (рис.3) и записи их в таблицу 2.
Таблица 3.
-
w
Re(w)
Im(w)
0,009
0,14
-1,36
0,01
0,13
-1,25
0,0149
0,098
-1,009
0,017
0,063
-0,89
0,0189
0,038
-0,77
0,026
-0,053
-0,57
0,034
-0,116
-0,41
0,037
-0,137
-0,36
0,043
0,171
-0,266
0,046
-0,179
-0,22
0,05
-0,185
-0,191
0,052
-0,18
-0,158
0,057
-0,187
-0,118
0,071
-0,158
-0,009
0,075
-0,14
0,017
0,097
0,05
0,078
0,15
0,047
0,0065
После выбора точек строим график с табличными значениями Х(Re(w)) и Y(Im(w)) с помощью программы Advanced Grapher v1.61
Затем строим прямую по таблице 3.
Таблица 4.
-
Re(w)
0
0,095
Im(w)
0
-0,993
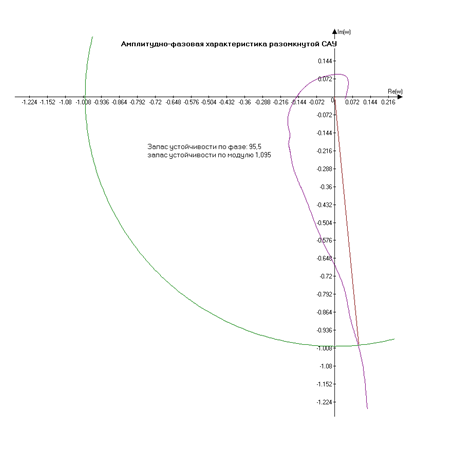
Рис.1
После построения графиков в Advanced Grapher v1.61 определяем запас по модулю и по фазе.
Запас по фазе определяется через arctg угла α:
α
2. Техническая часть
2.1 Посторенние структурной схемы САУ
Целью управления технологическим процессом является поддержание определенной концентрации очищенного газа путем электрической очисткой.
Параметрами, от которого зависит концентрация пыли на выходе из электрофильтра являются: напряжение питания U; нагрузка G; температура газа t; давление газа Р; влажность m.
Для сухих электрофильтров получено уравнение, дающие представление о зависимости конечной концентрации Ск от указанных параметров:
 ,
где Сн – начальная концентрация.
,
где Сн – начальная концентрация.
Из уравнения следует, что наиболее сильно на концентрацию Ск влияет начальная концентрация Сн, напряжение и расход; параметры P,t,r влияют меньше, они определяются ходом предыдущего технологического процесса, и с их изменением в объект будут поступать возмущающие воздействия.
Типовое регулирование электрофильтра по напряжению имеет существенный недостаток- среднее значение рабочего напряжения оказывается ниже оптимального вследствие его периодического снижения. Более перспективным является регулирование подачи неочищенного газа в электрофильтр.
В результате структурная схема по управлению регулирования расхода на электрофильтр для получения определенной концентрации очищенного газа.
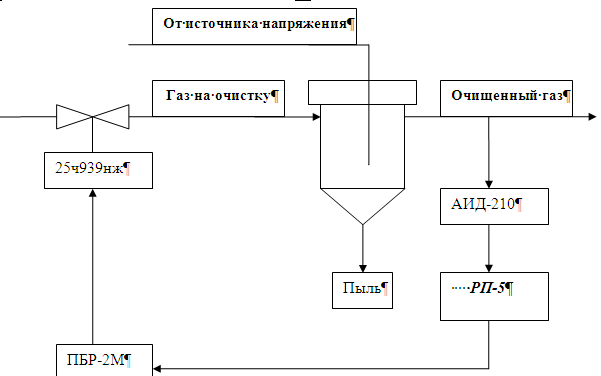
Рис.2
2.2 Описание приборов
Программируемый регулятор РП-5М1:
Назначение: Предназначен для управления технологическими процессами в различных отраслях промышленности. Является одноконтурным программируемым изделием ГСП. Кол-во входов аналоговых-4,
Функциональные возможности: формирование совместно с электрическим исполнительным механизмом постоянной скорости; регулирует по П- ПИ- ПИД- законам регулирования; формирования сигнала задания и его ручная установка, программный выбор вида входного сигнала для каждого вида его масштабирование; автоматический и ручной режимы управления; цифровая индикация сигнала контролируемого параметра.
Входной сигнал: Аналоговый, унифицированный- 0…0,5мА, 0…20мА, 4…20мА, напряжение 0…50мВ.
Выходной сигнал: импульсный, состояние ключей больше- меньше с нагрузочной способностью 24В, ток до 0,2А.
Предел регулирование по заказу.
Основная погрешность 0,5%
Зона возврата 0,2-2%
Постоянная времени 5…500с , дифференцирования 0…100
Питание 220В, 50гЦ, 10ВА.
Измеритель дыма типа АИД-210 «Энергия»:
Назначение: предназначен для непрерывного измерения дымности. Может применяться для определения эффективности пылеулавливающих установок. Прибор является одноканальным фотометром; действие его основано на измерении ослабления светового потока, прошедшего через контролируемую среду.
Пределы измерения 0—50 % дымности.
Основная относительная погрешность ±5 % от диапазона измерения.
Выходной сигнал 0—5 мА.
Время прогрева прибора 60 мин.
Температура контролируемой среды 70—250 °С,
содержание влаги 20 %,
разрежение в точке контроля 4 кПа.
Расход 25 м3/с. Для работы измерителя необходим воздух давлением 0,6 МПа.
Блоки питания БПЭ являются аналогами блоков 4БП36, БПС 90П и другое.
Одноканальные, двухканальные и четырёх канальные блоки питания моделей ПБЭ (далее – прибор или приборы) предназначены для питания стабилизированным напряжением постоянного тока 24 В или 36 В
измерительных преобразователей с унифицированным токовым выходом (термопреобразователи температуры, давления ми других физически величин) в промышленных установках. Приборы выпускаются в щитовом и настенном исполнении.
Технические характеристики:
Количество каналов 1,2 или 4
Выходное напряжение канала 24±0,48 или 36±0,72
Ток нагрузки , мА (по одному каналу) 0 – 50
Диапазон рабочих температур,0С от 5 до35
Ток срабатывания защиты, не более, мА 100
Ток короткого замыкания, не более, мА 20
Напряжение питания блока 220В, 50Гц
Потребляемая мощность, не более, ВА 3 – для одноканального БП;
8 – для двухканального БП;
15 – для четырёхканального БП.
Пыле- влагозащищённость Щитовое исполнение IP 20 ГОСТ 14254-96
Настенное исполнение IP 54 ГОСТ 14254-96
Климатическое исполнение УХЛ**3.1
Устойчивость к мех. Воздействиям N 2 ГОСТ 12997-84
Пускатель бесконтактный реверсивный ПБР-2М
Пускатель бесконтактный реверсивный ПБР-2М предназначен для бесконтактного управления электрическими исполнительными механизмами, в приводе которых используются однофазные конденсаторные электродвигатели. Область применения: системы автоматического регулирования технологическими процессами в энергетической и других отраслях промышленности.
Технические характеристики.
Входной сигнал: 24В постоянного пульсирующего тока или замыкание ключей
Входное сопротивление пускателя: 750 Ом
Максимальный коммутируемый ток: 4А
Построение АФХ разомкнутой САУ выполняем после выбора координат точек графика из программы SamSim и записи их в таблицу 2.
Быстродействие: 25 мс
Разница между длительностями входного и выходного сигналов не более: 20 мс
Напряжение источника питания цепей управления: 22-26В (среднее значение двухполупериодного выпрямленного тока)
Электрическое питание: 220В, 50 Гц
Потребляемая мощность: 7 Вт.
Состав и устройство
Пускатель ПБР-2М состоит из платы, кожуха и передней панели. На передней панели расположены две клеммные колодки для подключения пускателя к внешним цепям, а также винт заземления. Клеммные колодки закрываются крышками. На плате устанавливаются элементы схемы пускателя. Плата вставляется в кожух и закрепляется двумя винтами. Пускатель ПБР-2М рассчитан на установку на вертикальной или горизонтальной плоскости. Положение в пространстве - любое. Крепление пускателя осуществляется двумя болтами М6, которые установлены на задней стенке кожуха.
Регулирующий клапан 25ч939нж
25ч939нж применяют на трубопроводах для жидких и газообразных неагрессивных сред. Внутренняя расходная характеристика линейная. Управление от электрического исполнительного механизма типо МЭО предназначен для установки на трубопроводах c диаметром Ду-25, 40, 50, 65 мм., температура окружающей среды от -15 до 50 0С.
2.3 Работа САУ
Работа системы определяется cстепенью очистки газа. При её отклонении от задания датчик АИД-210 преобразует информацию концентрации в сигнал постоянного тока 0-5мА и передаёт на регулятор РП-5М1 . Он вычисляет рассогласование между заданным и текущим значениями концентрации и формирует управляющий сигнал по ПИД закону регулирования в виде
ШИМ- сигнала который подаётся через пускатель ПБР-2М на исполнительное
устройство типа 25ч939нж, которое изменяет расход неочищенного газа. В процессе изменения расхода загрязненного газа меняется концентрация газа к заданному значению. Изменение расхода прекратится при наступлении равенства текущего значения концентрации газа к заданному.
Заключение
При расчете данного курсового проекта мы получили следующие итоги:
1. Передаточная функция объекта с самовыравниванием имеет вид:
2. Тип регулятора и его настройки:
ПИД – регулятор, Кр=0,0278; Ти=52(с).

3. Запас устойчивости (рассчитываем по графику разомкнутой САУ)
 – устойчивость САУ по фазе.
– устойчивость САУ по фазе.
СЕ=1,095 – запас устойчивости по модулю.
4. Построена временная характеристика h(t) и определены её показатели качества
- время регулирования tp = 256с;
- динамическая погрешность 0,11;
- статическая погрешность 0;
5. В результате полученных настроек и закона регулятора, из комплекса приборов ЗЭИМ г. Чебоксары был выбран регулятор РП-5М1
автоматизация химический технология
Список используемой литературы
1.В.В. Черенков Справочник « Промышленные приборы и средства автоматизации»
2.Голубятников. Шувалов «Автоматизация производственных процессов»
3.Никишин Ю.В. Методические указания «Автоматическое управление»