Расчет ленточного ковшового элеватора
Министерство образования и науки Украины
Одесский национальный морской университет
Кафедра «ПТМ и МПР»
КУРСОВОЙ ПРОЕКТ
Расчет ленточного ковшового элеватора
по дисциплине
«Транспортирующие машины»
Принял:
Яременко В.А.
Выполнил
студент ФМП 4к.1гр.
Косевич А.Б.
Одесса – 2008г.
Введение
Элеватор – представляет собой вертикальный ленточный (или цепной) конвейер с ковшами, за счёт непрерывного перемещения которых осуществляется подъём материала. Как правило, конвейер помещают в прямоугольной трубе.
Материал в нижней части элеватора подхватывается ковшами, перемещается вертикально и выгружается через патрубок в горизонтальном направлении в верхней части нории. Ковши идут вниз опрокинутыми.
Основные параметры. Основными параметрами элеваторов являются производительность Q для насыпных грузов или L - для штучных; высота элеватора Н, измеряемая между центрами верхней и нижней звездочек (барабанов, бдоков); скорость и гибкого тягового элемента; мощность Р (кВт) приводного двигателя.
Преимущества и недостатки. Преимуществами элеваторов являются сохранность транспортируемого груза, простота конструкции, надежность при эксплуатации, возможность создания герметичного и звукоизолирующего кожуха, обеспечивающего защиту окружающей среды от пыли и шума, малые габаритные размеры в поперечном направлении, возможность подачи груза на значительную высоту (60 ... 90 м и более до 200 м), большой диапазон производительности (5 '" 500 м3/ч и до 1000 т/ч). К недостаткам относятся имеющие место отрывы ковшей при перегрузках и необходимость равномерной подачи груза.
Области применения. Элеваторы применяют во многих отрасслях промышленности. На предприятиях пищевой промышленности их используют для транспортирования зерна, муки и других продуктов помола, химической промышленности и промышленности строительных материалов - для перемещения пылевидных, зернистых и кусковых грузов. Элеваторы транспортируют ящики, бочки, барабаны, мешки, детали машин. В крупных библиотеках их используют для подачи книг из книгохранилищ в читальные залы.
Исходные данные для расчета ковшового элеватора
Род груза – известняк мелкокусковый;
Производительность – Q = 500 т/ч;
Высота подъема груза – H = 30м;
Плече захватной части элеватора – L = 5м.
1. Выбор конструкции ковша и тягового элемента
Необходимая погонная вместимость ковшей:

В данной формуле:
Q – расчетная производительность элеватора, Q=500т/ч
v – скорость движения ковшей, исходя из характеристики перегружаемого материала и рекомендуемого типа элеватора. Исходя из высокой производительности конвейера, принимаем максимально допустимую скорость для данного типа груза v = 0,63м/с ([1], табл. 12.5, стр.212);
ψ – коэффициент заполнения ковшей, ψ=0,8 ([1], табл. 12.5, стр.212);
ρ – насыпная плотность груза, ρ≈1,5 т/м3 ([3], табл. 1.7, стр.31);


Принимаем ковш типа С, емкостью 118л. Ширина ковша В>к>=800 мм., вылет А=435 мм., высота h=615мм, радиус закругления R=180 с приближенной массой m>k>=84 , погонная масса ковшей q>k>=168 кг/м.
Предварительно выбираем две тяговые пластинчатые втулочные цепи М1800 (ГОСТ 588-81), с разрывным усилием F>разр>=1800 kH, с шагом t=630 мм., погонная масса одной цепи q>цепи>=73,1 кг/м.
Условное обозначение предварительно выбранной цепи:
Цепь M1800 – 1 – 630 – 1 ГОСТ 588–81
Модель тяговой цепи указана в приложении
Предварительно выбираем тяговую звездочку, исходя из выбранной цепи. По ГОСТ 592 – 81 принимаем звездочку, с числом зубьев z=15, диаметром делительной окружности D>0>=t·d>0>=630·2,3048=1452 (мм), где d>0> коэффициент, зависящий от количества зубьев звездочки на один шаг цепи ([2], прил. LXXXIX, стр.556).
Чертеж тяговой звездочки указан в приложении.
Погонная масса ходовой части:

Погонная масса транспортируемого груза:
 ([5], форм. 7,
стр.34).
([5], форм. 7,
стр.34).
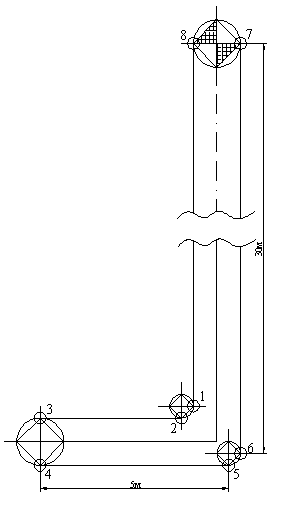
2. Расчет элеватора методом тягового обхода
Определим тяговое усилие элеватора методом обхода по его контуру. Разобьем трассу конвейера на отдельные участки, пронумеровав их границы в соответствии с точками натяжения цепи элеватора. Определим натяжение цепей в отдельных точках трассы конвейера. Обход начинаем с точки 1 (точка наименьшего натяжения), натяжение цепей в которой обозначается F>1>. Натяжение в каждой последующей точке равно сумме натяжения в предыдущей точке и сопротивления на участке между этими точками при обходе по ходу движения тягового органа:
F>i>>+1 >= F>i>> >+ F>i>>…(>>i>>+1)>
> >
>
Обход контура элеватора начинаем с точки 1. Минимальное натяжение для цепных элеваторов со звездочками примерно определяем из условия нормального зачерпывания груза:

Натяжение в точке 1 принимаем числено равным по рекомендуемому значению натяжения звездочки в данной точке, то есть F>1>=11(kH).
Между точками 1 и 2 происходит обход цепи по звездочке, следовательно натяжение в точке 2:
F>2>=k>ОБХ>·F>1>=1,1·11=12,1 (kH),
где k>ОБХ >– коэффициент обхода цепи по звездочке.
Между точками 2 и 3 находится прямолинейный горизонтальный участок длиной L=5 м., следовательно натяжение в точке 3:
F>3>=F>2>+W>ГОР>= F>2>+q>Х.Ч.>·g·L=12,1+314,2·g·5·10-3=12,1+15,4=27,5 (kH).
На участке 3 – 4 цепь обходит натяжное устройство, натяжение в точке 4:
F>4>=k>ОБХ>·F>3>=1,1·27,5=30,25 (kH).
Между точками 4 и 5 находится горизонтальный прямолинейный участок, на котором происходит зачерпывание известняка ковшами и его перемещение, это стоит учитывать при определении усилия на данном участке.
F>5>=F>4>+W’>ГОР>+W>ЗАЧ>=F>4>+(q>Х.Ч.>+q>П>)·g·L+q>П>·g·L·k>ЗАЧ>=30,25+(314,2+225)·g·5·10-3+ +225·g·5·1,2·10-3=30,25+26,95+13,3=70 (kH).
В данной формуле k>ЗАЧ> – коэффициент зачерпывания ([1], табл. 12.10, стр.215).
Между точками 5 и 6 происходит обход цепи по звездочке, следовательно натяжение в точке 6:
F>6>=k>ОБХ>·F>5>=1,1·70=77 (kH).
Участок между точками 6 и 7 – вертикальный, по которому происходит перемещение груза.
F>7>=F>6>+W>ВЕТВ>=F>6>+(q>Х.Ч.>+q>П>)·g·H=77+(314,2+225)·g·30·10-3=77+158,7=235,7 (kH).
В точке 8 происходит разгрузка груза, цепь обходит натяжную звездочку, так же учитывается провисание гибких элементов.
F>8>=k>ОБХ>·F>7>+q>Х.Ч.>·g·H=1,1·235,7+314,2·g·30·10-3=260+92,5=352,6 (kH).
Точка F>8> является последней точкой, при обходе контура, следовательно усилие в данной точке максимальное, и равно набегающему усилию на приводной вал, F>8>= F>СБ>

В цепном элеваторе при определении расчетного усилия в цепи должно учитываться динамическое усилие.

Динамическое усилие в цепи для элеватора с пластинчатой цепью определяется по формуле:
В данной формуле:
 – все
неравномерно
движущейся ходовой части и транспортируемого
груза, по всему периметру тягового
устройства,
– все
неравномерно
движущейся ходовой части и транспортируемого
груза, по всему периметру тягового
устройства,

z – число зубьев звездочки, z=15;
t – шаг цепи, t=630мм.


Расчетное натяжение одной цепи, для двухцепного тягового органа:

Разрушающая нагрузка цепи:
 ,
,
где K – коэффициент запаса прочности цепи, при условии наличия как горизонтальных так и вертикальных участков элеватора.
Данное значение разрушающей нагрузки удовлетворяет параметрам предварительно выбранной цепи.
3. Выбор компонентов привода конвейера
Мощность на приводном валу конвейера определяется по формуле:
 ([1],
форм.8.9, стр.162), где η>П.В.>
– КПД приводного вала, η>П.В.>=0,95
([1],
форм.8.9, стр.162), где η>П.В.>
– КПД приводного вала, η>П.В.>=0,95

Мощность привода конвейера:
 ([1],
форм.6.21, стр.145).
([1],
форм.6.21, стр.145).
В данной формуле:
k – коэффициент запаса, k=1,2;
η – КПД передач от двигателя к приводному валу, η=0,96 ([1], табл.5.1, стр127), в предложении, что в приводе будет использоваться двухступенчатый цилиндрический редуктор.
 (кВт)
(кВт)
Из
каталога ([1], табл. III.3.1,
стр302) выбираем электродвигатель
трехфазный асинхронный короткозамкнутый
серии 4А, закрытый обдуваемый, защищенный,
типа 4AH355S6Y3
(ГОСТ 19523-81) номинальной мощностью
P>ДВ>=200кВт,
частотой вращения n=985мин-1,
угловая скорость ротора двигателя
 (рад/с),
момент инерции ротора I>р>=7,8
кг·м2,
кратность максимально момента ψ>п>=1,0
номинальный момент на валу двигателя
(рад/с),
момент инерции ротора I>р>=7,8
кг·м2,
кратность максимально момента ψ>п>=1,0
номинальный момент на валу двигателя
 (H·м).
(H·м).
Частота вращения приводного вала конвейера:
 мин-1
мин-1
Необходимое передаточное отношение привода:
Так как полученное передаточное отношение значительно больше, нежели рекомендуемое для редукторов необходимой мощности, то принимаем конструкцию привода, схема которой предоставлена ниже.

Передаточное отношение распределяем между редуктором и открытой зубчатой передачей u=u>p>·u>ЗП>. Редуктор предварительно примем типа Ц2, с передаточным числом u>p>=31,5, следовательно передаточное число открытой передачи

Определяем мощность на тихоходном валу редуктора:
 (кВт),
(кВт),
где
 – КПД открытой зубчатой передачи.
– КПД открытой зубчатой передачи.
Угловая скорость тихоходного вала редуктора:
 (рад/с).
(рад/с).
Необходимый момент на тихоходной ступени редуктора:
 (кН·м).
(кН·м).
Из каталога выбираем редуктор цилиндрический трехступенчатый Ц2-1000 из каталога ([7], т2, табл. V.1.43) выбираем редуктор Ц2-1000, со следующими характеристиками: u>p>=31,5, вращающий момент на тихоходном валу M>ТИХ>=65 кН·м, при частоте вращения быстроходного вала n>Б.В.>=985 мин-1 и весьма тяжелом режиме работы (ПВ=65%), диаметр выходного вала d>Т.В.>=220мм.
Пересчитываем вращающий момент для непрерывной работы редуктор:
 (кН·м)
(кН·м)
Данное значение вращающего момента удовлетворяет необходимому моменту на тихоходной ступени, М>Т.В.><М’>ТИХ>→45,1<50.
Между электродвигателем и редуктором устанавливаем втулочно-пальцевую муфту с тормозным шкивом. Расчетный момент, для выбора муфты:
М>расч>=М>НОМ>·k>1>·k>2>=1939,1·1,55·1,2=3606(Н·м), где k>1> – коэффициент, учитывающий степень ответственности, k>2> – коэффициент условия работы. По каталогу ([7], т2, табл. V.2.41) принимаем муфт со следующими характеристиками: М>К>=4000 Н·м, I>МУВП>=6,9 кг·м2, m≤115кг. Устанавливаем на данную муфту тормозной шкив. Чертеж выбранной муфты указан а приложении.
Уточним скорость элеватора, исходя из полученного передаточного числа:
 (м/с)
([1], форм.8.16, стр.164).
(м/с)
([1], форм.8.16, стр.164).
Уточним производительность элеватора:
 (т/ч)
([1],
форм.12.29, стр.219).
(т/ч)
([1],
форм.12.29, стр.219).
Фактическая производительность удовлетворяет заданной, т.к. допускаемое отклонение ±10%
4. Проектирование приводного вала и подшипниковых узлов
Приводный вал цепного элеватора примем изготовленный из стали 45 нормализированной, с пределом прочности σ>В>=700Мпа, допускаемым напряжением на кручение [τ>К>]=20МПа.
Угловая скорость на приводном валу
 (рад/с).
(рад/с).
Крутящий момент на приводном валу
 (кН·м)
(кН·м)
Рассчитываем вал на усилия от изгиба и кручения.
Статическая нагрузка, действующая на приводные звездочки, а следовательно и на вал, численно равна:
F>СТ>=2·q>Х.Ч.>·g·H+q>П>·g·H=2·314,2>.>·g·30·10-3+225·g·30·10-3=251,2 (kH).
Статическая нагрузка, действующая а одной звездочке, или подшипнике:
 (кН).
(кН).
Исходя из полученной нагрузки, спроектируем эпюру изгибающих, при условии, что расстояние между звездочкой и подшипниковым узлом равно 100мм.
По моменту на приводном валу построим эпюру крутящих моментов, действующих на вал.

Так как крутящий момент значительно больше изгибающего, то определим диаметр вала из расчета на чистое кручение по пониженному допускаемому напряжению без учета влияния изгиба:
 (мм)
([8], форм. 8.16, стр.161).
(мм)
([8], форм. 8.16, стр.161).
Для обеспечения некоторого запаса прочности, принимаем диаметр выходного вала d>В>=230мм. Вал, для облегчения монтажа подшипниковых узлов и приводных звездочек, делаем ступенчатым, каждая последующая ступень которого больше в диаметре на 10мм.
Современные тенденции машиностроения требуют установки более качественной продукции. Выбираем пару сферических роликоподшипников, производства фирмы SKF, типа СС, с цилиндрическим отверстием. Параметры выбранного подшипника ([9], стр.724):
Внутренний диаметр d>i>=240мм, внешний диаметр d>0>=320мм, ширина подшипника В=60мм, номинальная частота вращения, динамическая грузоподъемность С=564кН, статическая грузоподъемность С>0>=1160кН, пограничная нагрузка по усталости P>u>=98кН, номинальная частота вращения n>НОМ>=1700 об/мин, придельная частота вращения n>ПР>=2000 об/мин, масса подшипника m=13,5 кг.
Условное обозначение выбранного подшипника:
SKF23948 CC/W33.
Определяем номинальную долговечность выбранного подшипника в часах:
 (часов)
(часов)
5. Проектирование открытой зубчатой передачи
Определим модуль цилиндрической передачи:
 ([8],
форм. 3.23, стр.41).
([8],
форм. 3.23, стр.41).
В данной формуле:
K>F> – коэффициент нагрузки, принимаем K>F>=1,5;
Y>F> – коэффициент, учитывающий форму зуба, принимаем Y>F>=3,61;
 – предел
выносливости,
для марки стали 40Х и объемной закалки,
принимаем
=550МПа;
– предел
выносливости,
для марки стали 40Х и объемной закалки,
принимаем
=550МПа;
 – коэффициент
зависимости ширины зуба от модуля,
принимаем
=20;
– коэффициент
зависимости ширины зуба от модуля,
принимаем
=20;
z>1> – количество зубьев в шестерне, z>1>=70;

Из конструктивных соображений, для удобства установки шестерни на тихоходный вал редуктора, принимаем модуль цилиндрической зубчатой передачи m=4.
Количество зубьев в колесе z>2>=u>ЗП>·z>1>=3,63·70=254,1, принимаем z>2>=254.
Межосевое расстояние передачи:
a>w>=0,5·m·(z>1>+z>2>)= 0,5·4·(70+254)=648(мм)
Данных пареметров необходимо и достаточно, для проектирования цилиндрической зубчатой передачи.
Шестерню выполняем штампованной, колесо – литым.
Основные параметры элементов проектируемой передачи:
|
Параметры |
Шестерня |
Колесо |
|
Делительный диаметр |
d>1>=m·z>1>= 4·70=280(мм) |
d>1>=m·z>1>= 4·254=1016(мм) |
|
Диаметр окружности вершин зубьев |
d>a1>=d>1>+2·m=280+2·4= =288(мм) |
d>a1>=d>1>+2·m=1016+2·4= =1024(мм) |
|
Диаметр окружности впадин зуба |
d>f1>=d>1>-2,5·m=280-2,5·4= =270(мм) |
d>f1>=d>1>-2,5·m=1016-2,5·4= =1006(мм) |
|
Ширина венца |
b=m·ψ>bm>= 4·20=80(мм) |
|
|
Диаметр ступицы |
d>CT2>=1,6·d>B>= =1,6·230=368(мм) |
|
|
Длина ступицы |
l>CT2>=1,25·d>B>= =1,25·230=290(мм) |
|
|
Толщина обода |
d>1>=4·m≈20(мм) |
|
|
Толщина диска |
C=0,3·b=0,3·80=20(мм) |
|
|
Диаметр центровой окружности |
d>02>=0,5·(d>f>>2>-2·δ+d>CT>>2>)= =0,5·(1006- 2·20+ +368)=667(мм) |
|
|
Диаметр отверстий |
d>ОТВ2>=0,25·(d>f>>2>-2·δ-d>CT>>2>)= =0,25·(1006-2·20-368)= =149,5(мм) |
6. Пуск и остановка элеватора
Проверим двигатель на достаточность пускового момента по продолжительности пуска. Время пуска элеватора:

([1], форм.5.40, стр.127).
В данной формуле:
δ – коэффициент, учитывающий влияние вращающихся масс привода, δ=1,2;
I – момент инерции ротора двигателя и муфты,
I=I>P>+I>МУВП>=7,8+6,9=14,7 (кг·м2);
n – частота вращения двигателя, n=985мин-1
η – КПД, учитывающий КПД подшипников узлов, открытой зубчатой передачи, редуктора и муфты, η≈0,85;
k>y> – коэффициент, учитывающий упругость тягового органа, для цепей конвейеров малой длины k>y>=0,95;
k>c> – коэффициент, учитывающий уменьшение скорости вращающихся частей конвейера относительно скорости тягового органа, для цепных конвейеров k>c>=0,6;
M>СР.П> – средний пусковой момент двигателя. Для двигателей с короткозамкнутым ротором:
 ([1],
форм.1.90, стр.36),
([1],
форм.1.90, стр.36),
где 0,852 – коэффициент, учитывающий возможность работы при падении напряжении в цепи до 85% от нормального.
 (Н·м);
(Н·м);
М>С> – момент статических сопротивлений на валу двигателя,
 (Н·м)
([1], форм.5.42, форм.5.43, стр.128)
(Н·м)
([1], форм.5.42, форм.5.43, стр.128)
Полученное значение удовлетворяет рекомендуемому времени пуска.
Момент статических сопротивлений на приводном валу элеватора, необходимый для предотвращения его обратного хода:
 ([1],
форм.5.39, форм.5.39, стр.127),
([1],
форм.5.39, форм.5.39, стр.127),
где k – коэффициент возможного уменьшения сопротивления конвейера, для цепного элеватора k=0,5.
Так как данное значение меньше нуля, то тормоз или останова в конструкции привода элеватора не требуется.
Но поскольку данный элеватор, по технологическому процессу, находится в постоянном движении, то для исключения аварийных ситуаций, связанных м перемещением гибкого элемента с ковшами без производственной необходимости, на быстроходном валу редуктора устанавливаем тормоз, который будет предупреждать несанкционированные рабочие движения элеватора. Выбираем тормоз, конструктивно совместимый с выбранной упругопальцевой муфтой.
Из каталога ([7], т2, табл. V.2.23) принимаем тормоз колодочный с гидровлическим толкателем ТКГ-500, со следующими характеристиками: М>Т>=2500Н·м, D>шк>=500мм, Н>шк>=200мм, δ=8мм, t>торм>=0,50с, t>раст>=0,40с, m=155кг; тип толкателя ТГМ-80.
7. Расчет натяжного устройства и направляющих устройств
Данный элеватор, по технологическому процессу, постоянно находится в движении. По этому принципу действия принимаем механическое натяжное устройство.
Выбираем натяжной пружинно-винтовой механизм с центральным расположением винта, ход натяжки l>Н>=800мм. Устанавливаем механизм между точками 3 и 4. Диаметр звездочек в данном механизме принимаем аналогичный приводным звездочкам.
Крутящий момент в точках 3 и 4:
 (кН·м)
(кН·м)
Вал натяжного устройства, на котором устанавливаются звездочки, примем изготовленным из стали 45 нормализированной, с пределом прочности σ>В>=700Мпа, допускаемым напряжением на кручение [τ>K>]=20МПа.
По крутящему моменту определим диаметр вала:
 (мм)
(мм)
Для обеспечения некоторого запаса прочности, принимаем диаметр вала d>B>=250мм, данное значение позволяет использовать дубликат пары приводных звездочек в механизме натяжения. Вал делаем ступенчатым, каждая последующая ступень которого больше в диаметре на 10мм.
Из конструктивных соображений, выбираем пару сферических роликоподшипников, производства фирмы SKF, типа СС, с цилиндрическим отверстием. Параметры выбранного подшипника ([9], стр.724):
Внутренний диаметр d>i>=260мм, внешний диаметр d>0>=360мм, ширина подшипника В=75мм, номинальная частота вращения, динамическая грузоподъемность С=880кН, статическая грузоподъемность С>0>=1800кН, пограничная нагрузка по усталости P>u>=156кН, номинальная частота вращения n>НОМ>=1500 об/мин, придельная частота вращения n>ПР>=1900 об/мин, масса подшипника m=23,5 кг.
Условное обозначение выбранного подшипника:
SKF23952 CC/W33.
Определяем номинальную долговечность выбранного подшипника в часах:
 (часов)
(часов)
Рассчитываем пружину натяжного устройства.
Расчетное усилие пружины:
 (кН)
(кН)
Предельное усилие при полностью сжатой пружине:
F>ПР>=k>З>·F>Р.П.>=1,4·28,875=40,425 (kH) ([2], стр.88),
где k>З> – коэффициент запаса.
Предварительно принимаем пружину 1-го класса, 4-го разряда, изготовленную из стали 60С2А (ГОСТ 13769-86).
Диаметр проволоки пружины из условия деформации при круцении:
 (мм)
([2], форм.172, стр.88),
(мм)
([2], форм.172, стр.88),
где k – коэффициент кривизны, λ – отношение среднего диаметра пружины к диаметру проволоки.
Средний диаметр пружины:
D=λ·d=10·50=500 (мм).
Наименьший зазор между витками в рабочем состоянии:
δ=0,2·d=0,2·50=10 (мм).
Шаг рабочих витков:
t=δ+d=10+50=60 (мм)
Длина пружины в свободном состоянии:
L≈k·D=2·500=1000 (мм), где – коэффициент, который учитывает длину пружины при отсутствии направляющих. Принимаем L=1000мм.
В натяжном устройстве, которое установлено на промежутке 1-2 и 5-6 устанавливаем звездочку, аналогичную приводной, установленную на ось. В данной конструкции применяем подшипник SKF23952 CC/W33.
Литература
1 – "Справочник по расчетам механизмов подъемно-транспортных машин", Кузьмин А.В., Марон Ф.Л., Минск, 1983;
2 – "Расчеты грузоподъемных и транспортирующих машин", Иванченко Ф.К., Бондарев В.С., Киев, 1978;
3 – "Транспортирующие машины", Спиваковский А.О., Дьячков В.К., Москва, 1983;
4 – "Машины непрерывного транспорта", Плавинский В.И., Москва, 1969;
5 – "Машины непрерывного транспорта", Зенков Р.Л., Ивашков И.И., Колобов Л.Н., Москва, 1987;
6 – "Транспортирующие машины: атлас конструкций", Спиваковский А.О., Бржезовский С.М., Дьячков В.К., Кузнецов Л.В., Чусов В.И., Шевлягин А.К., Москва, 1971;
7 – "Гохберг"
8 – "Курсовое проектирование деталей машин", Чернавский С.А., Боков К.Н., Чернин И.М., Ицкович Г.М., Козинцов В.П., Москва, 1988;
9 – Общий каталог подшипников SKF, 2008.
10 – "Подьемно-транспортные машины" Александров М.П., Решетов Д.Н., Байков Б.А. Москва 1987