Автоматическая система управления питания котельных агрегатов
Содержание
1. Введение
2. Анализ современного состояния АПП
2.1. Причины появления АСУ ТП. Общие понятия
2.2. Назначение, цель и функции АСУ ТП
2.3. АСУ ТП пара в котельной
3. Определение параметров объекта регулирования
3.1. Идентификация передаточной функции объекта
4. Выбор типового регулятора АСР и определение параметров его настройки
5. Анализ динамических характеристик АСР с типовым регулятором
6. Построение переходного процесса АСР с использованием ПИ-регулятора
6.1. Построение переходного процесса при помощи пакета Simulink
6.2. Расчет одноконтурной цифровой АСР
7. Выбор технических средств автоматизации
7.1. Датчики
7.1.1. Пружинный манометр
7.1.2. Электроконтактный манометр
7.1.3. Уровнемер
7.2. Контроллер
8. Заключение
9. Библиографический список
Введение
Автоматизация производства представляет собой процесс передачи функции контроля и управления производством от человека автоматическим устройством.
При создании автоматизированных систем следует принимать во внимание уровень технологии и оборудования, состояние организации и управления производством. Нельзя автоматизацию производства сводить лишь к автоматизации управления, если технологические процессы и основное оборудование остаются на прежнем уровне.
В строительной индустрии автоматизация производства внедряется как на заводах строительных материалов, так и в строительстве. Особенно успешно автоматизируются заводы по производству цемента. На некоторых заводах по производству цемента внедрены и успешно действуют управляющие вычислительные машины. В зависимости от степени автоматизации функции управления различают: ручное, автоматизированное и автоматическое управление. При ручном управлении все функции процесса выполняет человек—оператор. В автоматизированном управлении часть функций выполняет человек, а другую часть — автоматические устройства. При автоматическом управлении все функции выполняют автоматические устройства.
В зависимости от характера и объема операций, выполняемых автоматическими устройствами, различают следующие виды автоматизации:
автоматический контроль, при котором с помощью приборов осуществляется измерение величины, ее регистрация, указание ее значения, автоматическая сигнализация максимальных или минимальных значений;
автоматическое управление регулирующими органами в объекте регулирования;
автоматическое регулирование, автоматическое поддержание заданных значений каких-либо физических величин в заранее принятых условиях.
Перечисленные виды автоматизации могут быть реализованы либо с помощью приборов, снабженных показывающим, записывающим и регулирующим устройством, и предназначенных обычно для контроля и автоматического управления одним параметром, либо с помощью вычислительных машин, контролирующих и управляющих большим числом параметров.
Приборы контроля и автоматического регулирования классифицируют следующим образом:
измерительные преобразователи (датчики), позволяющие измерить контролируемую (или регулируемую) величину и преобразовать ее в сигнал, удобный для дальнейшего использования;
вторичные приборы, действующие совместно с датчиками и позволяющие записывать, показывать контролируемую величину, сигнализировать о ее каких-либо отклонениях, преобразовывать и передавать сигнал на автоматические регуляторы;
автоматические регуляторы, воспринимающие сигнал от датчика о действительном значении регулируемой величины, а от задатчика — о заданном значении регулируемой величины; сравнивающие их, в случае различия усиливающие разность этих величин (рассогласование), воздействующие через исполнительные устройства на регулирующий орган для приведения регулируемой величины в соответствие с заданным значением;
исполнительные устройства, позволяющие воздействовать на регулирующий орган для изменения подачи вещества или энергии в регулируемый объект;
сигнализирующие устройства (сигнальные лампы, звонки, сирены), позволяющие известить о достижении регулируемой величиной определенного уровня или аварийного значения.
Измерительные преобразователи (датчики) следует выбирать по виду контролируемого (или регулируемого) параметра — температуры, давления, расхода, уровня и т. д. с учетом пределов значений измеряемых величин. После того, как определен тип датчика, следует выбрать вторичный прибор. Например, термопару применяют с автоматическим электронным потенциометром, который снабжен показывающим и записывающим устройствами (выпускают также потенциометры с регулирующим устройством). Потенциометры выбирают в зависимости от пределов контролируемых значений, а также в зависимости от того, каким образом необходимо контролировать величину (запись, сигнализация, передача на щит управления и т. д.). Автоматические регуляторы выбирают с учетом различных факторов, главным образом условий регулирования технологического параметра.
2. Анализ литературных источников по теме курсового проекта
2.1 Причины появления АСУ ТП. Общие понятия
АСУ ТП называют человеко-машинными системами управления, в которых человек принимает окончательные решения по управлению технологическим процессом. АСУ ТП возникли как следствие научно-технического прогресса в промышленности. Рост масштабов производства, увеличение единичной мощности машин и установок, энергосберегающая и безотходная технология, переход на поточные и непрерывные способы производства, усложнение технологических процессов, использование форсированных и критических режимов на границе устойчивости — вот далеко не полный перечень технологических причин появления АСУ ТП. К этому необходимо добавить некоторые социально-экономические предпосылки: перевод промышленности на интенсивный путь развития, повышение требований к техническому уровню и эффективности функционирования систем управления, необходимость реализации значительных производственных резервов оборудования и повышение общего уровня организации производства и его культуры, улучшение стиля и эффективности руководства, технологической и трудовой дисциплины и т. д. Таким образом, АСУ ТП — это система, которая при участии оперативного персонала в реальном времени обеспечивает автоматизированное управление процессом изготовления (переработки) продукта по заданным технологическим и технико-экономическим критериям.
Предшественниками АСУ ТП были традиционные системы локальной автоматики, такие, как АСР, автоматический контроль, сигнализация, защита и т. п., устанавливаемые на отдельных агрегатах технологического процесса. АСР при этом поддерживала на заданном уровне один из параметров процесса или соотношение двух параметров. При наличии взаимосвязанных параметров применялись специальные компенсаторы для автономных АСР, для компенсации возмущений применялись инвариантные АСР, при изменении характеристик оборудования применялись адаптивные АСР.
В отличие от локальных АСР АСУ ТП подходит к управлению технологическим процессом (ТП) как к единому целому, во всей сложности взаимосвязей его параметров. АСУ ТП автоматизирует сам процесс принятия решений по оптимальному управлению ТП. Автоматизированный сбор и рутинная обработка информации, вычисление технико-экономических показателей, оптимальных по некоторым критериям режимов, выполняется с помощью ЭВМ (или комплекса ЭВМ), что позволяет человеку принять быстрое и оптимальное решение в сложных условиях, в том числе для задач, не поддающихся полной формализации при создании математической модели управления ТП.
АСУ ТП способна выдавать различную информацию. Технологи-операторы получают оперативную информацию в темпе с ТП и текущие технико-экономические показатели (ТЭП), что позволяет своевременно корректировать режимы и нагрузки агрегатов. Руководители цехов, руководство предприятия и АСУ высших уровней получают информацию о деятельности персонала, предаварийных и аварийных ситуациях, состоянии оборудования для проведения мероприятий по укреплению технологической дисциплины, квалификации персонала, надежности оборудования, об обосновании сроков и объемов капитальных ремонтов.
В иерархии систем управления промышленностью АСУ ТП образуют нижнюю ступень. От автоматизированных систем управления более высокого уровня АСУ ТП отличает преобладание задач оперативного управления над задачами организационно-экономического типа.
По степени охвата управляемого процесса АСУ ТП подразделяются на локальные и комплексные. Под локальной АСУ ТП понимается управление отдельной частью технологического процесса или технологической операцией. Локальные АСУ ТП автономно функционируют как подсистемы комплексной АСУ ТП, которая решает также задачи организационно-технологического управления по технико-экономическим показателям.
АСУ ТП используют различные типы ЭВМ. В локальных подсистемах применяются микро-ЭВМ и мини-ЭВМ, для решения оптимизационных и технико-экономических задач — средние и большие ЭВМ.
2.2 Назначение, цель и функции АСУ ТП. Подсистемы и виды обеспечения АСУ ТП
Назначение АСУ ТП заключается в целенаправленном ведении ТП и обеспечении информацией смежных и вышестоящих органов и систем управления.
Цель управления математически формулируется обычно в виде критерия управления и часто сводится к получению максимального экономического эффекта с учетом плановых, экономических и технических ограничений. В частном случае это может быть максимальная производительность, минимальная стоимость, минимальный расход дорогого сырья и т. д.
Практически цель управления реализуется путем стабилизации параметров процесса на входе и заданных параметров готовой продукции, оптимизации и согласования режимов работы агрегатов, обеспечения безопасности функционирования ТП.
Функции АСУ ТП направлены на выполнение поставленных частных целей управления и выполняются комплексом технических средств (КТС) и персоналом.
Информационные функции обеспечивают контроль основных параметров процесса и сигнализацию об отклонении от этих параметров; измерение и регистрацию по вызову; запросы оператора; вычисление ТЭП, показателей качества продукции и процесса; периодическую регистрацию и др. Совокупность информационных функций составляет информационную подсистему АСУ ТП.
Управляющие функции обеспечивают выработку и реализацию управляющих воздействий на объект управления, стабилизацию параметров, программное изменение режима, защиту, формирование и реализацию оптимальных управляющих воздействий, распределение нагрузок между агрегатами, управление пусками и остановами агрегатов и т. д. Совокупность управляющих функций составляет управляющую подсистему АСУ ТП (рис.1). Кроме вышеперечисленных основных (внешних) функций имеются служебные (внутренние) функции АСУ ТП: контроль за правильностью функционирования, связь с АСУ более высокого уровня, слежение за астрономическим временем и отсчет временных интервалов.
АСУ ТП выполняет свои функции в условиях непрерывного взаимодействия людей и комплекса технических средств. Это взаимодействие осуществляется при определенном организационном и программном обеспечении на базе математического обеспечения. Для обмена информацией в АСУ ТП принимаются определенные соглашения о формах массивов документов, шкалах приборов, кодах и правилах расшифровки, т. е. создается информационное обеспечение.
Техническое обеспечение состоит из комплекса технических средств (КТС) для выполнения перечисленных выше функций АСУ ТП. Технические средства для сбора, передачи, преобразования и отображения информации, вычислительные, управляющие и исполнительные устройства. Сюда же относят приборы для тестирования и наладки КТС. КТС имеет определенное территориальное размещение. Так, на технологических агрегатах могут быть установлены первичные измерительные преобразователи (датчики), регулирующие органы, запорная арматура и средства, информирующие о включении или выключении технологического оборудования.
В непосредственной близости от технологического оборудования устанавливают местные щиты управления, на которых монтируются регуляторы, показывающие и самопишущие вторичные приборы, а также другие приборы и узлы локальной автоматики для постоянного персонала или обходчиков.
Операторы технологического процесса постоянно находятся в операторском пункте, который оборудован щитами, пультами, а также электрифицированной печатающей машинкой, предназначенной для регистрации технологических параметров процесса по вызову оператора.
На центральном щите управления (ЦЩУ) дежурного инженера или диспетчера расположены вторичные приборы, а также показывающие и самопишущие приборы; цифровые приборы, показывающие по вызову оператора значение измеряемого технологического параметра; дисплеи, осуществляющие визуальный вывод или буквенно-симсольной информации на экране электроннолучевых трубок; мнемосхема технологического процесса с сигнальными табло. При контроле и управлении отдаленными технологическими процессами в состав технических средств АСУ ТП входят системы телеконтроля и телеуправления.
Вычислительный комплекс (ВК) АСУ ТП размещается в специально оборудованном помещении на ЦЩУ и состоит из одной или нескольких специализированных управляющих ЭВМ типов М-6000, М-7000, М-1800 и др. ВК может работать в информационном режиме, режиме «Советчика оператора», «Непосредственного цифрового управления» и др.
В состав ВК АСУ ТП входят устройства информационной подсистемы, а именно: коммутаторы и концентраторы сигналов, аналого-цифровые преобразователи (АЦП), устройства памяти предельных значений параметров, устройства масштабирования (для вычисления абсолютных значений параметров), опроса состояния двухпозиционных устройств и т. п. ; устройства управляющей подсистемы — арифметическое устройство (АУ), оперативная и постоянная память (ОЗУ) и (ПЗУ) на магнитных дисках (МД) и магнитных лентах (МЛ), устройство связи с периферией ВК, цифро-аналоговые преобразователи (ЦАП), устройства цифрового управления исполнительными механизмами и сигнальными табло, устройства аналогового управления регуляторами, пульт оператора и т. п. Эти устройства кратко рассмотрены в четвертой главе. Комплекс технических средств называют иногда термином «твердый товар».
Информационное обеспечение определяет способы и формы отображения информации о состоянии объекта для ввода в ЭВМ и для представления оператору в виде документов, графиков, изображений на дисплее и в виде управляющих сигналов для АСР, системы сигнализации, защиты и т. д.
Математическое обеспечение (МО) является идеологическим содержанием АСУ ТП. В него включаются математические методы, модели и алгоритмы, позволяющие провести математическую формализацию функций АСУ ТП. Математическая модель объекта может уточняться во время эксплуатации на основании информации о состоянии объекта.
Алгоритмы представляют собой определенную последовательность элементарных операций сложения и вычитания и логических операций, доступных ЭВМ и позволяющих обрабатывать информацию о процессе а вычислять различную выходную информацию, в том числе и управляющие воздействия для регулирования и управления процессом. В последнем случае вычисления производятся в темпе с процессом или даже в опережающем темпе.
Различают внутреннее и внешнее МО, которое иногда называют специальным математическим обеспечением (СМО). К внутреннему МО относятся алгоритмы функционирования собственно вычислительного комплекса: операционная система, обеспечивающая начальный пуск и оперативную координацию работы отдельных устройств; трансляторы с алгоритмических языков; вычисление типовых функций; тесты. Внешнее МО для каждой АСУ ТП специфично. Разработка внешнего МО включает в себя формализацию задач, выбор метода и определение алгоритма. Внешнее Мр получает отражение в алгоритмической структуре АСУ ТП, которая содержит перечень и порядок решения задач в зависимости от производственной ситуации.
Программное обеспечение (ПО) разрабатывается при проектировании АСУ ТП на базе математического обеспечения. ПО обеспечивает разработку и эксплуатацию программ на ЭВМ. На логическом уровне в ЭВМ можно выделить устройство для выполнения программ, сами программы и данные в виде чисел или текстов.
Программы как последовательность действий над данными и данные записываются в память ЭВМ, и устройство выполнения программ последовательно вызывает и выполняет команды программ по вводу данных с различных устройств ввода, преобразованию и выводу данных на разнообразные устройства вывода. ПО имеет в своем составе управляющие программы (часть операционной системы (ОС), программы управления данными (системы управления базой данных (СУБД), а также программы связи оператора с ОС и СУБД.
Программы могут быть записаны на языках Ассемблера, АЛМО, что экономит объем памяти ЭВМ, но усложняет труд программиста: на алгоритмических языках ФОРТРАН, АЛГОЛ, ПЛ/1, БЕЙСИК возможна упрощенная запись команд, но требуется больший объем памяти.
Программы работают по своему регламенту, исполнение очереди программ производится в соответствии с приоритетами. Программы хранятся в ОЗУ и в ПЗУ (в регистрах, на магнитных лентах и дисках). Все многообразие программ делится на общее программное обеспечение (ОПО), для создания которого используется внутреннее МО, и специальное программное обеспечение (СПО), для которого используется СМО. ОПО поставляется в комплекте с ЭВМ и включает в себя программу-диспетчер, программы управления отдельными устройствам, служебные и стандартные подпрограммы (статистика, логарифмы, синусы и т. д.), трансляторы с алгоритмических языков в машинные, тесты для проверки технических средств. СПО разрабатывается для конкретной системы и должно обеспечивать выполнение всех функций АСУ ТП, а также допустить наращивание программы с учетом развития системы. СПО может компоноваться из отдельных модулей на ЭВМ организации-разработчика АСУ ТП, например ЕС-1022, ЕС-1033, M-i030, а созданные программы исполняются на ЭВМ М-6000, M-7G00, СМ, «Электроника-100» и др., используемых в АСУ ТП.
В настоящее время начинает применяться генерация СПО с помощью функционально законченных элементов с настраиваемыми входами и выходами — алгоритмических и программных модулей. Создаются библиотеки таких модулей для АСУ ТП в разных отраслях.

 0100090000032a0200000200a20100000000a201000026060f003a03574d4643010000000000010050690000000001000000180300000000000018030000010000006c0000000000000000000000350000006f0000000000000000000000c02c0000401a000020454d46000001001803000012000000020000000000000000000000000000007f120000771a0000c80000001f010000000000000000000000000000000f030058600400160000000c000000180000000a0000001000000000000000000000000900000010000000910a000036060000250000000c0000000e000080250000000c0000000e000080120000000c00000001000000520000007001000001000000a4ffffff00000000000000000000000090010000000000cc04400022430061006c00690062007200690000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000110040ae110010000000a4b1110024af1100524f6032a4b111009cae1100100000000cb0110088b11100244f6032a4b111009cae11002000000049642f319cae1100a4b1110020000000ffffffff5c3ce500d0642f31ffffffffffff0180ffff0180dfff0180ffffffff00a9000000000000000000000100000001000000000000005802000025000000372e9001cc00020f0502020204030204ef0200a07b20004000000000000000009f00000000000000430061006c00690062007200000000000000000064af1100dee32e31e88d0832c4b21100d0ae11009c38273108000000010000000caf11000caf1100e87825310800000034af11005c3ce5006476000800000000250000000c00000001000000250000000c00000001000000250000000c00000001000000180000000c0000000000000254000000540000000000000000000000350000006f00000001000000e7298740a48e87400000000057000000010000004c000000040000000000000000000000920a000034060000500000002000ffff3600000046000000280000001c0000004744494302000000ffffffffffffffff920a000037060000000000004600000014000000080000004744494303000000250000000c0000000e000080250000000c0000000e0000800e000000140000000000000010000000140000000400000003010800050000000b0200000000050000000c02e5008201040000002e0118001c000000fb020200010000000000bc02000000cc0102022253797374656d0000000000000000000000000000000000000000000000000000040000002d010000040000002d01000004000000020101001c000000fb02f3ff0000000000009001000000cc0440002243616c6962726900000000000000000000000000000000000000000000000000040000002d010100040000002d010100040000002d010100050000000902000000020d000000320a0d00000001000400000000008101e60020a00800040000002d010000040000002d010000030000000000
0100090000032a0200000200a20100000000a201000026060f003a03574d4643010000000000010050690000000001000000180300000000000018030000010000006c0000000000000000000000350000006f0000000000000000000000c02c0000401a000020454d46000001001803000012000000020000000000000000000000000000007f120000771a0000c80000001f010000000000000000000000000000000f030058600400160000000c000000180000000a0000001000000000000000000000000900000010000000910a000036060000250000000c0000000e000080250000000c0000000e000080120000000c00000001000000520000007001000001000000a4ffffff00000000000000000000000090010000000000cc04400022430061006c00690062007200690000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000110040ae110010000000a4b1110024af1100524f6032a4b111009cae1100100000000cb0110088b11100244f6032a4b111009cae11002000000049642f319cae1100a4b1110020000000ffffffff5c3ce500d0642f31ffffffffffff0180ffff0180dfff0180ffffffff00a9000000000000000000000100000001000000000000005802000025000000372e9001cc00020f0502020204030204ef0200a07b20004000000000000000009f00000000000000430061006c00690062007200000000000000000064af1100dee32e31e88d0832c4b21100d0ae11009c38273108000000010000000caf11000caf1100e87825310800000034af11005c3ce5006476000800000000250000000c00000001000000250000000c00000001000000250000000c00000001000000180000000c0000000000000254000000540000000000000000000000350000006f00000001000000e7298740a48e87400000000057000000010000004c000000040000000000000000000000920a000034060000500000002000ffff3600000046000000280000001c0000004744494302000000ffffffffffffffff920a000037060000000000004600000014000000080000004744494303000000250000000c0000000e000080250000000c0000000e0000800e000000140000000000000010000000140000000400000003010800050000000b0200000000050000000c02e5008201040000002e0118001c000000fb020200010000000000bc02000000cc0102022253797374656d0000000000000000000000000000000000000000000000000000040000002d010000040000002d01000004000000020101001c000000fb02f3ff0000000000009001000000cc0440002243616c6962726900000000000000000000000000000000000000000000000000040000002d010100040000002d010100040000002d010100050000000902000000020d000000320a0d00000001000400000000008101e60020a00800040000002d010000040000002d010000030000000000
Рис.1. « Обобщенная функционально-информационная структурная схема АСУ ТП»
Перспективны для создания МО и ПО системы автоматизированного проектирования— САПР
Программное обеспечение иногда называют термином «мягкий товар». Относительная стоимость ПО непрерывно растет г: в настоящее время превышает стоимость КТС АСУ ТП.
2.3 АСУ ТП пара в котельной
Регулирование питания котельных агрегатов и регулирование давления в барабане котла главным образом сводится к поддержанию материального баланса между отводом пара и подачей воды. Параметром характеризующим баланс, является уровень воды в барабане котла. Надежность работы котельного агрегата во многом определяется качеством регулирования уровня. При повышении давления, снижение уровня ниже допустимых пределов, может привести к нарушению циркуляции в экранных трубах, в результате чего произойдет повышение температуры стенок обогреваемых труб и их пережег.
Повышение уровня также ведет к аварийным последствиям, так как возможен заброс воды в пароперегреватель, что вызовет выход его из строя. В связи с этим, к точности поддержания заданного уровня предъявляются очень высокие требования. Качество регулирования питания также определяется равенством подачи питательной воды. Необходимо обеспечить равномерное питание котла водой, так как частые и глубокие изменения расхода питательной воды могут вызвать значительные температурные напряжения в металле экономайзера.
Барабанам котла с естественной циркуляцией присуща значительная аккумулирующая способность, которая проявляется в переходных режимах. Если в стационарном режиме положение уровня воды в барабане котла определяется состоянием материального баланса, то в переходных режимах на положение уровня влияет большое количество возмущений. Основными из них являются изменение расхода питательной воды, изменение паросъема котла при изменении нагрузки потребителя, изменение паропроизводительности при изменении при изменении нагрузки топки, изменение температуры питательной воды.
Регулирование соотношения газ-воздух необходимо как чисто физически, так и экономически. Известно, что одним из важнейших процессов, происходящих в котельной установке, является процесс горения топлива. Химическая сторона горения топлива представляет собой реакцию окисления горючих элементов молекулами кислорода. Для горения используется кислород, находящийся в атмосфере. Воздух в топку подается в определенном соотношении с газом посредством дутьевого вентилятора.
Соотношение газ-воздух примерно составляет 1.10. При недостатке воздуха в топочной камере происходит неполное сгорание топлива. Не сгоревший газ будет выбрасываться в атмосферу, что экономически и экологически не допустимо. При избытке воздуха в топочной камере будет происходить охлаждение топки, хотя газ будет сгорать полностью, но в этом случае остатки воздуха будут образовывать двуокись азота, что экологически недопустимо, так как это соединение вредно для человека и окружающей среды.
Система автоматического регулирования разряжения в топке котла сделана для поддержания топки под наддувом, то есть чтобы поддерживать постоянство разряжения (примерно 4мм.вод.ст.). При отсутствии разряжения пламя факела будет прижиматься, что приведет к обгоранию горелок и нижней части топки. Дымовые газы при этом пойдут в помещение цеха, что делает невозможным работу обслуживающего персонала.
В питательной воде растворены соли, допустимое количество которых определяется нормами. В процессе парообразования эти соли остаются в котловой воде и постепенно накапливаются. Некоторые соли образуют шлам - твердое вещество, кристаллизующееся в котловой воде. Более тяжелая часть шлама скапливается в нижних частях барабана и коллекторов.
Повышение концентрации солей в котловой воде выше допустимых величин может привести к уносу их в пароперегреватель. Поэтому соли, скопившиеся в котловой воде, удаляются непрерывной продувкой, которая в данном случае автоматически не регулируется. Расчетное значение продувки парогенераторов при установившемся режиме определяется из уравнений баланса примесей к воде в парогенераторе. Таким образом, доля продувки зависит от отношения концентрации примесей в воде продувочной и питательной. Чем лучше качество питательной воды и выше допустимая концентрация примесей в воде, тем доля продувки меньше. А концентрация примесей в свою очередь зависит от доли добавочной воды, в которую входит , в частности , доля теряемой продувочной воды.
Сигнализация параметров и защиты, действующие на останов котла , физически необходимы, так как оператор или машинист котла не в силах уследить за всеми параметрами функционирующего котла. Вследствие этого может возникнуть аварийная ситуация. Например, при впуске воды из барабана, уровень воды в нем понижается, вследствие этого может быть нарушена циркуляция и вызван пережег труб донных экранов. Сработавшая без промедления защита, предотвратит выход из строя парогенератора. При уменьшении нагрузки парогенератора, интенсивность горения в топке снижается. Горение становится неустойчивым и может прекратиться. В связи с этим предусматривается защита по погашению факела.
Надежность защиты в значительной мере определяется количеством, схемой включения и надежностью используемых в ней приборов. По своему действию защиты подразделяются на действующие на основе парогенератора; снижение нагрузки парогенератора; выполняющие локальные операции.
Согласно вышеперечисленного автоматизация работы парового котла должна осуществляться по следующим параметрам:
по поддержанию постоянного давления пара;
по поддержанию постоянного уровня воды в котле;
по поддержанию соотношения "газ - воздух";
по поддержанию разрежения в топочной камере.
3. Определение параметров объекта регулирования
3.1 Идентификация передаточной функции объекта
Данные для расчёта даны в методическом указании для выполнения курсовой работы.
По данным экспериментальной кривой разгона технологического объекта управления строим кривую:
Данные экспериментальной кривой ТОУ.
|
Р, кПа |
80,0 |
80,1 |
80,1 |
80,2 |
80,3 |
80,8 |
81,1 |
81,5 |
83,0 |
84,0 |
87,9 |
90,0 |
|
t, с |
0 |
20 |
40 |
60 |
100 |
160 |
200 |
250 |
400 |
500 |
1000 |
3000 |
По данным экспериментальной кривой разгона технологического объекта управления строим кривую разгона:
|
t, c |
Р, кПа |
|
0 |
80 |
|
20 |
80,1 |
|
40 |
80,1 |
|
60 |
80,2 |
|
100 |
80,3 |
|
160 |
80,8 |
|
200 |
81,1 |
|
250 |
81,5 |
|
400 |
83 |
|
500 |
84 |
|
1000 |
87,9 |
|
3000 |
90 |
|
t+tзапазд, c |
Р, кПа |
|
125 |
80 |
|
145 |
80,3477904 |
|
165 |
80,68348499 |
|
185 |
81,00750444 |
|
225 |
81,62212801 |
|
285 |
82,46620234 |
|
325 |
82,9811261 |
|
375 |
83,57557446 |
|
525 |
85,07354092 |
|
625 |
85,87267565 |
|
1125 |
88,29651937 |
|
3125 |
89,95056761 |
С помощью касательной к экспериментальной кривой в точке перегиба определяем Т>об> и τ: Т>об>=600 с, Τ>о> = 125 с
По формуле:
строим эквивалентную кривую с запаздыванием на 180 сек.

 0100090000032a0200000200a20100000000a201000026060f003a03574d4643010000000000010050690000000001000000180300000000000018030000010000006c0000000000000000000000350000006f0000000000000000000000c02c0000401a000020454d46000001001803000012000000020000000000000000000000000000007f120000771a0000c80000001f010000000000000000000000000000000f030058600400160000000c000000180000000a0000001000000000000000000000000900000010000000910a000036060000250000000c0000000e000080250000000c0000000e000080120000000c00000001000000520000007001000001000000a4ffffff00000000000000000000000090010000000000cc04400022430061006c00690062007200690000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000110040ae110010000000a4b1110024af1100524f6032a4b111009cae1100100000000cb0110088b11100244f6032a4b111009cae11002000000049642f319cae1100a4b1110020000000ffffffff5c3ce500d0642f31ffffffffffff0180ffff0180dfff0180ffffffff00a9000000000000000000000100000001000000000000005802000025000000372e9001cc00020f0502020204030204ef0200a07b20004000000000000000009f00000000000000430061006c00690062007200000000000000000064af1100dee32e31e88d0832c4b21100d0ae11009c38273108000000010000000caf11000caf1100e87825310800000034af11005c3ce5006476000800000000250000000c00000001000000250000000c00000001000000250000000c00000001000000180000000c0000000000000254000000540000000000000000000000350000006f00000001000000e7298740a48e87400000000057000000010000004c000000040000000000000000000000920a000034060000500000002000ffff3600000046000000280000001c0000004744494302000000ffffffffffffffff920a000037060000000000004600000014000000080000004744494303000000250000000c0000000e000080250000000c0000000e0000800e000000140000000000000010000000140000000400000003010800050000000b0200000000050000000c02e5008201040000002e0118001c000000fb020200010000000000bc02000000cc0102022253797374656d0000000000000000000000000000000000000000000000000000040000002d010000040000002d01000004000000020101001c000000fb02f3ff0000000000009001000000cc0440002243616c6962726900000000000000000000000000000000000000000000000000040000002d010100040000002d010100040000002d010100050000000902000000020d000000320a0d00000001000400000000008101e60020a00800040000002d010000040000002d010000030000000000
0100090000032a0200000200a20100000000a201000026060f003a03574d4643010000000000010050690000000001000000180300000000000018030000010000006c0000000000000000000000350000006f0000000000000000000000c02c0000401a000020454d46000001001803000012000000020000000000000000000000000000007f120000771a0000c80000001f010000000000000000000000000000000f030058600400160000000c000000180000000a0000001000000000000000000000000900000010000000910a000036060000250000000c0000000e000080250000000c0000000e000080120000000c00000001000000520000007001000001000000a4ffffff00000000000000000000000090010000000000cc04400022430061006c00690062007200690000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000110040ae110010000000a4b1110024af1100524f6032a4b111009cae1100100000000cb0110088b11100244f6032a4b111009cae11002000000049642f319cae1100a4b1110020000000ffffffff5c3ce500d0642f31ffffffffffff0180ffff0180dfff0180ffffffff00a9000000000000000000000100000001000000000000005802000025000000372e9001cc00020f0502020204030204ef0200a07b20004000000000000000009f00000000000000430061006c00690062007200000000000000000064af1100dee32e31e88d0832c4b21100d0ae11009c38273108000000010000000caf11000caf1100e87825310800000034af11005c3ce5006476000800000000250000000c00000001000000250000000c00000001000000250000000c00000001000000180000000c0000000000000254000000540000000000000000000000350000006f00000001000000e7298740a48e87400000000057000000010000004c000000040000000000000000000000920a000034060000500000002000ffff3600000046000000280000001c0000004744494302000000ffffffffffffffff920a000037060000000000004600000014000000080000004744494303000000250000000c0000000e000080250000000c0000000e0000800e000000140000000000000010000000140000000400000003010800050000000b0200000000050000000c02e5008201040000002e0118001c000000fb020200010000000000bc02000000cc0102022253797374656d0000000000000000000000000000000000000000000000000000040000002d010000040000002d01000004000000020101001c000000fb02f3ff0000000000009001000000cc0440002243616c6962726900000000000000000000000000000000000000000000000000040000002d010100040000002d010100040000002d010100050000000902000000020d000000320a0d00000001000400000000008101e60020a00800040000002d010000040000002d010000030000000000
Рис.3 Кривая разгона объекта
Найдем среднеквадратическое отклонение экспериментальных данных от теоретической кривой:
 ,
,
где Р>1>(t>i>)-экспериментальное значение давления в момент времени t>i>, Р>2>(t>i>)-расчетное значение давления в момент времени t>i>, n – число расчетных точек.
|
теор |
экспер. |
Ti |
|
80,00 |
80,20 |
125 |
|
81,00 |
80,90 |
185 |
|
81,62 |
81,00 |
225 |
|
82,47 |
82,00 |
285 |
|
82,98 |
82,15 |
325 |
|
83,58 |
82,40 |
375 |
|
84,80 |
84,00 |
500 |
|
88,11 |
88,00 |
1000 |
|
89,80 |
90,00 |
3000 |
 =
0,41
=
0,41
Исходя из этого, в дальнейших расчетах будем использовать эквивалентный объект, описываемый с точностью 41% дифференциальным уравнением 1-го порядка с самовыравниванием и запаздыванием со следующей передаточной функцией:
Найдем величину коэффициента усиления объекта:
 ,
К>о>=0,5
,
К>о>=0,5
Передаточная функция объекта имеет вид:
4. Выбор типового регулятора АСР и определение параметров его настройки
В любой АСР управляющее воздействие на объект регулирования формируется автоматическим регулятором в соответствии с принятым алгоритмом регулирования и требуемым качествам АСР.
Необходимым условием надежной устойчивой работы АСР является правильный выбор типа регулятора и его настроек, гарантирующий требуемое качество регулирования.
Существует множество методик выбора регулятора. Воспользуемся методикой, основанной на анализе вида передаточной функции объекта регулирования.
В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов.
Основные области применения линейных регуляторов определяются с учетом следующих рекомендаций:
И – регулятор со статическим ОР – при медленных изменениях возмущений и малом времени запаздывания (τ>о>/Т>о><0.1);
П – регулятор со статическим и астатическим ОР – при любой инерционности и времени запаздывания, определяемом соотношением τ>о>/Т>о><0.1;
ПИ – регулятор – при любой инерционности и времени запаздывания ОР, определяемом соотношением τ>о>/Т>о><1;
ПИД – регуляторы при условии τ>о>/Т>о><1 и малой колебательности исходных процессов.
В нашем случае (АСР влажности) подходящим является ПИ-регулятор, т.к. по условиям задачи на объект действуют возмущения, вызывающие отклонения уровня, соответствующие 5 % при перестановке регулирующего органа и по виду переходного процесса и передаточной функции. Если при дальнейших расчетах окажется, что ПИ-регулятор не удовлетворяет заданным условиям, нам необходимо выбрать более сложный (и следовательно, более дорогой) ПИД - регулятор, который имеет лучшие показатели регулирования.
5. Анализ динамических характеристик АСР с типовым регулятором
Принято для расчета переходных процессов АСР технологических объектов (химических, металлургических, а также предприятий стройиндустрии) применять метод расчета переходных процессов по возмущению со стороны регулирующего органа. Задание регулятору определяется как правило по показателям качества конечного продукта (или полупродукта), поэтому задание регулятора не меняют, а процесс регулируют посредством воздействия на регулирующий орган, через который, как правило, идут основные возмущения. Определяем переходный процесс АСР по возмущающему воздействию на регулирующий орган. В этом случае передаточная функция замкнутой системы определяется по формуле
W>з >(p) = W>об >(p) / (1 + W>об >(p) * W>рег >(p))
Регулирующий орган и объект регулирования представлены передаточной функцией (5.2).
W>об >(p) = К>о >* е – τ*р / (Т>о >p + 1)
В программном продукте Simulink передаточная функция Wоб(р) представлена последовательно соединенными звеньями: апериодическим и звеном запаздывания (рис.6).
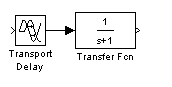
Рис. 6. Структура объекта регулирования в программном продукте Simulink.
ПИ-регулятор представлен двумя, суммирующимися в итоге, звеньями: пропорциональным Wп(р)=Kp и интегрирующим W>и >= 1 / Т>и * >p . Передаточная функция регулятора, таким образом, определяется по формуле (5.3):
W>рег >(p) = W>п >+ W>и >= К>р >+ 1 / Т>и * >p
где Wп – усилитель
Wи – интегратор
В программном продукте Simulink структура регулятора будет выглядеть следующим образом
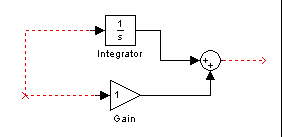
Рис.5. Структура ПИ-регулятора в программном продукте Simulink.
Структурная схема АСР, соответствующая ее функциональной схеме с обобщенным объектом регулирования и обозначенным регулятором представлена на рисунке 5
Рис. 6 Структурная схема АСР.
Данная схема детализируется для расчета замкнутой АСР и приводится к виду
Рис. 7. Структурная схема замкнутой автоматической системы управления, состоящей из объекта и регулятора
В
качестве выходной величины системы
рассматривают чаще управляемую величину
х (отражающую для технологических
объектов параметр качества конечной
продукции или полуфабриката), либо
отклонение управляемой величины от
заданного значения
 (ошибка управления).
(ошибка управления).
В качестве входной (возмущающей) величины замкнутой системы управления рассматривают:
а) возмущения со стороны регулирующего органа – по каналу управления у>в> (перемещение выходного сигнала исполнительного механизма, равное перемещению регулирующего органа);
б) внешнее возмущения Z;
в) возмущение по заданию х>0>, связанная с изменением заданного значения управляемой величины.
Передаточные функции замкнутой системы при равенстве нолю других входных воздействий имеют следующий вид:
а) по каналу управления (возмущение со стороны регулирующего органа) Х>вх.с.>=У>в>:
 ,
,
б) при внешнем возмущении Х>вх.с.>=Z:
 ,
,
в) при возмущении по заданию Х>вх.с.>=Х>0, >если выходная величина – управляемая величина:
> >>.>
>>.>
Учитывая, что для большинства технологических процессов стройиндустрии характерны возмущения со стороны регулирующего органа, будем придерживаться формулы
По условию задачи обобщенный объект регулирования, представляющий последовательное соединение апериодического звена первого порядка и звена запаздывания, выражается следующей передаточной функцией:
> >>,>
>>,>
где k>0 >– коэффициент передачи объекта;
T>0 >- постоянная времени объекта;
 -
запаздывание объекта.
-
запаздывание объекта.
Передаточная функция ПИ-регулятора представлена параллельным соединением пропорциональной (K>p>=75) и интегральной (1/(T>и>p)) составляющих, где T>и>= 0,1 :
 .
.
С помощью специальных символов программного продукта Simulink создаем схему расчета переходного процесса по возмущению со стороны регулирующего органа
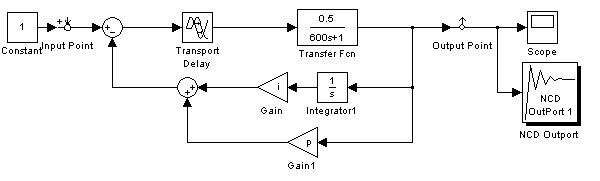
Рис. 8 Структурно-математическая схема расчета переходного процесса по возмущению со стороны регулирующего органа в программном продукте Simulink.
6. Построение переходного процесса АСР с использованием ПИ-регулятора
6.1 Построение переходного процесса при помощи пакета Simulink
В результате моделирования в пакете Simulink с помощью выполненной схемы (рис. 8.) мы получили переходную и амплитудо-фазовочастотную характеристики по возмущению со стороны регулирующего органа.
Рассмотрим переходную характеристику:
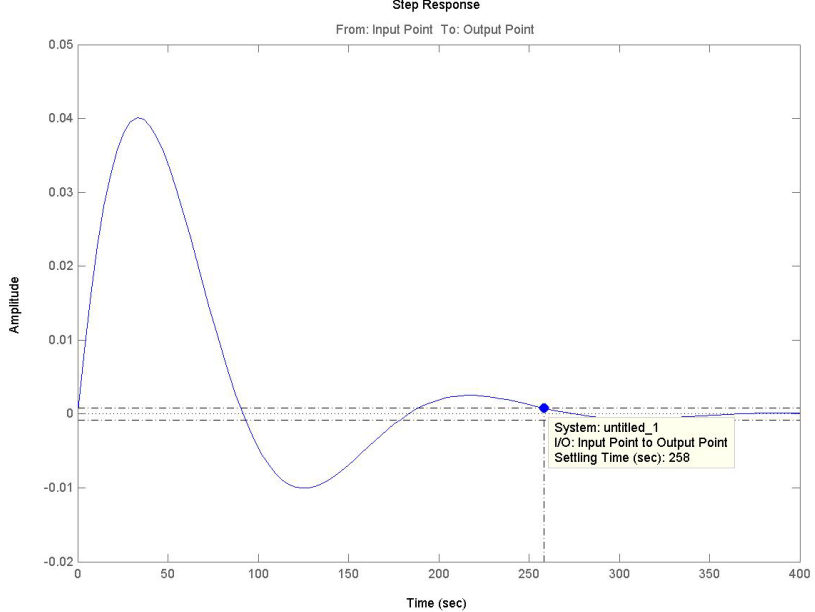
Рис. 9 Переходная характеристика САР с ПИ – регулятором
Время регулирования составляет 258 с.
Установившееся значение – 1.0
Время нарастания – 54 с
Статическая ошибка – 0
Перерегулирование - 2 %
Чтобы получить логарифмические амплитудные и фазовые характеристики, по которым можно определить запасы устойчивости по амплитуде и фазе необходимо разомкнуть систему
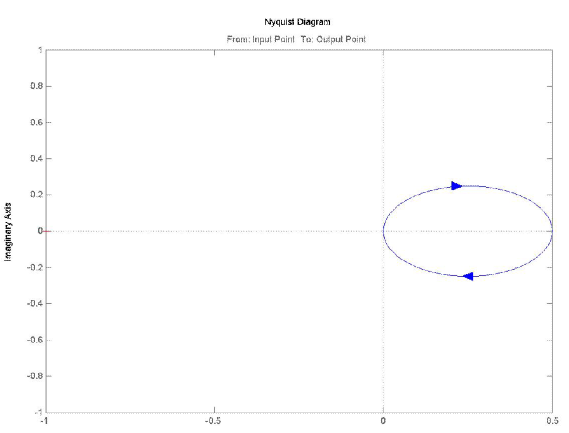
Рис.10. Годограф системы автоматического регулирования температуры
Из рис.10 видно, что система является устойчивой, т.к. годограф не охватывает точку с координатой (-1j, 0) (критерий Найквеста).
По полученным показателям качества переходного процесса и запасам устойчивости можно сделать вывод о соответствии этих параметров заданным. Что в свою очередь должно обеспечивать стабильную работу системы.
6.2 Расчет одноконтурной цифровой АСР

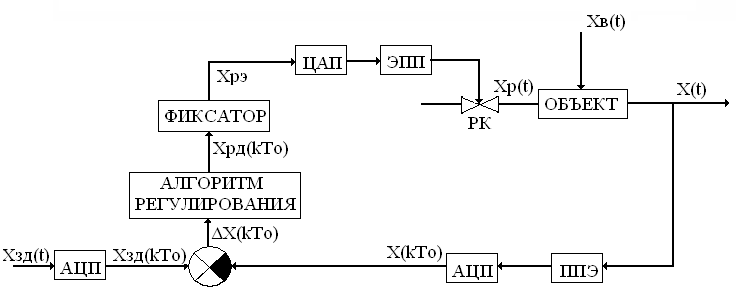
Рис.11 Структурная схема одноконтурной цифровой САР
Рассчитаем параметры дискретного регулятора по имеющимся значениям непрерывного регулятора:
Кр=4,5
Ти=142,8
Такт квантования
–

То=60
Уравнение, описывающее динамику дискретного ПИ-регулятора:

Где k – дискретный аргумент.
По методу трапеций:
 ,
q>o>
=
,
q>o>
=
 = 5.44
= 5.44
 ,
q>1>
=
,
q>1>
=
 = -3.55
= -3.55
Разностное уравнение, описывающее дискретный ПИ-регулятор:

7. Выбор технических средств автоматизации
7.1 Датчики
7.1.1 Пружинный манометр
Для измерения давления топлива перед горелкой используются пружинные манометры со встроенным преобразователем для дистанционной передачи показаний. Тоже самое используется для измерения давления пара и воздуха в воздухопроводе.
Трубчатые пружины представляют собой кругообразно согнутые трубки с овальным поперечным сечением. Давление измеряемой среды воздействует на внутреннюю сторону этой трубки, в результате чего овальное поперечное сечение принимает почти круглую форму. В результате искривления пружинной трубки возникают напряжения в кольцах трубки, которые разгибают пружину. Незажатый конец пружины выполняет движение, пропорциональное величине давления. Движение передаётся посредством стрелочного механизма на шкалу. Для измерений давления до 40 или 60 бар применяются, как правило, согнутые с углом витка около 2700, кругообразные пружины. Для измерений давления с более высокими значениями используются пружины с несколькими лежащими друг над другом витками и одинаковым витковым диаметром (винтовая пружина) или со спиралеобразными витками, лежащими в одной плоскости (плоская спиральная пружина). Трубчатые пружины обладают сравнительно низким перестановочным усилием. Поэтому их защита от перегрузки может проводиться только с ограничениями. Показания лежат в диапазоне от 0 ...0,6 до 0 ... 7000 бар при точности показаний (классе) от 0,1 до 4,0%.
7.1.2 Электроконтактный манометр
Для измерения давления в газопроводе в режиме проверки герметичности клапанов достаточно электроконтактного манометра.
Электроконтактные (сигнализирующие) манометры традиционно базируются на механических контактах. В некоторых вариантах исполнения таких приборов с целью повышения механической прочности контакта устанавливаются магнитные элементы. Разные производители используют различные варианты корпусов и компановок, но принцип работы таких устройств сохраняется. На рис.1а показан электроконтактный манометр, выпускаемый нашей компанией, и состоящий из двух частей: измерительной части манометра и электроконтактной приставки. Электроконтактный манометр с традиционными электрическими контактами обеспечивает работу цепи с разрывной электрической мощностью при токе 0,7…1 А около 10 ВА(Вт), с магнитным поджатием, при тех же значениях тока, – 30 ВА(Вт).

Электроконтактные манометры: а – манометр с электроконтактной приставкой; б и в – электроконтактные манометры ЭКМ160 и ЭКМ100 на основе микровыключателей; г – передаточный механизм с микровыключателями.
7.1.3 Уровнемер
Для измерения уровня воды в верхнем барабане используем промышленный уровнемер с дифференциальным манометром
Дифференциальные манометры (дифманометры) сильфонные предназначены для измерения: расхода жидких и газообразных сред по методу переменного перепада давлений; разности давлений жидких и газообразных сред (перепадомеры); уровня жидких сред, находящихся под атмосферным, вакуумметрическим или избыточным давлением (уровнемеры).
7.2 Контроллер
В качестве контроллера я решил выбрать промышленный контроллер «БУК-А1», описание которого приведено ниже.
Блок предназначен для автоматического управления котлом серии КВ-ГМ производительностью до 30Гкал/ч., работающим на газе или мазуте с паромеханическими или ротационными форсунками. Блок применяется совместно с блоком регулирования БР10 или другими регуляторами, имеющими входы задания режимов работы и управления регулирующими органами регуляторов.
Условия эксплуатации:
- температура окружающего воздуха от 5 до 500 С;
- относительная влажность воздуха до 80% при 350С;
- вибрация с частотой от 5 до 25 Гц с амплитудой до 0,1 мм;
- внешние постоянные или переменные (50 Гц) магнитные поля напряженностью до 400 А/м;
- атмосферное давление от 84 до 106,7 кПа (от 630 до 800 мм рт.ст.);
- высота над уровнем моря до 1000 м;
- помещение закрытое отапливаемое без непосредственного воздействия солнечных лучей, осадков, ветра, песка, пыли, не взрывоопасное и не содержащее в воздухе примесей агрессивных веществ.
Блок обеспечивает выполнение следующих функций:
а) автоматические пуск и останов котла;
б) аварийная защита, обеспечивающая автоматический останов котла при возникновении аварийных ситуаций, перечисленных в таблице 1, с блокировкой пуска котла и запоминанием первопричины срабатывания аварийной защиты;
Таблица 1
|
Параметр, ситуация, при которых осуществляется аварийная защита и сигнализация |
Надпись у светового индикатора блока в поле с красным контуром |
|
1 Возникла неисправность в цепях защиты |
ЗАЩИТА НЕИСПРАВНА |
|
2 Общекотельный параметр не в норме |
АВАРИЯ В КОТЕЛЬНОЙ |
|
3 Давление в топке котла высокое (взрыв) |
ДАВЛЕНИЕ В ТОПКЕ ВЫСОКОЕ |
|
4 Давление воды на выходе котла не в норме |
ДАВЛЕНИЕ ВОДЫ НЕ В НОРМЕ |
|
5 Температура воды на выходе котла высокая |
ТЕМПЕРАТУРА ВОДЫ ВЫСОКАЯ |
|
6 Расход воды через котел низкий |
РАСХОД ВОДЫ НИЗКИЙ |
|
7 Разрежение в топке котла низкое |
РАЗРЕЖЕНИЕ НИЗКОЕ |
|
8 Аварийно отключился дымосос и/или вентилятор вторичного воздуха |
ВЕНТИЛЯТОР ОТКЛЮЧИЛСЯ |
|
9 Давление вторичного воздуха перед горелкой низкое |
ДАВЛЕНИЕ ВОЗДУХА НИЗКОЕ |
|
10 Давление газа перед горелкой высокое (при работе котла на газе) |
ДАВЛЕНИЕ ГАЗА ВЫСОКОЕ |
|
11 Давление первичного воздуха перед горелкой низкое |
ДАВЛЕНИЕ ПЕРВИЧНОГО ВОЗДУХА НИЗКОЕ |
|
12 Ток электродвигателя форсунки не в норме |
ФОРСУНКА НЕИСПРАВНА |
|
13 Давление газа перед горелкой или давление мазута после регулирующего органа мазута низкое |
ДАВЛЕНИЕ ТОПЛИВА НИЗКОЕ |
|
14 Пламя запальника или горелки отсутствует |
НЕТ ПЛАМЕНИ ГОРЕЛКИ |
|
15 Негерметичен любой отсекатель (при работе котла на газе) газа или загазована топка котла |
ПРОПУСК ГАЗА |
|
16 Трубопроводная арматура котла не подготовлена к пуску |
ПУСК НЕ ПОДГОТОВЛЕН |
|
17 Напряжение питания блока аварийно отключилось |
См. примечание |
|
Примечание - При возникновении ситуации 17 световая сигнализация отсутствует, и запоминание причины аварийной ситуации не производится |
Блок выполнен в навесном металлическом кожухе, рассчитанном для монтажа на вертикальной плоскости. Кожух выполнен в виде передней и задней панелей. Передняя панель представляет собой лицевую крышку с отверстиями под органы управления и сигнализации и нанесенными обозначениями этих органов. На задней панели непосредственно размещены трансформаторы питания. К задней панели через стойки последовательно крепятся платы ПВР-А1, ПУ-А1, ПЗС-А1. Сетевое питание поступает на трансформаторы через выключатель, установленный на плате ПЗС-А1 и предохранитель, установленный на задней панели. Выходные напряжения трансформаторов поступают на плату ПВР-А1 через гнездо РП15-9Г, установленное на задней панели, и вилку РП15-9Ш, соединенную жгутом с платой ПВР-А1. Плата ПУ-А1 соединена через жгуты, разъемные соединители ГРПМ-1-45 с платами ПЗС-А1 и ПВР-А1. Плата ПВР-А1 соединена с тремя, а плата ПЗС-А1 - с одним выходными разъемами РП10, расположенными на задней панели снизу. При установке передней панели на место органы управления и сигнализации, распаянные на плате ПЗС-А1, попадают в соответствующие отверстия на передней панели. На задней панели имеется закрываемое окно, обеспечивающее возможность настройки временных интервалов путем распайки диодных перемычек на плате ПУ-А1, а также возможность реализации шагового режима работы блока путем подключения к стойкам Х19:1 и Х19:2 внешнего тумблера при проведении лабораторной проверки или пуско-наладочных работ с котлом.
Для охлаждения элементов в верхней и нижней частях кожуха имеются вентиляционные отверстия.
На задней панели кожуха имеются лапки для крепления блока на вертикальной плоскости.
В приложении приведена функциональная схема автоматизации котла серии КВ-ГМ с применением блока.
Наименования, назначения и рекомендуемые типы (условные обозначения) исполнительных устройств, датчиков и приборов, изображенных на функциональной схеме, приведены в перечне элементов к этой схеме.
В рекомендуемой схеме совместно с блоком применен блок регулирования БР10, обеспечивающий ПИ-регулирование основных параметров котла. Компоненты системы объединены в щите автоматики, куда кроме перечисленных изделий входят регистрирующие приборы, пускатели бесконтактные ПБР-2М для управления электрическими исполнительными механизмами.
8. Заключение
В результате проделанной работы выяснилось, что автоматизация пара в котельной не стоит на месте, а постоянно придумываются и разрабатываются новые приборы, агрегаты, технологии. В частности так же появляются новые датчики и приборы, которые ненамного превосходят по цене своих предшественников, но во многом превосходят их по качествам, все эти достижения позволяют с наименьшими затратами и усилиями производить качественный продукт в короткие сроки.
В процессе выполнения курсовой работы была определена передаточная функция объекта по виду экспериментальной и эквивалентной кривых, подобран ПИ- регулятор, и проведены исследования этого регулятора в среде моделирования MatLab и в частности в пакете Simulink, при этом установлено, что смоделированная система удовлетворяет заданным требованиям к устойчивости и заданным показателям качества.
9. Библиографический список
1. Абдулин С.Ф. «Технические средства автоматизации». Методические указания по выполнению курсовых работ и учебно-методические материалы к самостоятельной работе и индивидуальным заданиям. Омск: Изд-во СибАДИ, 2005.-84 с.
2. Абдулин С.Ф. Технические измерения и приборы в строительстве: Учебное пособие. – Омск: Изд-во СибАДИ, 2006.-573 с.
3. Руппель А. А. Курс лекций по АТПП., 2005 г.
4. URL http://www.wika.ru/
5. URL http://jumas.ru/
6. URL http://zhurnal.ape.relarn.ru/
7. URL http://www.tenco.ru/