Телемеханические системы
1
Основы телемеханики: назначение, виды и функции телемеханических систем
Основы телемеханики: назначение, виды и функции телемеханических систем
Телемеханика — область науки и техники, предметом которой является разработка методов и технических средств передачи и приёма информации (сигналов) с целью управления и контроля на расстоянии.
Специфическими особенностями телемеханики являются:
удалённость объектов контроля и управления;
необходимость высокой точности передачи измеряемых величин;
недопустимость большого запаздывания сигналов;
высокая надёжность передачи команд управления;
высокая степень автоматизации процессов сбора информации.
Назначение
Телемеханизация применяется тогда, когда необходимо объединить разобщённые или территориально рассредоточенные объекты управления в единый производственный комплекс (например, при управлении газо- и нефтепроводом, энергосистемой, ж. -д. узлом), либо когда присутствие человека на объекте управления нежелательно (например, в атомной промышленности, на химических предприятиях) или невозможно (например, при управлении непилотируемой ракетой).
Внедрение телемеханических систем позволяет сократить численность обслуживающего персонала, уменьшает простои оборудования, освобождает человека от работы во вредных для здоровья условиях.
Особое значение телемеханика приобретает в связи с созданием автоматизированных систем управления (АСУ). Обработка данных, полученных по каналам телемеханики, на ЭВМ позволяет значительно улучшить контроль за технологическим процессом и упростить управление. Поэтому в настоящее время вместо понятия "телемеханика" всё чаще и чаще используется сокращение АСУТП — автоматизированная система управления технологическим процессом. Современная система телемеханики также немыслима без компьютера, поэтому можно сказать, что телемеханика и АСУТП — близнецы-братья. Разница между этими понятиями улавливается лишь по времени появления и по традиции использования. Например, в энергетике предпочитают использовать слово телемеханика, на промышленных предприятиях — АСУТП.
В англоязычных источниках аналогом понятия "телемеханика" является сокращение SCADA — Supervisory Control And Data Acquisition — диспетчерское управление и сбор данных, в которое вкладывается, по сути, тот же смысл.
Области применения
Предприятия химической, атомной, металлургической, горнодобывающей промышленности, электрические станции и подстанции, насосные и компрессорные станции (на нефте- и газопроводах, в системах ирригации, тепло- и водоснабжения), ж.-д. узлы и аэропорты, усилительные и ретрансляционные установки на линиях связи, системы охранной сигнализации и т. д.
Пример построения телемеханической системы
Рассмотрим основные понятия, используемые в телемеханических системах, на примере так называемой двухуровневой системы, ставшей классической схемой.
Контроль и управление системой осуществляют с Пункта Управления (ПУ), где находится диспетчер, аппаратура телемеханики, ЭВМ, мнемонический щит.
Объекты контроля и управления находятся на Контролируемых Пунктах (КП), одном или нескольких.
Взаимодействие между ПУ и КП происходит по каналу связи. Это может быть простая физическая линия, оптоволокно, выделенный телефонный канал, радиоканал и т.п. При подключении к одному каналу связи нескольких КП каждый из них должен иметь уникальный номер.
Часто под ПУ и КП подразумевают саму аппаратуру телемеханики.
Данные между ПУ и КП передают короткими массивами, которые называют кадрами, фреймами, посылками. Посылки вместе с данными содержат адресную часть и проверочный код для выявления искажений в процессе передачи. Адрес должен однозначно идентифицировать измеряемый параметр в рамках всей системы, например, номер контроллера ПУ - номер КП - номер группы в КП - номер параметра в группе. Для защиты данных обычно используют один из вариантов подсчета контрольной суммы.
Способ кодирования данных и порядок обмена посылками обычно называют протоколом обмена. Одним из основных требований при выборе протокола является его надежность, т.е. способность передавать данные без искажений и возможность повторной передачи в случае сбоя.

Аппаратура телемеханики (обычно называемая контроллером) на КП собирает информацию об объекте посредством датчиков и преобразователей.
Датчиками могут быть простые двухпозиционные переключатели, состояние которых изменяется при изменении состояния объекта (включен/выключен, норма/авария и т.п.). Обычно контроллер КП следит за состоянием датчиков и при изменении хотя бы одного из них передает на ПУ посылку, которую называют ТелеСигналом (ТС). Контроллер ПУ, получив ТС, передает его на ЭВМ и контроллер щита. Программа на ЭВМ изменяет состояние изображения контролируемого объекта на схеме и предупреждает диспетчера звуковым сигналом. Контроллер щита зажигает на щите соответствующий индикатор.
Для количественной оценки состояния объекта на КП применяют преобразователи, которые преобразуют физические параметры (температура, давление, напряжение, ток) в нормированные электрические сигналы. Контроллер КП измеряет значения этих сигналов и передает их на ПУ в цифровом виде в посылках ТелеИзмерений (ТИ). Аналогично ТС, ТИ поступают на ЭВМ и щит для отображения. Программа для ЭВМ может отслеживать уровни приходящих измерений и сигнализировать, например, о превышении критического порога (уставки).
При необходимости вмешательства в ход контролируемого процесса оператор посредством ЭВМ выдает в систему команду Телеуправления (ТУ). C ЭВМ команда поступает на контроллер ПУ, который передает его нужному КП. Контроллер КП при получении команды проверяет ее достоверность, выдает электрический сигнал для включения исполнительного механизма (например, запуск электродвигателя), передает на ПУ квитанцию о выполнении команды. Команды ТУ обычно двухпозиционные: ТУ Включить и ТУ Отключить.
Современные контроллеры КП могут получать информацию не только с датчиков и преобразователей, но и с различных микропроцессорных устройств, например, приборов учета, токовых защит. Для стыковки с такими устройствами применяют один из локальных интерфейсов, например, RS-485. Информационный обмен идет с использованием одного из совместимых протоколов, например, Modbus.
История
Термин "телемеханика" был предложен в 1905 году французским учёным Э. Бранли. Первоначально с понятием телемеханики связывали представление об управлении по радио подвижными военными объектами. Известны случаи применения боевой техники, оснащенной устройствами управления на расстоянии, в 1-й мировой войне.
Практическое применение телемеханики в мирных целях началось в 20-х годах 20 века, главным образом на ж.-д. транспорте: телеуправление ж.-д. сигнализацией и стрелками было впервые осуществлено в 1927 на железной дороге в Огайо (США). В 1933 в Московской энергосистеме (Мосэнерго) введено в эксплуатацию первое устройство телесигнализации. Серийное заводское производство устройств телемеханики в СССР впервые было организовано в 1950 на заводе "Электропульт".
Развитие телемеханики шло параллельно с развитием электроники и средств связи. Первые системы строили на релейных схемах. В 50-х годах на смену реле пришли более надежные полупроводниковые элементы. В конце 60-х годов началось использование интегральных схем.
В конце 80-х годов в схемотехнике систем телемеханики произошел качественный скачок. Вместо микросхем жесткой логики в контроллерах стали использовать микропроцессоры. Это позволило гибко адаптировать аппаратуру под решение конкретной задачи путем замены программного обеспечения. В 1992 году был изготовлен первый в Беларуси комплекс телемеханики "Сириус", построенный на восьмиразрядных микропроцессорах. Часть программного обеспечения и конфигурация системы загружалась в память контроллеров с ПЭВМ.
Современные программно-технические комплексы (например, ПТК АРКОНА, разработанный в 2001 году) строят также на основе микропроцессорных контроллеров. В настоящее время это 16 и 32-разрядные системы с высоким быстродействием и достаточным объемом памяти. Всё большее значение имеет программное оснащение контроллеров. Для хранения программ и данных применяют FLASH-память, позволяющую легко менять программу и обеспечивать быстрый перезапуск системы в случае сбоя.
Тенденции развития
В современной системе телемеханики большое внимание уделяется программному обеспечению системы и интеграции с действующими системами и программными комплексами. Стандартом стало графическое представление схем контролируемого процесса (мнемосхем) с "живым" отображением текущего состояния, управление объектом с кадров мнемосхем.
В программном обеспечении наблюдается тенденция к стандартизации программных интерфейсов систем сбора данных и обрабатывающих программ (технология OPC), возрастает потребность экспорта собранных данных в специализированные программы (расчета режимов, планирования, аналитические, АРМ специалистов). В условиях усложнения систем повышается роль средств диагностики и отладки.
С технической стороны в системах всё чаще используются современные скоростные каналы связи (оптоволокно, Ethernet) и беспроводные технологии (например, транкинговая и сотовая связь). Вместе с тем сохраняется потребность стыковки с морально (а иногда и физически) устаревшими "унаследованными" системами, с сохранением их протоколов связи. На контролируемых объектах всё чаще возникает необходимость стыковки с локальными технологическими системами.
Наряду с усложнением самих систем и их программного обеспечения наблюдается изменение требований к реализуемым функциям. К традиционным функциям телемеханики (телесигнализация, телеизмерение, телеуправление) добавляются функции энергоучета, транспорта данных с локальных автоматических приборов. К обычным функциям контроля за изменением состояния и превышения предельных значений добавляются возможности текущих расчетов и логического анализа (например, балансные расчеты).
Современная автоматизация индустрии предъявляет все большие требования к центральному управлению всеми приводами, также как и датчиками и актуаторами (например, фотодатчики, температурные датчики, бесконтактные датчики и т. д.).
Эти требования могут быть реализованы стандартным параллельным соединением компонентов системы или интеллектуальной последовательной сетью.
Идет тенденция к использованию сетевых систем, КЕВ предлагает несколько решений в зависимости от платы управления:
обычный RS 485-интерфейсс протоколом DIN 66019 Profibus - интерфейс
CAN-Bus - интерфейс I nterBus-S - интерфейс LON - интерфейс
ANSI протокол Х3.28 (DIN 66019) встроен во все стандартные карты управления. Он позволят организовать последовательную сеть до 30 инверторов без дополнительного аппаратного оборудования. Разнообразные протоколы отличаются аппаратно (например, интерфейсами и соединениями), программно ( например, передающим протоколом), возможностью подсоединения контроллеров разных производителей, а также различные технические данные (например, допустимо Применение сетей для преобразователей частоты предоставляют пользователю разнообразные преимущества:
Меньшее расходование кабеля по сравнению с традиционным соединением, большее число инверторов объединены в сеть друг с другом. Также установка становится существенным образом проще.
Инвертор становится "прозрачным" для контроллера, т. е. все параметры могут быть введены в инвертор и/или считаны по шине. Считываемые параметры (например, загрузка инвертора) могут быть прочитаны контроллером, и использованы, например, в качестве основы для изменения входных параметров. Загрузка полной параметризации происходит в течении короткого промежутка времени без каких-либо трудностей.
• Установленное значение устанавливается в цифровом виде и, таким образом, точно, и может быть воспроизведено без фоновых наводок и помех напряжений.
• Диагностировать ошибки проще, потому что ошибки могут быть сохранены. Также ранняя диагностика ошибок (например, значительное увеличение нагрузки в результате недостачи смазки в подшипниках и последующая поломка машины) может быть реализована при сетевом соединении инверторов с соответствующим программным управлением. Добавление оборудования обычно не вызывает каких-либо проблем, поскольку дополнительные элементы легко подсоединяются к шине. И в основном, нет необходимости прокладывать длинные кабели от каждого инвертора к контроллеру.
Благодаря цифровой передаче сигнала возможна передача
на большие расстояния без особых проблем (в зависимости
от способа передачи и интерфейса).
Повышенная надежность против неправильной работы,
поскольку все параметры могут быть перезагружены
программно в любой точке (Функция загрузки). С помощью
вcтроенных функций диагностики, например, можно сразу же
определить прерывание линии.
Не нужны аналоговые входные и выходные модули PLC,
следовательно меньшие денежные и программные расходы. расстояние, скорость передачи, число участников).
Специальные асинхронные машины: сельсины, преобразователи частоты. Назначение, устройство и принцип действия.
Сельсины
Сельсином называется информационная электрическая машина переменного тока, вырабатывающая напряжения, амплитуды и фазы которых определяются угловым положением ротора.
Сельсины позволяют осуществить без общего механического вала согласованное вращение или поворот механизмов.
Известны два режима работы сельсинов: индикаторный и трансформаторный. При работе сельсинов в индикаторном режиме происходит передача на расстояние угла поворота механической системы.
При работе сельсинов в трансформаторном режиме передается сигнал, воздействующий на исполнительный механизм таким образом, чтобы заставить его отработать заданный поворот.
Рассмотрим устройство и принцип действия однофазных двухполюсных контактных сельсинов. Однофазная обмотка возбуждения, включенная в сеть переменного тока, расположена на явнополюсном статоре. На роторе размещены три пространственно смещенные относительно друг друга под углом 120o катушки синхронизации. Концы катушек соединены в общий узел, начала катушек выведены на контактные кольца. Обмотка возбуждения создает пульсирующий магнитный поток. Этот поток индуктирует трансформаторные ЭДС в катушках синхронизации. Наибольшая ЭДС индуктируется в катушке, ось которой совпадает с осью пульсирующего потока. При отклонении оси катушки ЭДС уменьшается по синусоидальному закону. Величина и фаза ЭДС в каждой катушке зависит от угла поворота ротора сельсина.

Рис. 13.1
На рис. 13.1 приведена схема соединения однофазных сельсинов при индикаторном режиме работы.
В схеме используются сельсин - датчик и сельсин - приемник, представляющие собой два совершенно одинаковых сельсина.
ОВ>д> и ОВ>п >- обмотки возбуждения сельсина - датчика и сельсина - приемника.
С>д> и С>п> - катушки синхронизации.
Если роторы обоих сельсинов
ориентированны одинаковым
образом
относительно обмоток
возбуждения, то в каждой паре катушек
индуктируются одинаковые ЭДС. Катушки
роторов обоих сельсинов соединены таким
образом, что ЭДС в них направлены встречно
друг другу, и ток в соединительных
проводах отсутствует. Такое положение
сельсинов называется согласованным.
Если повернуть ротор сельсина - датчика на угол θ , то в соответствующих катушках роторов наводятся различные по величине ЭДС, и в них возникают токи, которые, взаимодействуя с магнитными полями обмоток возбуждения, создают вращающие моменты. Ротор датчика удерживается в повернутом положении, следовательно, ротор приемника будет поворачиваться до тех пор, пока не исчезнет вращающий момент, т.е. пока не исчезнут токи в катушках сельсина, а это произойдет, когда ротор сельсина - приемника повернется на тот же угол θ , возникнет новое согласованное положение роторов сельсина - датчика и сельсина - приемника. На роторе сельсина - приемника устанавливаются стрелка и шкала, показывающие угол поворота сельсина - датчика.
Если необходимо осуществить дистанционную передачу угла поворота к механизму, требующему большого вращающего момента, то используется схема трансформаторного режима работы сельсинов (рис. 13.2).
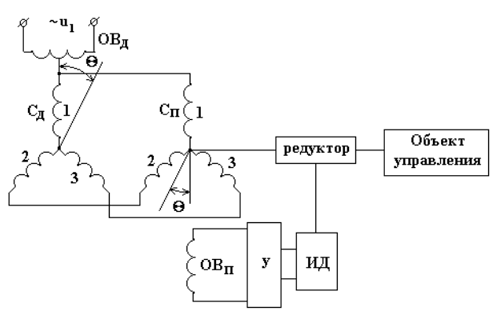
Рис. 13.2
Обмотка возбуждения сельсина - датчика подключается к источнику однофазного тока. Катушки синхронизации датчика соединены с катушками синхронизации приемника, который работает как сельсин - трансформатор. Катушки синхронизации С>П> являются первичной обмоткой, а статорная обмотка ОВ>П> - вторичной (выходной) обмоткой. Она через усилитель у cоединяется с исполнительным двигателем. Исполнительный двигатель через редуктор связан с валом сельсина - приемника.
Обмотка возбуждения датчика образует пульсирующий по горизонтали магнитный поток. В катушках С>Д> индуктируются ЭДС, которые создают токи в роторных катушках датчика и приемника. Каждая катушка синхронизации сельсина - приемника создает свой магнитный поток, а результирующий магнитный поток имеет такое же направление, как и поток в сельсине - датчике.
В обмотке возбуждения сельсина - премника индуктируется ЭДС, величина и фаза которой зависят от угла и направления результирующего потока обмотки синхронизации приемника. Ось обмотки возбуждения приемника сдвинута на 90o относительно оси обмотки возбуждения датчика, поэтому, когда магнитный поток направлен горизонтально, в обмотке приемника ОВП не возникает никакой ЭДС. Это согласованное положение в трансформаторном режиме.
Если ротор сельсина - датчика повернуть на угол θ , то результирующий магнитный поток в роторе сельсина - приемника повернется тоже на угол θ , а на зажимах обмотки ОВ>П> появится напряжение, зависящее от угла θ . Это напряжение подается на вход усилителя, а затем на исполнительный двигатель. Двигатель вращается, поворачивая обмотки управления. Вал ротора сельсина - приемника через редуктор связан с валом объекта управления. Когда вал объекта управления повернется на нужный угол, одновременно с ним повернется на угол θ вал сельсина - приемника. Возникнет новый согласованный режим, и движение прекращается.
Исполнительный механизм и сельсин - датчик не нуждаются в механической связи и могут находиться на большом расстоянии друг от друга.
Электрические системы дистанционной передачи угла поворота или вращения механизмов используются в радиолокаторах, в радиопеленгаторах и другой специальной технике.
Поворотные трансформаторы
Индуктосины. Редуктосины
Поворотным, или вращающимся, трансформатором называется информационная электрическая машина, амплитуда выходного напряжения которой является функцией входного напряжения и углового положения ротора.
Поворотные трансформаторы конструктивно сходны с асинхронными машинами с фазным ротором и контактными кольцами. К ним обычно подводится питание со стороны статора от источника переменного напряжения. На обмотке ротора (на выходе) получают напряжение, представляющее собой определенную функцию угла поворота ротора α. Обычно требуется, чтобы это напряжение было пропорционально sin α, cos α. В соответствии с этим, различают синусные, косинусные и синус - косинусные трансформаторы.
На рис. 13.3 представлена принципиальная схема поворотного трансформатора с двумя взаимно-перпендикулярными обмотками на статоре и на роторе.

Рис. 13.3
Назовем оси обмоток статора S и K соответственно продольной d и поперечной q осями поворотного трансформатора. Статорную обмотку S подключим к источнику переменного напряжения. Обмотка создает продольное пульсирующее магнитное поле, которое будет индуктировать в роторных обмотках А и В ЭДС. Значения электродвижущих сил зависят от угла поворота ротора α.
При синусоидальном распределении поля вдоль окружности ротора напряжение на обмотке А будет меняться при повороте ротора пропорционально sin α, а напряжение на обмотке В - пропорционально cos α. При использовании обеих обмоток ротора получим синус-косинусный поворотный трансформатор.
Токи в роторных обмотках создают продольную составляющую магнитного потока, направленную встречно магнитному потоку статорной обмотки S, и поперечную составляющую потока, направленную перпендикулярно магнитному полю обмотки S. Вследствие появления поперечной составляющей, нарушится синусоидальный и косинусоидальный законы изменения ЭДС от угла поворота ротора α.
Для компенсации полученной составляющей магнитного поля роторных обмоток на статоре размещается компенсационная обмотка К, замкнутая накоротко, под углом 90o к обмотке S.
Эта обмотка создает магнитный поток, направленный встречно поперечной составляющей магнитного потока ротора, и ослабляет ее. В результате, погрешность поворотного трансформатора уменьшается.
Индукционный редуктосин представляет собой бесконтактный синус-косинусный поворотный трансформатор. Первичная и две вторичные обмотки размещены на статоре. Ротор выполнен в виде зубчатого кольца из электротехнической стали.
Редуктосины не имеют скользящих контактов, что повышает надежность и точность их работы. При питании первичной обмотки синусоидальным напряжением со вторичных обмоток снимают два напряжения, амплитуды которых изменяются в функции угла поворота ротора. Повороту ротора на угол, равный зубцовому делению, соответствует полный период изменения амплитуды выходного напряжения (зубцовым делением ротора называется расстояние между зубцами ротора).
Индуктосином называют бесконтактную информационную машину без магнитопровода с печатными первичной и вторичной обмотками, возбуждаемую однофазным напряжением. Выходное напряжение индуктосина является функцией углового положения ротора.
Конструктивно индуктосин представляет собой два диска (ротор и статор) из изоляционного материала (керамика, стекло). Один из дисков соединяется с валом, угловое положение которого подлежит изменению, второй неподвижен. На торцевых поверхностях, обращенных друг к другу, диски несут печатные обмотки.
Поворотные трансформаторы используются в электрических счетно-решающих системах, в следящих системах в качестве датчиков угла, в преобразователях "угол-код", в системах числового и программного управления металлорежущими станками
Кабельные линии (КЛ): эксплуатация, обслуживание, методы обнаружения повреждения. [5]
Кабельные линии непосредственно после их сооружения и в процессе эксплуатации подвергаются разнообразным испытаниям, с помощью которых выявляются ослабленные места или дефекты в изоляции и защитных оболочках кабелей, соединительной и концевой арматуры и других элементах кабельных линий.
Причины возникновения таких ослабленных мест весьма различны. Они могут возникать при изготовлении кабеля и арматуры на заводе из-за конструктивных недостатков кабеля и арматуры, при небрежной прокладке кабельных линий, при некачественном выполнении монтажных работ. Ослабленные места выявляются в процессе эксплуатации КЛ, так как со временем наблюдается старение изоляции кабелей и коррозия их металлических оболочек.
Кабельные линии, проложенные в земляной траншее, невзирая на дополнительную защиту в виде покрытия кирпичом и систематическое наблюдение за состоянием трассы линий, весьма подвержены внешним механическим повреждениям, которые могут возникать при прокладке и ремонте других городских подземных сооружений, проходящих по трассе КЛ.
За исключением прямых механических повреждений, ослабленные места и дефекты КЛ имеют скрытый характер. Своевременно не выявленные испытаниями они могут с той или иной скоростью развиваться под воздействием рабочего напряжения. При этом возможно полное разрушение элементов КЛ в ослабленном месте с переходом линии в режим короткого замыкания и ее отключение с соответствующим нарушением электроснабжения потребителей.
Испытание повышенным выпрямленным напряжением:
Результаты испытания кабеля считаются удовлетворительными, если не наблюдалось скользящих разрядов, толчков тока утечки или нарастания установившегося значения и если сопротивление изоляции, измеренное мегаомметром, после испытания осталось прежним. Сопротивление изоляции до и после испытания не нормируется До и после испытания кабелей на напряжение выше 1 кВ повышенным выпрямленным напряжением производится измерение сопротивления изоляции мегаомметром на напряжение 2500 В
Измерение сопротивления изоляции проверяется мегаомметром на напряжение 2500 В в течение 1 мин. Сопротивление изоляции должно быть не ниже 0,5 Мом
Измерение нагрузки Токовые нагрузки должны удовлетворять требованиям ПУЭ Должно производиться ежегодно не менее 2 раз, в том числе 1 раз в период максимальной нагрузки линии
Рассмотрим особенности испытания кабельных линий повышенным напряжением.
Применение выпрямленного напряжения для испытания КЛ весьма эффективно. Для этих целей применяются транспортабельные испытательные установки ограниченной мощности и габаритов. Последнее определяется тем, что параметры таких установок зависят от тока утечки и изоляции КЛ, в то время как при использовании повышенного переменного напряжения параметры установок определяются емкостью линий, которая для КЛ весьма значительна. При этом выпрямленное напряжение, по сравнению с таким же по величине напряжением, оказывает малое воздействие на неповрежденную изоляцию кабельных линий.
Испытание выпрямленным напряжением, к сожалению, выявляет не все ослабленные места изоляции КЛ. В частности, не выявляются: электрическое старение изоляции; осушение изоляции из-за перемещения или стекания пропиточного состава; высыхания изоляции из-за тяжелого теплового режима работы кабельных линий.
Испытания повышенным напряжением являются разрушающими, так как при приложении испытательного напряжения изоляция КЛ в месте дефекта доводится до полного разрушения (пробоя). После пробоя необходим ремонт линии в том или ином объеме.
Разрабатываемые в последнее время методы специальной дефектоскопии электрооборудования, с помощью которых ослабленное место испытуемого объекта выявляется без его разрушения, к сожалению, не затрагивают испытания кабельных линий.
Различаются приемосдаточные испытания (П), испытания при капитальном (К) и текущем (Т) ремонтах, а также межремонтные испытания (М). Для кабельных линий городских сетей характерны испытания П,К и М.
ри этом испытания К и М согласно принятой терминологии носят названия профилактических испытаний (ПИ).
ВИДЫ ПОВРЕЖДЕНИЙ И ПРОЖИГАНИЕ КАБЕЛЬНЫХ ЛИНИЙ
После пробоя КЛ по причине отказа или в результате испытания, за исключением прямых механических повреждений, возникает необходимость в определении места повреждения линии. В настоящее время имеются совершенные методы, с помощью которых место повреждения, как правило, устанавливается с достаточной точностью и в ограниченное время.
Каждый метод имеет свою область использования, которая определяется характером повреждения КЛ и, в том числе, переходным сопротивлением, возникающем в месте повреждения. В связи с этим перед определением места повреждения необходимо определить характер повреждения, а также произвести при необходимости прожигание кабеля с целью снижения переходного сопротивления в месте повреждения его изоляции до требуемого уровня.
Повреждения КЛ имеют различный характер: повреждение изоляции с замыканием одной жилы на землю; повреждение изоляции с замыканием двух или трех жил на землю, двух или трех жил между собой в одном или в разных местах; обрыв одной, двух или трех жил с заземлением и без заземления жил; заплывающий пробой изоляции; сложные повреждения, содержащие указанные виды повреждений. Наиболее распространенный случай – это повреждение между жилой и оболочкой кабеля, т.е. однофазные повреждения, особенно для кабелей с жилами в самостоятельных оболочках.
Все измерения на КЛ производятся с их полным отключением и выполнением необходимых мер техники безопасности. Как правило, определение характера повреждения производится с помощью мегомметра на 2500 В, которым измеряется сопротивление изоляции каждой жилы по отношению к земле и сопротивление изоляции между жилами. Целостность жил проверяется с обоих концов линии путем поочередной установки закоротки на концах линии. Для кабельных линий 0,38 кВ могут использоваться приборы типа МС-0,5, МС-0,8, ТТ-1 и т.п. При определении характера сложного повреждения используются измерители неоднородностей кабельных линий типов Р5-1А, Р5-5, Р5-9, а при необходимости характер уточняется с помощью поочередного испытания выпрямленным напряжением изоляции каждой жилы по отношению к оболочке и между жилами.
В процессе определения характера повреждения, как отмечалось, устанавливается необходимость прожигания изоляции КЛ в месте повреждения. Значение переходного сопротивления, до которого необходимо вести процесс прожигания изоляции, указан ниже.
Процесс прожигания кабеля достаточно трудоемкий и требует специальной аппаратуры, которая должна иметь достаточную мощность и широкие диапазоны ее регулирования.
Процесс характеризуется многократным повторением электрического пробоя изоляции кабеля в месте его повреждения, что позволяет постепенно снизить переходное сопротивление в месте повреждения до требуемого значения. При этом по мере снижения сопротивления напряжение пробоя уменьшается и одновременно возрастают ток в цепи пробоя и мощность установки для прожигания.
Прожигание КЛ может производиться с использованием переменного или выпрямленного напряжения. При этом использование резонансных установок не рекомендуется.
МЕТОДЫ ОПРЕДЕЛЕНИЯ МЕСТ ПОВРЕЖДЕНИЯ КАБЕЛЬНЫХ ЛИНИЙ
При определении мест повреждения кабельных линий необходимо соблюдать серьезные требования: погрешность не должна превышать 3 м (при этом учитываются трудности производства земляных работ на городских проездах с усовершенствованным покрытием); выполнение ОМП должно ограничиваться несколькими часами; должны соблюдаться правила безопасности персонала. Указанные требования усиливаются необходимостью быстрейшего ремонта КЛ при ее повреждении, так как при выводе линии в ремонт нарушается надежность электроснабжения потребителей и возрастают потери электроэнергии в сети. Для кабельных линий, проложенных в земляной траншее, следует учитывать опасность проникновения влаги в изоляцию в результате нарушений герметичности, возникающих в месте повреждения.
Проникновение влаги может быть весьма интенсивным и распространяться на значительную длину вдоль линии.
При быстром определении места повреждения ремонт линии ограничивается заменой участка кабеля длиной 3—5 м и монтажом двух соединительных муфт, в благоприятных случаях может быть установлена одна муфта. Если работы по определению места повреждения затягиваются, что ведет к проникновению влаги, то возникает необходимость замены участка кабеля с увлажненной изоляцией длиной уже в несколько десятков метров,
Это, в свою очередь, увеличивает объем земляных работ и ведет к удорожанию ремонта линии.
В соответствии с установившейся практикой определяют место повреждения в два приема: сначала определяют зоны повреждения кабельной линии, затем уточняется место повреждения в пределах зоны. На первом этапе определение места повреждения производится с конца линии, на втором этапе — непосредственно на трассе линии. В связи с этим методы соответственно разделяются на дистанционные (относительные) и топографические (абсолютные
МЕРЫ ПРЕДОСТОРОЖНОСТИ ПРИ ОБСЛУЖИВАНИИ КАБЕЛЬНЫХ ЛИНИЙ
Наряду с общими требованиями техники безопасности, которые выполняются при работах на кабельных линиях, существуют дополнительные для допуска к работам на действующих линиях. Такой допуск необходим для проведения следующих основных операций: всестороннее отключение линии; заземление линии; определение линии на трассе; прокол кабеля и его заземление на месте производства работ, разрезание кабеля и при необходимости вскрытие муфты.
На трассе перед ремонтом должны быть вскрыты все кабели и путем тщательной проверки исполнительных чертежей определена линия, подлежащая ремонту.
Дополнительно к этому ремонтируемая линия определяется с помощью переносных приборов индукционного типа.
После определения кабеля производится проверка отсутствия на нем напряжения.
Согласно ПТБ такая проверка должна производиться специальным приспособлением, обеспечивающим прокол кабеля до жил и их заземление. При этом в колодцах и туннелях приспособление должно иметь дистанционное управление.
Выпускаемое промышленностью устройство с изолированной штангой и сверлом громоздко и может применяться только в траншеях. В ЛКС совместно с трестом № 45
Главзапстроя разработано пиротехническое устройство, которое обеспечивает прокол ленточной брони и оболочки до жил с замыканием их между собой и на землю. Устройство может применяться в любых условиях. На плите устройства (рис. 1-7) установлен ствол, в котором имеется патронник и поршень с пробойником, затвор с кольцом для завода в боевое положение, фиксация которого производится с помощью чеки. Устройство закрепляется на кабеле с помощью хомутов.
При работе устройства применяются пиротехнические патроны МПУ-2. Для производства выстрела чека выдергивается с помощью капронового шнура, длина которого принимается с учетом обеспечения безопасности оператора. Диаметр прокалываемого кабеля 20—66 мм, масса прибора 4,2 кг. При работе устройство заземляется, а также выполняются другие меры безопасности при работах с пиротехническим инструментом.
МЕРЫ ПРЕДОСТОРОЖНОСТИ ПРИ ВСКРЫТИИ МУФТ, РАЗРЕЗАНИИ КАБЕЛЯ
Перед вскрытием муфт или разрезанием кабеля необходимо удостовериться в том, что эти операции будут производиться на том кабеле, на каком нужно, что этот кабель отключен и выполнены технические мероприятия, необходимые для допуска к работам на нём.
На рабочем месте подлежащий ремонту кабель следует определять: при прокладке кабеля в туннеле, коллекторе, канале, по стенам зданий—прослеживанием, сверкой раскладки с чертежами и схемами, проверкой по биркам; при прокладке кабелей в земле—сверкой их расположения с чертежами прокладки. Для этой цели должна быть предварительно выполнена контрольная траншея (шурф) поперек пучка кабелей, позволяющая видеть все кабели.
В тех случаях, когда нет уверенности в правильности определения подлежащего ремонту кабеля, применяется кабелеискательный аппарат с накладной рамкой.
На КЛ перед разрезанием кабеля или вскрытием соединительной муфты необходимо проверить отсутствие напряжения с помощью специального приспособления, состоящего из изолирующей Штанги и стальной иглы или режущего наконечника. Приспособление должно обеспечить прокол или разрезание брони и оболочки до жил с замыканием их между собой и на землю. Кабель у места прокола предварительно прикрывается экраном. В туннелях, коллекторах и колодцах такое приспособление допускается применять только при наличии дистанционного управления.
Если в результате повреждений кабеля открыты все токоведущие жилы, отсутствие напряжения можно проверить непосредственно указателем напряжения без прокола.
Прокол кабеля выполняет ответственный руководитель работ или допускающий либо под их наблюдением производитель работ. Прокалывать кабель следует в диэлектрических перчатках и пользуясь предохранительными очками. Стоять при проколе нужно на изолирующем основании сверху траншеи как можно дальше от прокалываемого кабеля.
Для заземления прокалывающего приспособления используются специальный заземлитель, погруженный в почву на глубину не менее 0,5 м, или броня кабеля. Заземляющий проводник присоединяется к броне хомутами; бронелента под хомутом должна быть очищена.
В тех случаях, когда бронелента подвергалась коррозии, допускается присоединение заземляющего проводника к металлической оболочке.
При работах на кабельной четырехжильиой линии напряжением до 1000 В нулевая жила отсоединяется с обоих концов.
Схемы распределения цеховых электросетей: типы схем, изображение.
СХЕМЫ РАСПРЕДЕЛЕНИЯ ЭЛЕКТРОЭНЕРГИИ
Распределение электроэнергии на промышленном предприятии должно выполняться по радиальной, магистральной или смешанной схеме в зависимости от территориального размещения нагрузок, величины потребляемой предприятием мощности, надежности питания и других характерных особенностей проектируемого объекта. Магистральным схемам следует, как правило, отдавать предпочтение, как более экономичным.
Схемы следует выполнять одноступенчатыми и двухступенчатыми. Схемы с числом ступеней более двух допускаются при развитии предприятия в случаях их технико-экономической целесообразности.
На малых предприятиях должны, как правило, применяться одноступенчатые схемы распределения энергии; вторую ступень допускается применять лишь для удаленных от приемного пункта потребителей.
Схема распределения должна строиться так, чтобы все ее элементы постоянно находились под нагрузкой, а при аварии на одном из них оставшиеся в работе могли принять на себя его нагрузку, путем перераспределения ее между собой с учетом допустимой перегрузки.
Специальные резервные (нормально не работающие) линии и трансформаторы предусматриваться не должны.
Должна применяться, как правило, раздельная работа линий и трансформаторов с использованием перегрузочной способности указанных элементов в послеаварийных режимах.
Параллельная работа допускается:
при питании ударных резкопеременных нагрузок;
если автоматическое включение резерва (АВР) не обеспечивает восстановление питания для самозапуска электродвигателей и при вероятности неселективного действия релейной защиты;
если исключена возможность включения несинхронных напряжений при действии АВР.
При построении схем электроснабжения потребителей I и II категорий должно проводиться глубокое секционирование шин во всех звеньях системы распределения энергии от узловой подстанции и до шин низшего напряжения цеховых подстанций и распределительных пунктов.
Выбор схем и элементов электроснабжения должен производиться с учетом обязательного обеспечения самозапуска электродвигателей ответственных агрегатов и исключения его для неосновных механизмов.
Схемы распределения электроэнергии на первой ступени от источника питания до РП при напряжении 6-10 кВ принимаются следующие:
на больших энергоемких предприятиях - магистральные схемы, осуществляемые с помощью токопроводов до 35 кВ;
на больших и средних предприятиях - как радиальные, так и магистральные схемы; при этом отдельные секции РП, нормально работающие раздельно, присоединяются к разным магистралям.
Необходимость сооружения РП определяется технико-экономическими расчетами. Вопрос о сооружении РП следует рассматривать, как правило, при числе отходящих линий не менее 8.
Суммарная мощность нагрузки секций РП должна обеспечивать полное использование пропускной способности головных выключателей линии, питающих эти секции.
При системе глубоких вводов напряжением 35-330 кВ распределение электроэнергии на первой ступени между ПГВ следует предусматривать по радиальным или магистральным, воздушным или кабельным линиям от УРП предприятия или от районной подстанции энергосистемы.
Магистральные токопроводы напряжением 6-10 кВ для токов более 1,5 - 2 кА в связи с их более высокой надежностью и перегрузочной способностью, а также возможностью высокой степени индустриализации электромонтажных работ следует применять преимущественно перед линиями, выполненными из большого числа параллельных кабелей.
Целесообразность применения токопроводов напряжением 35 кВ определяется технико-экономическими расчетами в проекте (см. пп. 11.5-11.7).
Направление токопроводов следует выбирать так, чтобы они проходили через зоны размещения основных электрических нагрузок.
Магистральные схемы напряжением 6-10 кВ при кабельной прокладке должны применяться:
при расположении подстанций, благоприятствующем прямолинейному прохождению магистрали;
для группы технологически связанных агрегатов, если при остановке одного из них требуется отключение всей группы;
во всех других случаях, когда они имеют технико-экономические преимущества по сравнению с другими схемами.
Магистральные схемы с двумя и более параллельными магистралями применимы для питания потребителей любой категории.
Двойные магистрали следует применять при наличии подстанций с двумя секциями шин или двух трансформаторных подстанций без сборных шин первичного напряжения.
Одиночные магистрали без резервирования следует применять для питания потребителей III категории. При этом, как правило, должны применяться воздушные магистрали, легко доступные для ремонта.
При наличии 15-20 % нагрузок I и II категорий должно быть применено питание соседних подстанций от разных одиночных магистралей для взаимного резервирования по перемычкам напряжением до 1000 В.
Одиночные магистрали с общей резервной магистралью применимы для питания потребителей III и частично II категорий, допускающих перерыв питания электроэнергией на время отыскания и отсоединения поврежденного участка магистрали.
Одиночные магистрали с общей резервной магистралью следует применять при необходимости резервного питания предприятия от независимого источника в послеаварийных режимах.
Одиночные и двойные магистрали с двухсторонним питанием должны применяться:
при необходимости питания от двух независимых источников по условиям надежности электроснабжения;
в случаях, когда расположение группы подстанций между двумя питающими пунктами создает экономические преимущества для данной схемы независимо от требуемой надежности питания.
Кольцевые магистрали на предприятиях допускается применять для питания потребителей III и частично II категории при соответствующем расположении питаемых ими групп подстанций и при единичной мощности трансформаторов не более 630 кВА.
Глухое присоединение на входе и выходе магистрали применяться, как правило, при воздушных магистралях, а также при обеспеченности необходимой степени резервирования (двойные магистрали, резервирование на стороне вторичного напряжения при одиночных магистралях и т.п.).
Ответвление от воздушной магистрали на подстанцию, как правило, следует применять глухое.
При системе двухтрансформаторных подстанций не следует устанавливать автоматическое отключающие аппараты (включатели, предохранители) на вводе к трансформатору, при соответствующем запасе мощности трансформаторов для взаимного резервирования и при обеспечении чувствительности защиты на головном участке магистрали к повреждениям в трансформаторе.
Число трансформаторов напряжением до 10 кВ, присоединяемых к одной магистрали, следует принимать, как правило, 2-3 при их мощности 1000-2500 кВА и 3-4 меньших мощностей.
Радиальные схемы следует применять при нагрузках, размещенных в различных направлениях от источника питания.
Одноступенчатые радиальные схемы следует применять для питания больших сосредоточенных нагрузок (насосные, компрессорные, преобразовательные подстанции, электрические печи и т.п.).
Двухступенчатые радиальные схемы следует применять на больших и средних предприятиях для питания через РП цеховых подстанций и электроприемников напряжением свыше 1000 В.
РУ-6-10 кВ подстанций с реактивированными линиями следует применять схемы с общим реактором на 2-4 линии и выключателем на каждой линии.
Допускаются схемы с присоединением под один выключатель двух линий, идущих к разным РП или ТП. В этом случае питание указанных РП и ТП должно предусматриваться не менее, чем по двум линиям, отходящим от разных секций источника питания. Применение отдельных реакторов на каждой линии допускается только при наличии необходимых технико-экономических обоснований.
Построение схемы электроснабжения следует осуществлять по блочному принципу с учетом особенностей технологической схемы объекта.
Питание электроприемников параллельных технологических потоков следует осуществлять от разных РП или ТП или от разных секций шин одного РП или одной ТП. Все взаимосвязанные технологические агрегаты одного потока должны питаться от одной секции шин.
Питание вторичных цепей не должно нарушаться при любых переключениях силовых цепей параллельных технологических потоков.
Радиальное питание цеховых двухтрансформаторных «бесшинных» подстанций следует осуществлять от разных секций РП, как правило, отдельными линиями для каждого трансформатора.
Взаимное резервирование на однотрансформаторных подстанциях следует осуществлять при помощи перемычек напряжением до 1000 В для тех подстанций, где оно необходимо по условиям надежности питания.
Цех сетей и подстанций
При выполнении технического проекта электроснабжения предприятия должны предусматриваться помещения и оборудование цеха или участка сетей и подстанций для обслуживания:
подстанций глубоких вводов напряжением 110-220/6-10 кВ;
внецеховых распределительных, трансформаторных и преобразовательных подстанций;
воздушных линий электропередачи напряжением 3220 кВ;
межцеховых кабельных сетей напряжением од и выше 1000 В;
установок и сетей наружного освещения территории предприятия;
трансформаторно-масляного хозяйства.
При разработке проекта реконструкции действующего предприятия, имеющего в своем составе цех либо участок сетей и подстанций, должны рассматриваться вопросы необходимого расширения производственных помещений цеха и доукомплектования оборудованием.
Цех сетей и подстанций должен предусматриваться для больших и средних предприятий. Для небольших предприятий должен предусматриваться участок сетей и подстанций.
Штаты отделов и служб цеха сетей подстанций определяются отраслевыми нормами, согласованными и утвержденными в установленном порядке.
Средства защиты в электроустановках до и выше 1000В: основные и дополнительные.
(Правила применения и испытания средств защиты, используемых в электроустановках, технические требования к ним. П.1.1.5)
К электрозащитным средствам относятся:
- изолирующие штанги всех видов;
- изолирующие клещи;
- указатели напряжения;
- сигнализаторы наличия напряжения индивидуальные и стационарные;
- устройства и приспособления для обеспечения безопасности работ при измерениях и испытаниях в электроустановках (указатели напряжения для проверки совпадения фаз, клещи электроизмерительные, устройства для прокола кабеля);
- диэлектрические перчатки, галоши, боты;
- диэлектрические ковры и изолирующие подставки;
- защитные ограждения (щиты и ширмы);
- изолирующие накладки и колпаки;
- ручной изолирующий инструмент;
- переносные заземления;
- плакаты и знаки безопасности;
- специальные средства защиты, устройства и приспособления изолирующие для работ под напряжением в электроустановках напряжением 110 кВ и выше;
- гибкие изолирующие покрытия и накладки для работ под напряжением в электроустановках напряжением до 1000 В;
- лестницы приставные и стремянки изолирующие стеклопластиковые.