Синтез системы радиального перемещения каретки
Содержание
1. Введение
2. Описание работы САРРП
2.1 Анализ воздействий, вызывающих ошибки в работе САР оптических дисковых систем
3. Составление структурной схемы САР и определение передаточных функций системы
4. Построение ЛАЧХ и ЛФЧХ нескорректированной системы
5. Синтез САР и расчет КУ
Литература
1. Введение
В настоящее время оптические дисковые системы нашли множество применений. Возможность записи значительного объема информации и простота тиражирования делает оптический диск очень привлекательным. В сфере записи и хранения данных системы с прямой оптической записью информации стали штатными периферийными устройствами компьютеров.
Просто осуществляемое сканирование по плоской поверхности диска при считывании, обеспечивающее быстрый доступ к информации, важное качество таких систем. Дополнительным достоинством оптических дисков является отсутствие физического контакта между считывающей головкой и несущем информацию слоем, так как считывание осуществляется пучком света, сфокусированным на этом слое. Защитный прозрачный слой, покрывающий носитель информации, предохраняет мелкие детали от повреждений и затеняющих частичек.
Как и в обычной граммофонной записи, информация расположена по спирали, которая называется дорожкой. Дорожка представляет собой спиральный прерывистый пунктир из меток записи. Метки являются маленькими областями, имеющими оптический контраст с окружающей их зеркальной поверхностью, например черные элементы в виде черточек или продолговатые углубления (питы) на поверхности. Метки вызывают изменение отражения от диска вдоль дорожки. Оптическая считывающая головка, которая в данном случае заменяет механическую иглу граммофона, преобразует изменения отражения в электрический сигнал. Для этого объектив головки фокусирует лазерный луч в маленькое пятно на дорожке и направляет луч, отраженный от диска, на фотоприемник. Таким образом, сигнал с фотоприемника модулируется во времени в соответствии с метками на дорожке вращающегося диска.

Л
З
D
O
Диск
Рис.1. Базовая оптика.
Высокая плотность в записи информации достигается с помощью оптических средств, которые представляют собой оптический сканирующий микроскоп со средним увеличением. Предел плотности записи обусловлен дифракцией света, которая определяет минимальный диаметр пятна в фокальной плоскости. Размер пятна пропорционален длине волны света λ, излучаемого полупроводниковым лазером. Для используемых в настоящее время лазеров это составляет 109 - 1011 бит на диск. На рис.1 показаны основные оптические элементы считывающей головки.
Излучение полупроводникового лазера Л фокусируется через прозрачную подложку диска на поверхность, несущую информацию, с помощью объектива микроскопного типа О. Часть отраженного света, собираемого тем же объективом, направляется полупрозрачным зеркалом З на детектор (фотоприемник) D. Для сканирования всего диска эта конструкция должна быть укреплена на каретке, перемещающейся по радиусу диска. При этом малые и кратковременные ошибки (отклонения) пятна от дорожки устраняются за счет перемещения компактной головки относительно каретки. Для слежения за дорожкой пятном света необходимы по крайней мере две системы управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном направлении (вдоль дорожки), предназначенная для компенсации высококачественных изменений скорости считывания.
Таким образом, в настоящее время оптические дисковые системы снабжены пятью системами автоматизированного регулирования, а именно:
Вращения диска (САРВ);
Тангенциального слежения (САРТ);
Радиального слежения за дорожкой (САРД);
Радиального перемещения каретки (САРРП);
– Вертикального слежения за фокусировкой (САРФ).
2. Описание работы САРРП
Системы радиального слежения за дорожкой обычно имеют малый диапазон смещения пятна. Для считывающей головки это, как правило, электромеханические ограничения, обусловленные свойствами подвески и привода. Они обуславливают диапазон радиального смещения в несколько миллиметров. Поэтому для считывания всего поля записи применяется подвижная каретка, на которой располагается оптический блок с САРД и САРФ. Если требуется быстрый доступ к далеко расположенным (относительно текущего положения) кадрам записи, требуется быстрое перемещение каретки, так называемый перескок каретки.
Каретка должна двигаться по направляющим таким образом, чтобы она могла свободно перемещаться только в одном направлении, причем, как правило, САРФ находится в активном состоянии. Поэтому небольшие перемещения в вертикальном направлении, вызванные радиальным движением каретки, не должны нарушать работу САРФ. В частности, например, отклонение перемещения каретки от плоскости диска не должно быть больше 0.5. Эти не особенно жесткие требования могут удовлетворяться несколькими системами направляющих устройств. Часто используются устройства, в которых каретка движется по двум параллельным стержням (направляющим) с подшипниками скольжения. Варианты, в которых подшипники скольжения заменены шариковыми подшипниками, имеют меньшее трение и большую точность задания движения. Это преимущество имеют также направляющие с V-образной канавкой, в которых размещаются шарики (линейный шарикоподшипник).
Привод каретки, исключая линейные приводы, состоит из обычного электродвигателя с редуктором и преобразователем вращательного движения в поступательное. Для получения более низкого уровня шума в редукторе используются, как правило, пластмассовые шестерни, а иногда применяется и ременная передача. Для преобразования вращательного движения в поступательное наиболее часто используются червячная передача, зубчатая рейка, зубчатый ремень, простой ремень (стальной или из синтетических материалов) и фрикционная передача.
Для качественной работы САРРП очень важно, чтобы между углом поворота мотора и смещением каретки не было мертвого хода. Наличие мертвого хода может привести к возникновению нежелательных в САРРП автоколебаний. Поэтому применяются передачи с люфтовыбирателями.
Если применяется линейный двигатель, то проблемы мертвого хода не возникает, поскольку управляющая сила действует непосредственно на каретку. Недостатком ЛЭД является его малая эффективность из-за большого диапазона смещения.
На рис. 2 показана кинематическая схема механизма перемещения каретки с использованием электродвигателей. Проблемы мертвого хода и преобразования вращательного движения в поступательное решаются с помощью натянутого зубчатого ремня, изготовленного из синтетического материала и имеющего сердцевину из стальной ленты. Это позволяет увеличить резонансную частоту передачи усилия от двигателя к каретке до 500 Гц и более. Направляющие выполнены с применением шарикоподшипников, обеспечивающих точное задание поступательного движения. Высокое значение резонансной частоты обеспечивается малой массой каретки, которая наряду с большой мощностью моторов позволяет получать очень высокие ускорения каретки. При этом появляется сила реакции, действующая на несущую конструкцию всего устройства, а это может привести к возникновению в ней нежелательных смещений и вибраций, ухудшающих работу всех САР. Для предотвращения этого и используются противовесы и два двигателя. Такая система привода позволяет скомпенсировать силы и моменты реакции. При близких характеристиках двигатели можно с приемлемой точностью рассматривать как один, с удвоенным моментом на валу.

2
Обычно используются электродвигатели постоянного тока с независимым возбуждением. Система уравнений для такого двигателя при управлении по цепи якоря имеет вид:

L>я>
 +
r>я>i>я
>- C>е>=U (1)
+
r>я>i>я
>- C>е>=U (1)
С>м>i>я
>– I
 =M>н>
(2)
=M>н>
(2)
Рис.3. Двигатель постоянного тока
где L>я >и r>я> - индуктивность и сопротивление нагрузки якорной цепи;
i>я >- ток якоря;
I - момент инерции якоря;
С>е> и С>м> - коэффициенты пропорциональности между скоростью вращения и противо-э.д.с и между током якоря и вращающим моментом.
Вводя оператор р= и решая уравнение относительно скорости
вращения
и решая уравнение относительно скорости
вращения
 , получим
, получим
 (3)
(3)
Для установившегося режима (р=0) получается зависимость
=
 ,
(4)
,
(4)
где k>1 >- коэффициент передачи двигателя по скорости;
- коэффициент наклона механической характеристики.
Данная зависимость представляет собой линеаризованные механические характеристики двигателя постоянного тока. Поэтому коэффициенты С>е> и С>м> могут быть подсчитаны по паспортным данным двигателя
 ;
;  ,
(5)
,
(5)
где U>ном >- номинальное напряжение двигателя;
>0> - угловая скорость идеального холостого хода (при U=U>ном> и M>н>=0);
I>ном> и М>ном> - номинальный ток якоря и вращающий момент.
В формуле (3) приняты обозначения:
- электромеханическая постоянная времени
 (6)
(6)
где М>0 >- пусковой момент при номинальном напряжении U=U>ном>;
- постоянная времени якорной цепи (электромагнитная постоянная времени)
Т>я>= . (7)
. (7)
Угол поворота двигателя может быть найден из формулы (3) интегрированием угловой скорости, что эквивалентно делению правой части (3) на оператор р:
= . (8)
. (8)
Поскольку в рассматриваемой системе двигатель используется без редуктора, работая практически в заторможенном режиме с минимальными скоростями вращения, он превращается в датчик момента. Поэтому вращающий момент М может быть найден из уравнения (2), поскольку в установившемся режиме М=М>н> , а 0, то
М=С>м>i>я>= (9)
(9)
В установившемся режиме (при р=0) получаем зависимость
М=k>2>U ,
где k>2>= - коэффициент передачи двигателя по
моменту.
- коэффициент передачи двигателя по
моменту.
При питании цепи якоря двигателя от усилителя мощности с выходным сопротивлением r>вых>, в вышеприведенных формулах нужно везде вместо r>я> использовать сумму (r>я> + r>вых>).
Момент М на валу двигателя с помощью шкива преобразуется в пару сил, результирующая F которых действует на каретку, приводя ее в движение по направляющим. При этом, поскольку используется два двигателя
F= , (10)
, (10)
где r – радиус шкива.
Движение каретки по координате х описывается уравнением:

где - коэффициент сил вязкого трения,
или в операторной форме:
p(T>1 >p + 1)x = kF,
где T>1 >=
 ;
;
k =
 .
.
В процессе длительного считывания диска положение каретки регулируется таким образом, чтобы САРД работала в основном вблизи своего нейтрального (нулевого) положения. Для этого требуется сигнал положения, несущий информацию об отклонении головки от нулевого положения.
При пружинной подвеске головки для получения сигнала положения каретки могут быть использованы низкочастотные составляющие сигнала, подаваемого на ЛЭД. Если головка подвешена свободно, то требуется отдельный датчик положения (датчик отклонения головки относительно каретки). В любом случае, этот сигнал после усиления и коррекции подается на электродвигатель, выдавая перемещение каретки в нужном направлении. Скорость изменения этого сигнала невелика, поэтому требуемая точность регулирования может быть получена при полосе регулирования в несколько Гц. На быстрые перемещения головки относительно каретки при работе САРД, САРРП в силу ограниченности полосы регулирования должна реагировать как можно меньше.
Для реализации быстрого доступа при поиске информации используется так называемый режим перескока. В этом режиме каретка передвигается в необходимое место с помощью импульса перескока, который подается на вход усилителя мощности и далее на двигатели. В первой половине действия этого импульса каретка разгоняется с максимальным ускорением, а во второй – тормозится. Длительность импульса зависит от ускорения и длины перескока и определяется выражением
t =z
=z ,
,
где q – расстояние между центрами дорожек;
n – число дорожек, на которое необходимо переместить каретку;
 – ускорение, реализуемое применяемым
двигателем.
– ускорение, реализуемое применяемым
двигателем.

Рис.4. Функциональная схема САРРП.
Это перемещение осуществляется при разомкнутой обратной связи. Затем, с помощью датчика положения, измеряется остаточная ошибка положения каретки, и при необходимости каретка перемещается в заданное положение с помощью системы управления с обратной связью. Во время движения каретки головка остается в нейтральном положении (САРД не работает), а после остановки каретки САРД начинает выполнять свои функции по поиску дорожки. В результате и появляется управляющий сигнал для уточнения положения каретки для САРРП. Функциональная схема САРРП приведена на рис.4.
Устройство переключения УП в режиме перескока на вход усилителя мощности подает сигнал с устройства, формирующего импульс перескока, а в режиме регулирования – с датчика положения головки относительно каретки.
2.1 Анализ воздействий, вызывающих ошибки в работе САР оптических дисковых систем
На первый взгляд может показаться, что необходимость в САР обусловлена только тем, что требуется точно следить за радиальным движением разворачивающейся архимедовой спирали дорожки записи на вращающемся диске, поддерживать на ней фокус и обеспечивать постоянство линейной скорости при считывании. Однако при более тщательном рассмотрении становится ясно, что на работу САР оказывают влияние и другие, менее очевидные факторы.
Формально определим ошибку САР в момент времени t как разность между требуемым и реальным значением регулируемого параметра.
Для системы автоматического регулирования скорости вращения диска основным источником ошибок является момент нагрузки М>Н>. Он складывается из постоянной М>Н ср> и переменной М>Н >>var> составляющих. Постоянная составляющая определяется силами аэродинамического сопротивления и трения в осях при постоянной скорости вращения диска. Переменная составляющая момента обусловлена действием внешних и внутренних возмущений, рассмотренных ранее, которые приводят, например, к изменению реакции опор оси двигателя, что, в свою очередь, вызывает изменение момента трения в этих опорах. Кроме того момент трения в опорах зависит от угла поворота вала с диском.
Однако наибольшее значение для САРВ имеет изменение момента М>Н> при изменении угловой скорости вращения диска. Если принять, что момент аэродинамического сопротивления пропорционален квадрату угловой скорости вращения диска, то

Наибольшее значение момент аэродинамического сопротивления имеет при ρ = ρ>min>
 .
.
Максимальная скорость изменения момента сопротивления может быть определена путем дифференцирования выражения и подстановки в полученное выражение t = t>0> и ρ = ρ>min>.
При необходимости аналогично может быть определена и вторая производная от момента сопротивления.
После определения источников появления ошибок, можно приступить к синтезу САР уменьшающих их до допустимого уровня.
3. Составление структурной схемы САР и определение передаточных функций системы
g(t)
СЭ
ИЭ
ОУ




ПЭ


y(t) – регулируемая величина
g(t) – задающее воздействие;
СЭ – сравнивающий элемент (датчик положения);
ПЭ – промежуточный элемент (корректирующее устройство(КУ));
ИЭ – исполнительный элемент (двигатель + привод);
ОУ – объект управления (каретка).
Задающее воздействие – номер дорожки; регулируемая величина – номер текущей дорожки. По разности g(t) и y(t) формируется сигнал ошибки.
Определим передаточные функции звеньев структурной схемы САР:
g(t)
W>сэ>(S)
W>ку>(S)
W>иэ>(S)
W>оу>(S)


–
1) Определим передаточную функцию СЭ, т.е. датчика положения из уравнения:
U>ф> = k>дп> x.
Составляем отношение выходной величины ко входной:
W(p) = k>дп>.
Переходя к преобразованию Лапласа, путем замены p на комплексную переменную s, получим передаточную функцию СЭ.
W(s)>СЭ> = k>дп>.
Т.к. k>дп> = 0,01 В/мкм, окончательно W>СЭ> = 0,01 В/мкм = 1 >* >104 В/м.
2) Определим передаточную функцию ИЭ:
W>ИЭ>(s) = W>дв>(s)>*>W>пр>(s).
Поскольку в рассматриваемой системе двигатель используется без редуктора, работая практически в заторможенном режиме с минимальными скоростями вращения, он превращается в датчик момента. Поэтому вращающий момент М может быть найден из уравнения:
C>м * >i>я> – J(d/dt) = M>н>,
где i>я >– ток якоря, J – момент инерции якоря,скорость вращения, C>м >– коэффициент пропорциональности между током якоря и вращающим моментом.
Т.к. в установившемся режиме
M = M>н>, а 0,
то
M = C>м * >i>я >= C>м>U / r>я>(1+T>я>p).
В установившемся режиме (при p = 0) получаем зависимость
M = k>2>U,
где k>2> = C>м> / r>я> = M>ном> / i>я ном >r>я> – коэффициент передачи двигателя по моменту. Составим отношение:



Для привода F = 2M / r; r – радиус шкива, М – момент на валу двигателя, F – результирующая сила, действующая на каретку.


Таким образом
Общий коэффициент усиления передаточной функции рассчитывается по формуле:
k = >max> / >max> = 50/10 = 5.
Таким образом, передаточная функция нескорректированной системы имеет вид:

но т.к. постоянные времени отличаются на четыре порядка, пренебрежем членом (1+0,0005S) в знаменателе и передаточная функция разомкнутой системы будет иметь вид:
Передаточная функция замкнутой системы:

Передаточная функция замкнутой системы по ошибке:

4. Построение ЛАЧХ и ЛФЧХ нескорректированной системы
Пользуясь комплексом по моделированию САР, строим ЛАЧХ и ЛФЧХ системы.
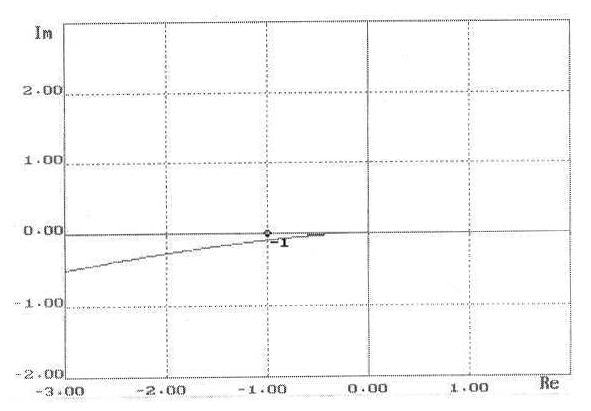

Рис.5.(лист 1)

Рис.6.(лист 2)
5. Синтез САР и расчет КУ
При синтезе исходить из того, что объект регулирования - неизменная часть, а синтезу подлежат корректирующие устройства или регулятор - изменяемая часть системы.
1. При отсутствии корректирующего устройства КУ W>ку>(s)=1 определить общий коэффициент усиления разомкнутой системы K, при котором должна обеспечиваться заданная точность >max>
Для систем с астатизмом первого порядка
 .
.
В случае неустойчивости полученной системы или ее неудовлетворительных динамических характеристик произвести расчет корректирующего устройства, используя частотный метод синтеза, основанный на построении желаемой ЛАХ L>ж>.
При формировании желаемой ЛАХ следует учитывать следующие рекомендации.
1) Вид низкочастотной области ЛАХ определяется главным образом точность работы САР. Среднечастотная область, прилегающего к частоте среза >ср >определяет в основном запас устойчивости, т.е. качество переходных процессов. Высокочастотная область лишь незначительно влияет на качество процессов управления.
2) Желаемая ЛАХ в возможно большем интервале частот должна совпадать с ЛАХ исходной нескорректированной системы L. В противном случае реализация КУ может существенно усложниться.
3) В низкочастотной области наклон желаемой ЛАХ должен составлять -20 дБ/дек, где - порядок астатизма. Желаемая ЛАХ на частоте =1 с-1 должна иметь ординату 20lgk, где K - общий коэффициент усиления разомкнутой системы (если =0, то на частоте =0).
4) Если задана допустимая ошибка >max>> >при гармоническом входном воздействии
g(t) =g> max >sin >g>t,
то желаемая ЛАХ должна располагаться выше контрольной точки A>k>, имеющей на частоте >g>> >ординату

Если задана допустимая ошибка >max> и оговорены только максимальная скорость >max> и максимальное ускорение Q>max >входного воздействия, то может быть подобрано эквивалентное гармоническое входное воздействие
 и
и
 .
.
В этом случае ордината контрольной точки
 .
.
При задании >max>, Q >max>> >может быть получена так называемая запретная зона низкочастотной части ЛАХ. Для этого нужно построить семейство контрольных точек, у которых амплитуда скорости по прежнему равна максимальному значению, а амплитуда ускорения меньше максимального наоборот, когда амплитуда ускорения равна максимальному значению, а амплитуда скорости - меньше. Семейство этих точек образует две прямые с наклоном -20дб/дек в первом и -40дб/дек во втором случае, пересекающиеся на частоте >g> (см. рис. 7).
Рис. 7.
При этом следует помнить,
что действительная (не асимптотическая)
желаемая ЛАХ проходит в точке излома
>g>
на 3 дб ниже. Поэтому для предотвращения
захода желаемой ЛАХ в запрещенную зону
ее следует приподнять над контрольной
точкой на 3 дб = 20 .
.
4) В районе частоты среза >c>> >наклон желаемой ЛАХ выбирается равным -20дб/дек, что позволяет обеспечить запас устойчивости. Чем больше протяженность участка с наклоном - 20 дб/дек, тем больше запас устойчивости, т.е. выше качество переходного процесса.
В области средних частот желаемой ЛАХ (см. рис. 8) соответствует передаточная функция
где
 .
.

Рис. 8.
Фазовая характеристика в этой области частот имеет вид
 .
.
Для того, чтобы обеспечить
заданное качество запас устойчивости
по фазе на частоте среза >c>
 должен составлять 3060,
а запас устойчивости по амплитуде,
определяемый на частоте где ()=-180,
должен составлять 610
дб.
должен составлять 3060,
а запас устойчивости по амплитуде,
определяемый на частоте где ()=-180,
должен составлять 610
дб.
 ,
,
где Tрассчитываются по формулам:
 .
.
 ;
;
 .
.
Выбираем 8,5 и T = 1,1 ;
 .
.
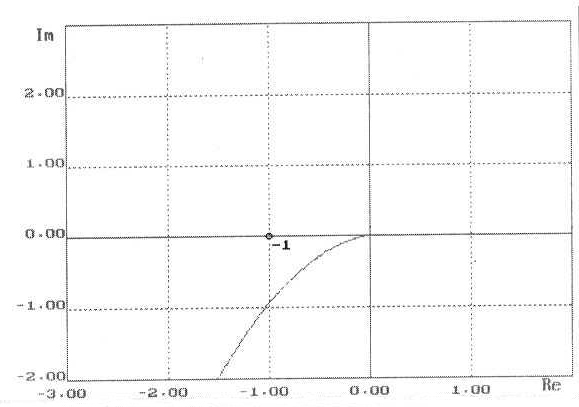

Рис.9.(лист 3)
После введения КУ проверяется путем моделирования выполнение требований по точности и качеству переходного процесса.
Проверяем систему на устойчивость и определяем ее реакцию на синусоидальное воздействие:
 ;
;
 ;
;
 ,
,
т.о.
 .
.


Рис.10.(лист 4)
Т.к. не достигается требуемая ошибка X>max> = 10 мкм, увеличиваем общий коэффициент усиления системы до k = 20. При таком коэффициенте достигается требуемая точность, запас устойчивости по фазе и по амплитуде достаточен для реализации САР.


Рис.11.(лист 5)
Литература
1. Сапаров В.Е., Максимов Н.А. Системы стандартов в электросвязи и радиоэлектронике. М.: Радио и связь, 1985. 248 с.
2. Микропроцессорные системы автоматического управления./Под ред. Бесекерского В.А. Л., Машиностроение, 1988.
3. Бесекерский В.А., Изранцев В.В. Системы автоматического управления с микроЭВМ. М., Наука, 1987.
4. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М., Наука, 1975.
5. Теория автоматического управления./Под ред. Воронова А.А. М., Высшая школа, 1986, Т.1, 2.
6. Основы автоматического регулирования и управления./Под ред. Пономарева В.М., Литвинова А.П. М., Высшая школа, 1974.
7. Сборник задач по теории автоматического регулирования и управления./Под ред. Бесекерского В.А. М., Высшая школа, 1978.