Синтез последовательного корректирующего устройства

Московский Государственный Инженерно-Физический Институт
(Технический Университет)
Факультет Кибернетики
Кафедра “Математическое Обеспечение Систем”
Курсовая работа
по Основам Теории Автоматического Управления
“Синтез последовательного корректирующего устройства”
Выполнил: Страхов Р. В.
Группа: K5-331
Принял: Беляков А. К.
Москва
Цель работы:
Синтез последовательного корректирующего устройства частотными методами;
Обеспечение отсутствия статической ошибки;
Оценка запасов устойчивости.
Вариант № 20
В качестве исходных данных задана следующая передаточная функция:
|
|
(1) |

и соответствующие параметры:

Представим исходную функцию в следующем виде:
|
|
(2) |
где Т>1 >= 0,1; Т>2 >= 0,5; k = 150.
Построим структурную схему передаточной функции:
Для замкнутой системы составим систему дифференциальных уравнений:
|
|
(3) |
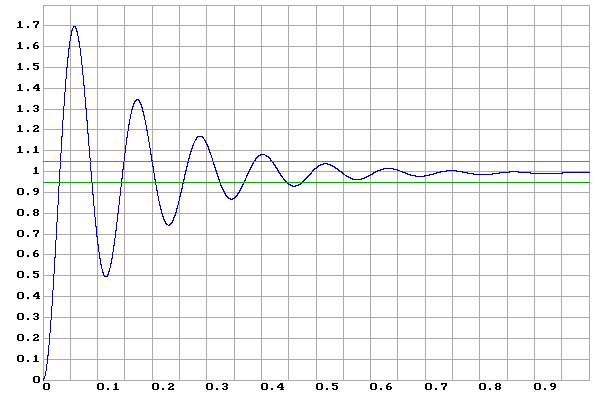
Для оценки времени регулирования t>p>>1> исходной системы по системе дифференциальных уравнений (3) построим переходный процесс:
Для построения ЛАЧХ W>ж>(S) по заданным параметрам найдены характерные частоты:
|
|
|
|
По логарифмической характеристике W>ж> определены запасы устойчивости системы по амплитуде Н>м> и по фазе >с>:
|
Н>м> = |
>с>> >= |
По построенному графику была востановлена передаточная функция корректирующего устройства:
|
|
(4) |
|||
|
T>1>’ = 3,13 |
T>2>’ = T>2> =0,5 |
T>3>’ = T>1>= 0,1 |
T>4>’ = 0,095 |
k>1> = 0,1 |

|
|
(5) |

Построим структурную схему передаточной функции W>ж>(S):
Для замкнутой системы составим систему дифференциальных уравнений:
|
|
(6) |
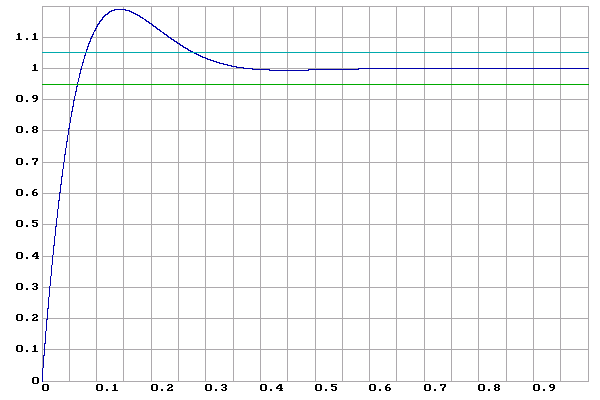
Для оценки времени регулирования t>p>>2> желаемой системы по системе дифференциальных уравнений (6) построим переходный процесс:
Заключение.
В данной работе синтезировалось последовательное корректирующее устройство с помощью частотных методов. Для этого были построены логарифмические амплитудные характеристики желаемой и неизменяемой (исходной) систем. Далее путем вычитания одного графика из другого получена логарифмическая характеристика корректирующего устройства. По ней восcтановлена передаточная функция:
|
|
(4) |
|||
|
T>1>’ = 3,13 |
T>2>’ = T>2> =0,5 |
T>3>’ = T>1>= 0,1 |
T>4>’ = 0,095 |
k>1> = 0,1 |

Полученная желаемая система с передаточной функцией
|
|
(5) |

устойчива в замкнутом состоянии, имеет запасы устойчивости по фазе и модулю >с>= и Н>м >= дБ, обеспечивающие нормальную работу системы.
Также для W>н>(S)> >и W>ж>(S)=W>к>(S)*W>н>(S)> >построены переходные процессы, по графику которых определены времена регулирования t>p1 >= 0,475с и t>p2 >= 0,275с соответственно.
Благодаря корректирующему устройству удалось уменьшить время регулирования, а наибольшее значение перерегулирования полученной системы стало >max>> >= 19% (для исходной системы >max>> >= 70%), что находится в соответствии с условием поставленной задачи.