Ответы на экзаменационные вопросы по теоретической механике
Ответы на экзаменационные вопросы по теоретической механике
1.1)Предмет динамики. Основные понятия и определения: масса, мат.точка, сила.
2) Дифф.ур-я движения мат.точки в поле центральной силы. Формула Бине.
1) Массу Ньютон определяет как количество материи, а кельвин как количество энергии.
Мат.точкой называется материальное тело размерами которого при изучении данного движения можно пренебречь.
Мат.точка имеет массу.
Сила – векторная величена определяющая меру взаимодействия между двумя телами.
2)
Д
ифференциальное
уравнение траектории точки в форме
Бине.
2.1) З-ны механики Галелея-Ньютона. Инерциальная система отсчета. Задачи динамики.
2) Движение мат.точки в поле тяготения Земли.
1)
I-й з-н (З-н Инерции): Мат.точка сохраняет состояние покоя или равномерного прямолинейного движения до тех пор пока действие других тел не изменит этого состояния.
II-й з-н (Основной з-н движения): Модуль ускорения мат.точки пропорционален модулю приложенной к ней силы, а направление ускорения совпадает с направлением действия на неё силы.
III-й з-н (З-н дейтвия и противодействия): Две мат.точки действуют друг на друга с силами равными по модулю и направленные вдоль прямой соеденяющей эти точки – в противоположные стороны.
Согласно з-ну всемирного тяготения сила тяготения пропорциональна силе тяжести, т.е. массе тяготеещей.
Галелей установил, если свободное падение тел происходит в пустоте и не далеко от поверхности Земли, то оно совершается с одним и тем же ускорением g-9,81 м/с^2 => из второго закона Ньютона.
P
=mg,
где P
– вес тела
M – масса Земли; R – радиус Земли; h<<R
З
адачи
динамики:
Первая задача динамики состоит в том, что зная закон движения и массу мат.точки необходимо найти силы действующие на свободную точку или реакции связей, если точка не свободна; в последнем случае активно действующие силы должны быть заданы.
Вторая задача динамики: Зная действующие на мат.точку силы, её массу, начальное положение и скорость определить закон движения мат.точки.
2)Если на мат точку M действует центральная сила P , то момент количества движения этой точки Lo относительно центра силы O постоянен и точка движется в плоскости I, перпендекулярной Lo. В этом случае Lo=const
3.1) Дифференциальные ур-я движения свободной и несвободной точки в декартовых координатах и в проекциях на оси естественного трёхгранника.
2) Сохранение момента количества движения мат.точки в случае центральной силы. Секторная скорость. Закон площадей.
1) Для свободной материальной точки.
В
проекциях на оси координат: На оси
естественного трёхгранника:
2) Моментом количества движения материальной точки отоносительно центра называется вектор,модуль которого равен произведению модуля количества движения на кратчайшее расстояние от центра до линии действия вектора количества движения, перпендекулярного плоскости, в которой лежат линии и направленный так, чтобы глядя от его конца видеть движение, совершающееся против часовой стрелки.
ТЕОРЕМА: Производная по времени от момента количества даижения материальной точки относительно некоторого центра равна геометрической сумме моментов всех сил, действующих на точку.
4.1)Две основные задачи динамики для мат.точки. Решение первой задачи динамики. Пример.
2)Теорема об изменении кинетического момента механической системы по отнашению к неподвижному центру и в её движении по отнашению к центру масс.
Первая задача динамики состоит в том, что, зная закон движения и массу материальной точки необходимо найти силы действующие на свободную точку или реакции связи, если точка несвободна. В последнем случае активно действующие силы должны быть заданы.
Вторая задача динамики: зная действующие на материальную точку силы, её массу, начальное положение и скорость определить закон движения материальной точки.
Решение первой задачи.
П

усть
задан закон движения материальной точки
в виде,
А так же её равнодействующая и масса m.
Из дифференциального уравнения движения материальной точки в
д

екартовой
системе координат следует, что:
А

налогично
решается первая задача для свободной
точки, когда связи отсутствуют, а по
известным уравнениям движения необходимо
найти действующие на точку силы. В этом
случае:
Пример.

Груз
весом Р поднимается вертикально вверх
по закону
Определить натяжение тросса.



Дано:
Решение.


2
)ТЕОРЕМА:
Производная по времени от кинетического
момента механической системы относительно
неподвижного центра равен главному
моменту всех внешних сил, действующих
на систему относительно того же центра.
5.1)Решение I-й задачи динамики. Пример.
2)Теорема об изменении количества движения точки и система в дифф.и конечной формах.
1)Решение первой задачи.
П
усть
задан закон движения материальной точки
в виде,
А так же её равнодействующая и масса m.
Из дифференциального уравнения движения материальной точки в
д
екартовой
системе координат следует, что:
А
налогично
решается первая задача для свободной
точки, когда связи отсутствуют, а по
известным уравнениям движения необходимо
найти действующие на точку силы. В этом
случае:


Пример.
Груз
весом Р поднимается вертикально вверх
по закону
Определить натяжение тросса.
Дано:
Решение.
2
)ТЕОРЕМА:
Производная по времени от кинетического
момента механической системы относительно
неподвижного центра равен главному
моменту всех внешних сил, действующих
на систему относительно того же центра.
2)З-н сохранения количества движения:
Если геометрическая сумма всех внешних сил, приложенных к механической системе = 0, то её вектор количества движения постоянен. Воспользуемся дифф.формой теоремы об изменении количества движения механической системы.
.б) Если алгебраическая сумма проекций на какую либо ось всех действующих сил системы = 0, то проекция её вектора количества движения на эту ось есть величена постоянная.
6.1)Решение II-й задачи динамики. Постоянные интегрирования и их определения по начальным условиям. Пример.
2)Кинетический момент механической системы относительно центра и оси. Кинетический момент твёрдого тела вращающегося относительно оси.
1
)Для
решения этой задачи целесообразно
воспользоваться дифф.ур-ми мат.точки в
виде:
П
оскольку
действие силы известны, то => известны
и правые части этих ур-й. Интегрирование
их дважды по времени приводит их к 3-м
ур-м содержащим 6 произвольным постонным:
З
наче
ния этих постоянных могут быть просто
найдены с помощью нач.усл., т.е. если
известно:
П
одставив
найденные значения в постоянные
интегрирования в общее решение дифф-х
ур-й получили закон движения точки:
Отсюда => , что мат.точка под действием одной и той же силы может совершать целый класс движений определённый начальными условиями.
Н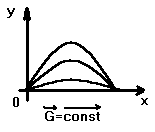

апример:
движения свободной мат.точки под силами
тяжести – семейств кривых 2-го порядка.
Начальные условия позволяют учесть влияние на движение мат.точки сил дейсвовавших на неё до того момента, который принят за начальный.
2)Закон сохранения кинетического момента механической системы:
1)Если сумма моментов относительно данного центра всех внешних сил = 0, то кинетический момент механической системы сохраняет модуль и направление в пространстве
2)Если сумма моментов всех действующих на систему внешних сил относительно некоторой оси = 0, то кинетический момент механической системы относительно этой оси есть величина постоянная.
Частные случаи:
С
истема
вращается вокруг неподвижной оси в этом
случае кинетический момент механической
системы =
,и если сумма моментов относительно этой оси равна нулю, то
7.1)Свободные колебания мат.точки. Частота и период колебаний. Амплитуда и начальная фаза.
2)Потенциальное силовое поле и силовая функция. Выражение проекций силы потенциального поля с помощью силовой функции.
1

)

8.1)Затухающие колебания мат.точки. Случай апериодического движения.
2)Момент инерции твёрдого тела относительно оси любого направления. Центробежные моменты инерции.

1)

2)
9.1)Вынужденные колебания мат.точки. Резонанс.
2)Количество движения мат.точки и механической системы. Выражение количества движения механической системы через массу системы и скорость центра масс.
1)Движение мат.точки называется вынужденным если на ряду с востанавливающей силой на неё действует возмущающая сила.


С
целью упрощения будем считать, что
возмущающая сила изменяется по
гармоническому закону.
Явление сильного возрастания амплитуды при совпадении частоты возмущающей силы с частотой собственных колебаний называется резонансом.
2) Количеством движения мат точки называется вектор, имеющий направление вектора скорости, и модуль, равный произведению массы точки m на модуль скорости её движения v.
Количеством движения механической системы называется вектор, равный геометрической сумме (главному вектору) количеств движения всех мат точек этой системы.
10.1)Дифф.ур-я поступательного движения судна при сопротивлении, пропорциональном скорости.
2)Момент количества движения мат.точки относительно центра и оси.
1
)При
движении тел в жидкости, сила трения
пропорциональна первой степени скорости.
2)Моментом количества движения мат.точки относительно центра называется вектор, модуль которого = произведению модуля количества движения на кратчайшее расстояние от центра до линии действия вектора количества движения, I-й плоскости в которой лежат упоминающиеся линии и направленный так, что бы глядя от его конца видеть движение, совершающееся против часовой стрелки.

Моментом
количества движения мат.точки относительно
оси называется скалярная величена =
произведению проекции количества
движения мат.точки на плоскость
перпендикулярную данной оси и на
кратчайшее расстояние от точки пересечения
данной оси с этой плоскостью до прямой,
на которой лежит прямая вектора количества
движения.
11.1)Дифф.ур-я относительного движения мат.точки. Переносная и Кориолисова силы инерции.
2)З-н сохранения кинетического момента механической системы. Примеры.
1
)Введем
2 вектора
ч
исленно
равные произведениям
и
направленные противоположно ускорениям
Эти векторы назовём переносной и кориолисовой силами инерции.
Д
ифф.ур-я
относительного движения мат.точки.
2)а)Если сумма моментов относительно данного центра всех внешних сил = 0, то кинетический момент механической системы сохраняет модуль и направление в пространстве.
.б)Если сумма моментов всех действующих на систему сил относительно некоторой оси = 0, то кинетический момент механической системы относительно этой оси есть величина постоянная.
Частный случай:
С
истема
вращается вокруг неподвижной оси. В
этом случае:
И
если сумма моментов относительно этой
оси = 0, то:
Пример:
П
латформа
Жуковского
Изменяя положение рук можно изменить угловую скорость вращения системы.
12.1)принцип относительности классической механики. Случаи относительного покоя.
2)Работа силы на конечном перемещении точки в потенциальном поле. Потенциальная энергия. Примеры потенциальных силовых полей.
1)Никакие механические явления , происходящие в среде, не могут обнаружить её прямолинейного и равномерного поступательного движения.
В том случае, когда мат точка находится в состоянии относительного покоя, геометрическая сумма приложенных к точке сил и переносной силы инерции равна 0.
2)ТЕОРЕМА. Работа постоянной силы по модулю и направлению силы на результирующем перемещении = алгебраической сумме работ этой силы на составляющих перемещениях.
Работа сил, действующих на точки механической системы в потенциальном поле, равна разности значений силовой функции в конечном и начальном положениях системы и не зависит от формы траектории точек этой системы.
Потенциальная энергия системы в любом данном её положении = сумме работ сил потенциального поля, приложенных к её точкам на перемещении системы из данного положения в нулевое.
Примером потенциального силового поля является гравитационное поле Земли.
13.1)Механическая система. Масса системы, Центр масс и его координаты.
2)Мощность. Работа и мощность сил, приложенных к твёрдому телу, вращающемуся вокруг неподвижной оси.
1)Механической
системой или системой материальных
точек называется такая их совокупность,
при которой изменение положения одной
из точек вызывает изменение положения
всех остальных. Примером механической
системы может служить любая машина или
механизм, где движение от одних частей
машины или механизма передаётся с
помощью связей другим частям. Твёрдое
тело будем рассматривать как механическую
систему, расстояния между точками
которой неизменны. Системы, отвечающие
этому условию называются неизменными.
Системой свободных точек называется
система материальных точек, движение
которой не ограничивается никакими
связями, а определяется только действующими
на них силами. Пример- солнечная система.
Системой несвободных точек называется
система материальных точек, движения
которых не ограничены связями. Пример-
система блоков (полиспаст). Масса системы
это сумма масс всех точек, входящих в
систему. Центром масс механической
системы называется точка радиус-вектор
которой отвечает условию
 ,
где
,
где
 -
радиусы-векторы материальных точек
-
радиусы-векторы материальных точек
 .
Спроектировав обе части этого равенства
на оси OX,
OY,
OZ
прямоугольной системы координат, получим
выражение, определяющее координаты
центра масс механической системы
.
Спроектировав обе части этого равенства
на оси OX,
OY,
OZ
прямоугольной системы координат, получим
выражение, определяющее координаты
центра масс механической системы

 ,
где
,
где
 -
координаты точек.
-
координаты точек.
2)Предположим,
что к твёрдому телу, вращающемуся вокруг
неподвижной оси Z,
приложены внешние силы
 . Вычислим сначала элементарную работу
отдельной силы
. Вычислим сначала элементарную работу
отдельной силы
 ,
которая приложена в точке
,
которая приложена в точке
 ,
описывающей окружность радиусом
,
описывающей окружность радиусом
 .
Разложим эту силу на три составляющие,
направленные по естественным осям
траектории точки
.
Разложим эту силу на три составляющие,
направленные по естественным осям
траектории точки
 . Определим момент силы
относительно оси z
как сумму моментов её составляющих
относительно этой оси. В общем момент
силы
относительно оси Z
равен моменту силы
. Определим момент силы
относительно оси z
как сумму моментов её составляющих
относительно этой оси. В общем момент
силы
относительно оси Z
равен моменту силы
 ,
которая лежит в плоскости, перпендикулярной
оси Z
,
которая лежит в плоскости, перпендикулярной
оси Z
 . При элементарном перемещении тела его
угол поворота φ получает приращение
dφ,
а дуговая координата точки
-
приращение
. При элементарном перемещении тела его
угол поворота φ получает приращение
dφ,
а дуговая координата точки
-
приращение
 .
Вычислим работу силы
на этом перемещении как сумму работ
трёх её составляющих. Работа сил
.
Вычислим работу силы
на этом перемещении как сумму работ
трёх её составляющих. Работа сил
 перпендикулярных вектору скорости
точки
,
равна 0, поэтому элементарная работа
силы
перпендикулярных вектору скорости
точки
,
равна 0, поэтому элементарная работа
силы
 .
Элементарная работа всех сил, приложенных
к твёрдому телу
.
Элементарная работа всех сил, приложенных
к твёрдому телу
 ,
где
,
где
 - Главный момент внешних сил относительно
оси вращения z.
Таким образом
- Главный момент внешних сил относительно
оси вращения z.
Таким образом
 , т.е. элементарная работа сил, приложенных
к твёрдому телу, вращающемуся вокруг
неподвижной оси, равна произведению
главного момента внешних сил относительно
оси вращения на приращение угла поворота.
Мощность вычисляется по следующей
формуле:
, т.е. элементарная работа сил, приложенных
к твёрдому телу, вращающемуся вокруг
неподвижной оси, равна произведению
главного момента внешних сил относительно
оси вращения на приращение угла поворота.
Мощность вычисляется по следующей
формуле:
14.1)Классификация сил, действующих на механическую систему: силы внешние и внутренние, активные и реакции связей.
2)Физический маятник. Опытное определение моментов инерции тел.
1)Внешние силы- силы, действующие на материальную точку системы со стороны тел не входящих в состав данной механической системы.
Внутренние силы- силы, действующие между материальными точками данной механической системы.
Силы заданные по условию задачи принято называть- активными силами. А силы, обусловленные наличием связи- реакциями связи.
2) Физический
маятник- твёрдое тело, совершающее
колебания вокруг горизонтальной
неподвижной оси под действием только
силы тяжести. Ось вращения физического
маятника называется- осью привеса.
Обозначим φ угол между вертикальной
осью, проходящей через ось привеса
линией, проходящей перпендикулярно оси
привеса через центр тяжести точку С. G-
вес тела. Дифференциальное уравнение
физического маятника
 знак «-» в правой части поставлен потому,
что при повороте маятника в положительном
направлении (т.е. против часовой стрелки)
сила тяжести хочет повернуть маятник
в обратном направлении.
знак «-» в правой части поставлен потому,
что при повороте маятника в положительном
направлении (т.е. против часовой стрелки)
сила тяжести хочет повернуть маятник
в обратном направлении.
 - это уравнение называется дифференциальным
уравнением колебаний физического
маятника.
- это уравнение называется дифференциальным
уравнением колебаний физического
маятника.
15.1)Моменты инерции системы и твёрдого тела относительно оси, полюса и плоскости. Радиус инерции.
2)Законы Кеплера. Закон всемирного тяготения.
1)Моментом инерции твердого тела относительно оси называется скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до оси.
Моментом инерции твёрдого тела относительно плоскости называется скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояний от этой точки до плоскости.
Моментом
инерции твёрдого тела относительно
полюса (полярным моментом инерции)
называется скалярная величина, равная
сумме произведений массы каждой точки
тела на квадрат расстояния от точки до
этого полюса. Радиусом инерции тела
относительно данной оси z
называется линейная величина
 ,
определяемая равенством
,
определяемая равенством
 ,
где М- масса системы.
,
где М- масса системы.
2)Законы Кеплера: 1. Все планеты солнечной системы движутся по эллипсу, в одном из фокусов находится Солнце. 2. Секторные скорости радиусов векторов планет, относительно Солнца не зависят от времени. 3. Квадраты периодов обращения планет относятся как кубы больших полуосей.
Закон всемирного
тяготения

16. 1)Осевые моменты инерции однородного стержня, цилиндра, шара.
2)Теорема об изменении момента количества движения точки.
1)Момент
инерции однородного тонкого стержня
 Момент инерции однородного круглого
цилиндра
Момент инерции однородного круглого
цилиндра
 Полого
цилиндра
Полого
цилиндра
 Момент
однородного шара
Момент
однородного шара

 -
это соотношение выражает теорему об
изменении момента количества 2)движения
материальной точки относительно центра:
производная по времени от момента
количества движения материальной точки
относительно некоторого неподвижного
центра равна геометрической сумме
моментов сил, действующих на точку,
относительно того же центра.
-
это соотношение выражает теорему об
изменении момента количества 2)движения
материальной точки относительно центра:
производная по времени от момента
количества движения материальной точки
относительно некоторого неподвижного
центра равна геометрической сумме
моментов сил, действующих на точку,
относительно того же центра.
17.1)Теорема о моментах инерции относительно параллельных осей.
Момент инерции
твёрдого тела относительно некоторой
оси равен моменту инерции тела относительно
параллельной оси, проходящей через его
центр масс, сложенному с произведением
массы тела на квадрат расстояния между
осями. Допустим, что задана ось .
Для доказательства теоремы проведём 3
взаимно перпендикулярные оси, из которых
ось
.
Для доказательства теоремы проведём 3
взаимно перпендикулярные оси, из которых
ось
 параллельна заданной оси
,
а ось
параллельна заданной оси
,
а ось
 лежит в плоскости параллельных осей
и
.
Для вычисления моментов инерции тела
относительно осей
и
опустим из каждой точки
рассматриваемого тела перпендикуляры
лежит в плоскости параллельных осей
и
.
Для вычисления моментов инерции тела
относительно осей
и
опустим из каждой точки
рассматриваемого тела перпендикуляры
 и
и
 на оси
на оси
 и
и
 .
Выразим длины этих перпендикуляров
через координаты этих точек:
.
Выразим длины этих перпендикуляров
через координаты этих точек:
 ,
, (зависимость а). Определим моменты
инерции тела относительно осей
и
:
(зависимость а). Определим моменты
инерции тела относительно осей
и
:
 ,
,
 .
Применим зависимость а)
.
Применим зависимость а)
 (зависимость б),
(зависимость б),
 из этой формулы получим
из этой формулы получим
 т.к.
т.к.
 =0
, то
=0
, то
 .
Подставляя это значение в равенство
б), получаем зависимость, установленную
теоремой:
.
Подставляя это значение в равенство
б), получаем зависимость, установленную
теоремой:

1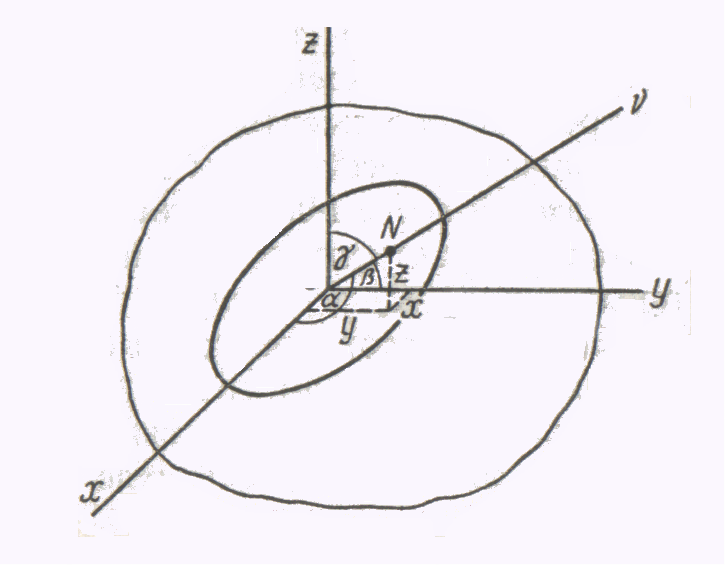 8.1)Центробежные
моменты инерции. Эллипсоид инерции.
Главные оси и главные моменты инерции.
8.1)Центробежные
моменты инерции. Эллипсоид инерции.
Главные оси и главные моменты инерции.
2) Дифференциальные уравнения поступательного движения и вращения тела вокруг неподвижной оси.
1)Момент инерции твёрдого тела относительно оси v определяется по формуле

Рассмотрим
изменение момента инерции
 ,
происходящее при изменении направления
оси v
т.е при изменении углов α, β, γ. Для
наглядного изображения этого изменения
отложим по оси v
от точки О отрезок ON,
длина которого
,
происходящее при изменении направления
оси v
т.е при изменении углов α, β, γ. Для
наглядного изображения этого изменения
отложим по оси v
от точки О отрезок ON,
длина которого
 Выразим направляющие косинусы оси v
через координаты x,
y,
z
точки N
и длину отрезка ON:
Выразим направляющие косинусы оси v
через координаты x,
y,
z
точки N
и длину отрезка ON:
 ;
;
 ;
;
 .
Подставим cosα, cosβ,
cosγ
в выражение
.
Подставим cosα, cosβ,
cosγ
в выражение
 , подставили разделили на
, подставили разделили на
 получили
получили
 .
Это уравнение определяет поверхность,
по которой перемещается точка N,
при изменении направления оси v
при условии(ф-ла
123). Это уравнение представляет собой
уравнение поверхности второго порядка.
Эта поверхность является эллипсоидом,
т.к. расстояния от всех точек N
до точки О, определяемые формулой 123
всегда конечны. Этот эллипсоид называется
эллипсоидом инерции. Центр эллипсоида
находится в начале координат. Три оси
эллипсоида называются главными осями
инерции тела в точке О, а моменты инерции
относительно этих осей- главными
моментами инерции. Величины
.
Это уравнение определяет поверхность,
по которой перемещается точка N,
при изменении направления оси v
при условии(ф-ла
123). Это уравнение представляет собой
уравнение поверхности второго порядка.
Эта поверхность является эллипсоидом,
т.к. расстояния от всех точек N
до точки О, определяемые формулой 123
всегда конечны. Этот эллипсоид называется
эллипсоидом инерции. Центр эллипсоида
находится в начале координат. Три оси
эллипсоида называются главными осями
инерции тела в точке О, а моменты инерции
относительно этих осей- главными
моментами инерции. Величины

 называются центробежными моментами
инерции соответственно относительно
осей y
и z,
z
и x,
x
и y.
называются центробежными моментами
инерции соответственно относительно
осей y
и z,
z
и x,
x
и y.
2)При
поступательном движении тела все его
точки движутся также как и и его центр
масс. Поэтому дифференциальные уравнения
движения центра масс тела являются
дифференциальными уравнениями
поступательного движения твёрдого
тела:
 с y
и z
такие же уравнения m-
масса тела,
с y
и z
такие же уравнения m-
масса тела,
 - координаты центра масс тела
- координаты центра масс тела
 - проекция внешней силы F
на оси координат X,Y,Z
– проекции главного вектора внешних
сил R
на эти оси. По дифференциальным уравнениям
поступательного движения можно решать
два основных типа задач на поступательное
движение твёрдого тела: 1) по заданному
движению твёрдого тела определить
главный вектор, приложенных к нему сил
2) по заданным внешним силам, действующим
на тело, и начальным условиям движения
находить кинематические уравнения
движения тела, если известно, что оно
движется поступательно.
- проекция внешней силы F
на оси координат X,Y,Z
– проекции главного вектора внешних
сил R
на эти оси. По дифференциальным уравнениям
поступательного движения можно решать
два основных типа задач на поступательное
движение твёрдого тела: 1) по заданному
движению твёрдого тела определить
главный вектор, приложенных к нему сил
2) по заданным внешним силам, действующим
на тело, и начальным условиям движения
находить кинематические уравнения
движения тела, если известно, что оно
движется поступательно.
Уравнение
 представляет собой дифференциальное
уравнение вращения твёрдого тела вокруг
неподвижной оси. По дифференциальному
уравнению можно решать следующие задачи:
1) по заданному уравнению вращения тела
представляет собой дифференциальное
уравнение вращения твёрдого тела вокруг
неподвижной оси. По дифференциальному
уравнению можно решать следующие задачи:
1) по заданному уравнению вращения тела
 и его моменту инерции
и его моменту инерции
 определять главный момент внешних сил,
действующих на тело :
определять главный момент внешних сил,
действующих на тело :
 2) по заданным внешним силам, приложенным
к телу, по начальным условиям вращения
2) по заданным внешним силам, приложенным
к телу, по начальным условиям вращения
 и по моменту инерции
и по моменту инерции
 находить уравнение вращения тела
3) определять момент инерции тела
относительно оси вращения, зная величины
находить уравнение вращения тела
3) определять момент инерции тела
относительно оси вращения, зная величины
 и
и

19.1) Дифференциальные уравнения движения механической системы. Т- ма о движении центра масс системы.
2)Движение тел в воздухе при наличии сопротивления, пропорционального квадрату скорости.
1
)
эти уравнения называются уравнениями движения механ. сист. в вектр. ф – ме.
Теорема: Произведение массы механической системы на ускор. ее центра масс = гл. вектору всех действ на сист. внешних сил. Данная теорема позволяет глубже раскрыть значение матер. точки и изучения динамики ее движения.
2)
При движении
тел в газах в частности в воздухе при
скорости до 300 м\с сила сопротивления
пропорциональна квадрату скорости,
т.е. где x-
const


20.1)Закон сохранения движения центра масс. Примеры.
2)Решение задачи о движении тела, брошенного под углом к горизонту.
1)
А) Если гл. вектор внешних сил, прилож. к механ. сист. все время равен 0 то ее центр масс находится в покое или движется равномерно и прямолинейно.
Б) Если проекция гл. вектора внеш. сил на какую- нибудь неподвижную ось остается все время равным 0 то и проекция ц. масс механ. сист на эту ось движется равномерно и прямолинейно.
Рассмотрим пример, который позволяет применить т - му о движ. Центра масс: движение тела по горизонтальной шероховатой пов - ти. Перемещение ц. масс тела происходит за счет сцепления между обувью и поверхностью, т.е за счет внешних по отношению к человеку сил, то возникают эти силы только при соотв. напряж. мускулов человека, что создает позицию движения за счет них, однако если бы сцепление отсутствовало, то человек не мог бы перемещаться наверх.
 F>м>
F>м>






F>истр>
21.1) Кинетическая энергия материальной точки и механической системы. Вычисление кинетической энергии твердого тела в различных случаях его движения.
2)Закон сохранения количества движения механической системы. Примеры.
1
)Кинетической
энергией метер. т-ки называется величина
равная половине произведения ее массы
на квадрат скорости:
К
инетической
энергией механической системы называется
сумма кинетических энергий всех входящих
в нее материальных точек:
2)
Если главный вектор всех действующих на систему внешних сил равен 0, то вектор количества движения системы есть величина постоянная.
Если алгебраическая сумма проекций на какую-нибудь ось всех действующих на механическую систему внешних сил равна 0, то проекция вектора количества движения на эту ось есть величина постоянная.
22.1)Элементарная работа силы, ее аналитическое выражение. Работа силы на конечном пути. Работа силы тяжести.
2)Главные оси и главные моменты инерции. Свойства главных осей и главных центральных осей инерции.
1)Элементарной работой силы F называется скалярное произведение: A=(F∆r), где ∆r вектор элементарного перемещения точки, приложения силы, произошедшего в результате действия силы.
Р
абота
силы на конечном перемещении равна
алгебраической сумме ее работ на
отдельных элементарных участках:
П
ри
движении тела по непрерывной траектории
можно перейти к пределу при стремлении
числа участков к бесконечности и
получить:
2)Поскольку уравнение не содержит координат первой степени, то его центр совпадает с началом координат. Три оси симметрии эллипсоида инерции называются – главными осями инерции относительно точки 0, а момент инерции относительно осей – главным моментом инерции.
Если выбрать систему координат так, что бы оси совпадали с главными осями инерции механ. сист, то уравнение эллипса примет вид: J*>x> X2>*> + J*>y> Y2>*> + J*>z> Z2>* >= 1
Каждой точке соотв. свой эллипс инерции и если он известен, то можно найти момент инерции относительно любой оси, проходящей через данную точку. Эллипсоид, соотв. центру масс тела называется центральным эллипсоидом инерции, а его оси симметрии главными центральными осями инерции.
Если известны главные центры моментов инерции, то можно построить центр эллипсоид. инерции, а отсюда следует определение: моментом инерции относительно любой оси, проходящей через центр масс системы.
23.1) Работа силы упругости и силы тяготения. Работа сил, приложенных к твёрдому телу, вращающемуся вокруг неподвижной оси.
2)Теорема об изменении кинетического момента механической системы по отношению к центру масс.
Работа
силы упругости.

Работа силы тяготения.
Работа сил на конечном перемещении равна произведению главного момента внешних сил относительно оси вращения на конечное изменение угла поворота тела.
2)А) Относительно неподвижного центра Производная по времени от кинетического момента относительно неподвижного центра равна главному моменту всех внешних сил, действующих на систему относительно того же центра. Б) Относительно центра системы координат, движущимся поступательно вместе с центром масс. Производная по времени от кинетического момента механической системы, относительно центра системы координат, движущимся поступательно вместе с центром масс, равна главному моменту всех внешних сил, относительно центра масс.

2
4.1)Теорема
об изменении кинетической энергии мат
точки и механической системы в диффер
и конечной формах.
2)Потенциальная энергия мат точки и механ системы. Поверхность равного потенциала.
1
)ТЕОРЕМА.
Изменение кинетической энергии механ
системы на некотором перемещении = сумме
работ внешних и внутренних сил, действующих
на мат точки системы на этом перемещении.
Конечная форма.
2) Потенциальная энергия системы в любом данном её положении = сумме работ сил потенциального поля, приложенных к её точкам на перемещении системы из данного положения в нулевое.
П
усть
U=U(x
,y
,z)-
силовая функция поля.
П=П(x, y, z)- потенциальная энергия точки.
Уравнение П( x, y, z) определяет некоторую поверхность в пространстве, которая называется поверхностью равного потенциала или эквипотенциальной поверхностью.
25.1)Закон сохранения механической энергии системы при действии на неё потенциальных сил.
2)Количество движения точки и механической системы. Элементарный импульс и импульс силы за конечный промежуток времени.
1
)При
движении механической системы в
стационарном потенциальном поле полная
механическая энергия системы при
движении остается неизменной.
2)Количеством движения мат точки называется вектор, имеющий направление вектора скорости, и модуль, равный произведению массы точки m на модуль скорости её движения v.
Количеством движения механической системы называется вектор, равный геометрической сумме (главному вектору) количеств движения всех мат точек этой системы.
Если постоянная по модулю и направлению сила P действует течение промежутка времени
то её импульсом за этот промежуток времени является вектор
Список литературы
Для подготовки данной работы были использованы материалы с сайта http://www.shpora-zon.narod.ru/