Блок керування для блока первинного центрування зображення
Міністерство освіти і науки України
Вінницький національний технічний університет
Інститут автоматики, електроніки та комп’ютерних систем управління
Кафедра лазерної та оптоелектронної техніки
БЛОК КЕРУВАННЯ ДЛЯ БЛОКА ПЕРВИННОГО ЦЕНТРУВАННЯ ЗОБРАЖЕННЯ
Пояснювальна записка з дисципліни
"Цифрові пристрої та мікропроцесори"
до курсового проекта за спеціальністю
"Лазерна і оптоелектронна техніка"
08-04.ЦПМП.000.00.000 ПЗ
Вінниця ВНТУ 2009
Міністерство освіти і науки України
Вінницький національний технічний університет
Кафедра лазерної та оптоелектронної техніки
ЗАТВЕРДЖУЮ
Зав. каф. ФЕЛТ, д.т.н., проф.
ІНДИВІДУАЛЬНЕ ЗАВДАННЯ
на курсовий проект з дисципліни "Цифрові пристрої та мікропроцесори"
Тема: Блок керування для блока первинного центрування зображення
Зміст графічної частини:
Блок-схема алгоритму розпізнавання (формат А4)
Блок-схема алгоритму блока первиного центрування зображення (формат А4)
Синтезована блок – схема алгоритму (формат А4)
Схема електрична структурна (формат А4)
Функціональна схема (формат А4)
Схема електрична принципова (формат А4)
Зміст пояснювальної записки:
Вступ, Аналіз та інженерна інтерпретація технічного завдання, Розробка структурної схеми, Розробка схеми_електричної принципової, Розробка програмного забезпечення, Висновки,Література.
ТЕХНІЧНЕ ЗАВДАННЯ
На розробку пристрою: Блок керування для блока первинного центрування зображення
1. Область застосування приладу: в пристроях автоматики, а також в цифрових обчислювальних машинах.
2. Основа для розробки – робочий навчальний план дисципліни "Цифрові пристрої та мікропроцесори".
3. Мета та призначення розробки: а) мета розробки – отримання практичних навичок розробки приладів на основі цифрових пристроїв та мікропроцесорів; б) призначення розробки – навчальний курсовий проект з дисципліни ЦПМП.
4. Джерела розробки – індивідуальне завдання на курсовий проект
5. Технічні вимоги
Вступ
Теоретичні основи, методи та алгоритми розпізнавання досить розповсюджені для вирішення різноманітних задач автоматизації виробництва, в тому числі, і в технологічних роботизованих комплексах.
Цифрова обробка зображень набуває великого значення в багатьох областях діяльності людини в даний час. Дійсно, зображення як форма найбільш повного представлення інформації не тільки не можливо замінити, наприклад, в такому винятковому випадку, як дослідження поверхні тієї або іншої планети, але і в буденному житті. Воно є об'єктом дослідження або його результатом в космонавтиці, астрономії, біології, медицині, фізиці, геології, криміналістиці і дефектоскопії.
Зображення можна отримати не лише в діапазоні частот електромагнітного випромінювання, що відповідає видимому світлу, але і в діапазоні частот акустичному, інфрачервоному, ультразвуковому, ультрафіолетовому, рентгенівських і гамма-променів. Засоби їх формування і реєстрації відрізняються великою різноманітністю (фото- і оптико-електронні сканери, радіолокаційні і лазерні пристрої). З їх допомогою можна, наприклад, отримати на Венері зображення її поверхні або представити у видимій формі людську мову.
Техніка передачі зображень досягла на даний час високого рівня. Для передачі зображень використовується оптична, дротяна, радіо і інші види зв'язку. Теоретично і експериментально доведена можливість високоякісної передачі відеоінформації на відстані в декілька десятків і навіть сотень мільйонів кілометрів. Технічно здійсненною представляється в даний час і завдання створення глобальної системи зв'язку для передачі зображень [1].
Висока ступінь вірогідності розпізнання, перш за все, залежить від правильної організації тісно пов’язаних між собою систем відчуття та інтелектуалізації управління.
Отже, при розробці гнучких робототизованих комплексів ставлять за мету створення ефективних сенсорних систем та алгоритмів обробки інформації. Інформацію, необхідну для виконання цього завдання, забезпечує система відчуття – найголовніша підсистема адаптивного робота, джерелом інформації для якої служить система технічного зору (СТЗ).
У зв’язку з тим, що СТЗ забезпечують найбільш високу інформативність щодо сприйняття, аналізу та обробки зображень, область застосування таких систем досить широка: автоматизація операцій збирання, візуального контролю, дефектоскопія деталей, вузлів тощо [2-4].
Аналіз теми і інтерпретація технічного завдання
Визначальним фактором для виконання функцій СТЗ у реальному часі є ознаки, за якими виконується ідентифікація об'єктів, що здебільшого пов’язано з необхідністю виконання великого обсягу машинних процедур, в тому числі, наявності в ЕОМ великого обсягу оперативної та інших видів пам’яті.
Перспективними в СТЗ для промислових роботів є різні алгоритми, які дозволяють створювати еталони на етапі навчання для певних положень об’єкта або особливостей (симетрії) самого об’єкта. В якості еталонів можуть бути не лише окремі ознаки, а шаблони зображень, для ідентифікації яких виконують накладення зображення на еталон. У загальному вигляді процедура складається з об'єднання результатів аналізу зображень або їх геометричних особливостей [1-5].
В даній роботі увага приділена особливостям розпізнавання симетричних об'єктів за моментними ознаками з формуванням еталонів об'єктів [6-9]. Сам процес формування результуючих сигналів класифікації вхідних зображень об'єктів передбачає такі етапи розпізнавання (рис. 1).
Відомо, що підхід до вибору математичної моделі зображення передбачає спосіб опису зображення, при цьому наскільки універсальним є спосіб опису зображення, настільки простішим буде виділення системи ознак, які містять інформацію про зображення [8, 10-13]. Джерелом інформації поля зору СТЗ служить світловий потік, який в даному разі описується функцією яскравості. Отже, на виході системи формування зображень утворюється відеосигнал, що відповідає яскравості об’єкта, який знаходиться в полі зору. Тому функцією такої "інтелектуалізації" є об’єднання процедур обробки зображень оптичними блоками та формування відповідних сигналів блоком керування з врахуванням певних особливостей (симетрії) зображень [14,15].
Первинне центрування дозволяє визначити центр тяжіння об’єкта

Рисунок. 1 - Етапи розпізнавання
Тому, в даному курсовому проекті буде проведена оптимізація пристрою керування для системи розпізнавання зображень за його геометричними ознаками із виділенням симетричності зображень об’єктів.
2. Розробка структурної схеми розпізнавання зображень
Розроблена структурна схема системи розпізнавання зображень наведена у Додатку А.
Система, яка реалізує формування еталонів симетричних зображень у пpoцeci розпізнавання останніх, складається з оптичного блока обробки (БО), який містить перший блок зсуву (центрування) з проектувальною оптикою, блок повороту зображення, другий блок зсуву, два канали обробки зображень, кожен з яких містить мультиплікатор світлового потоку, формувач сигналів статичних моментів, i блока керування.
Робота системи починається з подання сигналу "Запуск" на блок керування, в який по відповідним шинам записуються вхідні величини: N - кількість стовпців; М — кількість рядків зсуву зображення; L - число поворотів зображень; К - число комплектів масок. Блок керування на відповідному виході формує спочатку адреси у блоках зміни комплектів тіньових масок, що відповідають визначенню та зрівноважуванню статичних моментів першого порядку. Після завершення первинного центрування у двох формувачах для здійснення повторних центрувань блоком керування будуть сформовані конкретні адреси комплектів масок, які однозначно відповідають визначенню та зрівноважуванню статичних моментів більш високих порядків.
Система дозволяє обробляти бінарні й напівтонові зображення, для яких градації яскравості вхідного зображення мають центральну симетрію (якщо розпізнається центральносиметричне зображення) або осьову (зображення з осьовою симетрією). Первинне та повторне центрування можуть виконуватися оптичною системою першого блока зсуву з можливістю керованого зсуву за двома напрямками (двовимірні регістри зсуву) або за допомогою акустооптичних пристроїв (двокоординатний акустооптичний пристрій відхилення). Якщо нociєм інформації про зображення є об'єктив або рефлектор, то можна застосовувати акустооптичні рефлектори або пристрої для керування сигналом зсуву [16].
Оптичні зв'язки між блоками системи (між першим блоком зсуву з проекціювальною оптикою, блоком повороту зображення, другим блоком зсуву, між виходами мультиплікатора, блоком зміни масок i оптичних перетворювачів) можуть забезпечуватися безпосереднім оптичним з'єднанням та узгодженням їx входів або ж за допомогою волоконно-оптичних каналів зв'язку чи волоконно-оптичних джгутів [17,18].
Отже, блок керування розділений на два функціонально-самостійні пристрої МПК та aналізатоp, що дає можливість кожний з цих пристроїв синтезувати окремо з орієнтацією на перспективну елементну базу - ПЛІС.
2.1 Розробка блоку керування
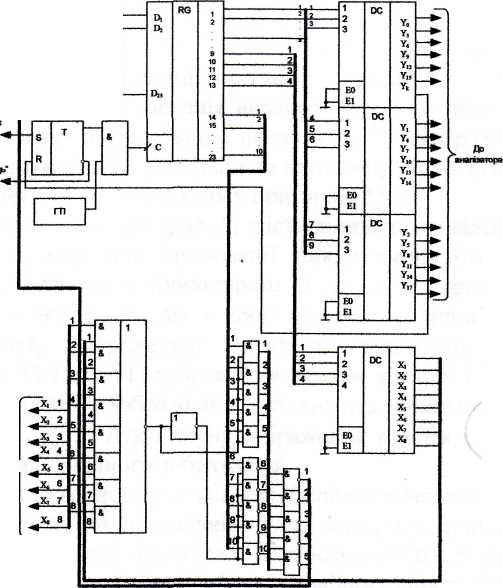
Розроблена схема електрична-функціональна блоку керування наведена у Додатку Б.
Особливістю блока керування для даної системи є можливість виконання ним не тільки функцій керування, але й попередньої обробки інформацій про вхідний відеосигнал, в результаті чого формуються ознаки симетричності зображення.
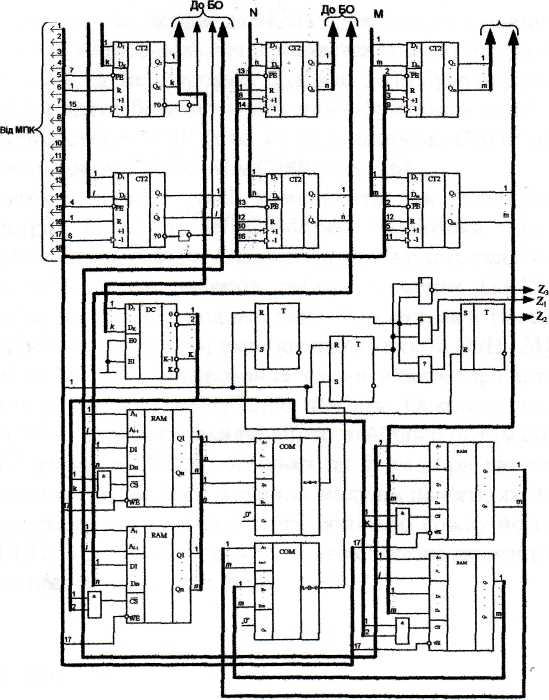
Блок керування складається з двох частин: мікропрограмного пристрою керування МПК та аналізатора симетричності об'єктів. До складу МПК входять такі базові вузли: програмоване ПЗП ROM, регістр RG, дешифратори DC, генератор тактових імпульсів ГТІ, тригер Т i логічні елементи. Аналізатор містить шість лічильників СТ, дешифратор DC, чотири мікросхеми ОЗП RAM, два компаратори СОМ, три тригери Т i логічні елементи. Розділення структури блока керування на два функцюнально-самостійних пристрої, МПК й аналізатор, зумовлене не тільки специфікою використання у СТЗ, але й необхідністю перепрограмування блока керування в процeсі розширення функціональних можливостей системи розпізнавання. Структура та методика синтезу МПК загальновідомі [19,20].
2.2 Розробка схеми електричної-функціональної аналізатора симетричності об'єктів
Розроблена схема електрична-функціональна аналізатора симетричності об'єктів наведена у Додатку В.
В аналізаторі симетричності об'єктів шість лічильників задіяні таким
чином: один з лічильників використовується для організації циклу зміни i-гo комплекту тіньових бінарних масок; другий лічильник є лічильником кількості поворотів, в якому початково записується величина L = 90/∆φ, де ∆φ - крок повороту, i який використовується для організації циклу повороту зображення; третій та четвертий лічильники фіксують координати точки відліку А1 (XI, Y1) зображення вздовж осей X i Y відповідно в процесі первинного центрування вхідного зображення; останні два лічильники фіксують величини ∆xl, ∆х2,... ∆хk-1, та ∆yl, ∆у2,... ∆уk-1 зсуву зображення вздовж осей X i Y в1дповідно в процесі повторних центрувань вхідного зображення.
Чотири схеми ОЗП RAM використовуються для зберігання величини зсуву вздовж осей X i Y відповідно до комплекту масок при певних кутах повороту, причому, адреса комплекту масок використовується для вибору необхідної мікросхеми ОЗП, а адреса кута повороту є адресою, за якою записується певна інформація з відповідних лічильників в ОЗП.
Вихідними сигналами для аналізатора є результуючі сигнали Z1,72, Z3:
одиничне значення сигналу Z1 свідчить про центральну симетрію зображення;
одиничне значення сигналу Z2 свідчить про осьову симетрію зображення;
одиничне значення сигналу Z3 фіксує несиметричність зображення.
Структура аналізатора містить такі компоненти, як дешифратори,
лічильники та запам'ятовуючі пристрої. Більшість ПЛІС містить бібліотеки таких макроелементів, що значно скорочує час їx програмування. Але основну складність реалізації схеми аналізатора в елементному базисі ПЛІС представляють собою елементи ОЗП, тому доцільно схему аналізатора поділити на дві частини: одна з яких складається з таких базових елементів, як дешифратори та лічильники, а інша - зі схем компараторів та ОЗП [24].
3. Розробка алгоритмічної частини розпізнавання зображення
3.1 Розробка загального алгоритму розпізнавання
Для обробки вхідного відеосигналу з подальшим формуванням еталонів попередньо здійснюють первинне та повторні центрування за моментними ознаками, які реалізовані за допомогою способу розпізнавання симетричних зображень об'єктів, блок-схема алгоритму якого показана на додатку Д. Процедура, що подається в кожній операторній вершині даної блок-схеми, відповідає макрооперації, реалізованій у системі розпізнавання [14,15].
У даному курсовому проекті буде розроблятись блок первинного центрування зображення.
Первинне центрування дозволяє визначити центр тяжіння об’єкта.
Введене зображення об'єкта з вхідною орієнтацією (оператор 1) формується у вигляді світлового потоку. Світловий потік розмножується й розділяється на два рівних потоки (оператор 2) та обробляється у двох каналах. Для цього кожен з мультиплікованих світлових потоків пропускають через тіньові бінарні маски, що дозволяє здійснити просторову модуляцію зображення (оператор 3). Модуляція здійснюється за допомогою комплекту тіньових масок, що сприяють виконанню первинного центрування (оператор 4), тобто визначенню зважених сум інтенсивностей зображення і їхньому порівнянню (оператор 5). При рівності зважених сум інтенсивностей зображення (оператор 7), фіксується певна інформація, що відповідає тому чи іншому еталону класу симетрії. В протилежному випадку здійснюється зсув зображення (оператор 6) з виявленням додаткових ознак для формування певного еталону симетричного зображення.
3.2 Розробка прошивки ПЗП
Закодуємо умовні вершини блок – схеми алгоритму блока первинного центрування зображення (Додаток Б).
У додатку В представлено закодовану блок – схему алгоритму блока первинного центрування зображення, де Y- мікрооперації керуючих сигналів, Х- умовні вершини. Робимо таблиці кодувальних мікрооперацій в залежності від їх розташування в під полях.
Таблиця 4.1
-
Двійковий код
Y1
Y2
Y 3
0001
y0
y1
y2
0010
y3
y6
y7
0011
y4
y5
y8
0100
y9
y17
y15
0101
F
Складемо прошивку ПЗП. Прошивка ПЗП – це послідовність мікрокоманд, яка має виконуватись починаючи від початку до кінця роботи алгоритму.
Таблиця 4.2
-
немає Х
0000
X1
0001
Х2
0010
Х3
0011
Х4
0100
Х5
0101
Х6
0110
Х7
0111
Х8
1000
Таблиця 4.3
-
Адреса
Y1
Y2
Y3
Х
А0
А1
00000
0001
0000
0000
0000
0001
0001
00001
0010
0001
0001
0000
0010
0010
00010
0000
0000
0000
0001
0010
0011
00011
0000
0000
0000
0010
0011
0100
00100
0000
0000
0000
0011
1001
0101
00101
0000
0000
0000
0100
0110
1100
00110
0000
0000
0000
0110
1000
0111
00111
0000
0000
0010
0000
0101
0101
01000
0000
0010
0000
0000
01010
0101
01001
0000
0000
0000
0101
1011
1010
01010
0011
0000
0000
0000
0100
0100
01011
0000
0011
0000
0000
0100
0100
01100
0100
0000
0011
0000
1101
1101
01101
0000
0000
0000
0111
10001
1110
01110
0000
0100
0000
0000
1111
1111
01111
0000
0000
1000
0000
10000
10000
10000
0000
0000
0000
1000
1110
10001
10001
0101
0000
0000
0000
0000
0000
Висновки
В даному курсовому проекті було розроблено блок керування для блока первинного центрування зображення. Було докладно розглянуто сучасний стан питання у даній області техніки, принцип дії як всього пристрою, так і його окремих структурних блоків. Розглянуто структурну організацію пристрою, проаналізовано можливу реалізацію структурних блоків.
Особливістю структурної організації блока керування для запропонованої системи розпізнавання зображень, який виконує не лише функцію керування, а також попередню обробку зображень, зумовлює розділення його на два функціонально-самостійні пристрої: мікропрограм ний пристрій керування та аналізатор, які, в свою чергу, достатньо вдало можна реалізувати на перспективний елементній базі - програмованих логічних IС (ГОПС).
Також було подано докладний алгоритм роботи розпізнавання зображення.
Література
Анисимов Б.В., Курганов В.Д., Злобин В.К. Распознавание и цифровая обработка изображений. – М.: Высшая школа, 1983. – 295 с.
Куафе Ф. Взаимодействие робота с внешней средой: Пер. с франц. - М.: Мир, 1985. – 285 с.
Путятин Е.П., Аверин С.И. Обработка изображений в робототехнике. – М.: Машиностроение, 1990. – 318 с.
Генкин В.Л., Ерош И.Л., Москалев Э.С. Системы распознавания автоматизированных производств. – Л.: Машиностроение. Ленинградское отделение, 1988. – 246 с.
Системы очувствления и адаптивные промышленные роботы / Под общей ред. Е.П. Попова и В.В. Клюева. – М.: Машиностроение, 1985. – 256 с.
Буда А.Г.. Мартынюк Т.Б., Лищинская Л.Б. Структурный переход от исходных признаков к результативным на этапах предварительной обработки изображений // Науково-технічна конференція "Приладобудування-96". Ч.1. – Винница-Судак, 1996. – С. 127.
Буда А.Г., Мартынюк Т. Б. Конструирование моментных признаков на этапах распознавания классов и подклассов изображений // 3-я Українська конф. з автоматичного керування "Автоматика-96". – Севастополь: СевГТУ, 1996. – С. 156-157.
Буда А.Г. Розробка моделей та дослідження прикладних методів обробки геометричних зображень на підставі моментних характеристик: Автореферат дис... канд. тех. наук: 05.13.16 / Вінниц. політехн. ін-т. – Вінниця, 1993. – 23 с.
Буда А.Г., Мартинюк Т.Б., Кожем’яко А.В. Створення еталонів класів та підкласів зображень на підставі моментних ознак // Праці Третьої Всеукраїнської міжнародної конференції "УкрОБРАЗ-96". – Київ, 1996. – С. 79-81.
Buda A., Martyniuk T., Buda S. Methods of representation of the symmetric images in devices of recognition, in Selected Paper from the International Conference on Optoelectronic Information Technologies, Proceeding of SPIE/ Vol. 4425 (2001), pp. 70-75.
Буда А.Г., Мартинюк Т.Б., Кормановський С.І., Король О.В. Базис геометричних ознак зображень та особливості їх застосування // Матеріали МНПК "Сучасні проблеми геометричного моделювання". – Львів, 2003. – С. 162-166.
Буда А.Г., Мартинюк Т.Б. Ознаковий простір моментних характеристик при розпізнаванні класів і підкласів симетричних зображень//Вісник ВПІ – 2007. – №1 – С. 61-66.
Буда А.Г., Мартинюк Т.Б., Король О.В. Створення множини ознак при аналізі правильних зображень // Праці Восьмої Всеукраїнської міжнародної конференції "УкрОБРАЗ-2006". – Київ, 2006. – С.111-113.
Патент України №3741, кл. G06К9/58, G06К9/52 Спосіб розпізнавання симетричності зображень об’єктів і пристрій для його реалізації/ В. П. Кожем’яко, В.Г. Красиленко, Т.Б. Мартинюк, А.Г. Буда. – №93321261; Заявлено 16.03.93; Опубл. 27.12.94, Бюл. № 6-1. – 35 с.
Патент України 52678, кл. G06К9/00, G06К9/58, G06К9/52. Пристрій для розпізнавання симетричності зображень об’єктів/А.Г. Буда, Т.Б. Мартинюк, А.В. Кожем’яко, В.І. Андрущенко. – № 99021033; Заявлено 23.02.99; Опубл. 15.01.2003, Бюл. № 1.–32с.
Семенов А.С., Смирнов В.Л., Шмалько А.В. Интегральная оптика для систем передачи и обработки информации. – М.: Радио и связь, 1990. – 224 с.
Волоконно-оптические системы передачи информации и кабели : Справочник / И.И. Гроднев и др. – М.: Радио и связь, 1993. – 246 с.
Кожем’яко В.П., Павлов С.В., Мартинюк Т.Б., Лисенко Г.Л. Волоконно-оптичні структури комутації та передачі інформації. Навч. посібник. – Вінниця: ВДТУ, 2002. – 106 с.
Каган В.М. Электронные вычислительные машины и системы: Учеб. пособие для вузов. – М.: Энергоатомиздат, 1991. – 592 с.
Апраксин Ю.К. Теория и проектирование ЭВМ. Синтез управляющих автоматов: Учебное пособие. – К.: ІСДО, 1993. – 80 с.
Баранов С.И. Синтез микропрограммных автоматов – Л.: Энергия, 1979.
Арсеньев Ю.Н., Журавлев В.М. Проектирование систем логического управления на микропроцессорных средствах: Учебное пособие. – М. : Высшая школа, 1991. - 319 с.
Мартынюк Т.Б., Кожемяко А.В., Вербицкий И.А, Фофанова Н.В. Реализация анализатора симметричности зображений в элементном базисе ПЛИС FLEX 10K // Вимірювальна та обчислювальна техніка в технологічних процесах: Збірник наукових праць. – Хмельницький:ТУП, 2001. – Вип. №8 (2001) –С.55-58.
Буда А.Г., Мартынюк Т.Б., Лысенко Г.Л. Техническая реализация признаков, полученных на основе исследования функциональных характеристик // Оптико-електронні інформаційно-енергетичні технології. – 2002. – № 2(4).– С. 71-77.
Мартинюк Т.Б., Фофанова Н.В., Шеляков О.Л. Реалізація блока керування на R-автоматі в елементному базисі ПЛІС//Вісник ВПІ. – 2002.- №2. – С.51-55.
Лисенко Г.Л., Мартинюк Т.Б., Фофанова Н.В. Особливості реалізації в елементному базисі ПЛІС мікропрограмних R- автоматів // Вісник ЖІТІ. Спецвипуск. – 2002. – С. 203-206.
Буда А.Г., Мартынюк Т.Б., Буда С.А. Методы представления симметричных изображений в устройстве распознавания // Збірник тез доповідей МНТК "Оптоелектронні інформаційні технології. Photonics – ODS2000". – Вінниця: "Універсум-Вінниця", 2000. – С. 37-39.
Буда А.Г., Мартынюк Т.Б., Король О.В. Алгоритм сжатия изображения и его классификационные признаки // Збірник наукових праць "Геометричне та комп’ютерне моделювання". Вип. 8. Харківський державний универсистет харчування та торгівлі. – Харків, 2005. – С. 205-210.
Буда А.Г., Мартинюк Т.Б., Лисенко Г.Л., Король О.В., Буда С.А. Математичні моделі аналізу контурів плоских симетричних зображень // Праці П’ятої Всеукраїнської міжнародної конференції "УкрОБРАЗ-2000". – Київ, 2000. – С.221-222.
Буда А.Г., Мартинюк Т.Б. Король О.В. Створення модифікації математичної моделі на підставі геометричних моментів // Материалы Второй украинско-российской научно-практической конференции "Современные проблемы геометрического моделирования". – Харьков, 2007. – С. 205-210.
ДОДАТКИ
Додаток А
Структурна схема системи розпізнавання
Додаток Б
Мікропрограмний пристрій керування
Додаток В
Аналізатор симетричності об'єктів
Додаток Г
Блок-схема алгоритму розпізнавання