Разработка следящей системы
Список сокращений и терминов, используемых в пояснительной записке
САУ — система автоматического управления.
ТАУ — теория автоматического управления.
ДПТ — двигатель постоянного тока.
САР — система автоматического регулирования.
СИФУ — система импульсно-фазового управления.
УВ — управляемый выпрямитель.
ОВ — обмотка возбуждения ДПТ.
КУ — корректирующее устройство.
РС, РП — регулятор скорости, регулятор положения.
ТП — тиристорный преобразователь.
ЭЧ — электрическая часть ДПТ.
ЭМЧ — электромеханическая часть ДПТ.
МЧ — механическая часть ДПТ.
Р — редуктор.
Н — нагрузка.
С — сельсины.
ДТ, ДС, ДР — датчик тока, датчик скорости, датчик рассогласования.
U>З >— напряжение задания.
U>п >— напряжение питания.
ОУ — операционный усилитель.
I>В >— ток в обмотке возбуждения ДПТ.
М>дв >— электромагнитный момент, развиваемый ДПТ.
М>с >— статический момент.
АФХ — амплитудо-фазовая характеристика.
Введение
Целью данной курсовой работы является разработка следящей системы, задачей которой является воспроизведение траектории, которая заранее не задана. К системам данного класса предъявляются требования по быстродействию и точности воспроизведения задающего сигнала.
Следящие системы применяются в приводе манипуляторов роботов, на конвейерных установках и любых других устройствах, где заранее неизвестна траектория рабочего органа.
При проектировании системы необходимо:
Построить функциональную схему;
Определить передаточные функции звеньев;
На основании функциональной схемы построить структурную схему;
Проверить систему на устойчивость, на статическую ошибку.
1. Расчетная часть
1.1 Функциональный анализ и составление функциональной схемы САР
Функционально система регулирования имеем следующий вид:

Рисунок 1.1—Функциональная схема электропривода
Задачей следящей системы является отработка задающего сигнала. В качестве сравнивающего узла используются сельсины, работающие в трансформаторном режиме. При наличии угла рассогласования между сельсином-датчиком (прикреплен к рабочему органу) и сельсином-приемником, в обмотке возбуждения приемника наводиться ЭДС, которая через датчик рассогласования подается на вход системы и является задающим сигналом для поворота сельсина-приемника двигателем. Для отработки задающего сигнала применяется двухконтурная система подчиненного регулирования.
Ниже приводится краткое описание принципа работы схемы.
Входной величиной регулятора положения является напряжение поступаемое от датчика рассогласования.
Входными сигналами регулятора скорости являются: сигнал задания скорости и отрицательный сигнал, поступающий от датчика скорости. Выходной сигнал регулятора скорости является управляющим для тиристорного преобразователя, который состоит из блока управления (СИФУ) и силовой части (УВ). Выходной величиной преобразователя является напряжение обмотки возбуждения.
С помощью изменения напряжения производится изменение электромагнитного момента ДПТ, а, следовательно, и скорости.
Двигатель через редуктор вращает рабочий орган, на котором закреплен сельсин-приемник. Тем самым уменьшается сигнал от датчика рассогласования.
Функциональная схемы состоит из следующих блоков:
Регулятор положения.
|
|
Предназначен для преобразования напряжения задания положения в выходное для управления контуром скорости ДПТ. Входная величина: U>ДР>. Выходная величина: U>УП>; Возмущения: напряжение питания ОУ; температура, изменяющая характеристики ОУ. |

Регулятор скорости.
|
|
Предназначен для преобразования напряжения задания скорости в выходное для управления тиристорным преобразователем. Входная величина: U>зс>-U>дс>; Выходная величина: U>ус>; Возмущения: напряжение питания ОУ; температура, изменяющая характеристики ОУ. |

Тиристорный преобразователь.
|
|
Предназначен для преобразования переменного трехфазного напряжения питающей сети в постоянное. Величина постоянного напряжение определяется регулятором. Входная величина: U>рс>; Выходная величина: Е>тп>; Возмущения: напряжение и частота питающей сети. |

Электрическая часть ДПТ.
|
|
Предназначена для преобразования напряжения обмотки возбуждения в ток возбуждения. Входная величина: Е>тп>; Выходная величина: I>В>; Возмущение: температура окружающей среды. |

Электромеханическая часть ДПТ.
|
|
Предназначена для преобразования тока возбуждения в момент, развиваемый двигателем. Входная величина: I>В>; Выходная величина: М>ДВ>; Возмущения: температура. |

Механическая часть ДПТ.
|
|
Предназначена для преобразования входного момента в частоту вращения якоря. Входная
величина:
Выходная
величина:
|

 М=М>дв>-М>статический>;
М=М>дв>-М>статический>; ;
;Редуктор.
|
|
Предназначен для преобразования входной частоты вращения в выходную меньшего значения. Входная
величина:
Выходная
величина:
|

 ;
; ;
;Датчик скорости.
|
|
Предназначен для преобразования скорости вращения ДПТ в напряжение, поступаемое на регулятор скорости. Входная величина: w>1>; Выходная величина: U>дс>; Возмущения: температура окружающей среды. |

Датчик положения.
|
|
Предназначен для преобразования разности углов между сельсинами в напряжение, поступаемое на регулятор положения. Входная величина: f>ДАТЧИКА>-f>ПРИЕМНИКА>; Выходная величина: U>ДР>. Возмущение: температура |

1.2 Математическое описание элементов САР и определение их передаточных функций
Тиристорный преобразователь
Тиристорный преобразователь в зависимости от возможности реверса, типа управления группами вентилей, режима работы описывается системой нелинейных дифференциальных уравнений. Его динамика, как элемента системы управления, отличается следующими особенностями:
1)преобразователь управляется не непрерывно, а дискретно;
2)преобразователь является полууправляемым устройством, поскольку тиристор открывается в момент подачи управляющего импульса, а закрывается - когда ток через него станет равен нулю.
Нелинейность тиристорного преобразователя вызывает появление низкочастотных биений при воздействии сигналов с частотой, большей частоты питающей сети, субгармонических колебаний в замкнутых системах при попытке организовать высокое быстродействие. Поэтому в целом тиристорный преобразователь, работающий в режиме непрерывного тока, с достаточной точностью можно представить одним динамическим безинерционным звеном с чистым запаздыванием, передаточная функция которого имеет вид:
 ,
,
где - общее время запаздывания;
- общее время запаздывания;
 - время запаздывания силового
преобразователя, которое принимается
равным половине максимального времени
запаздывания:
- время запаздывания силового
преобразователя, которое принимается
равным половине максимального времени
запаздывания:
= ,
,
где f>сети> – частота сети;
m>в> – число фаз выпрямления;
 - время запаздывания устройства
управления, которое принимают равным:
- время запаздывания устройства
управления, которое принимают равным:
=0,07с
для полупроводниково-емкостного
устройства;
=0
для СИФУ вертикального типа.
С достаточной точностью тиристорный преобразователь, работающий в режиме непрерывного тока, можно представить инерционным звеном
 .
.
Если блок управления тиристорами имеет на входе фильтр для защиты от высокочастотных помех, то передаточная функция тиристорного преобразователя примет вид:

Если нет данных о постоянной времени фильтра, то ее можно принять равной Т>ф>=0,0050,01 с.
Для упрощения расчетов тиристорный преобразователь можно представить инерционным звеном с передаточной функцией:

где Т>тп>=Т>ф>+>з>.
ДПТ при управлении по потоку
При рассмотрении математического описания двигателя постоянного тока принимаются допущения:
1) размагничивающее действие реакции якоря считается скомпенсированным;
2) индуктивность и сопротивление якорной цепи является постоянными величинами;
3) магнитный поток зависит линейно от намагничивающей силы.
Для построения структурной схемы запишем систему дифференциальных уравнений в операторном виде:

гдеR>в> - сопротивление обмотки возбуждения;
Т>в> - постоянная времени обмотки возбуждения;
I>в>(p)- изображение тока обмотки возбуждения;
K>1> - коэффициент пропорциональности между потоком и током возбуждения;
К>2> - конструктивная постоянная электродвигателя.
Структурная схема ДПТ представлена на рисунке 1.2.

Рисунок 1.2 – ДПТ при управлении по потоку
Редуктор.
Уравнение, описывающее редуктор:

Таким образом, структурная схема системы положения имеет вид, представленный в графической части.
1.3 Составление структурной схемы САР
Структурная схема электропривода представлена в графической части.
Входным сигналом для системы является угол поворота сельсина-датчика. Если существует разница углов между сельсинами, то в обмотке сельсина-приемника наводится ЭДС, которая фиксируется датчиком рассогласования. Сигнал от датчика рассогласования является управляющим для регулятора положения.
Выходной сигнал регулятора положения является управляющим для контура скорости. На регулятор скорости поступает разница, между сигналом регулятора положения и датчиком скорости. Выходной сигнал регулятора скорости поступает на тиристорный преобразователь, на выходе которого получаем напряжение обмотки возбуждения двигателя.
В обмотке напряжение преобразуется в ток возбуждения. Далее ток умножается на коэффициент пропорциональности между током возбуждения и моментом (ток якоря при управлении постоянен), получается момент, развиваемый на роторе. От этого момента необходимо отнять момент сопротивления. Получается избыточный момент, который в электромеханической части двигателя преобразуется в скорость ротора. Полученную скорость ротора делим на передаточное отношение редуктора, получается угловая скорость рабочего органа. Если эту скорость проинтегрировать, то получится угол поворота рабочего органа и связанного с ним сельсина-приемника.
1.4 Расчет параметров элементов САР
Рассчитаем постоянную времени тиристорного преобразователя:
Т>ТП>=Т>Ф>+t>З>=0,005+ =0,005+
=0,005+ =0,01
с
=0,01
с
Далее найдем постоянные времени двигателей:
 с
с
1.5 Выбор структуры и расчет параметров корректирующих устройств
Для расчета регуляторов определяем малую постоянную времени. Из приведенных выше расчетов видно, что постоянная времени тиристорного преобразователя меньше постоянной времени двигателя, следовательно, она и будет малой не компенсируемой постоянной времени.
Расчет регулятора скорости.
Структурная схема скорости имеет вид:

Рисунок 1.3—Контур скорости с регулятором
Передаточная функция регулятора скорости, настроенного на симметричный оптимум имеет следующий вид:
 ,
,
гдеа>С>, b>С>=2—коэффициенты демпфирования контура скорости;
Т>m>> >— малая постоянная времени;
W>ОКТ >— передаточная функция объекта компенсации контура тока.
Для определения передаточной функции объекта компенсации необходимо записать передаточную функцию разомкнутого контура скорости без учета передаточной функции регулятора скорости и малых постоянных времени. Для этого размыкаем обратную связь и получаем:

Тогда передаточная функция регулятора тока будет иметь вид:

Регулятор тока представляется в виде двух частей: ПИ и ПД регуляторов.
Расчет регулятора положения.
Для расчета регулятора положения представим контур скорости в виде звена:

Структурная схема контура положения имеет следующий вид:

Рисунок 1.4—Контур положения с регулятором
Строим ЛАЧХ разомкнутого контура положения, при этом пренебрегаем старшими степенями, т.к. коэффициенты при ним более, чем в 10 раз меньше коэффициентов при младшей степени:

Далее строим желаемую ЛАЧХ системы. Передаточная функция желаемой ЛАЧХ имеет вид:

Для нахождения регулятора, отнимаем от желаемой ЛАЧХ, ЛАЧХ разомкнутой системы. Разность логарифмов — это деление их выражений. Поэтому передаточная функция регулятора будет равна отношению желаемой передаточной функции к передаточной функции разомкнутой системы:

Первая часть — ПИ-регулятор, вторая — П.
Рисунки ЛАЧХ приведены в приложении Б.
1.6 Исследование устойчивости скорректированной САР
Для нормального функционирования система должна возвращаться в исходное состояние после прекращения действия возмущающего воздействия. Для определения устойчивости системы воспользуемся правилом Ляпунова. По этому правилу для устойчивости системы необходимо, чтобы вещественная часть корней характеристического уравнения была отрицательной. Вывод передаточной функции замкнутой системы приведен в пункте 1.7.2.
Для нахождения корней уравнения воспользуемся математическим комплексом MathCAD. «Polyroots»—корни уравнения, коэффициенты которого задаются матрицей.
|
|
Как видно корни характеристического уравнения имеют отрицательную вещественную часть. Значит система устойчива. |

Полученные в результате расчета корни имеют отрицательную действительную часть. Поэтому система является устойчивой.
1.7 Исследование установившегося режима САР
1.7.1 Выбор задающих воздействий
В следящей системе задающее воздействие заранее не известно—на то она и следящая система. Смотрите ниже по тексту в подразделе Моделирование рабочего режима САР в соответствии с индивидуальным заданием.
1.7.2 Расчет передаточных функций и статических ошибок САР
Структурная схема имеет вид:

Рисунок 1.5—Структурная схема САР
Найдем передаточную функцию прямой ветви:

Передаточная функция системы по задающему воздействию имеет вид:

Коэффициент передачи по задающему воздействию: 1.
Передаточная функция ошибки от задающего воздействия:

Передаточная функция по возмущающему воздействию. Показывает как изменяется выходная величина системы при действии на систему возмущающего воздействия. Для того, чтобы доказать, что система является астатической (хотя это видно невооруженным взглядом—в прямой цепи регулятора есть интегратор), сначала рассмотрим действие возмущения на контур скорости: если выходная величина контура скорости не изменится при действии возмущения, тогда никакого влияния на контур положения это возмущения также не окажет.

Рисунок 1.6—Структурная схема контура скорости
Итак, передаточная функция ошибки контура скорости от возмущающего воздействия имеет вид:

При «р=0» (статический режим) ошибка скорости равна нулю. Т.е. возмущающее воздействие не оказывает влияния на выходную величину контура скорости. Поэтому контур положения даже и не заметит присутствия возмущения. А значит коэффициент передачи контура положения от возмущения и ошибка контура положения от возмущения равны нулю.
1.7.3 Расчет статической механической характеристики замкнутой САР
Статическая механическая характеристика—это зависимость выходной координаты системы от возмущающего воздействия при заданном задающем воздействии. В общем виде данная характеристика представляется выражением:
 ,
,
гдеY>ВЫХ>—выходная координата системы;
U>З> и f—задающее и возмущающее воздействия;
К>Y>>З> и К>yf>—коэффициенты передачи по задающему и возмущающему воздействию.
Коэффициент передачи по возмущающему воздействию равен нулю, тогда приведенное выше выражение преобразуется в следующее:
 ,
,
а это есть уравнение прямой линии, параллельной оси Х.
Таким образом, при любом возмущающем воздействии система будет поддерживать выходную координату на заданном уровне.
2. Исследование САР в переходных режимах
2.1 Составление структурно-алгоритмической модели без учета нелинейности характеристик элементов
При составлении структурно-алгоритмической модели в структурной схеме отдельно выделяются интегрирующие звенья. На входе интегратора будет производная переменной, а на выходе само значение.
Среди всех звеньев структурной схемы выделим типовые звенья: пропорциональное, интегральное, и апериодическое. Рассмотрим преобразование типового звена в структурно-алгоритмическую форму.
Апериодическое звено.


Таким образом, структурно-алгоритмическая форма апериодического звена имеет вид:
Дифференциальное звено.
При составлении структурно-алгоритмической формы необходимо, чтобы числитель передаточной функции имел степень не больше знаменателя. Поэтому при моделировании дифференциального звена используют фильтр с малой постоянной времени, на порядок меньше, чем Т>m>.

Структурно-алгоритмическая форма имеет вид:

Пропорциональное, интегральное и пропорционально-интегральное.
Структурно-алгоритмическая форма этих звенев не отличатся от обычной структурной формы. Пропорционально-интегральное звено является комбинацией пропорционального и интегрального звеньев.
2.2 Расчет переходных характеристик по контурам
Контур скорости.
Схема модели представлена в приложении Б. По результатам моделирования, делаем вывод, что перерегулирование составляет 43%, время регулирования—16Т>m>.
Контур положения.
Схема модели представлена в приложении Б. По результатам моделирования делаем вывод, что перерегулирование составляет 21%, а время регулирования—40Т>m>.
2.3 Составление структурно-алоритмической модели с учетом нелинейностей характеристик элементов
В данном курсовом проекте согласно заданию задана нелинейность датчика тока типа «зона нечувствительности». Но в схеме нет датчика тока. Поэтому, посчитав это недочетом задания, взята нелинейность датчика скорости.
До некоторого значения входного сигнала, выходной сигнал датчика равен нулю, а далее изменяется линейно.
2.4 Расчет переходных характеристик, оценка показателей качества
Из-за того, что контур скорости имеет большое перерегулирование, то сигнал задания скорости нужно подавать через апериодическое звено. Если же этого не делать, то в переходном процессе контура положения видны колебания.
Из-за нелинейности датчика скорости в системе возникают незатухающие колебания, которые убрать невозможно, т.к. при выходе на номинальное положение скорость двигателя должна быть равна нулю, а контролировать это невозможно.
2.5 Моделирование режимов работы САР в соответствии с индивидуальным заданием
Режим работы САР следующий: через задатчик интенсивности задается угол поворота. Время выхода на номинальный режим—2 с. В момент времени 3,5 с. к системе прикладывается момент сопротивления равный номинальному моменту.
Полная модель САР и графики переходных процессов представлены в приложении Б. По результатам моделирования можно сделать выводы:
В системе присутствуют незатухающие колебания. Уменьшить их амплитуду можно только уменьшением зоны нечувствительности датчика скорости.
Момент сопротивления оказывает на систему незначительное влияние только при набросе, на статику он не влияет. Для того, чтобы это было лучше заметно приведен график без нелинейности датчика скорости. На графике с учетом нелинейности датчика на фоне автоколебаний наброс нагрузки вообще не просматривается.
2.6 Определение параметров автоколебаний
Для определения параметров автоколебаний необходимо привести систему к виду:
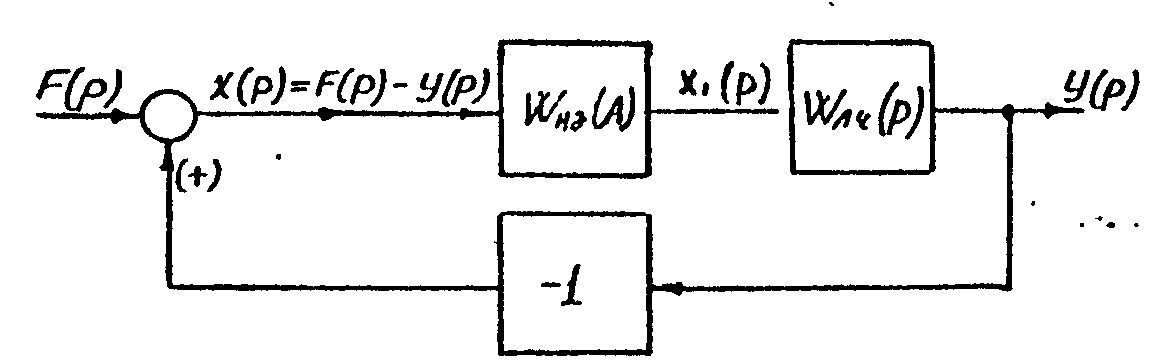
Для нахождения параметров автоколебаний необходимо построить АФХ линейной и нелинейной части. Точка пересечения даст параметры автоколебаний.
АФХ нелинейной части.
«Зона нечувствительности» датчика скорости представляет собой нелинейность, симметричную относительно начала координат. Поэтому комплексный коэффициент усиления не будет содержать мнимой части. АФХ будет проходить по действительной оси от минус бесконечности до минус единицы.
АФХ линейной части.
Для нахождения передаточной функции преобразуем схему:
Перенесем обратную связь по положению так, чтобы она стала параллельна обратной связи по скорости.
Всё, что не охвачено этими связями—отбрасываем.
Находим передаточную функцию линейной части.
В итоге получим:



Для нахождения АФХ нужно «р» заменить на jw.

Выделим действительную и мнимую часть.

Для построения АФХ воспользуемся программой MathCAD:

Видно, что АФХ линейной части пересекает ось Х на интервале [минус бесконечность; -1]. Значит в системе есть автоколебания. Приблизительная частота—28,5 рад/с. При этом вещественная часть по модулю равна «33». Такое же значение имеет вещественная часть АФХ нелинейного элемента (т.к. в точке пересечения они равны).
Комплексный коэффициент усиления нелинейного элемента не содержит мнимой части и имеет вид:

Из этого уравнения выражаем А=0,5.
Заключение
В результате проделанной работы была спроектирована двухконтурная система управления положением.
При моделировании рабочего режима были получены следующие результаты:
перерегулирование — 3% (без учета автоколебаний, амплитуда которых для данного режима — 8,3%);
время выхода на номинальный режим—1,95 секунды;
система работает с астатизмом первого порядка, т.е. при постоянного момента сопротивления положение рабочего органа равно заданному углу поворота.
П риложение
А—Функциональная и структурная схемы
электропривода
риложение
А—Функциональная и структурная схемы
электропривода
Структурная схема электропривода:

Функциональная схема:
Приложение Б — Листинги программ, таблицы результатов и графики
Модели
Исходные данные для моделей:
|
Pnom=2200; Ianom=12.2; c=1.27; Rd=358; Ld=57.5; Jd=0.026; Ktp=24; m=2; Ttp=0.005+1/(2*50*m); Jm=0.025; ir=12; Mnom=Ianom*c; Idnom=10*Ktp/Rd; k=Mnom/Idnom; J=Jd+Jm; Uzp=3; Uzs=5; Td=Ld/Rd; Tmu=Ttp; wnom=Pnom/Mnom; Kds=Uzs/wnom; KdsN=wnom*Kds*0.2; Kdr=2.5; Trs=2*Tmu*Ktp*k*Kds/Rd; Krsd=Td*J/Trs; Krsp=J/Trs; Trsi=4*Tmu; Krp=ir*Kds/(8*Tmu*Kdr); Trpi=16*Tmu; |
Номинальная мощность двигателя. Номинальный ток якоря. Конструктивный коэффициент «кФ». Сопротивление обмотки возбуждения. Индуктивность её же. Момент инерции двигателя. Коэффициент передачи тиристорного преобразователя. Число пульс выпрямителя. Постоянная времени выпрямителя. Приведенный момент инерции механизма. Передаточное число редуктора. Номинальный момент двигателя. Номинальный ток возбуждения Коэффициент пропорциональности между током возбуждения и моментом двигателя. Момент инерции привода. Напряжение задания положения. Напряжение задания скорости. Постоянная времени цепи возбуждения. (Т>В>) Малая постоянная времени. (Т>m>) Номинальная скорость двигателей. Коэффициент передачи датчика скорости. Зона нечувствительности датчика скорости. Коэффициент передачи датчика рассогласования. Знаменатель регулятора скорости. Дифференциальная часть РС. Пропорциональная часть РС. Постоянная времени ПИ-части регулятора скорости Коэффициент передачи пропорциональной части РП. Постоянная времени ПИ-части регулятора положения. |
Контур скорости:

Контур положения:

Контур положения с нелинейностью датчика скорости:

Графики переходных процессов




