Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
«ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
Факультет І Кафедра «Системи та процеси
управління»
Спеціальність 7.080202 «Прикладна математика»
ДИПЛОМНА РОБОТА
На одержання кваліфікації інженера-математика
Тема роботи: Розробка алгоритмів контролю та діагностики системи управління
орієнтацією космічного аппарату
Завідуючий кафедрою Голоскоков Є.Г.
Керівник дипломної роботи Кузнецов Ю. О.
Консультанти:
Економічна частина Чекалiна Е.П
Охорона праці та
навколишнього середовища Березуцький В.В.
Цивільна оборона Гуренко І.В.
Нормоконтроль Назаров А.С.
Студент-дипломник Уханов Є.В.
Номер академічної групи І-29
Харків 2005
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
«ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
Факультет І Кафедра «Системи та процеси
управління»
Спеціальність 7.080202 «Прикладна математика»
ЗАВДАННЯ
На виконання дипломної роботи
Студенту групи І-29 Уханову Євгенію Валерійовичу
Тема роботи: Розробка алгоритмів контролю та діагностики системи управління
орієнтацією космічного аппарату
Затверджено наказом по НТУ «ХПІ» від «___» __________ 200__ р. №_______
Термін здачі студентом закінченої роботи «___» __________ 200__ р.
Вихідні дані до роботи: 1) ГОСТ 4401-73 Стандартная атмосфераю Параметры. Издательство стандартов, 1973. 2) Киреев Н.Г. Аппроксимация и идентификация в задачах динамики полета и управления – К.:НМК ВО, 1992.-196 с. 3) Голоскоков Е.Г., Плаксий Ю.А., Фролов Ю.А. Вопросы приложения методов дифференциальной аппроксимации. – Рук. деп в ВИНИТИ 21.08.81, №4085-81, 19 с.
Розробити документи:
1. Текстові а) аналітичний огляд існуючих моделей; б) обробка теоретичного матеріалу з питань апроксимації; в) побудування моделей різного порядку;
г) аналіз побудованих моделей; д) надання рекомендацій щодо використання побудованих моделей.
2. Графічні: плакати – 5 штук.
Консультанти
|
Розділ |
Консультанти |
Підпис, дата |
|
|
Завдання видав |
Завдання прийняв |
||
|
Економічна частина |
Доц.. Чекаліна Е.П. |
||
|
Охорона праці та навколишнього середовища |
Доц. Березуцький В.В. |
||
|
Цивільна оборона |
Ас. Гуренко І.В. |
КАЛЕНДАРНИЙ ПЛАН
|
Етап |
Найменування |
Термін виконання етапів роьоти |
|
1 |
Підбір та проробка наукової лутератури |
01.11.2004 |
|
2 |
Аналітичне дослідження проблеми |
10.11.2004 |
|
3 |
Написання оглядової частини випускної роботи |
15.11.2004 |
|
4 |
Побудування математичної моделі |
25.11.2004 |
|
5 |
Написання прикладної програми |
10.12.2004 |
|
6 |
Відлагодження програми |
12.12.2004 |
|
7 |
Проведення чисельного експерименту |
15.12.2004 |
|
8 |
Аналіз результатів |
12.01.2005 |
|
9 |
Написання тексту пояснювальної записки |
31.01.2005 |
Студент-дипломник Уханов Є.В.
Керівник проекту Кузнецов Ю.О.
РЕФЕРАТ
Объем записки 169 с, иллюстраций 71, таблиц 18, ссылок 37.
Рассматривается задача построение ориентации упругого космического аппарата с учетом моментов внешних сил, возможности отказов командных приборов, таких как гироскопический измеритель вектора угловой скорости и исполнительных органов, таких как двигатели стабилизации большой и малой тяги.
Цель работы: разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата.
Разработаны алгоритмы построения ориентации упругого космического аппарата, алгоритм стабилизации реактивных двигателей системы управления космического аппарата, алгоритм идентификации отказов двигателей стабилизации. Разработана модель упругого космического аппарата с учетом аэродинамического и гравитационного момента. В законе управления введена возможность гашения шумов, с использованием гистерезиса или паузы по времени, как для двигателей большой тяги, так и для двигателей малой тяги. Для моделирования отказов одного из двигателей стабилизации разработан и внедрен в алгоритм контроля – алгоритм неполной тяги. Разработана математическая модель гироскопического измерителя вектора угловой скорости и алгоритм контроля чувствительных элементов датчика.
На базе разработанных алгоритмов и принятой модели космического аппарата, разработан программный комплекс, с применением среды визуального программирования DELPHI 7 и CAD системы визуального моделирования VisSim 5, позволяющие в полной мере моделировать сложные физические процессы с учетом всех параметров как для упругой модели, так и для абсолютно твердого тела.
Проведенное моделирование показало высокую эффективность разработанных алгоритмов, что позволяет их применять на практике.
Список ключевых слов: СИСТЕМА УПРАВЛЕНИЯ, КОСМИЧЕСКИЙ АППАРАТ, ЗАКОН УПРАВЛЕНИЯ, АЛГОРИТМ КОНТРОЛЯ.
РЕФЕРАТ
Об’єм записки 169 с, ілюстрацій 71, таблиць 18, посилань 37.
Розглядається задача побудови орієнтації пружного космічного апарату х урахуванням моментів зовнішніх сил, можливості відмови командних приборів, таких я к гироскопічни1й вимірювач вектору кутової швидкості та виконавчих органів, таких як двигуни стабілізації великої та малої потуги.
Мета роботи: розробка алгоритмів діагностики та контролю системи управління орієнтацією космічного апарату.
Розроблені алгоритми побудови орієнтації пружного космічного апарату, алгоритм стабілізації реактивних двигунів системи управління космічного апарату, алгоритм ідентифікації відмов двигунів стабілізації. Розроблена модель пружного космічного апарату з урахуванням аеродинамічного та гравітаційного моментів. У законі управління введена можливість гасіння шумів, з використанням гістерезиса або паузи по часу, як для двигунів великої потуги, так і для двигунів малої потуги. Для моделювання відмов одного з двигунів стабілізації розроблено та впроваджено в алгоритм контролю – алгоритм неповної потуги. Розроблена математична модель гіроскопічного вимірювача вектора кутової швидкості та алгоритм контролю чутливих елементів датчика.
На базі розроблених алгоритмів та прийнятої моделі космічного апарату, розроблено програмний комплекс з використанням середовища візуального програмування DELPHI 7 та CAD системи візуального моделювання VisSim 5, які дозволяють у повному обсязі моделювати складні фізичні процеси з урахуванням усіх параметрів як для пружної моделі так і для абсолютно твердого тіла.
Проведене модулювання показало високу ефективність розроблених алгоритмів, що дозволяє їх використовувати на практиці.
Список ключових слів: СИСТЕМА УПРАВЛІННЯ, КОСМІЧНИЙ АПАРАТ, ЗАКОН УПРАВЛІННЯ, АЛГОРИТМ КОНТРОЛЮ.
THE ABSTRACT
Volume 169 pages, case histories 71, tables 18, references 37.
The problem constructing of attitude of an elastic space vehicle with allowance for of moments of external forces, possibility of failures of command instruments, such as a gyroscopic meter of angular-velocity vector and cutting heads, such as motor engines of stabilizing large and low-thrust is esteemed.
The purpose of operation: mining of check algorithms and diagnostic of the attitude control system of a space vehicle.
The algorithms of constructing by attitude of an elastic space vehicle, algorithm of stabilizing of jet engines of a management system of a space vehicle, algorithm of identifying of failures of motor engines of stabilizing are designed. The pattern of an elastic space vehicle with allowance for of aerodynamic and gravitation moment is designed. In a control law are injected a possibility of extinguishing of noises, with usage of a hysteresis or space on time, both for motor engines of large draught, and for verniers. For simulation of failures of one of motor engines of stabilizing is designed and the algorithm of incomplete draught is introduced into a check algorithm -. The mathematical model of a gyroscopic meter of angular-velocity vector and check algorithm of countermeasure feelers of the sensor is designed.
On the basis of designed algorithms and accepted pattern of a space vehicle, the programmatic complex, with applying of environment of visual programming DELPHI 7 and CAD of a system of visual simulation VisSim 5, permitting to the full is designed to model difficult(complex) physical processes with allowance for of all arguments both for the elastic pattern, and for absolute solids.
The held simulation has shown high performance of designed algorithms, that allows them to put into practice.
The agenda of keywords: a management SYSTEM, SPACE VEHICLE, CONTROL LAW, CHECK ALGORITHM.
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
АНУ – алгоритм начальной установки;
БИНС – бесплатформенная инерциальная навигационная система;
БСК – базовая система координат;
БСО – бесплатформенная система ориентации;
БЦВМ – бортовая вычислительная машина;
БЦК – бортовой цифровой комплекс;
ВСК – визирная система координат;
ГИВУС – гироскопический измеритель вектора угловой скорости;
ГО – гражданская оборона;
ДБТ – двигатели большой тяги;
ДМТ – двигатели малой тяги;
ДС – двигатели стабилизации;
ДУС – датчик угловой скорости;
ИНС – инерциальная навигационная система;
ИО – исполнительные органы;
ИПП – индивидуальный противохимический пакет;
КА – космический аппарат;
ЛА – летательный аппарат;
ММ – математическая модель;
НИР – научно-исследовательская работа;
НКА – научный космический аппарат;
НТЭ - научно-технический эффект;
ОВ – отравляющие вещества;
ОП – опасная продолжительность;
ОУ – объект управления;
ПЗ – полетное задание;
ПО – признак отказа;
ПЗУ – постоянное запоминающее устройство;
ПСК – приборная система координат;
СБ – солнечные батареи;
СГК – силовой гироскопический комплекс;
ССК – связанная система координат;
СУО – система управления ориентацией;
УВВ – устройство ввода-вывода;
ФОВ – фосфороорганические отравляющие вещества;
ЦВМ – центральная вычислительная машина;
ЧЭ – чувствительный элемент;
ЭВМ – электронная вычислительная машина;
ЭМИ – электромагнитный импульс;
ЭЭ – экономический эффект.
СОДЕРЖАНИЕ
|
ВВЕДЕНИЕ………………………………………………………................ ПОСТАНОВКА ЗАДАЧИ……………………………………………......... СИСТЕМЫ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КА НА БАЗЕ БИНС…... 2.1 Бесплатформенные инерциальные навигационные системы……...2.2 Гироскопический измеритель вектора угловой скорости………… МАТЕМАТИЧЕСКИЕ МОДЕЛИ………………….……………………... Математическая модель упругого космического аппарата………... Моменты, действующие на космический аппарат………...……….. Аэродинамический момент……………………………………. Аппроксимация стандартной атмосферы……………. Построение аппроксимирующего полинома для плотности земной атмосферы………………………… Гравитационный момент………………………………………. Математическая модель ГИВУС…………………………………….. АЛГОРИТМЫ ОБРАБОТКИ ИНФОРМАЦИИ И КОНТРОЛЯ СУО И СТАБИЛИЗАЦИИ КА…………………………………………………….. Синтез наблюдателя Льюинбергера………………………………… Алгоритм оценки угловой скорости………………………………… Алгоритм обработки и контроля информации ГИВУС……………. Алгоритм стабилизации……………………………………………… Решение задачи идентификации отказов…………………………… Метод статистически гипотез………………………………………... Алгоритм контроля отказов ДС при неполной тяге………………... РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ………………….. 5.1 Моделирование отказов ГИВУС…………………………………….. 5.2 Моделирование отказов ДС………………………………………….. ЭКОНОМИЧЕСКАЯ ЧАСТЬ……………………..………………………. Обзор существующих методов……………………………….......... Смета затрат на НИР………………………………………………... 6.3 Расчет научно-технического эффекта……………………………... 6.4 Расчет экономического эффекта…………………………………... 6.5 Заключение………………………………………………………….. 7 ГРАЖДАНСКАЯ ОБОРОНА………………...…………………………… 8 ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ …….……………….….. 8.1 Общие вопросы охраны труда………………………………………… 8.2 Производственная санитария…………………………………………. 8.3 Техника безопасности…………………………………………………. 8.4 Пожарная безопасность………………………………………………... 8.5 Охрана окружающей среды…………………………………………… ЗАКЛЮЧЕНИЕ………………….…………………………………………. Список источников информации……………………………………......... Приложение А……………………………………………………………… Приложение Б……………………………………………………………… Приложение В……………………………………………………………… Приложение Г……………………………………………………………… Приложение Д……………………………………………………………… |
11 12 15 23 28 35 35 39 39 45 47 48 56 62 62 64 72 80 86 89 93 96 99 101 103 104 106 108 109 113 114 123 123 127 131137139141142 145 147 156 158 161 |
ВВЕДЕНИЕ
Системы управления, относятся к разряду сложных систем с большим количеством элементов, которые подвержены отказам. Одним из основных требований, предъявляемых к системе управления, является ее высокая надежность.
Отказ реактивных двигателей стабилизации системы управления ориентацией космического аппарата, может приводить к не выполнению целевой задачи, а отказ типа «неотключение» двигателя, кроме того, может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей.
Отказы чувствительных элементов гироскопического измерителя вектора угловой скорости, могут приводить к не выполнению задачи системы управления ориентацией космического аппарата.
Существующие методы контроля работоспособности ДС являются достаточно грубыми, чтобы выявлять отказ типа "неотключение" при наличии остаточной неполной тяги двигателя на фоне действия внешних возмущающих моментов (гравитационных, аэродинамических и др.). Поэтому разработка алгоритмов идентификации отказов двигателей стабилизации, особенно отказов с неполной тягой при наличии шумов измерений и действии внешних возмущающих воздействий, является актуальной задачей.
Таким образом, разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей.
В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов.
1 ПОСТАНОВКА ЗАДАЧИ
Возьмем для рассмотрения космический аппарат, как абсолютно твердое тело, не содержащих каких-либо движущих масс [1] (см. рис. 1.1).

Рис. 1.1 - Модель КА
Если триэдр жестко связанных с телом осей Oxyz, с началом координат в центре масс КА (связанная система координат - ССК) направить так, чтобы они совпали с главными центральными осями инерции, то центробежные моменты инерции обратятся в нуль и система уравнений Эйлера [1, 2], описывающая динамику вращения КА вокруг центра масс, примет вид (1.1):
 (1.1)
(1.1)
Наряду с динамическими уравнениями
рассматриваются кинематические
уравнения, связывающие угловые скорости
>j>
с углами поворота триэдра осей Oxyz
относительно триэдра осей некоторой
базовой системы координат (БСК), начало
которой совпадает с началом координат
ССК, а оси определенным образом
ориентированы в инерциальном пространстве
и движутся поступательно [1, 3, 4] . Пусть
углы ориентации (углы Эйлера-Крылова)
 – полностью определяют угловое положение
ССК относительно БСК [1, 4]. Понятие углов
ориентации [2] становится однозначным
лишь после того, как введена
последовательность поворотов [3, 4, 5, 6]
твердого тела вокруг осей Ox,
Oy, Oz. Для
последовательности поворотов:
– полностью определяют угловое положение
ССК относительно БСК [1, 4]. Понятие углов
ориентации [2] становится однозначным
лишь после того, как введена
последовательность поворотов [3, 4, 5, 6]
твердого тела вокруг осей Ox,
Oy, Oz. Для
последовательности поворотов:
 система
кинематических уравнений имеет вид
(1.2):
система
кинематических уравнений имеет вид
(1.2):

(1.2)
Системы (1.1) и (1.2) описывают угловое
движение твердого тела относительно
БСК. Будем предполагать, что углы
Эйлера-Крылова >j>
малы [5]. Текущие значения >j>
оцениваются в системе по информации
измерителя угловой скорости, измеряющего
интегралы от проекций вектора абсолютной
угловой скорости КА на оси чувствительности
прибора.
В качестве модели измерителя
используется модель ГИВУС [6]. Алгоритм
обработки данных в бесплатформенной
инерциальной навигационной системе
строится с использованием субоптимального
дискретного фильтра Калмана [7].
Теперь усложним задачу, рассматривая космический аппарат как упругое тело, что максимально приближает имитационную модель к реальной [1, 8].
Рассмотрим уравнения осцилляторов для упругой модели (1.3):
 (1.3)
(1.3)
где
 -
коэффициент демпфирования для каждой
отдельно взятой гармоники;
-
коэффициент демпфирования для каждой
отдельно взятой гармоники;
 - квадрат собственной частоты
недемпфированных колебаний для каждой
гармоники;
- квадрат собственной частоты
недемпфированных колебаний для каждой
гармоники;
 -
управляющий момент с учетом возможного
отказа;
-
управляющий момент с учетом возможного
отказа;
i = 1, 2, 3, 4.
Ставится задача разработать алгоритмы контроля функционирования системы управления космического аппарата, для достижения которой необходимо:
- разработать алгоритм контроля функционирования двигателей стабилизации, построенный на основе субоптимального фильтра Калмана, позволяющий по информации бесплатформенной инерциальной навигационной системы идентифицировать отказы двигателей стабилизации, в том числе, отказы с неполной тягой при наличии шумов измерений и действии внешних возмущающих воздействий;
- разработать алгоритмы обработки и контроля информации ГИВУС НКА серии «Спектр», состоящие из алгоритма оценки угловой скорости на основе фильтра Льюинбергера и алгоритмы контроля чувствительных элементов ГИВУС с учетом уходов.
2 СИСТЕМЫ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КА НА БАЗЕ БИНС
Управление космическим аппаратом с помощью любой инерциальной системы, в том числе и бесплатформенной, может рассматриваться как взаимодействие двух процессов: решения навигационной задачи и решения задачи стабилизации [1, 4]. Первая задача заключается в определении требуемой траектории летательного аппарата и в вычислении фактической траектории, вторая — в управлении аппаратом для поддержания требуемого курса с заданной точностью [9].
Инерция является наиболее универсальным фактором, позволяющим создать приборы для регистрации изменения скорости тел в пространстве. Такие приборы называются акселерометрами или датчиками ускорений. Акселерометр измеряет проекцию на свою ось чувствительности ускорения той точки космического аппарата, где он установлен. Акселерометр реагирует только на силы, прикладываемые через посредство космического аппарата [1, 2]. Если одна из составляющих общей силы, определяющей ускоренное движение аппарата, обусловлена действием тяготения, то соответствующая ей составляющая ускорения не может быть измерена акселерометром. Силы же тяготения действуют одинаково как на прибор, так и на аппарат и поэтому при отсутствии других сил с помощью акселерометра не могут быть обнаружены [1, 3].
Таким образом, при движении космического аппарата в поле тяготения измеряемое акселерометром ускорение отличается от действительного, и поэтому получило название кажущегося ускорения. Измерение кажущегося ускорения позволяет определить истинное положение космического аппарата относительно центра тяготения с помощью интегрирования навигационного уравнения [1, 10]:

где R — вектор положения центра массы аппарата относительно центра тяготения;
а>к> — вектор кажущегося ускорения центра массы аппарата;
U — вектор-потенциал поля тяготения.
Для управления необходимо знать три ортогональных составляющих вектора а>к>, т. е. иметь три датчика, установленных в центре массы космического аппарата, с тремя взаимно перпендикулярными осями чувствительности. Эти оси чувствительности должны быть ориентированы по тем осям координат, в которых задан вектор R. Триэдр осей чувствительности акселерометров будем в дальнейшем называть осями измерительной системы [1, 10], а оси, в которых задан вектор R — инерциальным координатным базисом, т. е. базисом, относительно которого отсчитывается абсолютное ускорение. Оси инерции (или оси формы) космического аппарата не совпадают с инерциальным базисом, а вращаются относительно него в зависимости от направления вектора скорости центра масс космического аппарата и угла атаки. Следовательно, для управления с помощью измерения кажущихся ускорений или, как его называют, инерциального управления необходимо либо совмещать оси измерительной системы с инерциальным координатным базисом независимо от движения аппарата, либо в каждый момент времени знать взаимное расположение осей измерительной системы и инерциального базиса. В последнем случае составляющие вектора кажущегося ускорения и оси измерительной системы должны быть перепроектированы на оси инерциального координатного базиса [11].
Наиболее выгодным расположением измерительной системы для второго из названных выше вариантов инерциального управления является совмещение ее осей с осями формы аппарата [1, 3, 5, 11].
Таким образом, техническая реализация метода инерциального управления возможна в двух вариантах. Первый — это создание устройств, которые не вращаются вместе с аппаратом и, сохраняя свое положение относительно инерциального базиса, служат опорой для измерительной системы [1]. Второй вариант — создание устройств, которые обеспечивают в течение полета вычисление параметров, определяющих углы между осями измерительной системы и инерциального базиса, а также проектирование измеряемых компонент ускорения на оси этого базиса [1].
Первый вариант привел к появлению приборов, физически моделирующих инерциальный базис на борту космического аппарата, — гиростабилизированных платформ, второй — к созданию бесплатформенных систем.
По мере развития платформенных систем проявилась их ограниченность в некоторых аспектах использования и в перспективе дальнейшего совершенствования. Стали заметными такие их недостатки, как чувствительность к большим перегрузкам и углам вращения летательного аппарата, что характерно для космических полетов [12].
БИС, как и любая инерциальная система управления летательным аппаратом, состоит из двух подсистем [12, 13, 14], которые, в свою очередь, именуются навигационной системой и системой стабилизации [12]. Задача навигационной системы — определить начальное положение летательного аппарата и программу полета (курс, высоту, скорость, угол тангажа) [12, 14]. Задача системы стабилизации — обеспечить управление рулями и тягой таким образом, чтобы выполнить задаваемую программу полета с требуемой точностью [1, 15]. Проводя аналогию с неавтоматической системой управления можно сказать, что навигационная система выполняет функции штурмана, а система стабилизации — функции летчика. При автоматизации функций летчика прежде всего он освобождается от задачи демпфирования колебаний аппарата, возникающих при изменении программы полета и действии внешних возмущений [10].
Задачей теории полностью автоматизированной системы стабилизации - является обоснование выбора законов управления [3, 10, 16], т. е. соотношений, связывающих разность между измеренными текущими и программными значениями параметров движения летательного аппарата с командами на органы управления. Законы управления в современных системах стабилизации летательных аппаратов, помимо обеспечения точности, устойчивости и определенного характера переходного процесса в системе, должны оптимизировать определенные критерии. Поэтому эти законы все чаще становятся не только неголономными, но и нелинейными [1, 3, 4, 9, 17].
В платформенных системах физически реализуются углы между осями инерциального базиса и осями измерительной системы. Эти углы непосредственно и являются параметрами управления. т. е. функциями, служащими основой для получения команды на рули после преобразований в соответствии с законом управления [9, 12]. В бесплатформенной системе стабилизации связь между инерциальным и измерительным базисами выражается в процессе вычислений через параметры, которые не могут непосредственно служить параметрами управления, поэтому теория бесплатформенных систем стабилизации содержит методы получения параметров управления как функций вычисляемых параметров связи [12].
Специфика бесплатформенной системы стабилизации в отношении математического описания объекта стабилизации состоит в том, что уравнения движения космического аппарата должны быть записаны через измеряемые датчиками параметры и через параметры связи. Это упрощает замыкание систем уравнений стабилизации [9, 12, 16, 17]. И еще одна особенность теории бесплатформенных систем стабилизации — необходимость разработки методов синтеза алгоритмов, обеспечивающих вычисление параметров связи в реальном времени, а также анализа системы ошибок, сопровождающих эти вычисления [18, 19, 20].
Широкое развитие и применение гироскопических систем и приборов ориентации и навигации летательных аппаратов [1, 3, 15, 21], судов, подводных лодок и других подвижных объектов обязано свойству их автономности, которое заключается в том, что приборы и системы, основанные на применении гироскопов, в отличие от радиолокационных и оптических систем ориентации и навигации, определяют положение подвижных объектов без каких-либо физических связей с Землей, не защищенных от внешних искусственных воздействий, создающих помехи в работе этих систем или приводящих к полному нарушению их работоспособности [3, 21].
В бесплатформенных (бескарданных) системах ориентации чувствительными элементами являются гироскопические датчики первичной информации, измеряющие углы или угловые скорости поворота КА и линейные ускорения (акселерометры). Эти датчики устанавливаются непосредственно на борту КА и работают совместно с цифровой вычислительной машиной, непрерывно производя расчет углов курса, крена и тангажа или иных параметров, определяющих ориентацию КА относительно базовой системы координат [1, 9, 21].
Бесплатформенные системы характеризуются жестким закреплением чувствительных элементов (гироскопов, акселерометров) на борту КА [1, 9]. Таким образом, принцип построения бесплатформенной системы ориентации (БСО) состоит в аналитическом построении расчетной системы координат на основе информации первичных датчиков. Математические расчеты проводятся при этом в процессе движения ЕА на бортовой ЦВМ и специальных вычислителях. Наличие блока гироскопов в типовой схеме БСО связано с решением задачи ориентации [9, 12, 15].
Возможность построения реальных конструкций и схем БСО обусловлена современным уровнем развития цифровой вычислительной техники. БСО присущи следующие отличительные признаки [15]:
отсутствие ошибок, связанных с погрешностями стабилизации собственно платформы;
отсутствие эффекта складывания рамок и, как следствие, отсутствие ограничений на угловые маневры КА;
упрощение механической части, уменьшение габаритов, массы и энергоемкости системы за счет отсутствия карданова подвеса;
потенциальное повышение надежности за счет резервирования.
Однако в таких схемах в большей степени сказываются погрешности, связанные с чувствительными элементами, поскольку они работают в более жестких условиях по сравнению с такими же элементами в платформенных системах [9, 12, 21].
Коэффициенты моделей ошибок определяются конструктивными или геометрическими характеристиками чувствительных элементов, в частности, датчиков. Величина погрешностей датчиков первичной информации зависит от самого характера линейного и углового движения КА, а при фиксированном характере движения КА модель ошибок для бесплатформенной системы содержит или требует учета большего числа членов в сравнении с моделью ошибок датчика платформенной системы [1, 3, 21]. В то же время наличие вычислителя вносит дополнительные погрешности, связанные с вычислениями. Особенностью решаемой задачи является накопление в результате интегрирования ошибок выходных параметров БСО. Вычислительные ошибки могут быть двоякой природы [21]:
- ошибки, связанные с методом вычислений. При «идеальной» вычислительной машине ошибки, связанные с методом вычислений, определяются порядком применяемого метода и числом удерживаемых членов ряда;
- ошибки, связанные с данным типом вычислителя, ограниченностью его памяти, быстродействия, длиной разрядной сетки и т. п.
Кроме того, особенностью аналитического построения базиса в текущем времени является запаздывание информации при нормальном функционировании вычислителя минимум на один такт работы вычислителя, а при сбоях в вычислителе ввиду отсутствия механической памяти (стабилизированной платформы) запаздывание информации может достигать недопустимо больших величин [12, 21].
Суммарная ошибка, обусловленная погрешностями чувствительных элементов и погрешностями вычислений, приводит к неточности построения расчетной системы координат относительно базисной системы и может быть разбита на три группы [1, 3, 9, 12 ,21]:
1) группа ошибок по модулю, от которой зависит искажение величины проекции преобразуемого вектора;
2) группа ошибок от неортогональности построенного базиса;
3) группа ошибок, определяющая поворот построенного аналитически базиса относительно идеального.
Общим для систем ориентации как платформенного, так и бесплатформенного типов является построение расчетной системы координат, в которой интегрируются уравнения ориентации и навигации, реализуемой, в первом случае электромеханическими устройствами и во втором случае аналитически [1, 3].
В общем случае аналитического построения расчетной системы координат задача ориентации КА решается с привлечением информации блока акселерометров об ускорении центра масс КА, хотя в некоторых случаях удается разделить задачу угловой ориентации и задачу определения местоположения центра масс КА [1]. Возможность такого разделения определяется выбором расчетной системы координат. Типовыми могут являться инерциальная система и горизонтальные системы координат. БСО могут быть построены на базе двухстепенных гироскопов, одноосных гиростабилизаторов, трехстепенных гироскопов со свободным подвесом и других видов чувствительных элементов [21].
В БИНС для решения задачи навигации необходим пересчет (с помощью матрицы направляющих косинусов) проекций вектора кажущегося ускорения, замеренного в жестко связанных с КА осях, на инерциальные оси [1, 10].
Для получения матрицы ориентации (матрицы направляющих косинусов) оси чувствительности трехкомпонентного блока измерителей абсолютной угловой скорости (блока двухстепенных гироскопов) должны быть зафиксированы относительно соответствующих осей чувствительности блока акселерометров. При решении навигационной задачи в БИНС задача ориентации решается независимо от уравнений поступательного движения. При этом погрешности проекций кажущегося ускорения на инерциальные оси определяются как погрешностью измерений акселерометров, так и погрешностью вычисления матрицы ориентации [1, 9, 10, 12].
Если используются датчики углового положения, то ориентация измерительной системы, связанной с датчиками, относительно базовой системы координат определяется в результате непосредственных измерений и их обработки. Однако общим во всех случаях решения задачи ориентации является измерения жестко закрепленными на борту датчиками таких кинематических величин, как угол или угловая скорость (угловое ускорение), с помощью, например, двухстепенных или трехстепенных гироскопов или же разнесенных на заданной базе акселерометров [21]. При этом наличие измерителей линейных ускорений в схеме, а также информации о напряженности нецентрального гравитационного поля Земли позволяет решать для такого типа систем как задачу ориентации, так и навигации [1, 3, 9].
Возмущенный режим работы БСО — это режим, при котором учитываются инструментальные погрешности чувствительных элементов, определенные угловой скоростью и угловым и линейным ускорениями основания [1, 3, 9, 12]. Модели ошибок этих элементов содержат кинематические величины с коэффициентами, зависящими от конструктивных характеристик чувствительных элементов.
Для уменьшения ошибок в БСО используются, например, корпусы блока гироскопов в монолитном исполнении, в которых и размещаются двухстепенные гироскопы [21]. Это позволяет обеспечить достаточную жесткость осей, связанных с измерительными осями гироскопов, и необходимую точность ориентации этих осей. При решении задачи ориентации относительно инерциального пространства используются различного вида кинематические уравнения [1,3]. Сравнительная их характеристика показывает, что в общем случае вне конкретной схемы затруднительно отдать предпочтение как определенному виду кинематических уравнений, так и определенным параметрам угловой ориентации. Однако это не исключает рациональный выбор параметров ориентации в каждой конкретной схеме реализации БСО [9].
2.1 Бесплатформенные инерциальные навигационные системы
Развитие бескарданных (бесплатформенных) базовых систем отсчета стала вполне возможной после того прогресса вычислительной техники, который привел к появлению надежных бортовых цифровых вычислительных машин, обладающих нужным объемом памяти и достаточным быстродействием [15]. Это сделало возможным непрерывное интегрирование уравнений движения космического аппарата при сколь угодно сложном характере его движения, опираясь на показания, по сути, тех же датчиков первичной информации, что и используемые в платформах. Следовательно, в бесплатформенных системах громоздкие устройства подвеса со следящими приводами «заменяются» интегрированием уравнений движения [9, 15].
Типичная схема бесплатформенной системы управления космическим аппаратом показана на (рис 2.1). С бортовой цифровой вычислительной машиной 1 соединены три группы датчиков, условно обозначенных через Д>1>,

Рис 2.1 - Схема бесплатформенной системы управления ориентацией:
1 – бортовая цифровая вычислительная машина; 2 – блок согласования; 3-исполнительные органы
Д>2> и Д>3>; вырабатываемые в машине сигналы управления преобразуются должным образом в блоке согласования 2, после чего поступают на исполнительные органы системы ориентации 3. Воздействуя на динамику космического аппарата (в зависимости от работы исполнительных органов, изменяется его угловое движение, и на входе вычислительной машины появляются измененные сигналы датчиков системы ориентации). На приведенной схеме все датчики условно разбиты на три группы в зависимости от основной задачи, выполняемой ими в полете.
Группа датчиков Д>1>, по сути, обеспечивает существование на борту математической «платформы». Этими датчиками могут быть любые устройства, позволяющие регистрировать составляющие p, q и r угловой скорости космического аппарата, параллельные осям Ox, Oy и Oz жестко связанного с ним триэдра осей. Имея непрерывно измеряемые значения p(t), q(t), r(t), вычислительная машина интегрирует кинематические уравнения углового движения и непрерывно определяет соответствующие три угла поворота жестко связанного с корпусом космического аппарата триэдра осей Oxyz относительно некоторого условного, например, начального положения этого триэдра Ox’y’z’. Поскольку в результате вычислений положение триэдра Oxyz всегда известно для текущего момента времени с нужной точностью, постольку известно и расположение относительно корпуса космического аппарата начального триэдра Ox’y’z’. Таким образом, триэдр Ox’y’z’, положение которого относительно корпуса непрерывно вычисляется, может служить базовой системой отсчета углов для поступательно движущихся осей ориентации; в этом смысле тройка датчиков Д>1> и вычислительная машина заменяют гиростабилизированные платформы [1, 3, 9, 15].
Если необходимо иметь базовую систему отсчета для орбитальных осей ориентации при известной орбите космического аппарата, то бортовая вычислительная машина должна вычислять для каждого момента времени t, кроме уже сказанного, и положение орбитальных осей ориентации Ox”, Oy”, Oz” относительно поступательно движущихся осей Ox’, Oy’, Oz’ (эти вычисления никак не связаны с работой датчиков системы ориентации, в них используются данные об орбите космического аппарата и о взаимном положении осей Ox’, Oy’, Oz’ и Ox”, Oy”, Oz” в начальный момент времени t=0, которое предполагается известным). Поскольку в машине в этом случае есть все данные о взаимном положении триэдров Ox’y’z’ и Ox”y”z”, с одной стороны, и триэдров Oxyz и Ox’y’z’, с другой, то тем самым легко вычисляется и взаимное положение триэдров Oxyz и Ox”y”z”, т.е. углы ориентации для орбитальной системы осей [3]. В этом смысле тройка датчиков Д>1> и вычислительная машина, в память которой введены параметры заданной орбиты, заменяют платформу. Совершенно аналогично можно было бы вычислять в бортовой машине и углы ориентации для скоростной системы осей, поскольку их вращение в функции времени тоже определяется параметрами орбиты [1].
Приведенные примеры указывают на большую гибкость, которую сообщает управлению ориентацией использование бортовой вычислительной машины, - переход от управления относительно поступательно движущихся осей ориентации к управлению в орбитальных или скоростных осях может производиться практически мгновенно путем простого изменения программы работы машины [12, 15].
В качестве датчиков Д>1>, о которых
было сказано, что они являются любыми
измерителями компонент угловых скоростей,
могут быть использованы высокочастотные
датчики угловых скоростей либо одноосные
гиростабилизаторы, т.е. приборы, содержащие
лишь один канал стабилизации углового
положения платформы вместо трех. В
рассматриваемом случае платформа не
будет устанавливаться в кардановом
подвесе, а будет иметь одну единственную
ось вращения – ось Ox. Угол
поворота платформы относительно корпуса
космического аппарата вокруг этой оси
обозначим через
 .
В таком случае компонента p’
угловой скорости вращения платформы
по направлению Ox относительно
абсолютного пространства будет равна
.
В таком случае компонента p’
угловой скорости вращения платформы
по направлению Ox относительно
абсолютного пространства будет равна
 .
Если интегрирующий гироскоп и следящая
система работают идеально, то
.
Если интегрирующий гироскоп и следящая
система работают идеально, то
 и ,следовательно,
и ,следовательно,
 ,
т.е. по темпу поворота платформы одноосного
гиростабилизатора относительно корпуса
космического аппарата можно судить о
компоненте угловой скорости по
соответствующей оси [9, 12].
,
т.е. по темпу поворота платформы одноосного
гиростабилизатора относительно корпуса
космического аппарата можно судить о
компоненте угловой скорости по
соответствующей оси [9, 12].
Важно обратить внимание на то обстоятельство, что вращение вокруг одной оси может быть неограниченным, и поэтому недостатки, свойственные платформам в кардановых подвесах, отсутствуют [9]. Очевидно, что на борту космического аппарата надо иметь три таких одноосных гиростабилизатора с взаимно перпендикулярными осями чувствительности; образно выражаясь, для получения бескарданной базисной системы в этом случае надо «распилить» обычную гиростабилизированную платформу на три части и подсоединить их к вычислительной машине. В каком случае предпочтительно использовать датчики угловых скоростей и в каком - одноосные гиростабилизаторы – дело конкретной конструктивной проработки. Достаточно указать лишь на то, что в первом случае гироскопический элемент работает в измерительном режиме, во втором же случае – в режиме нуль-индикатора [21], что всегда проще для гироскопического элемента, хотя сам одноосный гиростабилизатор и сложнее датчика угловой скорости.
Бесплатформенные системы, использующие только набор датчиков Д>1>, обладают тем же недостатком, что и некорректируемые гироплатформы, - вследствие уходов гироскопов их точность с течением времени падает. Чтобы избежать этого, к вычислительной машине подсоединяют датчики, обозначенные через Д>2 > на рис.2.1. Это могут быть самые различные датчики внешней информации - построители местной вертикали, астродатчики и т.п [1, 12, 15]. По их сигналам вносятся поправки в вычисления, произведенные в машине на основе информации, получаемой с датчиков группы Д>1>, и тем самым достигается независимость точности измерений углов ориентации от времени непрерывной работы. В некоторых режимах можно работать, основываясь на информации об углах ориентации, получаемой только с датчиков Д>2>. В этих режимах датчики Д>1> могут играть роль простых датчиков угловых скоростей, если последние нужны для формирования сигналов управления. Возможны и другие комбинации использования подключенных к вычислительной машине датчиков: если, например, нужно реализовать режим орбитальной ориентации, то достаточно включить один датчик группы Д>2> – построитель местной вертикали, а по сигналам датчика Д>1> произвести курсовую ориентацию космического аппарата, используя их как инерциальные датчики ориентации. Количество датчиков Д>2> и их состав определяются задачами, стоящими перед космическим аппаратом [9, 12, 15, 21].
Приведенные примеры показывают большую гибкость системы управления ориентацией, использующей бесплатформенную базисную систему отсчета, не только в части управления угловым положением космического аппарата по отношению к разным осям ориентации, но и в том, что один и тот же режим ориентации может быть получен путем включения различных наборов датчиков.
Гиростабилизированные платформы применяются для обеспечения режимов управления движением центра масс и стабилизации углового положения при работе маршевых двигателей или управления спутником в атмосфере. Бесплатформенная система с использованием бортовой вычислительной машины способна обеспечить и такие режимы. С этой целью к ней подключается группа датчиков, обозначенная через Д>3> (см. рис.2.1), например акселерометров [9, 15]. Хотя такие акселерометры стоят неподвижно относительно корпуса космического аппарата и поэтому их оси чувствительности участвуют в поворотах вместе с корпусом, их показания для некоторого мгновения t всегда могут быть сопоставлены с углами ориентации относительно абсолютного пространства для того же t, получаемыми указанными выше способами. Это позволяет производить в машине соответствующие пересчеты и в конечном итоге путем интегрирования уравнений движения центра масс иметь все нужные данные для управления движением центра масс [1]. На рис. 2.1 связь бортовой вычислительной машины с контуром управления движением центра масс и управления угловым положением при режимах, связанных с большими силовыми воздействиями на космический аппарат, не показана.
Бортовая вычислительная машина не только не делает управление гибким и вполне заменяет гироплатформу, но способна производить обработку сигналов, поступающих с датчиков внешней информации, с целью выделения полезного сигнала из шумов [7, 22]. Таким образом, во всех отношениях, в том числе и в способности работать фильтром для сигналов, характеризуемых заметными флуктуациями, бесплатформенная система вполне заменяет корректируемые гиростабилизированные платформы [12].
Применение бесплатформенных систем имеет большие перспективы, поскольку они не обладают недостатками платформ, установленных в кардановых подвесах [9, 12, 15].
2.2 Гироскопический измеритель вектора угловой скорости
Гироскопические системы ориентации позволяют получить необходимую информацию для автоматического управления ЛА автономными методами, без каких-либо иных, не зависящих от внешних помех источников информации (локация, радионавигация, астроориентация и др.) [1, 21].
Бесплатформенные (бескарданные) системы ориентации, чувствительными элементами которых являются гироскопические датчики первичной информации, измеряющие углы или угловые скорости поворота ЛА и линейные ускорения (акселерометры и физические маятники). Эти датчики устанавливаются непосредственно на борту ЛА и работают совместно с цифровой или аналоговой вычислительной машиной, непрерывно производя расчет углов курса, крена и тангажа или иных параметров, определяющих ориентацию ЛА относительно базовой системы координат [1, 3, 9, 12].
В бесплатформенных системах ориентации и навигации гироскопы и акселерометры устанавливаются непосредственно на корпусе ЛА либо монтируются в специальные блоки чувствительных элементов. Сигналы этих датчиков поступают на вход ЭВМ, которая решает задачу ориентации аналитически, как бы, заменяя собой карданов подвес и координатный преобразователь гироплатформы.
Наибольшее распространение в бесплатформенных системах ориентации и навигации получают прецизионные датчики угловых скоростей (ДУС) и гироскопы на электростатическом подвесе, определяющие углы поворота ЛА вокруг центра его масс; также используются угловые и линейные акселерометры, установленные определенным образом на корпусе ЛА [1, 9, 21]. В отличие от систем ориентации с гироплатформами в бесплатформенных системах гироскопические датчики и акселерометры работают в более тяжелых условиях эксплуатации вследствие изменения расположения приборов по отношению к направлению гравитационного поля Земли, больших скоростей и ускорений, возникающих при вращении, колебаниях и вибрации корпуса ЛА [1].
Точность же измерения угловых скоростей, ускорений или угловых перемещений КА должна быть того же уровня, который достигнут в системах платформенного типа.
Датчики угловых скоростей – это один из основных и наиболее совершенных чувствительных элементов систем управления, стабилизации и навигации [21].
К характеристикам ДУС предъявляются очень жесткие требования. Так, верхний диапазон скоростей, измеряемых современными ДУС, соответствует десяткам и сотням градусам в секунду. Верхний диапазон входных воздействий, в котором ДУС обязан обеспечивать измерения угловой скорости, достигает 100 Гц [21].
Прецизионные ДУС бесплатформенных инерциальных систем должны иметь разрешающую способность до тысячных долей градусов в час и линейность до 10-3%, причем эти ДУС должны формировать выходной сигнал в цифровом виде. В широком диапазоне варьируются требования к массовым и габаритным параметрам приборов; из-за миниатюризации ДУС в последнее время значительно уменьшились величины собственного кинетического момента их гироскопов [1, 9, 12, 21].
Датчик угловой скорости (ДУС) служит для измерения угловой скорости КА от 0,001 до 10 с-1 в инерциальном пространстве. Для этой цели можно применять как двухстепенные, так и трехстепенные гироскопы. Гиротахометр (рис. 2.2) представляет собой обычно гироскоп с двумя степенями свободы и жесткой отрицательной обратной связью, которая создает противодействующий момент, пропорциональный угловому отклонению рамки от исходного положения для получения приемлемых переходных процессов применяются специальные демпферы; если гироскоп помещается в поплавок, то демпфирование осуществляется жидкостью [1, 21].

Рис. 2.2 - Кинематическая схема гиротахометра:
1 – ротор; 2 – рамка; 3 – датчик сигнала; 4 – демпфер; 5 – цапфа выходной оси; 6 – пружины; Н – кинетический момент гироскопа.
Величина момента сухого трения М>0>, определяет порог чувствительности гироскопа по отношению к измеряемой скорости. В поплавковых гироскопах момент М>0> пренебрежимо мал. Поэтому в установившемся режиме угол поворота рамки относительно ее оси [21]

К>пр> – приведенная жесткость пружины.
ГИВУС включает в себя шесть измерителей с некомпланарным расположением осей чувствительности (измерительных осей).
Все шесть измерительных осей ( )
при номинальном положении располагаются
параллельно ребрам базового правильного
шестигранника, вписанного в конус
вращения с углом полураствора ,
равным 0,9553 рад, и имеющего симметричное
расположение ребер по кругу основания
конуса с угловым шагом ,
равным 1,04 рад [21].
)
при номинальном положении располагаются
параллельно ребрам базового правильного
шестигранника, вписанного в конус
вращения с углом полураствора ,
равным 0,9553 рад, и имеющего симметричное
расположение ребер по кругу основания
конуса с угловым шагом ,
равным 1,04 рад [21].
В качестве приборной системы координат принимается правая ортогональная Ox>п>y>п>z>п>, материализованная посадочными местами на корпусе ГИВУС. Ориентация осей чувствительности ГИВУС относительно осей приборной системы координат приведена на рисунке (рис 2.3) где:
Ox>п>y>п>z>п> – приборная система координат ГИВУС;
– положительные направления осей
чувствительности ГИВУС (измерителей
А>1>, А>2>, А>3>, А>4>, А>5>,
А>6> соответственно).
Оси чувствительности
 и
и
 параллельны плоскости х>п>Оу>п>.
На рисунке (рис. 2.4)
показаны положительные направления
углов отклонения осей чувствительности
измерителей относительно номинального
положения, где
параллельны плоскости х>п>Оу>п>.
На рисунке (рис. 2.4)
показаны положительные направления
углов отклонения осей чувствительности
измерителей относительно номинального
положения, где
 – номинальные положения осей
чувствительности измерителей А>1>,
А>2>, А>3>, А>4>, А>5>, А>6>
соответственно;
– номинальные положения осей
чувствительности измерителей А>1>,
А>2>, А>3>, А>4>, А>5>, А>6>
соответственно;
>1>, >1>, >2>, >2>,…, >6>, >6> – положительные углы отклонения осей относительно номинального положения.
При вращении ГИВУС вокруг оси
чувствительности
 в положительном направлении (против
часовой стрелки, если смотреть с конца
вектора) выходная информация с измерителя
А>1> (А>2>, А>3>, А>4>, А>5>,
А>6>) соответствует положительному
значению параметра и наоборот.
в положительном направлении (против
часовой стрелки, если смотреть с конца
вектора) выходная информация с измерителя
А>1> (А>2>, А>3>, А>4>, А>5>,
А>6>) соответствует положительному
значению параметра и наоборот.
Относительная ориентация осей приборной системы координат и строительной системы координат изделия такова, что ось х>п> совпадает с отрицательным направлением оси z>изд>; ось у>п> с положительным направлением оси х>изд>; z>п> совпадает с отрицательным направлением оси у>изд>.
C гивус выходная информация в дискретном виде выдается с каждого измерителя (А>1>, А>2>, А>3>, А>4>, А>5>, А>6>) в виде унитарного кода – последовательности импульсов, транслируемых в БЦВК по электрически не связанным каналам. Каждый канал информации имеет две функциональные линии связи; по одной линии выдаются импульсы, соответствующие положительной проекции, а по другой линии, соответствующие отрицательной проекции угловой скорости на ось чувствительности измерителя [1, 3, 9, 21].

Рис. 2.3 - Ориентация осей чувствительности ГИВУС относительно осей приборной системы координат

>i> соответствует >1>>6>
 соответствует
соответствует


Рис.2.4 - Положительные направления углов отклонения осей чувствительности измерителей относительно номинального положения
3 МАТЕМАТИЧЕСКИЕ МОДЕЛИ
3.1 Математическая модель упругого космического аппарата
Возьмем для рассмотрения космический аппарат, как абсолютно твердое тело, не содержащих каких-либо движущих масс (см. рис. 1.1) [1].
Если триэдр жестко связанных с телом осей Oxyz с началом координат в центре масс КА (связанная система координат - ССК) направить так, чтобы они совпали с главными центральными осями инерции, то центробежные моменты инерции обратятся в нуль и система уравнений Эйлера, описывающая динамику вращения КА вокруг центра масс, примет вид (3.1) [1, 3]:
(3.1)
где
 ,
,
 ,
,
 – проекции вектора абсолютной угловой
скорости тела на оси
– проекции вектора абсолютной угловой
скорости тела на оси
Ox,Oy и Oz соответственно.
 ,
, ,
,
 – проекции главного момента М на оси
Ox,Oy и Oz
соответственно.
– проекции главного момента М на оси
Ox,Oy и Oz
соответственно.
 ,
,
 и
и
 - моменты инерции тела относительно
тех же осей.
- моменты инерции тела относительно
тех же осей.

 (3.2)
(3.2)

В приведенных выражениях (3.2) x,y,z – координаты элементарной массы тела, а интегралы берутся по всей массе твердого тела. Космическим аппаратом целесообразней управлять вокруг ССК [1, 3, 4].
Воспользуемся гироскопическим измерителем вектора угловой скорости и рассмотрим режим построения базовой ориентации с произвольными начальными условиями [1]. Командные приборы и исполнительные органы устанавливаем с учетом главных центральных осей инерции, таким образом, что управление вокруг трех взаимно перпендикулярных осей Ox, Oy, Oz - независимо.
Наряду с динамическими уравнениями рассматриваются кинематические уравнения, связывающие угловые скорости >j> с углами поворота триэдра осей Oxyz относительно триэдра осей некоторой базовой системы координат (БСК) [1, 3], начало которой совпадает с началом координат ССК, а оси определенным образом ориентированы в инерциальном пространстве и движутся поступательно.
Пусть углы ориентации (углы Эйлера-Крылова)
– полностью определяют угловое положение
ССК относительно БСК. Понятие углов
ориентации становится однозначным лишь
после того, как введена последовательность
поворотов твердого тела вокруг осей
Ox, Oy, Oz.
Для последовательности поворотов:
система
кинематических уравнений имеет вид [1,
4, 5, 23]:
(3.3)
Системы (3.1) и (3.3) описывают угловое движение твердого тела относительно БСК. Будем предполагать, что углы Эйлера-Крылова >j> малы. Текущие значения >j> оцениваются в системе по информации измерителя угловой скорости, измеряющего интегралы от проекций вектора абсолютной угловой скорости КА на оси чувствительности прибора [21].
Известны также некоторые другие методы [1, 4, 23] описания конечного поворота твердого тела не тремя, а четырьмя параметрами: исследование параметров Родрига-Гамильтона, Кейли-Клейна, или с использованием кватернионов [1, 3, 6].
Интегрируя кинематические уравнения
(3.3) в бортовой цифровой
вычислительной машине (БЦВМ) при начальных
значениях углов
 ,
и интегрируя уравнения движения центра
масс КА при соответствующих начальных
условиях, реализуют бесплатформенную
инерциальную навигационную систему
(БИНС). Таким образом, считаем, что текущие
величины углов >j>
непрерывно вычисляются в БИНС [9, 12].
,
и интегрируя уравнения движения центра
масс КА при соответствующих начальных
условиях, реализуют бесплатформенную
инерциальную навигационную систему
(БИНС). Таким образом, считаем, что текущие
величины углов >j>
непрерывно вычисляются в БИНС [9, 12].
Характерной особенностью момента
управления
 является активность, он появляется в
результате включения вспомогательных
органов (в частности реактивных двигателей
стабилизации), и исчезает при их
отключении. Момент М>упрj>
формируется в соответствии с логикой
закона управления и обеспечивает
заданное угловое положение КА [1, 8, 10].
является активность, он появляется в
результате включения вспомогательных
органов (в частности реактивных двигателей
стабилизации), и исчезает при их
отключении. Момент М>упрj>
формируется в соответствии с логикой
закона управления и обеспечивает
заданное угловое положение КА [1, 8, 10].
Источником внешнего возмущающего
момента М>вj>, является
взаимодействие КА с внешней средой,
приводящее к появлению действующих на
корпус внешних сил – гравитационного,
аэродинамического, светового, магнитного
[1, 3, 10, 12]. Момент
имеет две составляющих –
 (создаваемую реактивными двигателями),
и
(создаваемую реактивными двигателями),
и
 (создаваемым моментным магнитоприводом
и др. Будем рассматривать только
)
[1].
(создаваемым моментным магнитоприводом
и др. Будем рассматривать только
)
[1].
Важным свойством динамической системы ориентации является: если осями ориентации являются поступательно движущиеся оси, то при соответствующем законе управления вместо сложных пространственных поворотов космического аппарата можно изучать три независимых плоских угловых движения, что мы и сделаем в системе, т.е.:
 (3.4)
(3.4)
получено три независимых уравнения.
Закон управления формируется путем сложения позиционного сигнала >j>> > и скоростного сигнала >j>, умноженного на коэффициент усиления k>j> (j=x, y, z):
 .
(3.5)
.
(3.5)
Усложним рассматриваемую модель. Для этого будем рассматривать ее как упругое тело [1, 3, 6-12]. Уравнения осцилляторов для упругой модели имеет вид:
(3.6)
где
-
коэффициент демпфирования для каждой
отдельно взятой гармоники.
- квадрат собственной частоты не
демпфированных колебаний для каждой
гармоники.
-
управляющий момент с учетом возможного
отказа. i = 1,2,3,4. Коэффициенты
 мы берем из таблицы, приведенной в
приложении А.
мы берем из таблицы, приведенной в
приложении А.
При нулевой правой части, мы получаем свободные колебания, зависящие от начальных отклонений, угловых скоростей и др. При ненулевой правой части мы получаем вынужденные колебания, которые накладываются на свободные колебания. Они являются затухающими со временем, в силу коэффициента демпфирования. Прототипом для данной упругой модели послужил маятник на пружинке. Рассматриваемая система является линейной [1].
3.2 Моменты внешних сил, действующие на космический аппарат
3.2.1 Аэродинамический момент
Взаимодействие корпуса [1, 3] движущегося с большой скоростью космического аппарата с разряженной атмосферой больших высот вызывает появление аэродинамических сил и моментов. Первые приводят главным образом к постепенному торможению космического аппарата и связанного с этим эволюции его орбиты, в конечном итоге приводящей к падению на поверхность планеты ее искусственных спутников. А вторые к появлению внешних моментов, иногда благотворно, а чаще неблаготворно сказывающихся на режимах ориентации.
Особенностью аэродинамического взаимодействия корпуса космического аппарата с внешней средой [1, 3] является то, что вследствие малой плотности среды длина свободного пробега молекул атмосферы не может считаться малой по сравнению с характерными линейными размерами корпуса космического аппарата. В результате соударение "отскочившей" от поверхности космического аппарата молекулы внешней среды с другой такой молекулой происходит на большом удалении от него, что позволяет считать, что каждая молекула атмосферы взаимодействует с корпусом космического аппарата независимо от других. Это приводит не к обычной в аэродинамике схеме обтекания тела сплошной среды, а к картине "бомбардировки" такого тела отдельными молекулами.
Взаимодействие молекул разряженной среды с поверхностью твердого тела мыслимо идеализировать двояким образом: либо как упругое соударение с мгновенным зеркальным отражением молекулы, либо считать, что при соударении молекула отдает всю свою энергию телу, приходит с ним в температурное равновесие, а затем выходит во внешнее пространство с тепловой скоростью. Поскольку тепловая скорость молекулы невелика по сравнению со скоростью движения космического аппарата, последнюю схему можно считать схемой абсолютно упругого удара. Вторая из приведенных схем значительно лучше описывает наблюдаемые на практике явления и поэтому кладется в основу расчетов. Однако фактически происходят как упругие, так и неупругие соударения, и в более тонких расчетах следует учитывать долю тех и других [1, 3, 6].
Если по аналогии с обычной аэродинамикой считать, что возникающие силы взаимодействия тела и среды пропорциональны скоростному напору
 ; (3.7)
; (3.7)
где
 - плотность внешней среды,
- плотность внешней среды,
 - относительная скорость тела и среды,
то элементарная сила, действующая на
площадку dS, будет:
- относительная скорость тела и среды,
то элементарная сила, действующая на
площадку dS, будет:
 ;
(3.8)
;
(3.8)
здесь
 - некоторый коэффициент, а
- некоторый коэффициент, а
 - угол между внешней нормалью к элементарной
площадке dS и вектором скорости
этой площадки относительно внешней
среды. Написанное соотношение является
следствием закона сохранения импульса,
и легко убедиться, что для абсолютно
неупругого удара с=2.
- угол между внешней нормалью к элементарной
площадке dS и вектором скорости
этой площадки относительно внешней
среды. Написанное соотношение является
следствием закона сохранения импульса,
и легко убедиться, что для абсолютно
неупругого удара с=2.
Элементарный аэродинамический момент относительно центра масс
 ; (3.9)
; (3.9)
где r — радиус-вектор площадки dS, имеющий начало в центре масс тела, а полный момент
 ; (3.10)
; (3.10)
В последнем выражении интегрирование
производится по той части поверхности
космического аппарата S,
которая омывается внешней средой при
его движении. Входящая в (3.8),
а, следовательно, и в (3.10)
скорость V,
строго говоря, складывается из скорости
движения центра масс
 и линейных скоростей элемянтарных
площадок внешней поверхности корпуса
космического аппарата, связанных с его
вращением вокруг центра масс. Первое
слагаемое
и линейных скоростей элемянтарных
площадок внешней поверхности корпуса
космического аппарата, связанных с его
вращением вокруг центра масс. Первое
слагаемое
 ,
связанное с
,
будет, поэтому функцией конфигурации
омываемой части корпуса, а, следовательно,
функцией конфигурации внешней поверхности
космического аппарата и его положения
относительно вектора скорости
.
Второе слагаемое, кроме того, будет
являться функцией угловой скорости
космического аппарата. Сравнение модуля
скорости
,
связанное с
,
будет, поэтому функцией конфигурации
омываемой части корпуса, а, следовательно,
функцией конфигурации внешней поверхности
космического аппарата и его положения
относительно вектора скорости
.
Второе слагаемое, кроме того, будет
являться функцией угловой скорости
космического аппарата. Сравнение модуля
скорости
 с наибольшим возможным значением модуля
линейной скорости внешней поверхности
космического аппарата, порожденной его
вращением вокруг центра масс, показывает,
что вторым слагаемым в задачах активной
ориентации космических аппаратов можно
пренебрегать [1 ,3, 12]. Это связано как с
очень малыми угловыми скоростями, так
и с относительно небольшими размерами
современных космических аппаратов.
Поэтому всюду будет делаться предположение
о равенстве нулю внешнего аэродинамического
момента, связанного с вращением
космического аппарата вокруг его центра
масс. В этой же связи скорость
V в выражении
(3.8) может
быть определена равенством
с наибольшим возможным значением модуля
линейной скорости внешней поверхности
космического аппарата, порожденной его
вращением вокруг центра масс, показывает,
что вторым слагаемым в задачах активной
ориентации космических аппаратов можно
пренебрегать [1 ,3, 12]. Это связано как с
очень малыми угловыми скоростями, так
и с относительно небольшими размерами
современных космических аппаратов.
Поэтому всюду будет делаться предположение
о равенстве нулю внешнего аэродинамического
момента, связанного с вращением
космического аппарата вокруг его центра
масс. В этой же связи скорость
V в выражении
(3.8) может
быть определена равенством
 .
.
П усть
космический аппарат имеет форму сферы,
тогда численное значение аэродинамического
момента действующего на сферу, и при
усть
космический аппарат имеет форму сферы,
тогда численное значение аэродинамического
момента действующего на сферу, и при
 будет равно
будет равно
 (3.11)
(3.11)
Полученное выражение говорит о том, что
при поворотах вокруг центра масс
космический аппарат сферической формы
имеет два положения равновесия,
соответствующие
 и
и
 .
Если направление отсчета расположения
центра давления относительно центра
масс взять по направлению вектора
,
то первое положение равновесия
характеризуется расположением центра
масс за центром сферы (задняя центровка),
а второе расположением центра масс
перед центром сферы (передняя центровка).
Рассматривая изменение аэродинамического
момента в функции угла
.
Если направление отсчета расположения
центра давления относительно центра
масс взять по направлению вектора
,
то первое положение равновесия
характеризуется расположением центра
масс за центром сферы (задняя центровка),
а второе расположением центра масс
перед центром сферы (передняя центровка).
Рассматривая изменение аэродинамического
момента в функции угла
 в окрестности положения равновесия,
можно написать [8]:
в окрестности положения равновесия,
можно написать [8]:
 ;
(3.12)
;
(3.12)
Это даст для
задней центровки
 ,
а для передней
,
а для передней
 .
Знаки приведенных производных говорят
о том, что при задней центровке
.
Знаки приведенных производных говорят
о том, что при задней центровке
 космический аппарат статически неустойчив
(возникающий момент имеет тот же знак,
что и отклонение), а при передней
центровке
космический аппарат статически неустойчив
(возникающий момент имеет тот же знак,
что и отклонение), а при передней
центровке —
устойчив.
—
устойчив.
Это указывает на основную закономерность, характерную для аэродинамических моментов, возникающих при космическом полете: возникновение моментов связано с силами сопротивления и зависит от расположения линий действия этих сил относительно центра масс. При более сложных конфигурациях космических аппаратов расчет заметно усложняется, приходится учитывать взаимное затенение элементов конструкции, переменность (зависимость от угла поворота) омываемой потоком поверхности S и т.п. Однако и в этих громоздких расчетах фактически сохраняется приведенная методика. Результаты подобных расчетов, как правило, представляются в виде зависимостей аэродинамических коэффициентов моментов от соответствующих углов, характеризующих положение тела относительно вектора скорости центра масс [1, 3, 8].
Формула (3.12)
указывает на зависимость аэродинамического
момента от положения центра масс на
прямой ОА. В условиях
невозмущенного движения внешние моменты
должны быть полностью уравновешены.
В рассматриваемом случае это означает,
что угол
должен быть равен нулю, т. е. линия ОА
должна быть параллельной вектору
скорости. Если считать, что происходит
ориентация в скоростных осях, то
естественно направить ось Ох
космического аппарата по прямой
OA,
тогда при идеальной ориентации жестко
связанная с корпусом космического
аппарата ось Ох будет совпадать
по направлению с вектором
,
и вследствие равенства нулю угла
аэродинамический момент будет равен
нулю [1. 3].
Таким образом, вопрос о величине
аэродинамического момента и статической
устойчивости оказывается связанным с
расстоянием
 взятым на оси Ох от центра масс
до точки А. Точку приложения
равнодействующей аэродинамических сил
называют центром давления, и,
следовательно, вектор
определяет положение центра давления
относительно центра масс. Для тела
произвольной формы тоже можно ввести
понятие центра давления как точки
пересечения линий действия равнодействующих
аэродинамических сил.
взятым на оси Ох от центра масс
до точки А. Точку приложения
равнодействующей аэродинамических сил
называют центром давления, и,
следовательно, вектор
определяет положение центра давления
относительно центра масс. Для тела
произвольной формы тоже можно ввести
понятие центра давления как точки
пересечения линий действия равнодействующих
аэродинамических сил.
Как уже говорилось, аэродинамические
силы и моменты пропорциональны скоростному
напору q (3.7).
Поскольку скорость полета
определяется законами небесной механики,
постольку при изменении высоты полета
на малую долю радиуса планеты скорость
изменяется мало. В то же время известно,
что плотность окружающей планету
атмосферы чрезвычайно сильно зависит
от высоты. Это позволяет утверждать,
что величина q является для
данного класса космических аппаратов
(например, для искусственных спутников
Земли, движущихся по почти круговым
орбитам) главным образом функцией
плотности среды
,
т.е. в конечном итоге - высоты полета.
Следовательно, для космических аппаратов,
траектории которых достаточно удалены
от планет, аэродинамические моменты
будут пренебрежимо малы [1, 3, 10].
Для математического моделирования, будем рассматривать модель реального космического аппарата [10], с заданными линейными размерами.
 Солнечные
батареи Корпус КА
Солнечные
батареи Корпус КА
Рис. 3.1.

Рис. 3.2.
Исходя из выше представленной модели космического аппарата, аэродинамические моменты в каждом из каналов, можно представить в виде:

 (3.13).
(3.13).

3.2.1.1 Аппроксимация плотности земной атмосферы аналитическими зависимостями
Предполагается, что рассматриваемая модель упругого космического аппарата [1, 3, 10, 11] движется в атмосфере земли. Тогда на КА действуют моменты внешних сил, такие как гравитационный и аэродинамический моменты. Для нахождения аэродинамического момента, необходимо знать плотность атмосферы, которая зависит от высоты полета.
В данной задаче требуется [11, 24] аппроксимировать функцию полиномом 3-его порядка вида:
 ;
(3.14)
;
(3.14)
Полином (3.14) в каждом из узлов аппроксимации должен удовлетворять условию:
 ;
(3.15)
;
(3.15)
Таким образом, задача аппроксимации функции сводится к решению системы с N+1 уравнений с тремя неизвестными:
 ;
(3.16)
;
(3.16)
Это объясняется тем, что полином должен пройти через все N+1 точек (в данном случае это 25 точек) в которых задана функция x = x(t).
Метод наименьших квадратов позволяет такую систему привести к решаемой системе. Запишем функционал:
 .
.
Это достигается тогда, когда выполняется:
 ;
;
Взяв соответствующие производные, получим систему:
 ;
;
(3.17)
В отличии от системы (3.16) полученная система определена и имеет единственное решение [24].
В результате проведенных расчетов, для составления системы, были произведены расчеты, приводить которые нецелесообразно ввиду их громоздкости.
Подставив в систему (3.17) соответствующие значения, в результате мы получим систему. Эту систему будем решать методом Гаусса.
3.2.1.2 Построение аппроксимирующего полинома для плотности земной атмосферы
Воспользовавшись таблицей стандартной атмосферы [10,11], построим графики зависимостей от высоты функции Po(H):
Плотность:

Рис. 3.3 - Зависимость плотности воздуха от высоты
Аппроксимирующий полином:

3.2.2 Гравитационный момент
В обычных задачах механики [1, 3, 6, 10, 11, 12], связанных с ее техническими приложениями, ускорения силы тяжести в различных точках материального тела считаются равными как по величине, так и по направлению. Это сразу приводит к известному положению о совпадении центра масс и центра тяжести материального тела и, как следствие, к равенству нулю момента гравитационных сил относительно центра масс. На самом деле векторы ускорения силы тяжести различных точках тела всегда различны, вследствие того, что все они направлены к центру Земли, а, следовательно, если рассматриваемые точки не лежат на одной прямой, проходящей через центр притяжения, то векторы параллельны, а если точки лежат на одной такой прямой, то – имеют различное удаление от центра притяжения и, значит, соответствующие ускорения отличаются по величине. Однако это уточнение в обычных задачах механики несущественно, поскольку размеры технических сооружений малы по сравнению с радиусом Земли, и поэтому вызванные сформулированным здесь уточненные моменты столь малы по сравнению с другими, что учет их не смысла.
Космический аппарат, движущийся по околоземной орбите [6], тоже мал по сравнению с расстоянием до центра притяжения планеты, однако он не подвержен (если не считать времени включения двигателей) действию больших внешних моментов, и поэтому пренебрежение малыми в обычной технике моментами (гравитационными, связанными со световым давлением и т. п.) уже не будет законным без соответствующей оценки этих моментов [1, 3].
Прежде, чем получить формулы для вычисления гравитационных моментов и обсудить некоторые следствия, вызванные существованием этих внешних моментов, поясним физическую сущность рассматриваемого явления па простейшем примере. Пусть в центральном ньютоновом поле сил находится тело, могущее быть представленным в виде двух одинаковых точечных масс, соединенных невесомым стержнем (идеализированная гантель), и пусть этот стержень будет наклонен на некоторый угол (отличный от 0 и pi/2) к линии, соединяющей его середину А с центром притяжения С (рис. 3.4).

Рис. 3.4 – Тело в виде двух одинаковых точечных масс, соединенных невесомым стержнем (идеализированная гантель) в ньютоновом поле
Если принять обычные допущения о параллельности и равенстве сил тяжести) действующих на обе массы гантели (считаем, что на них действует ускорение силы тяжести, соответствующее точке А), то связанные с ними силы G не дали бы момента относительно точки А, являющейся центром масс рассматриваемого тела. На самом деле силы тяжести будут действовать по прямым В1С и В2С, а величина силы тяжести в точке И1 будет меньше, чем в точке И2, поскольку В1С > В2С. Поэтому к “обычным” силам G, вычисленным по вектору ускорения силы тяжести, соответствующему точке А, следует ввести поправки, например малые силы P1i и P2, изменяющие должным образом величины сил тяжести, действующий на материальные точки, и силы P1 и Р2, изменяющие должным образом направления этих сил тяжести. Из рисунка видно, что пара сил R1 и R2 и пара сил P1 и Р2 (их можно считать 'парами, постольку малые силы Р1 и Р2, а также R1 и R2 будут отличаться друг от друга на .величины высшего порядка малости) создают моменты одного знака, стремящиеся совместить ось тела B1B2 с исправлением АС.
Таким образом, как зависимость величины ускорения силы тяжести от расстояния до центра притяжения, так и центральность поля тяготения приводят к эффектам одного типа - к появлению моментов, стремящихся повернуть ось тела, связанную с геометрией распределения масс в нем, в некоторое определенное положение относительно прямой, соединяющей центр масс тела с центром притяжения.

Рис. 3.5.
Найдем выражения, позволяющие вычислять составляющие вектора гравитационного момента Мгр, действующего на некоторое тело S [1, 3]. Введем связанную с телом правую систему координат ОXоYоZo с ортами i, j, k и началом в центре масс тела О, которая совпадает с орбитальной. Соответственно ось OYo натравим по продолжению радиуса-вектора, соединяющего центр притяжения С с началом О, а ось ОXo расположим в мгновенной орбитальной плоскости. Гравитационный момент, действующий на тело S, будет равен:
 ;
;
где p - радиус-вектор некоторой элементарной массы материального тела,
dG-вектор силы тяжести, действующей на эту элементарную массу. Очевидно, что
 .
.
Здесь g - ускорение силы тяжести на поверхности планеты, r – радиус-вектор элементарной массы dm относительно центра тяготения С, гg -удаление поверхности планеты от центра C. Введя еще r0 - радиус-вектор центра масс тела S относительно С, следовательно [3]:
 ;
;
где
 - гравитационная постоянная для
рассматриваемой планеты, равная
- гравитационная постоянная для
рассматриваемой планеты, равная
 .
.
Проекции гравитационного момента на оси триэдра ОXoYoZo, будут равны:
 ;
(3.18)
;
(3.18)
где D и F-центробежные моменты инерции тела S, определяемые для системы
осей ОXоYоZo.
Полученные для гравитационного момента выражения говорят о том, что вектор этого момента всегда лежит в плоскости местного горизонта (перпендикулярен к местной вертикали СО) [1, 4, 10]. Кроме того, очевидно, что гравитационный момент для тела, главные центральные оси инерции которого в данное мгновение совпадают с орбитальными, равен нулю (так как в этом случае D=F=0), в частности он всегда равен нулю для тела, эллипсоид инерции которого является сферой.
В общем случае главные центральные оси инерции тела могут быть повернуты произвольным образом относительно орбитальных осей ориентации. Обозначим жестко связанный с телом S триэдр, совпадающий с главными центральными осями инерции, через Охуz, а для орбитальных осей сохраним обозначение OXoYoZo. Взаимное положение этих систем координат определим следующей таблицей направляющих косинусов:
 .
.
Найдем проекцию гравитационного момента на ось Ох. Очевидно, что
 .
(3.19)
.
(3.19)
Воспользовавшись свойством направляющих косинусов, преобразуем равенство (3.19) с учетом формул (3.18):
 ;
(3.20)
;
(3.20)
поскольку триэдр Oxyz совпадает с главными центральными осями инерции, постольку все центробежные моменты инерции в этих осях будут равны нулю, и выражение (3.20) может быть упрощено [1, 3]. Проделав аналогичные выкладки для нахождения проекций гравитационного момента можно, написать:
 (3.21)
(3.21)
Таким образом, гравитационный момент,
действующий вокруг одной из осей триэдра
Oxyz, зависит от разности моментов инерции
относительно двух других осей. Чтобы
сделать анализ полученных выражений
более наглядным, рассмотрим гравитационный
момент, действующий на тело S, при условии,
что оси 0Z и 0Zo
совпадают. Это соответствует повороту
тела S, который можно
назвать поворотом по тангажу, на угол
 (рис. 3.6).
(рис. 3.6).

Рис. 3.6 - Поворот тела вокруг оси Z
При сделанных предположениях
 ,
,

 ;
;
н, следовательно,


 ;
;
Как и надо было ожидать, при
 гравитационный момент обращается в
нуль, поскольку триэдры Охуz
и 0XoYoZo в этом случае
совпадают [1, 3]. При монотонном увеличении
гравитационный момент обращается в
нуль, поскольку триэдры Охуz
и 0XoYoZo в этом случае
совпадают [1, 3]. При монотонном увеличении
 от
гравитационный момент возрастает,
достигает максимума при
от
гравитационный момент возрастает,
достигает максимума при
 ,
затем убывает и вновь становится равным
нулю при
,
затем убывает и вновь становится равным
нулю при
 .
Таким образом, существует два положения
равновесия: при
.
Таким образом, существует два положения
равновесия: при
 и при
.
Однако, из этих положений одно соответствует
статической устойчивости (при малом
изменении
,
возникает момент противоположного
знака), другое – статистической
неустойчивости. Действительно, производная
и при
.
Однако, из этих положений одно соответствует
статической устойчивости (при малом
изменении
,
возникает момент противоположного
знака), другое – статистической
неустойчивости. Действительно, производная
 ;
;
при
и при
имеет разные знаки. Какое из этих двух
положений соответствует статистической
устойчивости, зависит от знака (B-A)
[1, 3, 8]. Условие устойчивости (возникновение
восстанавливающего момента при малом
отклонении)
 реализуется при
для A>B или
при
для B>A,
т.е. в обоих случаях вытянутая ось тела
должна занимать вертикальное положение.
реализуется при
для A>B или
при
для B>A,
т.е. в обоих случаях вытянутая ось тела
должна занимать вертикальное положение.
Таким образом, вытянутое в вертикальном положении тело, обладая статистической устойчивостью по тангажу и крену, является нейтральным по отношению к углу рыскания [1, 3, 4].
3.3 Гироскопический измеритель угловой скорости
Для пересчета векторов сил, моментов и т.д. из одной системы координат в другую необходимо вычислить матрицу перехода, элементами которой являются косинусы углов между осями исходной и повернутой систем координат [1, 3, 21]. Эта матрица определяется последовательностью углов поворота, которые позволяют перейти от одной системы координат к другой. Осуществление такого рода перехода требует не более трех поворотов исходной системы координат. Выбор последовательности углов поворота обычно определяется физическим содержанием задачи [1, 3, 5]. Это могут быть углы, измеренные с помощью приборов системы управления, от которых зависят аэродинамические и другие нагрузки на ЛА и т.д. [1]
Применение направляющих косинусов в космических приложениях обусловлено, прежде всего, тем, что они могут быть непосредственно измерены на борту космического аппарата [5].
1. Сформируем матрицу A [3,3] – переход от ССК к ПСК ГИВУС:
|
ССК |
||||
|
ПСК |
x |
y |
z |
|
|
x |
[1,1] |
[1,2] |
[1,3] |
|
|
y |
[2,1] |
[2,2] |
[2,3] |
|
|
z |
[3,1] |
[3,2] |
[3,3] |
=А
Матрица dА получается вследствие трех элементарных поворотов:
вокруг оси х на А>Д>(1):


Рис.3.7 - Схема поворота первого типа вокруг оси х
Матрица направляющих косинусов:
 ;
;
вокруг оси y на А>Д>(2):


Рис. 3.8 - Схема поворота второго типа вокруг оси у
Матрица направляющих косинусов:
 ;
;
вокруг оси z на А>Д>(3):


Рис. 3.9 - Схема поворота третьего типа вокруг оси z
Матрица направляющих косинусов:
 ;
;

Так как
 ,
то :
,
то :
 .
.
2. Сформируем матрицу [6,3] – переход от ПСК ГИВУС к ЧЭ:
|
ПСК |
|||
|
оси |
x |
y |
z |
|
1 |
[1,1] |
[1,2] |
[1,3] |
|
2 |
[2,1] |
[2,2] |
[2,3] |
|
3 |
[3,1] |
[3,2] |
[3,3] |
|
4 |
[4,1] |
[4,2] |
[4,3] |
|
5 |
[5,1] |
[5,2] |
[5,3] |
|
6 |
[6,1] |
[6,2] |
[6,3] |
 (
( )
)
3. Сформируем матрицу A>m>[3,3] погрешностей установки ГИВУС в ССК:
 .
.
Матрица А>m>
получается, если предположить что

4. Сформируем матрицу D>>[6,3] - переход от CСК к ЧЭ:
D>>=*A*AD>m>.
5. Определяется время точностной готовности MGOT.
6. Вычислим угловой уход.

где [k] – угол ухода;
>pr>[k] – значение угла ухода, соответствующее предыдущему такту;
>> - паспортизируемый уход;
>> - погрешность паспортизации;
 - математическое ожидание;
- математическое ожидание;
 - среднеквадратичное отклонение
случайного ухода;
- среднеквадратичное отклонение
случайного ухода;
NORM( )
– случайная составляющая, отвечающая
нормальному закону распределения.
)
– случайная составляющая, отвечающая
нормальному закону распределения.
7. Приведем измеренный сигнал к осям ЧЭ:
 ,
,
где
 - угол поворота объекта, приведенный к
осям ЧЭ (вектор,
- угол поворота объекта, приведенный к
осям ЧЭ (вектор,
 );
);
 - угол поворота объекта.
- угол поворота объекта.
8. Учет углового ухода, шума измерений и переходного процесса при достижении готовности ЧЭ [21]:

где [k] – интеграл, измеренный ЧЭ;
pr[k] - интеграл, измеренный ЧЭ на предыдущем такте;
BSH[k] – «белый шум», распределенный по нормальному закону;
BSTR[k] – шум, создаваемый системой термостатирования;
А>PER> – величина помехи в переходном процессе;
MGOT – время готовности;
NGOT – счетчик готовности k-го ЧЭ.
 .
.
9. Определим число импульсов [6, 10, 14].
Для k=1...6:

где U[k] – промежуточная переменная;
 - сумма импульсов k-го ЧЭ
за все такты;
- сумма импульсов k-го ЧЭ
за все такты;
 - промежуточное значение цены импульсов;
- промежуточное значение цены импульсов;
 - промежуточное значение погрешности
цены импульсов.
- промежуточное значение погрешности
цены импульсов.

где  - сумма импульсов k-го ЧЭ
за такт;
- сумма импульсов k-го ЧЭ
за такт;
Ent{…} – операция выделения целой части.
 .
.
4 АЛГОРИТМЫ ОБРАБОТКИ ИНФОРМАЦИИ И КОНТРОЛЯ СУО И СТАБИЛИЗАЦИИ КА
4.1 Синтез наблюдателя Льюинбергера
Рассмотрим объект, описываемый уравнениями [7, 22]:
 (4.1)
(4.1)
 (4.2)
(4.2)
где х – n-мерный вектор состояния;
u – m-мерный вектор детерминированных (доступных измерению) входных сигналов;
А, В, Н – матрицы размеров nxn, nxm, 1xn.
Предполагая, что известны как измеренные величины скалярный входной сигнал z, матричный входной сигнал u(t) и матрицы объекта А, В, Н, произведем синтез устройства для наблюдения вектора состояния объекта х [7, 22].
Пусть
 – оценочное значение вектора х, тогда,
согласно (4.2),
оценочное значение выходного сигнала
– оценочное значение вектора х, тогда,
согласно (4.2),
оценочное значение выходного сигнала
 .
Оценка
содержит ошибку, если
.
Оценка
содержит ошибку, если
 отличается от значения, полученным
реальным измерением сигнала z.
задача заключается в том, чтобы ошибку
оценивания
отличается от значения, полученным
реальным измерением сигнала z.
задача заключается в том, чтобы ошибку
оценивания
 свести к нулю. [7, 16, 22]
свести к нулю. [7, 16, 22]
Зная u(t) А, В и начальное значение x(t>0>) можно оценить x(t), если подвести сигнал u(t) к электронной модели объекта
 (4.3)
(4.3)
где x(t>0>) задано.
Недостаток оценивающего устройства
(4.3) состоит в том, что он действует по
разомкнутому циклу [7, 16, 22]. Поскольку
данные об u(t)
А, В - неточны, то после некоторого времени
работы это устройство будет давать
слишком неточную оценку вектора х. Чтобы
при сохранении линейности данного
устройства устранить отмеченный
недостаток, было предложено ошибку
 ввести в каждое из уравнений системы
(4.3), т.е. перейти к оценивающему устройству
(4.4) [22]:
ввести в каждое из уравнений системы
(4.3), т.е. перейти к оценивающему устройству
(4.4) [22]:
 (4.4)
(4.4)
где

Устройство, описываемое уравнением (4.4), производит оценку вектора х по замкнутому циклу и называется наблюдающим устройством идентификации или фильтром Льюинбергера [7, 16, 22].
Если ошибку оценивания определить как (4.5)
 (4.5)
(4.5)
то эту ошибку можно находить из уравнения (4.6):
 (4.6)
(4.6)
получаемого вычитанием уравнения (4.1)
из уравнения (4.4). Выбрав коэффициенты
усиления
 так, чтобы система (4.6) была устойчивой,
получим
так, чтобы система (4.6) была устойчивой,
получим
 при
при
 .
Другими словами, с ростом t
оценка
.
Другими словами, с ростом t
оценка
 стремится к оцениваемому вектору х(t)
[7 , 16].
стремится к оцениваемому вектору х(t)
[7 , 16].
Если по измеренному сигналу z(t)
объект (4.1) полностью наблюдаем, то
выбором коэффициентов
можно замкнутой системе (4.4) придать
любое желаемое распределение корней,
т.е. можно синтезировать наблюдающее
устройство идентификации. Если же по
выходному сигналу z(t)
вектор состояния объекта х наблюдаем
не полностью, то с помощью начальных
условий можно оценить лишь наблюдаемую
часть вектора состояния [22].
4.2 Алгоритм оценки угловой скорости
Построим систему оценки угловой скорости.
Имеем систему уравнений [1, 3]:
 (4.7)
(4.7)
где
 - проекции мгновенной угловой скорости
объекта на оси ССК,
- проекции мгновенной угловой скорости
объекта на оси ССК,
 -
моменты инерции объекта,
-
моменты инерции объекта,
 -
управляющий и возмущающий моменты
соответственно,
-
управляющий и возмущающий моменты
соответственно,
i = x, y, z.
Вектор моментов является функцией
 .
Таким образом, имеется три уравнения,
связывающие шесть независимых функций
.
Таким образом, имеется три уравнения,
связывающие шесть независимых функций
 .
.
Получим еще три уравнения при помощи кинематических уравнений, которые в кватернионной форме имеют вид [5]:
 (4.8)
(4.8)
Для малых углов имеем:
 (4.9)
(4.9)
Запишем уравнения (4.7) с учетом (4.9):
 (4.10)
(4.10)
Для построения системы оценки примем следующую модель объекта наблюдения:

где
 - оцениваемое приращение угла поворота,
- оцениваемое приращение угла поворота,
u – вектор управления.
Пусть производится измерение приращения угла поворота >j>:

где
 - фактический угол поворота объекта за
такт БЦВМ.
- фактический угол поворота объекта за
такт БЦВМ.
Матрица Н из уравнения (4.8) имеет вид: [1 0 0].
Модель системы наблюдения (4.10) представим в форме Коши:

Тогда система (4.10) примет вид:
 (4.11)
(4.11)
т.е. в векторной форме получим уравнение (4.7), где

Вектор состояния x(t) определяется решением векторно-матричного уравнения (4.7):

где Ф(t, t>0>) – фундаментальная матрица, являющаяся переходной для (4.7).
Ф(t, t>0>) = еА(t - t0) (4.12)
Найдем еА(t - t0) используя преобразование Лапласа.

Найдем Ф-1(s):
detФ(s) = S3,

Выполняя обратное преобразование Лапласа, получим фундаментальную матрицу системы (4.12):

Уравнение, оценивающее вектор х, имеет вид [5, 16, 22]:

При малом периоде квантования Т вектор x(t) – линейная функция времени, следовательно [16]:

Пренебрегая Т2, решение системы (4.11) запишем [7]:
 (4.13)
(4.13)
Модель объекта наблюдения будет иметь вид [7, 16, 22]:

Найдем коэффициенты k>1>, k>2>, k>3>.
Вычитая уравнения (4.11) из уравнений (4.13), получим [7, 16, 22]:



Запишем характеристическое уравнение для этой системы:
 (4.14)
(4.14)
Пусть для системы оценки угловой скорости
желательны равные отрицательные корни:
 Тогда желаемый характеристический
полином примет вид:
Тогда желаемый характеристический
полином примет вид:
 (4.15)
(4.15)
Приравнивая коэффициенты при одинаковых степенях S в уравнениях (4.14)и (4.15), получим [7, 16, 22]:

Произведем аналитическое обоснование выбора коэффициентов усиления алгоритма оценки угловой скорости.
Рассмотрим характеристическое уравнение [16, 22]:

Приведем его к нормированному виду. Для этого разделим все члены на К>3> и введем новую переменную

Получим


На плоскости параметров А и В построим границу устойчивости. Условия устойчивости имеют вид:
A > 0, B > 0, AB > 1.
Уравнение границы устойчивости имеет вид:
АВ = 1 при A > 0 и B > 0.
Выделим в области устойчивости части, соответствующие различному расположению корней характеристического уравнения [7, 16, 22].
В точке А=В=3 характеристическое уравнение имеет три равных корня q>1>=q>2>=q>3>=1. При этом для исходного уравнения получим:

Построим области апериодических процессов (все три корня вещественные - III) и колебательных процессов (один корень вещественный и два комплексных). Причем во втором случае будем различать область, где пара комплексных корней лежит ближе к мнимой оси, чем вещественный - I, и область, где вещественный корень лежит ближе к мнимой оси, чем пара комплексных - II.
В соответствии с методикой границы указанных областей описываются уравнениями:
- кривые CE, CF:

- кривая CD:

На плоскости К>1>К>2> для фиксированного К>3> построим области различного расположения корней внутри каждой части области устойчивости (см. рис. 2.1).
На рис. 4.1 точками A, B, C, D, E показаны значения коэффициентов алгоритма оценки угловой скорости, используемые при моделировании. Численные значения коэффициентов при моделировании выбирались из различных участков (I, II, III) области устойчивости.

Рис. 4.1 - Значения коэффициентов алгоритма оценки угловой скорости
4.3 Алгоритм обработки и контроля информации ГИВУС
Включение ГИВУС производится в режиме ВКЛ.
В режиме ВКЛ после наступления тепловой готовности включаются все шесть ЧЭ ГИВУС. После достижения функциональной готовности (22 мин с момента включения прибора) производится контроль работоспособности ЧЭ и в случае нормы два ЧЭ отключаются. Эти ЧЭ находятся в «горячем» резерве и в случае необходимости могут быть готовы к работе спустя 1 минуту [21].
Задача обработки и контроля информации ГИВУС состоит из следующих алгоритмов [1, 3, 21]:
1. Алгоритм начальной установки задачи ГИВУС.
2. Алгоритм выбора конфигурации включаемых каналов ГИВУС.
3. Алгоритм расчета приращений углов ГИВУС.
4. Алгоритм контроля и формирования признака информативности ГИВУС.
1. Алгоритм начальной установки задачи ГИВУС
Алгоритм рассчитывает матрицу С(6х3) установки шести ЧЭ в приборных осях:
С>i1> = cos(+>i>);
C>i2> = sin(+>i>)cos((i-1)+>i>);
C>i3> = sin(+>i>)sin((i-1)+>i>);
где , - углы установки ЧЭ в ПСК;
>i>, >i> – погрешности углов установки (і = 16).
Алгоритм также производит обнуление внутренних переменных задачи. По полетному заданию (ПЗ) (параметр IZGIV*) выбирается число включаемых в режиме ЧЭ [21]:
IZGIV*=2 - работа на 5 ЧЭ;
IZGIV*=1 - работа на 4 ЧЭ;
IZGIV*=0 - работа на 3 ЧЭ.
По ПЗ задается признак контроля Zcon:
Zcon = 0 – наличие контроля;
Zcon = 1 – отсутствие контроля.
Алгоритм разовый, работает на первом такте каждого режима.
2. Алгоритм выбора конфигурации включаемых каналов ГИВУС
Алгоритм работает на тех тактах режима, где происходит смена работающего комплекта чувствительных элементов (ЧЭ), функционально при возникновении отказа или по ПЗ [1, 3, 21].
Алгоритм состоит из трех частей, соответствующих трем состояниям признака работы IZGIV*=0V1V2.
При IZGIV*=2 алгоритм формирует пятерку работающих ЧЭ из числа исправных. Из этой пятерки выбирается ортогональная управляющая тройка ЧЭ для формирования матрицы управления В(3х3). Если номера работающих ЧЭ выбираются по ПЗ, то управляющей тройкой считаются первые три из заданных.
При IZGIV*=1 из числа исправных ЧЭ выбираются номера четырех ЧЭ: 3 из них считаются управляющими, а четвертый используется для контроля. Выбор четверки по ПЗ осуществляется аналогично случаю IZGIV*=2.
При IZGIV*=0 выбор работающих измерительных каналов осуществляется аналогично случаю работы на четырех ЧЭ, отличие состоит в том, что контрольный ЧЭ не формируется [21].
Алгоритм ЧЭ формирует запросы на включение ЧЭ IPVG(i)=1 после определения их номеров [21].
В результате формируется управляющая матрица В(3х3), используемая в расчетах проекций приращений углов на приборные оси. Для этого формируется вспомогательная матрица D(3х3), составленная из строк матрицы С(6х3), соответствующих номерам управляющих ЧЭ. Управляющая матрица рассчитывается следующим образом [21]:
B = D-1.
Алгоритм тактированный, работает с тактом То=0,1 с.
3. Алгоритм расчета приращений углов
Алгоритм формирует суммарные признаки функциональной и точностной готовности ГИВУС по признакам, приходящим из подсистемы. Осуществляет выбор диапазона измерений ГИВУС по признаку ППД, формируемому алгоритмами режимов [5 ,21].
Алгоритм формирует информацию о
приращениях углов, измеренных каждым
ЧЭ
 :
:
 (i=16),
(i=16),
где m>i> – цена импульса і-го ЧЭ ГИВУС;
N>i> – число импульсов с і-го ЧЭ за такт;
>>>i> – паспортизуемый уход і-го ЧЭ.
Рассчитываются приращения углов [5, 7] поворота объекта в проекциях на приборные оси ГИВУС >gj>> >:
 ,
,
где В>jk> – элементы матрицы управления;
nupr>k> – номера управляющих ЧЭ ГИВУС (j=13; k=13).
Затем вычисляются проекции приращений углов на оси визирной системы координат (ВСК) j:



где AD>j> – погрешности установки ПСК ГИВУС относительно ВСК;
>yxj> – вычисленный на борту угловой уход (j=13).
Алгоритм тактированный, работает с тактом То=0,1 с.
4. Алгоритм контроля ГИВУС
Контроль осуществляется при условии IZCON=0.
Алгоритм рассчитывает приращение угла по контрольной оси и сравнивается с приращением, полученным с контрольного ЧЭ [21]:
>k> = C>ncon,1>>g1> + C>ncon,2>>g2> + C>ncon,3>>g3>
|>k> ->ncon>|<>p>
где ncon – номер контрольного ЧЭ;
>p> – порог контроля информации.
Если разность не превышает порог >p>, заданный в ПЗ, то все включенные ЧЭ считаются исправными. В противном случае для идентификации отказавшего ЧЭ алгоритм формирует заявку на подключение пятого ЧЭ. После достижения им точностной готовности происходит идентификация отказавшего ЧЭ следующим образом: из 5 задействованных ЧЭ формируется 5 групп по 4 ЧЭ в каждой. Для каждой группы вычисляется скалярное рассогласование между показаниями этих ЧЭ. При наличии отказов рассогласование превышает порог >p> и формируется признак ненормы. Поскольку каждый из 5 включенных ЧЭ входит в 4 группы, то при одном отказавшем ЧЭ ненорма рассогласования возникает в 4-х случаях. Для той группы, куда не вошел отказавший ЧЭ, рассогласование будет в норме [21].
Признаку отказа с номером неисправного ЧЭ присваивается значение 1 и спустя время задержки на формирование признака неисправности, заданное в ПЗ, выдается заявка на его отключение.
Если ненорма рассогласования возникла не в 4-х случаях или ненорма возникла при работе на 4 ЧЭ, когда 2 ЧЭ отказали ранее, то формируется признак ненормы контроля, идущий в телеметрию и никаких решений автономно не принимается.
Алгоритм формирует признак смены работающего комплекта ЧЭ IPSM=1.
При отсутствии точностной готовности прибора, или при количестве отказавших ЧЭ, большем 3, или на время переключения диапазонов, или на время подключения 5-го ЧЭ для идентификации отказа формируется IGIV=0. Иначе прибор считается информативным.
На время отсутствия информативности ГИВУС рассчитывается прогнозируемое приращение угла поворота объекта за такт, которое поступает в алгоритм оценки скорости [21]:
 ,
,
где  - оценочная эффективность исполнительных
органов;
- оценочная эффективность исполнительных
органов;
n – номер такта.
Алгоритм тактированный, работает с тактом То=0,1 с.
Расчет суммарной погрешности
Рассчитаем суммарную погрешность
 для ЧЭ ГИВУС 1, 3, 5, 6 в виде:
для ЧЭ ГИВУС 1, 3, 5, 6 в виде:
 ;
(4.16)
;
(4.16)
где
 - погрешность цены импульса;
- погрешность цены импульса;
 - погрешность случайного ухода;
- погрешность случайного ухода;
 - погрешность, обусловленная ошибками
установки.
- погрешность, обусловленная ошибками
установки.
Пусть скорость направлена по оси 6-го ЧЭ.
Матрица установки С (6х3) имеет вид:
 ;
(4.17)
;
(4.17)
Элементы матрицы С определяются выражениями:
 (4.18)
(4.18)
После тригонометрических преобразований
и предположения, что
 ,
выражения (4.18) будут иметь
вид, соответственно:
,
выражения (4.18) будут иметь
вид, соответственно:
 (4.19)
(4.19)
Определим составляющие выражения (4.16).
Вычислим
- погрешность цены импульса.
Пусть с ГИВУС поступают выходные импульсы N>i> (i = 1, 3, 5, 6):
 (4.20)
(4.20)
где  – приращение угла поворота объекта
вокруг оси чувствительности i-го
– приращение угла поворота объекта
вокруг оси чувствительности i-го
ЧЭ ГИВУС за такт;
 – реальная цена импульсов i-го
ЧЭ ГИВУС;
– реальная цена импульсов i-го
ЧЭ ГИВУС;
[…] – операция выделения целой части.
В алгоритме обработки информации ГИВУС приращение угла поворота объекта за такт вычисляется по формуле [7]:
 (4.21)
(4.21)
где  - алгоритмическая цена импульсов i-го
ЧЭ ГИВУС, взятая из ПЗУ или ПЗ.
- алгоритмическая цена импульсов i-го
ЧЭ ГИВУС, взятая из ПЗУ или ПЗ.
Подставляя величину
в виде [7, 16, 21, 22]:

где
 - ошибка знания реальной цены импульсов
ГИВУС, и полагая в (4.3.5)
- ошибка знания реальной цены импульсов
ГИВУС, и полагая в (4.3.5)
 в данный момент времени, из (4.18)
получим [16]:
в данный момент времени, из (4.18)
получим [16]:

где  - ошибка в вычислении приращения угла
- ошибка в вычислении приращения угла
 в алгоритме обработки информации ГИВУС,
определяемая по формуле [22]:
в алгоритме обработки информации ГИВУС,
определяемая по формуле [22]:
 (4.22)
(4.22)
Контрольную разность можно представить в виде [7]:
 (4.23)
(4.23)
Т.к. ошибки
случайны и независимы между собой,
получим [21]:
 (4.24)
(4.24)
где  - ошибка в вычислении приращения угла
поворота в ПСК ГИВУС, которая вычисляется
по формуле [7, 16, 21]:
- ошибка в вычислении приращения угла
поворота в ПСК ГИВУС, которая вычисляется
по формуле [7, 16, 21]:
 (4.25)
(4.25)
где В(j, i) – матрица управления, которая имеет вид:
 ,
,
 ,
,
 .
.
После подстановки в (4.25)
численных значений и некоторых
предположений, мы получим значение
погрешности от цены импульса
.
2. Вычислим
- погрешность случайного ухода.
В данном случае имеем [7, 21, 22]:
 (4.26)
(4.26)
тогда после подстановки в (4.24)
(4.25) и с учетом (4.26)
мы получим значение погрешности от
случайного ухода
.
3. Приведем методику вычисления
- погрешности, обусловленной ошибками
установки
Данная погрешность вычисляется по формуле [7 ,16]:

4.4 Алгоритм стабилизации
В правых частях динамических уравнений
(1.1) стоят проекции вектора главного
момента всех внешних сил М, действующих
на корпус космического аппарата :
 .
.
Характерной особенностью момента
управления
является активность, он появляется в
результате включения вспомогательных
органов (в частности реактивных двигателей
стабилизации), и исчезает при их
отключении. Момент
,
следует логике теории автоматического
управления, и обеспечивает заданное
угловое движение корпуса космического
аппарата [1, 3].
Источником внешнего возмущающего
момента
 ,
является взаимодействие с внешней [1,
4, 6, 10, 12] средой, приводящее к появлению
действующих на корпус внешних сил –
гравитационного, аэродинамического,
светового, магнитного и др. Будем
рассматривать гравитационный и
аэродинамический моменты. Другие
моменты не будем рассматривать в силу
их малости.
,
является взаимодействие с внешней [1,
4, 6, 10, 12] средой, приводящее к появлению
действующих на корпус внешних сил –
гравитационного, аэродинамического,
светового, магнитного и др. Будем
рассматривать гравитационный и
аэродинамический моменты. Другие
моменты не будем рассматривать в силу
их малости.
Момент
имеет две составляющих –
(создаваемую реактивными двигателями),
и
(создаваемым моментным магнитоприводом
и др. Будем рассматривать только
).
Важным свойством динамической системы ориентации является: если осями ориентации являются поступательно движущиеся оси, то при соответствующем законе управления вместо сложных пространственных поворотов космического аппарата можно изучать три независимых плоских угловых движения, что мы и сделаем в системе, т.е.:
 (4.27)
(4.27)
получено три независимых уравнения.
Пусть двигатели работают в импульсном режиме [1, 4, 6, 11, 12]. Зона нечувствительности определяется условием:
 .
(4.28)
.
(4.28)
Для изучения нужного динамического процесса, коэффициенты k в законе управления (Рис. 4.2):
 ;
(4.29)
;
(4.29)
должны быть положительны. Сигнал
управления формируется путем сложения
сигналов датчика угла и датчика угловых
скоростей. Включение двигателей
происходит при
 .
Диаграмма зависимости управляющего
момента
.
Диаграмма зависимости управляющего
момента
 от сигнала
от сигнала
 имеет вид ( рис 4.3 ) [1 ,3 ,
25].
имеет вид ( рис 4.3 ) [1 ,3 ,
25].

Рис. 4.2 - Закон управления
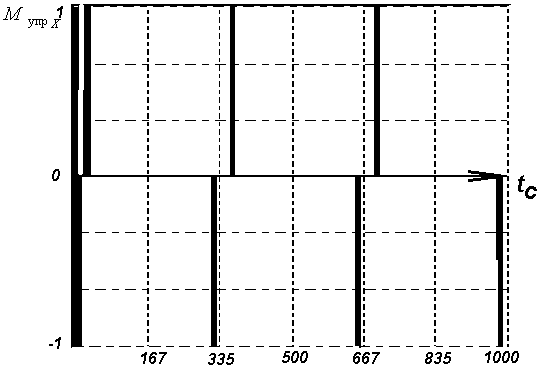
Рис. 4.3 - Изменение управляющего момента со временем в канале X:
Фазовая диаграмма процесса установления
ориентации имеет вид (рис 4.2).
Заштрихованная область – это комбинация
значений
 ,
при которых действует управляющий
момент [6]. Линии
,
при которых действует управляющий
момент [6]. Линии
 являются линиями переключения, т.е. при
пересечении этих линий изображающей
точкой происходит включение (или
выключение) исполнительных органов
системы ориентации. Указанные линии
походят через точки
являются линиями переключения, т.е. при
пересечении этих линий изображающей
точкой происходит включение (или
выключение) исполнительных органов
системы ориентации. Указанные линии
походят через точки
 на оси абсцисс, а их наклон зависит от
коэффициента k [1, 3, 25]:
на оси абсцисс, а их наклон зависит от
коэффициента k [1, 3, 25]:
 ;
(4.30)
;
(4.30)

Рис. 4.4 - Фазовый портрет
Также вводятся дополнительные зоны
нечувствительности:
 ,
, -
нижняя и верхняя линии переключения,
располагающиеся параллельно оси абсцисс.
Они предназначены для «гашения» больших
начальных угловых скоростей [25]. При
пересечении этих линий изображающей
точкой происходит включение (или
выключение) исполнительных органов
системы ориентации. Соответственно
дополнительная зона нечувствительности
находится между
-
нижняя и верхняя линии переключения,
располагающиеся параллельно оси абсцисс.
Они предназначены для «гашения» больших
начальных угловых скоростей [25]. При
пересечении этих линий изображающей
точкой происходит включение (или
выключение) исполнительных органов
системы ориентации. Соответственно
дополнительная зона нечувствительности
находится между
 , и
, и
 .
Фазовый портрет при больших начальных
угловых скоростях приведен на (Рис. 4.5)
.
Фазовый портрет при больших начальных
угловых скоростях приведен на (Рис. 4.5)

Рис. 4.5 - Фазовый портрет с большими начальными угловыми скоростями
Также вводится гистерезис,
 -
предназначенный для гашения шумов при
«скольжении» фазовой диаграммы по линии
переключения с наклоном -1/K
[3].
-
предназначенный для гашения шумов при
«скольжении» фазовой диаграммы по линии
переключения с наклоном -1/K
[3].
Рассмотрим КА как упругое тело [1.3.6.7,9,10,11.12]. Уравнения осцилляторов для упругой модели имеет вид [5]:
 (4.31)
(4.31)
где
 -
коэффициент демпфирования для каждой
отдельно взятой гармоники.
-
коэффициент демпфирования для каждой
отдельно взятой гармоники.
 - квадрат собственной частоты не
демпфированных колебаний для каждой
гармоники.
-
управляющий момент с учетом возможного
отказа. i = 1,2,3,4. Коэффициенты
мы берем из таблицы, приведенной в
Приложении А.
- квадрат собственной частоты не
демпфированных колебаний для каждой
гармоники.
-
управляющий момент с учетом возможного
отказа. i = 1,2,3,4. Коэффициенты
мы берем из таблицы, приведенной в
Приложении А.
При нулевой правой части, мы получаем свободные колебания, зависящие от начальных отклонений, угловых скоростей и др. При ненулевой правой части мы получаем вынужденные колебания, которые накладываются на свободные колебания. Они являются затухающими со временем, в силу коэффициента демпфирования. Прототипом для данной упругой модели послужил маятник на пружинке. Рассматриваемая система является линейной.
Находим, также как для абсолютно твердого тела, угловые скорости, угловые ускорения, с учетом возможных отказов [25, 26].
Введем в имитационную модель космического аппарата наряду с двигателями большой тяги – двигатели малой тяги. Будем рассматривать двигатели дросселированной тяги, т.е. реактивные двигатели могут работать как с большой тягой, так и с малой. Введем дополнительную зону нечувствительности для двигателей большой тяги. Для более эффективного гашения шумов введем паузу по времени при выходе из зон нечувствительности. Для наглядности введем паузу Tp = 3 сек. Тогда, фазовый портрет для упругой модели, с учетом работы двигателей малой тяги и действующих на космический аппарат аэродинамического и гравитационного моментов, имеет вид (рис 4.6). Так как задана достаточно большая пауза, то процесс может, получился неустойчивым. Таким образом, очень важным фактором является правильный выбор паузы [25].

Рис. 4.6 - Фазовый портрет для большой паузы
Разработанный алгоритм позволяет моделировать сложные физические процессы с учетом внешних факторов действующих во время полета космического аппарата [1, 3, 25].
4.5 Решение задачи идентификации отказов
Алгоритм обработки данных в бесплатформенной инерциальной навигационной системе строится с использованием субоптимального дискретного фильтра Калмана [7, 16, 22, 25, 27].
Для малых угловых отклонений осей ССК от БСК и при условии I>x> I>y> I>z> уравнения (1.1) и (1.2) запишем в виде [25]:

Тогда для построения системы оценки вектора состояния (>j>, >j>, m>в>>j>) примем следующую модель объекта наблюдения [16, 22, 27]:
(4.32)
где m>j>=М>ДС>>j>> >/J>j> - эффективность управляющего момента;
М>ДС>>j>> > - управляющий момент ДС;
m>в>>j>=М>в>>j>> >/J>j> - эффективность возмущающего момента;
u>j> - сигнал управления ДС;
j=x, y, z.
Запишем систему уравнений (4.32) в стандартной векторно-матричной форме, дополнив ее уравнением измерений [7]:

где x>j> = (x>1>>j>,> > x>2>>j>,> > x>3>>j>)T=(>j>, >j>, m>в>>j>)T - вектор состояния;
z>j> - вектор измерений;
>j> - шум измерений;
 ,
,
j=x, y, z.
Используя критерий Калмана, несложно показать, что такая система является полностью наблюдаема [7, 16, 22, 25, 26, 27]:
rank[HT ATHT (AT)2HT]=n=3, где n - порядок системы.
Реализация в бортовом вычислителе дискретного фильтра Калмана сводится к оценке вектора состояния по следующим соотношениям [25, 27]:

 (4.33)
(4.33)


где:
 - оценка вектора состояния;
- оценка вектора состояния;
 - переходная матрица для вектора
состояния;
- переходная матрица для вектора
состояния;
 - матрица измерений;
- матрица измерений;
 - ковариационная матрица ошибок
фильтрации;
- ковариационная матрица ошибок
фильтрации;
 - ковариационная матрица ошибок прогноза;
- ковариационная матрица ошибок прогноза;
 - матричный коэффициент усиления;
- матричный коэффициент усиления;
 - ковариационная матрица шумов измерения;
- ковариационная матрица шумов измерения;
j=x, y, z.
Работа алгоритма основана на анализе величины оцениваемого в фильтре Калмана возмущающего момента [25]. Если математическое ожидание оценки возмущающего момента, вычисленного на некоторой временной базе, где управление равно нулю, превосходит допустимый порог, то принимается решение об отказе ДС и переходе на резерв (рис. 4.7) [25].

Рис. 4.7 - Обобщенная структурная схема алгоритма
4.6 Метод статистически гипотез
Статистическая гипотеза - есть некоторое
предположение относительно свойств
[27, 28] генеральной совокупности, из
которой извлекается выборка. Критерий
статистической гипотезы – это правила
позволяющие принять или отвергнуть
данную гипотезу на основании выборки.
При построении такого правила используются
определенные функции результатов
наблюдений
 ,
называемые статическими для проверки
гипотез. Все возможные значения подобных
статистик делятся на две части: если
нет – гипотеза принимается, как не
противоречащая результатам наблюдения,
если да – гипотеза отвергается [27, 28,
29]. При этом всегда возможно совершить
ошибку; различные типы возможных ошибок
заданы в таблице 4.1:
,
называемые статическими для проверки
гипотез. Все возможные значения подобных
статистик делятся на две части: если
нет – гипотеза принимается, как не
противоречащая результатам наблюдения,
если да – гипотеза отвергается [27, 28,
29]. При этом всегда возможно совершить
ошибку; различные типы возможных ошибок
заданы в таблице 4.1:
Таблица 4.1
|
Гипотеза |
Объективно верна |
Объективно неверна |
|
Принимается |
Правильное решение |
Ошибка ll рода |
|
Отвергается |
Ошибка l рода |
Правильное решение |
Вероятность совершить ошибку l рода [8] называется уровнем значимости критерия и обозначается q. Обычно уровень значимости выбирают, равным 0.01; 0.1; 0.05 (последнее значение - наиболее часто) [28].
Критерии значимости – это критерии, с помощью которых проверяют гипотезы об абсолютных значениях параметров или о соотношениях между ними для генеральных совокупностей (с точностью до параметров) функцией распределения вероятностей [29].
Построение гистограммы выборки.
Гистограмма
 является эмпирическим аналогом функции
плотности распределения f(x).
Обычно ее строят следующим образом:
является эмпирическим аналогом функции
плотности распределения f(x).
Обычно ее строят следующим образом:
Находят предварительное количество квантов (интервалов), на которое должна быть разбита ось Ox. Это количество K определяют с помощью оценочной формулы:
K=1+3.2lgN ; (4.34)
Где найденное значение округляют до ближайшего целого числа.
Определяют длину интервала [29]:
 ; (4.35)
; (4.35)
Величину
 можно округлить для удобства вычислений.
можно округлить для удобства вычислений.
Середину области изменения выборки
(центр распределения)
 принимают за центр некоторого интервала,
после чего легко находят границы и
окончательное количество указанных
интервалов так, чтобы в совокупности
они перекрывали всю область от
принимают за центр некоторого интервала,
после чего легко находят границы и
окончательное количество указанных
интервалов так, чтобы в совокупности
они перекрывали всю область от
 до
до
 .
.
Подсчитывают количество наблюдений
 попавшее в каждый квант;
равно числу членов вариационного ряда,
для которого справедливо неравенство
[27-29]:
попавшее в каждый квант;
равно числу членов вариационного ряда,
для которого справедливо неравенство
[27-29]:
 ;
(4.36)
;
(4.36)
здесь
 и
и
 - границы m-ого интервала.
Отметим, что при использовании формулы
(4.36) значения
- границы m-ого интервала.
Отметим, что при использовании формулы
(4.36) значения
 попавшее на границу между (m-1)-м
и m-ом интервалами, относят
к m-ому интервалу.
попавшее на границу между (m-1)-м
и m-ом интервалами, относят
к m-ому интервалу.
Подсчитывают относительное количество
(относительную частоту) наблюдений
/N
, попавших в данный квант.
Строят гистограмму [7, 8,
9], представляющую собой ступенчатую
кривую, значения которой на m-ом
интервале
 ,
(m=1,2,…,K)
,
(m=1,2,…,K)
постоянно и равно
/N,
или с учетом условия
 равно (/N).
равно (/N).
Критерии согласия. Критерием согласия
[8] называется критерий гипотезы о том,
что генеральная совокупность имеет
распределение предполагаемого типа
(например, нормально распределение).
Среди различных критериев согласия
наиболее употребителен универсальный
критерий согласия
 (Пирсона).
(Пирсона).
Проверку гипотезы о виде функции распределения с помощью этого критерия производят следующим образом [27-29]:
a) По выборке строят
гистограмму. Если в каком-либо f-ом
интервале число наблюдений
 окажется меньше пяти, то его объединяют
с соседним интервалом (или интервалами)
так, чтобы число наблюдений в таком
объединенном интервале оказалось
большим или равным пяти. Пусть
окажется меньше пяти, то его объединяют
с соседним интервалом (или интервалами)
так, чтобы число наблюдений в таком
объединенном интервале оказалось
большим или равным пяти. Пусть
 – окончательное число интервала
группирования, тогда очевидно, что
– окончательное число интервала
группирования, тогда очевидно, что
 ;
(4.37)
;
(4.37)
б) Задаются видом гипотетической функции распределения и для каждого из r (r=1,2,…) параметров этого распределения находят оценки, причем эти оценки можно определять как по исходным, так и по сгруппированным данным [27].
в) Определяют теоретическую
вероятность
 попадания в каждый из
интервалов случайной величины с заданным
распределением, параметры которого или
известны или оценены в параграфе б)
[28].
попадания в каждый из
интервалов случайной величины с заданным
распределением, параметры которого или
известны или оценены в параграфе б)
[28].
г) вычисляют число g:
 ; (4.38)
; (4.38)
Известно, что для данного критерия
согласия случайная величина g
при Больших N имеет
распределение
с
-
r - 1 степенями свободы,
где r - число определенных
неизвестных заранее параметров
гипотетического распределения, а
уменьшения числа степеней свободы еще
на единицу объясняется наличием
линейного соотношения (4.35)
между эмпирическими величинами
 и
N , входящими в расчетную
формулу (4.36). Задавшись
уравнением значимости q, по таблице
-распределений
находят критическое значение
и
N , входящими в расчетную
формулу (4.36). Задавшись
уравнением значимости q, по таблице
-распределений
находят критическое значение
 ,
причем критическая область определяется
неравенством g>=
,
причем критическая область определяется
неравенством g>= =-
r – 1;
=-
r – 1; .
.
Сравнивая значения g и
и выносят решение о принятии (g
<=)
или отклонение (g >)
рассматриваемой гипотезы о виде функции
распределения [27-29].
4.7 Алгоритм контроля отказов ДС при неполной тяге
Алгоритм неполной тяги - представляет собой алгоритм позволяющий моделировать остаточную тягу при отказе одного из реактивных двигателей стабилизации, для отказа типа «не отключение». Остаточная тяга может меняться в пределах: 0%-100%. При 0% тяги, отказ типа «не отключение» переходит в отказ типа «не включение». Пусть P – тяга, а k – коэффициент остаточной тяги, задаваемый в процентах. Тогда в общем случае, при отказе одного из двигателей, тяга имеет вид (4.39) [25, 26]:
 (4.39)
(4.39)
Блок-схема алгоритма имеет вид (Рис. 4.8):

Рис. 4.8 - Блок схема алгоритма неполной тяги
В общем случае коэффициент K носит стохастический характер. Блок анализа информации формирует таблицу включений, для алгоритма стабилизации [25].
При функционировании алгоритма контроля мы находим максимальные опасной продолжительности на каждой базе, после чего варьируем начальные условия в пределах 20%. Формируем выборку. Таким же образом мы варьируем параметров для случаев отказа работы двигателей типа «не отключение» и типа «не включение». Начальные варьируемые условия приведены в таблице 4.2.:
Таблица 4.2
|
Wx |
Wy |
Wz |
Gx |
Gy |
Gz |
Ix |
Iy |
Iz |
|
|
N |
1 |
-0.5 |
0.5 |
5 |
10 |
1 |
500 |
1500 |
2000 |
|
N+ |
1.2 |
-0.6 |
0.6 |
6 |
12 |
1.2 |
600 |
1800 |
2400 |
|
N- |
0.8 |
-0.4 |
0.4 |
4 |
8 |
0.8 |
400 |
1200 |
1600 |
где N – это исходные начальные условия, N- параметр варьируемый в сторону уменьшения, N+ параметр варьируемый в сторону увеличения [25].
Упрощенная выборка имеет вид:
Таблица 4.3
|
N |
N- |
N+ |
||
|
Нормальный режим |
264 |
157 |
999 |
|
|
Отказ работы двигателя типа «не отключение» |
1 |
1000 |
1000 |
999 |
|
3 |
1000 |
1000 |
1000 |
|
|
6 |
1000 |
1000 |
999 |
|
|
8 |
999 |
1000 |
1000 |
|
|
Отказ работы двигателя типа «не включение» |
1 |
1000 |
157 |
1000 |
|
3 |
999 |
286 |
1000 |
|
|
6 |
265 |
158 |
999 |
|
|
8 |
264 |
157 |
1000 |
Для наглядности построим гистограмму, и изобразим ее в виде функции – закона распределения, [8, 9, 25-29] для облегчения нахождения критической точки в методе статистических гипотез. Находим математические ожидания. Графики зависимостей приведены на (Рис. 4.9) [27-29]:

Рис. 4.9 – Аппроксимированная гистограмма
Здесь m0 и m1
- математические ожидания. При рассмотрении
левостороннего критерия, получили
критическую точку Gкр =
736. Т.о.
 =Gкр,
если, следуя алгоритму контроля, ОП <
,
то есть основания утверждать, что отказа
в работе двигателя нет, в противном
случае, при попадании значения ОП в
критическую область, т.е. ОП >=
, ПО присваивается значение единицы,
и есть основания утверждать, что отказ
в работе двигателя есть [25].
=Gкр,
если, следуя алгоритму контроля, ОП <
,
то есть основания утверждать, что отказа
в работе двигателя нет, в противном
случае, при попадании значения ОП в
критическую область, т.е. ОП >=
, ПО присваивается значение единицы,
и есть основания утверждать, что отказ
в работе двигателя есть [25].
5 РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
Рассмотрим космический аппарат как упругое тело, описываемое уравнениями (3.1), (3.2), (3.4), (3..5). Рассмотрим режим построения базовой ориентации с учетом внешних возмущающих воздействий – аэродинамического и гравитационного, а также с учетом дрейфа нуля ГИВУС.
Для наглядности функционирования алгоритма стабилизации ДС КА, где в качестве гистерезиса используется пауза по времени, проведем моделирование СУО, с начальными условиями, приведенными в табл. 5.1.
Таблица 5.1
|
Вариант № |
Угловые скорости |
Угловые ускорения |
Моменты инерции |
|
1 |
Wx = 0.5 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
|
2 |
Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
|
3 |
Wx = 3 c-1 Wy = 1 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
|
4 |
Wx = -4 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = -1 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
|
5 |
Wx = 0 c-1 Wy = 3 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
|
6 |
Wx = 0.5 c-1 Wy = 0.5 c-1 Wz = 1 c-1 |
Gx = 0.001 c-2 Gy = 0.001 c-2 Gz = 0.001 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
Функционирование СУО с набором начальных условий варианта 2 табл. 5.1 во временной плоскости представлено на рис. 5.1, рис. 5.2, рис. 5.3.
Функционирование СУО с набором начальных условий варианта 1-6 табл. 5.1 на фазовой плоскости, представлено в приложении Б.
.
Рис. 5.1 – Зависимость угловой скорости от времени в канале X

Рис. 5.2 – Зависимость углового ускорения от времени в канале X
Как показали результаты моделирования (рис. 5.1-5.3), разработанный алгоритм стабилизации при наличии внешних возмущающих воздействий показал высокую эффективность в режиме построения базовой ориентации. Как показало моделирование, наиболее эффективным методом гашения шумов управления, которые возникают в следствии «скольжения» управляющего воздействия по границе области нечувствительности, при реализации логики управления, оказалось введение паузы по времени при выходе из зоны нечувствительности для двигателей малой тяги и зоны нечувствительности двигателей большой тяги. Для более эффективного гашения шумов, а соответственно снижения расхода рабочего тела, были введены в модель упругого КА двигатели малой тяги, с дополнительной зоной нечувствительности в законе управления и дополнительной задержкой по времени. Для сравнения был рассмотрен гистерезис с фиксированной зоной нечувствительности для ДБТ и ДМТ. Эффективность применения меньше по сравнению с паузой по времени, в связи с фиксированной зоной нечувствительности для всего диапазона угловых скоростей.

Рис. 5.3 – Зависимость управляющего момента от времени в канале X
Проведем моделирование СУО с различными наборами коэффициентов фильтра Льюинбергера. Начальные условия модели КА возьмем из 2-ого варианта табл. 5.1. Варианты коэффициентов фильтра Льюинбергера, представлены в табл. 5.2.
Результаты моделирования представлены в приложении В. Как показали результаты моделирования – минимальную погрешность оценивания показал 4-ый вариант наборов коэффициентов фильтра Льюинбергера. Как видно из результатов моделирование, наиболее длительный по времени переходной процесс показал 1-ый набор коэффициентов табл. 5.2 (~40 сек.), последующие наборы, показали тенденцию существенного снижения времени переходного процесса, так 3-ий набор коэффициентов фильтра Льюинбергера, показал (~8 сек.), вместе с тем, такая же тенденция наблюдается и с максимальной погрешностью оценивания. Так для 1-ого набора коэффициентов она составила (~0.01 1/с) , то для 4-ого набора коэффициентов максимальная погрешность оценивания составила (~0.0005 1/c). Следует отметить, что все четыре набора коэффициентов фильтра, были выбраны из области устойчивости рис. 4.2.1. 4-ый набор коэффициентов был найден методом интегральной квадратичной оценки качества, и является наиболее оптимальным, как показали результаты моделирования, для данных НУ взятых из табл. 5.1.
Таблица 5.2 - Коэффициенты фильтра Льюинбергера
|
Вариант№ |
Набор коэффициентов |
||
|
K1 |
K2 |
K3 |
|
|
1 |
0.9 |
0.27 |
0.027 |
|
2 |
3 |
3 |
1 |
|
3 |
6 |
12 |
8 |
|
4 |
20.516 |
149.611 |
0.042 |
.
5.1 Моделирование отказов ГИВУС
Рассмотрим модель гироскопического измерителя вектора угловой скорости, описанной в разделе 3.3 с учетом углов установки и дрейфа нуля.
Рассмотрим пять типов отказов, описанных в табл. 5.3 и проведем соответствующую диагностику отказов ГИВУС. Примем коэффициенты фильтра Льюинбергера постоянными. K1= 6, K2=12, K3= 8. Начальные условия моделируемой системы, представлены в табл. 5.4.
Таблица 5.3 - Описание отказов ГИВУС
|
Тип отказа |
Описание отказа |
|
1 |
Отсутствие выходной информации |
|
2 |
Максимальная информация постоянного знака |
|
3 |
Информация постоянного знака, кратная 750 импульсам |
|
4 |
Максимальная информация с релейным чередованием знака |
|
5 |
Увеличение (уменьшение) цены импульса в 4 раза |
Таблица 5.4 - НУ модели КА
|
Вариант |
Угловые скорости |
Угловые ускорения |
Моменты инерции |
Типы отказов ГИВУС |
Время отказа |
|
1 |
Wx = 0.5 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
2 |
700 сек |
|
2 |
Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
2 |
700 сек |
|
3 |
Wx = 4 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
2 |
700 сек |
|
4 |
Wx = 4 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
2 |
100 сек |
|
5 |
Wx = 4 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
2 |
400 сек |
Результаты моделирования представлены в приложении Г. Как показали результаты моделирования, для контроля отказавшего ЧЭ требуется в среднем (~3 сек.).
5.2 Моделирование отказов ДС
Рассмотрим КА с учетом отказов двигателей стабилизации. Введем в рассмотрение отказы типа «не включения», отказы типа «не отключения» и отказы двигателей с остаточной тягой.
Проведем моделирование с начальными условиями, приведенными в табл.5.5. В таблице также представлено время выявления отказа для данного набора НУ по результата проведенного моделирования.
Таблица 5.5 - НУ модели КА и время выявления отказа
|
Вари-ант |
Угловые скорости |
Угловые ускорен-ия |
Моменты инерции |
Остаточ-ная тяга ДС |
Время отказа |
Время выявле-ния отказа |
|
1 |
Wx = 0.1 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
100% |
700 сек |
704.3 сек |
|
2 |
Wx = 0.1 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
50% |
700 сек |
706.8 сек |
|
3 |
Wx = 0.1 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
15% |
700 сек |
715.2 сек |
|
4 |
Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
100% |
700 сек |
702.1 сек |
|
5 |
Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
50% |
700 сек |
705.3 сек |
|
6 |
Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
15% |
700 сек |
708.9 сек |
|
7 |
Wx = 3 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
100% |
700 сек |
701.2 |
|
8 |
Wx = 3 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
50% |
700 сек |
704.6 сек |
|
9 |
Wx = 3 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
15% |
700 сек |
705.9 сек |
|
10 |
Wx = 0 c-1 Wy = 1 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
100% |
700 сек |
709.2 сек |
|
11 |
Wx = 0 c-1 Wy = 1 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
50% |
700 сек |
714.3. сек |
|
12 |
Wx = 0 c-1 Wy = 1 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
15% |
700 сек |
721.1 сек |
|
13 |
Wx = 0 c-1 Wy = 1 c-1 Wz = 1 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 1 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
100% |
700 сек |
707.5 сек |
|
14 |
Wx = 0 c-1 Wy = 1 c-1 Wz = 1 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 1 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
50% |
700 сек |
711.3 сек |
|
15 |
Wx = 0 c-1 Wy = 1 c-1 Wz = 1 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 1 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
15% |
700 сек |
717.4 сек |
Результаты моделирования представлены в приложении Д. Как показали результаты моделирования, понижение неполной тяги при отказе ДС приводит к увеличению времени идентификации отказов. Моделирование показало также, что существенное повышение уровня шумов измерений не приводит к значительному снижению чувствительности системы к выявлению отказов типа "неотключение" с малой остаточной тягой.
6 ЭКОНОМИЧЕСКАЯ ЧАСТЬ
Достижения научно-технического прогресса в последние десятилетия позволили человечеству решить многие неразрешимые ранее технические и теоретические вопросы. Так, сегодня повседневным явлением стали запуски искусственных спутников Земли, космических аппаратов с человеком на борту, беспилотные межорбитальные аппараты, полёты автоматических станций. Одной из неотъемлемых составляющих космического аппарата – является система управления, включающая в себя командные приборы, исполнительные органы, БЦВМ и программный комплекс. Системы управления, относятся к разряду сложных систем с большим количеством элементов, которые подвержены отказам. Одним из основных требований, предъявляемых к системе управления, является ее высокая надежность. Управление космическим аппаратом с помощью БИНС рассматривается как взаимодействие двух процессов: решение навигационной задачи и решение задачи стабилизации. Первая задача заключается в определение требуемой траектории космического аппарата и в вычислении фактической, вторая – в управлении аппаратом для поддержания требуемого курса с заданной точностью. В БИНС инерциальный координатный базис строится не с помощью гироплатформы, а на основе математических расчетов проводимых в БЦВМ непосредственно в полете. Отказ реактивных двигателей стабилизации системы управления ориентацией космического аппарата, может приводить к не выполнению целевой задачи, а отказ типа «не отключение» двигателя, может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей. Таким образом разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей. В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов.
6.1 Обзор существующих методов
Отказ от использования гиростабилзированной
платформы и перехода к бесплатформенным
инерциальным навигационным системам
связан с повышением точности командных
приборов и интенсивным развитием
цифровой вычислительной техникой, что
позволяет решать задачу построения
базовой ориентации математическими
методами с использованием БЦВМ [1-5].
Наряду с этим значительно повышается
сложность математической модели НКА и
алгоритмов для системы управления
ориентацией. Одной из важных задач,
является идентификация отказов
исполнительных органов СУО. Отказ ДС
типа «не отключение» может привести к
большим потерям рабочего тела и
невыполнению целевой задачи СУО.
Существующий метод идентификации
отказов ДС как большой тяги так и малой,
основан на контроль опасной продолжительности
работы двигателей и подсчете времени
базы
 .
Опасная продолжительность формируется
в зависимости от значения управляющего
момента [25]. При этом рассматривается
два типа отказов – отказ типа «не
включение» и отказ типа «не отключения».
При этом на всех базах выбирается
максимальный ОП и находится с помощью
метода статистических гипотез критическая
точка, позволяющая принять решение –
есть отказ или нет. Максимальная точность
выявлений отказа ДС с остаточной тягой,
при использовании данного метода – 51%
[25]. При превышении этого порога, алгоритм
контроля двигателей стабилизации
системы управления ориентацией
космического аппарат не выявляет отказ.
Это приводит к большим потерям рабочего
тела, а следовательно и к значительным
экономическим затратам, а также к
невыполнению целевой задачи СУ, и как
следствие срыву полетного задания, а
иногда и полной потери управления КА
[25, 26].
.
Опасная продолжительность формируется
в зависимости от значения управляющего
момента [25]. При этом рассматривается
два типа отказов – отказ типа «не
включение» и отказ типа «не отключения».
При этом на всех базах выбирается
максимальный ОП и находится с помощью
метода статистических гипотез критическая
точка, позволяющая принять решение –
есть отказ или нет. Максимальная точность
выявлений отказа ДС с остаточной тягой,
при использовании данного метода – 51%
[25]. При превышении этого порога, алгоритм
контроля двигателей стабилизации
системы управления ориентацией
космического аппарат не выявляет отказ.
Это приводит к большим потерям рабочего
тела, а следовательно и к значительным
экономическим затратам, а также к
невыполнению целевой задачи СУ, и как
следствие срыву полетного задания, а
иногда и полной потери управления КА
[25, 26].
Предлагаемый в данной дипломной работе алгоритм контроля СУО основан на использовании субоптимального дискретного фильтра Калмана-Бьюси. Анализ величины оцениваемого в фильтре Калмана возмущающего момента позволяет вычислить математической ожидание оценки возмущения. Если математическое ожидание оценки возмущающего момента, вычисленного на некоторой временной базе, где управление равно нулю, превосходит допустимый порог, то принимается решение об отказе ДС и переходе на резерв. Как показало моделирование понижение остаточной тяги при отказе ДС в пять раз меньше, чем у существующих алгоритмов контроля, и составляет 10%. Это значительно повышает надежность СУО. А процент не выявления (10%) составляет процент внешних возмущающих воздействий, таких как аэродинамические и гравитационные. Это говорит о высокой эффективности разработанного алгоритма [25, 26].
Также в данной дипломной работе, разработан алгоритм контроля командных приборов ГИВУС и ДУП [21]. Отказ командным приборов может приводить к невыполнению целевой задачи СУ. Существующие алгоритмы имеют высокую погрешность при выявлении отказов чувствительных элементов. В основу существующих алгоритмов положен либо фильтр первого порядка, либо наблюдатель Люинбергера. Для повышения точности выявления отказавшего чувствительного элемента, в данной дипломной работе разработаны алгоритмы контроля командных приборов СУО, на основе субоптимального дискретного фильтра Калмана-Бьюси. Проведенное моделирование, показало высокую эффективность разработанного алгоритма по сравнению с существующими. В результате было повышено время выявления отказа чувствительный элемент, более точно выявляется отказавший чувствительный элемент [21, 25].
Разработанные алгоритмы контроля командных приборов и исполнительных органов в значительной мере повышают надежность системы управления ориентацией космического аппарата, и позволяют избежать потерь рабочего тела, и способствуют выполнению целевой задачи СУ. Это позволит снизить затраты на командные приборы и исполнительные органы, а также экономические затраты связанные с отказами в полете исполнительных органов и командных приборов [1, 3, 25].
6.2 Расчет сметы затрат на НИР
Выполнение научных исследований требует определенных затрат, которые необходимо рассматривать как дополнительные капиталовложения. Они относятся к производственным затратам и включают в себя все работы, выполняемые работниками организации [30].
При этом принимаем:
общее количество часов отладки и решения на ПВЭМ Т = 550 ч.
стоимость 1м2 площади в месяц С>а> = 35 грн.;
мощность ПВЭМ W = 0.4 кВт;
площадь помещения S = 13 м2 ;
стоимость электроэнергии 1 кВт/ч Т>Ф> = 0,156 грн. (с ПДВ);
коэффициент невыходов а = 5%;
стоимость ПВЭМ S>k> = 2900 грн.;
количество рабочих дней в месяц Д>Р> = 23;
время работы на компьютере Т>К> = 4 мес.;
мощность осветительной электроэнергии W>оэ> = 0,18 кВт;
время разработки НИР t>р> = 5 мес.
Рассчитаем эффективный фонд времени:
Т>Э> = Д>Р> * Т>К> *(1-а/100) = 87,4;
Расчет основной заработной платы исполнителей производится исходя из штатного расписания занятости исполнителей этой НИР, и приведен в таблице 6.1.
Расчет стоимости материала приведен в таблице 6.2.
Расчет сметы затрат на НИР с указанием формул расчета статей затрат приведен в таблице 6.3.
Таблица 6.1 – Штатное расписание исполнителей
|
Должность |
Количествоисполнителей |
Оклад вмесяц, грн. |
Времяработы, мес. |
Сумма, грн. |
|
Руководитель, Начальник сектора |
1 |
650 |
5 |
3250 |
|
Инженер-математик исследователь |
1 |
450 |
5 |
2250 |
|
Лаборант |
1 |
300 |
5 |
1500 |
|
Итого |
7000 |
Таблица 6.2 – Расходы на материалы
Наименование |
Цена заединицу, грн. |
Количество, шт. |
Сумма, грн. |
|
Бумага (100 листов) |
5,50 |
2 |
11,00 |
|
Папка для дипломных работ |
3,00 |
1 |
3,00 |
|
Ручка |
1,00 |
7 |
7,00 |
|
Карандаш |
0.50 |
8 |
4,00 |
|
Записывающий CD (запись) |
30 |
3 |
90 |
|
Лист формата А1 |
1,00 |
4 |
4,00 |
|
Картридж для принтера |
155,00 |
1 |
155,00 |
|
Дискета 1,44 МВ |
5,00 |
2 |
10,00 |
|
Итого |
284,00 |
Таблица 6.3 – Смета затрат на НИР
|
№ |
Статья затрат |
Методика расчета |
Сумма,грн. |
|
1 |
Зарплата сотрудников, основная а) штатное расписание б) доплаты |
Таблица 6.2.1 10% пункта 1а) |
7000 700 |
|
2 |
Отчисления на соцстрах и другие отчисления |
37,5% пункта 1 |
2625 |
|
3 |
Расходы на материалы |
Таблица 6.2.2 |
284 |
|
4 |
Затраты на эксперимент |
- |
- |
|
5 |
Стоимость технологической электроэнергии |
S>э.т.> = Т>ф>* Т * W |
34,32 |
|
6 |
Амортизационные отчисления вычислительной техники |
А>отч> = (0,25* S>k>*Т>к>)> >/12 |
242 |
|
7 |
Стоимость осветительной Электроэнергии |
S>o> = Т>ф>> >* Т>э> * W>оэ> |
2.45 |
|
8 |
Амортизационные отчисления площади рабочего места (аренда) |
S>a> = С>а> * S * t>р> |
2275 |
|
9 |
Итого |
Сумма |
13162.77 |
|
9 |
Плановое накопление |
30% пункта 1 |
2100 |
|
10 |
Всего смета затрат на НИР |
15262.77 |
Итого, в результате проведенных расчетов получили, что смета затрат на научно-исследовательскую работу составляет 15262.77 грн.
6.3 Расчет научно-технического эффекта
При расчете научно-технического эффекта используется следующая формула [30]:
 ,
,
где
 - весовые коэффициенты i-ого
показателя;
- весовые коэффициенты i-ого
показателя;
 - виды признаков по i-ому
показателю;
- виды признаков по i-ому
показателю;
Исходные данные для расчета научно-технического экономического эффекта приведены в таблице 6.4.
Таблица 6.4 - Исходные данные для расчета НТЭ
|
№Признака |
Признаки научно-технического уровня |
Значение
|
Значение
|
|
1 |
Перспективность |
0.4 |
8 |
|
2 |
Возможность реализации |
0.1 |
7 |
|
3 |
Новизна |
0.5 |
9 |
Подставляя в исходную формулу соответствующие значения показателей, получим:
НТЭ = 8.4 балла
6.4 Расчет экономического эффекта
Экономический эффект – та выгода, в денежном выражении, которую будет получать предприниматель при внедрении результатов научно-исследовательской работы. Экономический эффект является абсолютной величиной [30].

где i - направление снижения затрат;
 - экономия по каждому направлению;
- экономия по каждому направлению;
 - нормативный коэффициент эффективности
капиталовложений. В данном случае
- нормативный коэффициент эффективности
капиталовложений. В данном случае
 (экономический смысл таков, что возврат
капиталовложений предполагает, что из
вложенной одной гривны вернется 0.25
гривны):
(экономический смысл таков, что возврат
капиталовложений предполагает, что из
вложенной одной гривны вернется 0.25
гривны):
 - капиталовложения (смета затрат на
НИР). В данном случае
- капиталовложения (смета затрат на
НИР). В данном случае
 ;
;
 - дополнительные капиталовложения
(маркетинговые исследования, приобретение
новой вычислительной техники и другие).
- дополнительные капиталовложения
(маркетинговые исследования, приобретение
новой вычислительной техники и другие).
 .
.
В данной дипломной работе рассматриваются экономии по двум основным направлениям:
1. Экономия затрат рабочего тела.
Для данного направления учитывается разница между тем сколько потребляли ДС СУО рабочего тела до внедрения нового алгоритма контроля, и сколько буду потреблять рабочего тела после внедрения в СУО нового алгоритма контроля:
 ;
;
 - масса потребления ДС рабочего тела до
внедрения нового алгоритма контроля;
- масса потребления ДС рабочего тела до
внедрения нового алгоритма контроля;
 - масса потребления ДС рабочего тела
после внедрения нового алгоритма
контроля.
- масса потребления ДС рабочего тела
после внедрения нового алгоритма
контроля.
Тое есть, исходя из того, что масса потребления ДС рабочего тела после внедрения нового алгоритма контроля снизится в пять раз, то:
 ;
;
Также необходимо учесть стоимость рабочего тела (топлива):

Следовательно, экономия по первому направлению:

2. Экономия затрат рабочего тела связанная с временам выявления отказов чувствительных элементов ГИВУС.
Для данного направления учитывается разница между тем сколько времени требуется алгоритму контроля ГИВУС на выявление отказа ЧЭ до внедрения нового алгоритма, и после внедрения нового алгоритма контроля ГИВУС.

 - времени, которое требуется алгоритму
контроля ГИВУС для выявление отказа ЧЭ
до внедрения нового алгоритма контроля;
- времени, которое требуется алгоритму
контроля ГИВУС для выявление отказа ЧЭ
до внедрения нового алгоритма контроля;
 - времени, которое требуется алгоритму
контроля ГИВУС для выявление отказа ЧЭ
после внедрения нового алгоритма
контроля;
- времени, которое требуется алгоритму
контроля ГИВУС для выявление отказа ЧЭ
после внедрения нового алгоритма
контроля;
Мы можем вычислить массу потребления топлива за одну секунду:

- масса потребления ДС рабочего тела;
Таким образом разница выявления отказа:

А потребления топлива за одну секунду

Также необходимо учесть стоимость рабочего тела (топлива):
Следовательно, экономия по первому направлению:

В результате проведенных расчетов получим следующий экономический эффект:

Экономический эффект величина относительная и рассчитывается по формуле [30]:

где
 - экономический эффект,
- капиталовложения
- экономический эффект,
- капиталовложения

Срок окупаемости капиталовложений:
 :
:
Следовательно срок окупаемости капиталовложений:

6.5 Заключение
В данной дипломной работе экономически обоснована разработка алгоритма контроля реактивных двигателей стабилизации системы управления космического аппарата и алгоритма контроля командных приборов СУО. Рассчитаны смета затрат на НИР, научно-технический эффект, экономический эффект и срок окупаемости капиталовложений. Совершенствование алгоритмов контроля осуществляется за счёт использования современной аппаратуры и развития научно-технического прогресса, а также за счёт более совершенных алгоритмов, которые используют комплексную обработку имеющейся информации [25, 30].
Результаты обоснований приведены в таблице 6.5:
Таблица 6.5 - Технико-экономические показатели НИР
|
№ п/п |
Наименование показателей |
Методика расчета |
Величина |
|
1. |
Смета затрат на НИР |
Сумма статей затрат |
15262.77 |
|
2. |
Научно-технический эффект |
|
8.4 балла |
|
3. |
Экономический эффект |
|
3328.38 грн |
|
4. |
Срок окупаемости инвестиций |
|
4.5 года |

7 ГРАЖДАНСКАЯ ОБОРОНА
Гражданская оборона Украины — составная часть системы общегосударственных оборонных мероприятий, проводимых в мирное и военное время в целях защиты населения и народного хозяйства от оружия массового поражения и других современных средств нападения противника, а также для спасательных и неотложных аварийно-восстановительных работ в очагах поражения и зонах катастрофического затопления. В данной дипломной работе рассматривается воздействие проникающей радиации и радиационного заражения [31, 32].
Основные задачи гражданской обороны:
1. Защита населения от оружия массового поражения и других средств нападения противника осуществляется проведением комплекса защитных мероприятий, что позволяет максимально ослабить результаты воздействия оружия массового поражения, создать благоприятные условия для проживания и деятельности населения, работы объектов и действий сил гражданской обороны при выполнении стоящих перед ними задач.
Повышение устойчивости работы объектов и отраслей народного хозяйства в условиях военного времени может быть достигнуто заблаговременным проведением организационных, инженерно-технических и других мероприятий, направленных на максимальное снижение результатов воздействия оружия массового поражения, создание благоприятных условий для быстрой ликвидации последствий нападения противника.
Проведение спасательных и неотложных аварийно восстановительных работ в очагах поражения и зонах затопления. Без успешного проведения таких работ невозможно наладить деятельность объектов, подвергающихся ударам противника, создать нормальные условия для жизнедеятельности населения пострадавших городов [31].
Проникающая радиация. Это один из поражающих факторов ядерного оружия, представляющий собой гамма-излучение и поток нейтронов, испускаемых в окружающую среду из зоны ядерного взрыва. Кроме гамма-излучения и потока нейтронов выделяются ионизирующие излучения в виде альфа- и бета-частиц, имеющих малую длину свободного пробега, вследствие чего их воздействием на людей и материалы пренебрегают. Время действия проникающей радиации не превышает 10—15 сек. с момента взрыва [32].
Основные параметры, характеризующие ионизирующие излучения,— доза и мощность дозы излучения, поток и плотность потока частиц.
Ионизирующая способность гамма-лучей характеризуется экспозиционной дозой излучения. Единицей экспозиционной дозы гамма-излучения является кулон на килограмм (Кл/кг). Согласно стандарту, кулон на килограмм — экспозиционная доза рентгеновского и гамма-излучений, при которой сопряженная корпускулярная эмиссия на 1 кг сухого атмосферного воздуха производит в воздухе ионы, несущие заряд в один кулон электричества каждого знака. На практике в качестве единицы экспозиционной дозы применяют несистемную единицу рентген (Р). Рентген — это такая доза (количество энергии) гамма-излучения, при поглощении которой в 1 см3 сухого воздуха (при температуре О С° и давлении 760 мм рт. ст.) образуется 2,083 миллиарда пар ионов, каждый из которых имеет заряд, равный заряду электрона, 1Р=2,58-10~4 Кл/кг; 1 Кл/кг = ^3876 Р или 1 Кл/кгя^3900 Р. Дозе 1 P соответствует поглощение 1 г воздуха 88 эрг энергии (8,8хЮ~3 Дж/кг), а 1 г биологической ткани —93 эрг (9,3х10~3 Дж/кг) [31, 32].
Единица мощности экспозиционной дозы — ампер на килограмм (А/кг), рентген в секунду (Р/с) и рентген в час (Р/ч). Ампер на килограмм равен мощности экспозиционной дозы, при которой за время, равное одной секунде, сухому атмосферному воздуху передается экспозиционная доза кулон на килограмм:
1 Р/с=2,58*10-4 А/кг; 1 А/кг=3876 Р/с или 1 А/кг≈3900 Р/с = 14*106 Р/ч; 1 Р/ч = 7,167-10-8 А/кг. Процесс ионизации атомов нейтронами отличен от процесса ионизации гамма-лучами. Поток нейтронов измеряется числом нейтронов, приходящихся на квадратный метр поверхности,— нейтрон/м2. Плотность потока — нейтрон/м2*с.
Степень тяжести лучевого поражения главным образом зависит от поглощенной дозы. Для измерения поглощенной дозы любого вида ионизирующего излучения Международной системой измерений «СИ» установлена единица Грэй (Гр); в практике применяется несистемная единица — рад. Грэй равен поглощенной дозе излучения, соответствующей энергии 1 Дж ионизирующего излучения любого вида, переданной облучаемому веществу массой 1 кг. Для типичного ядерного взрыва один рад соответствует потоку нейтронов (с энергией, превышающей 200 эВ) порядка 5*1014 нейтрон /м2 : 1 Гр = 1 Дж/кг = 100 рад=10000 эрг/г [31].
Распространяясь в среде, гамма-излучение и нейтроны ионизируют ее атомы и изменяют физическую структуру веществ. При ионизации атомы и молекулы клеток живой ткани за счет нарушения химических связей и распада жизненно важных веществ погибают или теряют способность к дальнейшей жизнедеятельности [32].
Поражение людей и животных проникающей радиацией. При воздействии проникающей радиации у людей и животных может возникнуть лучевая болезнь. Степень поражения зависит от экспозиционной дозы излучения, времени, в течение которого эта доза получена, площади облучения тела, Общего состояния организма. Экспозиционная доза излучения до 50—80 Р {0,013—0,02 Кл/кг), полученная за первые четверо суток, не вызывает поражения и потери трудоспособности у людей, за исключением некоторых изменений крови. Экспозиционная доза Р 200—300 Р, полученная за короткий промежуток времени (до четырех суток), может вызвать у людей средние радиационные поражения, но такая же доза, полученная в течение нескольких месяцев, не вызывает заболевания. Здоровый организм человека способен за это время частично вырабатывать новые клетки взамен погибших при облучении [31, 32].
При установлении допустимых доз излучения учитывают, что облучение может быть однократным или многократным. Однократным считается облучение, полученное за первые четверо суток, Облучение, полученное за время, превышающее четверо суток, является многократным. При однократном облучении организма человека в зависимости от полученной экспозиционной дозы различают четыре степени лучевой болезни.
Лучевая, болезнь первой (легкой) степени возникает при общей экспозиционной дозе излучения 100—200 Р (0,026—0,05 Кл/кг). Скрытый период может продолжаться две-три недели, после чего появляются недомогание, общая слабость, чувство тяжести в голове, стеснение в груди, повышение потливости, может наблюдаться периодическое повышение температуры. В крови уменьшается содержание лейкоцитов. Лучевая болезнь первой степени излечима [31].
Лучевая болезнь второй (средней) степени, возникает при общей экспозиционной дозе излучения 200—400 Р (0,05—0,1 Кл/кг). Скрытый период длится около недели. Лучевая болезнь проявляется в более тяжелом недомогании, расстройстве функций нервной системы, головных болях, головокружениях, вначале часто бывает рвота, понос, возможно повышение температуры тела; количество лейкоцитов в крови, особенно лимфоцитов, уменьшается более чем наполовину. При активном лечении выздоровление наступает через 1,5—2 мес. Возможны смертельные исходы — до 20 % [32].
Лучевая болезнь третьей (тяжелой) степени возникает при общей экспозиционной дозе 400—600 Р (0,1—0,15 Кл/кг). Скрытый период — до нескольких часов. Отмечают тяжелое общее состояние, сильные головные боли, рвоту, понос с кровянистым стулом, иногда потерю сознания или резкое возбуждение, кровоизлияния в слизистые оболочки и кожу, некроз слизистых оболочек в области десен. Количество лейкоцитов, а затем эритроцитов и тромбоцитов резко уменьшается. Ввиду ослабления защитных сил организма появляются различные инфекционные осложнения, Без лечения болезнь в 20—70 % случаев заканчивается смертью, чаще от инфекционных осложнений или от кровотечений [31, 32].
При облучении экспозиционной дозой более 600 Р (0,15 Кл/кг) развивается крайне тяжелая четвертая степень лучевой болезни, которая без лечения обычно заканчивается смертью в течение двух недель.
Лучевые болезни у животных развиваются при экспозиционных дозах: 150—250 Р — легкой степени, 250—400 Р — средней степени, 400—600 Р — тяжелой степени [31].
При взрывах ядерных боеприпасов средней и большой мощности зоны поражения проникающей радиации несколько меньше зон поражения ударной волной и световым излучением. Для боеприпасов малой мощности, наоборот, зоны поражения проникающей радиации превосходят зоны поражения ударной волной и световым излучением. Ориентировочные радиусы зон поражения для различных экспозиционных доз гамма-излучений и мощностей взрывов ядерных боеприпасов в приземном слое приведены в табл. 7.1 [32].
Таблица 7.1
|
Экспозиционная доза |
Расстояние от центра взрыва, км. |
|||||
|
Тротиловый эквивалент |
||||||
|
Р |
Кл/кг |
20 кт |
100 кт |
1 Мт |
5 Мт |
10 Мт |
|
500 |
0,13 |
1,2 |
1,65 |
2,4 |
3,0 |
3,4 |
|
300 |
0,678 |
1,4 |
1,8 |
2,6 |
3,2 |
3,6 |
|
200 |
0,052 |
1,5 |
1,9 |
2,8 |
3,4 |
3,9 |
|
100 |
0,026 |
1,6 |
2,1 |
3,0 |
3,6 |
4,2 |
|
50 |
0,013 |
1,8 |
2,25 |
3,2 |
3,8 |
4,5 |
Радиационные повреждения. При воздушных (приземных) и наземных ядерных взрывах плотности потоков (дозы) проникающей радиации на тех расстояниях, где ударная волна выводит из строя здания, сооружения, оборудование и другие элементы производства, в большинстве случаев для объектов являются безопасными. Но с увеличением высоты взрыва все большее значение в поражении объектов приобретает проникающая радиация. При взрывах на больших высотах и в космосе основным поражающим фактором становится импульс проникающей радиации. Проникающая радиация может вызывать обратимые и необратимые изменения в материалах, элементах радиотехнической, электротехнической, оптической и другой аппаратуры. В космическом пространстве эти повреждения могут наблюдаться на расстояниях десятков и сотен километров от центра взрывов мегатонных боеприпасов [31].
Необратимые изменения в материалах вызываются нарушениями структуры кристаллической решетки вещества вследствие возникновении дефектов (в неорганических и полупроводниковых материалах), а также в результате прохождения различных физико-химических процессов. Такими процессами являются: радиационный нагрев, происходящий вследствие преобразования поглощенной энергии проникающей радиации в тепловую; окислительные химические реакции, приводящие к окислению контактов и поверхностей электродов; деструкция и «сшивание» молекул в полимерных материалах, приводящие к изменению физико-механических и электрических параметров; газовыделения и образование пылеобразных продуктов, которые могут вызвать вторичные факторы воздействия (взрывы в замкнутых объемах, запыление отдельных деталей приборов и т. д.). В результате радиационного захвата нейтронов возможно образование примесей радиоактивных веществ. В процессе распада образовавшихся радиоактивных ядер происходит радиационное излучение, которое может оказывать воздействие на электрические параметры элементов и схем, а также затруднять ремонт и эксплуатацию аппаратуры. Наиболее опасны по вторичному излучению изделия, изготовленные из материалов, содержащих бор, марганец, кадмий, индий, серебро и др [31, 32].
Обратимые изменения, как правило, являются следствием ионизации материалов и окружающей среды. Они проявляются в увеличении концентрации носителей тока, что приводит к возрастанию утечки тока, снижению сопротивления в изоляционных, полупроводниковых, проводящих материалах и газовых промежутках. Обратимые изменения в материалах, элементах и аппаратуре в целом могут возникать при мощностях экспозиционных доз 1000 Р/с, Проводимость воздушных промежутков и диэлектрических материалов начинает существенно увеличиваться при мощностях доз 10000 Р/с и более [31].
Проникающая радиация, проходя через различные среды (материалы), ослабляется. Степень ослабления зависит от свойств материалов и толщины защитного слоя. Нейтроны ослабляются в основном за счет столкновения с ядрами атомов. Вероятность процессов взаимодействия нейтронов с ядрами количественно характеризуется эффективным сечением взаимодействия и зависит главным образом от энергии нейтронов и природы ядер мишени.
Энергия гамма-квантов при прохождении их через вещества расходуется в основном на взаимодействие с электронами атомов. Поэтому степень их ослабления практически обратно пропорциональна плотности материала.
Защитные свойства материала характеризуются слоем половинного ослабления, при прохождении которою интенсивность гамма-лучей или нейтронов уменьшается в два раза [32].
Если защитная преграда состоит из нескольких слоев различных материалов, например грунта, бетона и дерева, то подсчитывают степень ослабления для каждого слоя в отдельности и результаты перемножают:

где К — коэффициент ослабления одного защитного слоя преграды (материала); К>осл> — общий коэффициент защиты преграды, состоящей из n-го количества слоев различных материалов; h — толщина (высота) слоя материала, см; d>пол> — толщина слоя материала, ослабляющего излучение в два раза.
Толщина слоя половинного ослабления для нейтронного излучения определяется по справочным данным, для гамма-излучения может быть вычислена по плотности материала: d>пол> — 23/р, где р – плотность материала, г/см3; 23 см. — слой воды (плотность 1 г/см3), ослабляющей гамма-излучение ядерного взрыва в два раза [31].
Защитные сооружения гражданской обороны надежно обеспечивают защиту людей от проникающей радиации. Расчет защитных свойств этих сооружений производится по гамма-излучению, так как доза гамма-излучения значительно выше дозы нейтронного излучения, а слои половинного ослабления для строительных материалов приблизительно одинаковы.
На объектах, оснащенных электронной, электротехнической и оптической аппаратурой, следует предусматривать меры по защите этой аппаратуры от воздействия проникающей радиации. Повышение радиационной стойкости аппаратуры может быть достигнуто путем [32]:
- применения радиационностойких материалов и элементов;
- создания схем малокритичных к изменениям электрических параметров элементов, компенсирующих .и отводящих дополнительные токи, выключающих отдельные блоки и элементы на период воздействия ионизирующих излучений;
- увеличения расстояний между элементами, находящимися под электрической нагрузкой, снижения рабочих напряжений на них;
- регулирования тепловых, электрических и других нагрузок;
- применения различного рода заливок, не проводящих ток при облучении;
- размещения на объектах специальных защитных экранов или использования элементов конструкций объекта для ослабления действий ионизирующих излучений на менее радиационностойкие детали.
Заключение. Гражданская оборона несет непосредственную ответственность за защиту населения и экономики страны от оружия массового поражения и других средств нападения противника, а также за проведение спасательных и неотложных аварийно-восстановительных работ при ликвидации последствий нападения противника [32].
В организационном отношении гражданская оборона построена так, чтобы при необходимости она обеспечивала использование в своих интересах людских и материальных ресурсов, предусматривала успешное решение задач с наименьшим отрывом людей от их производственной деятельности.
Гражданская оборона, является одним из важнейших и основных средств защиты населения при военных действиях и стихийных бедствиях. Необходимость развития и усовершенствования гражданской обороны - повышается с каждым днем, в связи с ухудшением экологического состояния Украины, и Земли в целом. Интенсивное развитие ядерного и химического оружия, обуславливает разработку новых средств защиты для населения и государственных объектов стратегического значения [31, 32].
8 ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ
8.1 Общие вопросы охраны труда
Охрана труда представляет собой систему законодательных актов, социально-экономических, организационных, технических, санитарно-гигиенических и лечебно-профилактических мероприятий и средств, обеспечивающих безопасность, сохранение здоровья и работоспособности человека в процессе труда. Этот закон определяет основные положения по реализации конституционного права граждан на труд, охрану труда, охрану их жизни и здоровья, регулирует взаимоотношения между работниками и администрацией по вопросам охраны труда и распространяется на все виды деятельности. В Украине законодательство по охране труда состоит из Закона “Об охране труда”, Кодекса законов о труде и других нормативных актов. В таблице 8.1 приведены законы и нормативные документы, которые использованы в разделе.
Таблица 8.1 – Законы и нормативные документы, которые использованы в разделе
|
№ п/п |
Обозначение закона или нормативного документа |
Название закона или нормативного документа |
Дата утверж-дения и введения в действие |
Орган власти утвердивший документ |
|
1 |
2 |
3 |
4 |
5 |
|
1 2 3 4 5 6 7 8 9 10 11 12 - 13 14 |
Закон Украины Закон Украины
ГОСТ 12.0.003 – 74* ССБТ ГОСТ 12.1.005 – 88* ССБТ.
ГОСТ 12.1.003 – 89. ССБТ ДНАОП 0.03-3.14-85 ГОСТ 12.1.012-90 ССБТ ДНАОП 0.00-1.31-99. ГОСТ 12.1.045 – 84 ССБТ ГОСТ 12.2.007.0-75 ССБТ. ГОСТ 14255-69 ДБН В.1.1 ГОСТ 12.1.004-91 ССБТ. ISO 14001-97 |
Об охране труда Об охране окружающей природной среды Опасные и вредные производственные факторы. Классификация. Общие санитарно-гигиенические требования к воздуху рабочей зоны. Шум. Общие требования безопасности. Санітарні норми допустимих рівнів шуму на робочих місцях №3223-85 Вибрационная безопас-ность. Общие требования. Правила охр. труда при эксплуатации ЭВМ. Электростатические по-ля. Допустимые уровни на рабочих местах и тре-бования к проведению контроля. Изделия электрические. Общие требования безопасности Аппараты электричес-кие напряжением до 1000В. Оболочки. Степени защиты. Захист від пожежі. Пожежна безпека об’єктів будівництва. Пожарная безопасность. Общие требования. Система управления ок-ружающей средой. |
25.11.2002 г. 25.06.1991 г. Введен 01.01.1976. Введен 01.01.89. Введен 01.07.89 1985 Введ. 01.07.91. 10.02.1999 Введ. 01.07.85. Введ. 01.01.76. 1970 2002 Введ. 01.07.91. 1998 |
Верховный Совет Украины Верховный Совет Украины Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабинет Министров Кабінет Міністров Кабинет Министров Кабинет Министров |
Улучшение условий труда, повышение его безопасности влияет на производительность труда, качество и себестоимость выпускаемой продукции, а также приводит к снижению производственного травматизма, профессиональных заболеваний, что сохраняет здоровье трудящихся и одновременно приводит к уменьшению затрат на оплату льгот и компенсаций за работу в неблагоприятных условиях, на лечение. Труд человека в современном производстве представляет собой процесс взаимодействия человека и машины, сопровождающийся исключительной, в большинстве случаев непроизвольной мобилизацией психологических и физических функций человека, приводящей в последствии к снижению работоспособности. Поэтому важным является соблюдение оператором режима труда и отдыха. Одним из важных средств охраны труда, обеспечивающим необходимые санитарно-гигиенические условия, сохраняющим здоровье трудящихся на производстве, способствующим высокой производительности труда является производственная санитария. К числу решаемых ею задач относят обеспечение в рабочей зоне микроклимата, требуемого для нормального самочувствия работающего, допустимых уровней шума и доз электромагнитного излучения.
Разработка программных продуктов (прикладных программ, алгоритмов) предполагает использование в качестве аппаратного обеспечения ПЭВМ, дополнительные средства графического вывода (принтер, сканер), а также бытовую технику в виде кондиционера для облегчения работы и поддержания необходимой температуры в помещении.
В таблице 8.2 приведен перечень опасных и вредных производственных факторов, а также источники их возникновения, имеющихся в условиях эксплуатации вышеперечисленного аппаратного обеспечения в соответствии с ГОСТ 12.0.003-74*.
Таблица 8.2 – Перечень вредных и опасных производственных факторов
|
Наименование фактора |
Источники возникновения |
Высокое электрическое напряжение |
Сеть питания ПЭВМ и других периферийных устройств |
|
Повышенный уровень статического электричества |
Высокое напряжение электронной лучевой трубки (ЭЛТ), диэлектрические поверхности |
|
Электромагнитные излучения |
ЭЛТ монитора |
|
Повышенный уровень ионизации воздуха |
Рентгеновское излучение монитора и статическое электричество |
|
Рентгеновское излучение |
ЭЛТ монитора |
Повышенный уровень шума ивибрации |
Устройства охлаждения ЭВМ, печатающие устройства |
|
Повышенная пульсация светового излучения |
Лампы дневного света, экран монитора |
|
Неблагоприятные метеоусловия |
Состояние систем отопления, вентиляции |
|
Прямая и отраженная блескость |
Внешние источники света, воздействующие на экран |
|
Пожароопасность помещения |
Наличие сгораемых материалов и источников зажигания |
|
Психофизиологические факторы |
Перенапряжение зрения, монотонность труда, умственные и эмоциональные перегрузки |
8.2 Производственная санитария
Разработанное программное обеспечение будет эксплуатироваться пользователем с использованием необходимых аппаратных средств, которые в свою очередь могут являться источниками каких-либо вредных факторов, то произведем анализ возникновения вредных факторов для пользователя и окружающей среды, используя для этого перечень вредных и опасных производственных факторов приведенных в таблице 8.2.
Научно – исследовательская работа относится к легким физическим работам, но характеризуется напряженным умственным трудом, то руководствуясь ГОСТ 12.1.005-88, относят к категории Ia (легкой), так как работа исследователя производится сидя, не требует систематического физического напряжения или поднятия и переноса тяжестей (расход энергии при выполнении работы до 139 Вт).
Допустимые и оптимальные значения параметров метеорологических условий в соответствии с категорией работ и в зависимости от периода года приведены в таблице 8.3.
Таблица 8.3 – Допустимые и оптимальные значения параметров микроклимата
|
Катего-рия работ по тяжести |
Период года |
Температура, 0С |
Относи-тельная влаж-ность, % |
Скорость движения воздуха в помещении, м\с |
|
|
Постоянные рабочие места |
Непостоянные рабочие места |
||||
|
Допустимые значения параметров |
|||||
|
1а |
Холод-ный |
19 – 25 |
17 – 23 |
75 |
не более 0.1 |
|
1а |
Теплый |
21 – 27 |
19 – 29 |
55 |
0.1 – 0.2 |
|
Оптимальные значения параметров |
|||||
|
1а |
Холод-ный |
22 – 24 |
20 – 22 |
40 – 60 |
0.1 |
|
1а |
Теплый |
23 – 25 |
21 – 27 |
40 – 60 |
0.1 |
Обеспечение условий, приведенных в таблице 8.3, в теплый период года должно выполняться при помощи кондиционера. В холодный период года обмен воздуха осуществляется с помощью кондиционера и централизованного водяного отопления согласно СНиП 2.04.05.-93 [33].
Задачей вентиляции и проветривания помещения является обеспечение чистоты воздуха и заданных метеорологических условий в производственных помещениях.
Состояние освещения производственных, служебных и вспомогательных помещений регламентируется СНиП ІІ–4–79 [34]. В светлое время используется боковое одностороннее естественное освещение, а в темное время суток – искусственное. Искусственное освещение по функциональному значению – рабочее, по способу расположения источников света – общее равномерное, так как светильники расположены в верхней зоне помещения равномерно.
Для создания комфортных условий зрительной работы средней точности необходимы следующие данные по нормам освещения, приведеные в таблице 8.4
Таблица 8.4 - Освещенность в производственном помещении
|
Наименование помещения
|
Площадь пола, кв. м. |
Разряд зрительной работы |
Освещение |
||
|
Естественное |
искусственное |
||||
|
вид освеще-ния |
КЕО, % |
Нормиро-ванная освещенность Е, лк |
|||
|
Вычислитель-ный центр |
40 |
IIIв |
боковое |
1,53 |
300-500 |
Согласно СНиП II-4-79 [34] для выбранного объекта различения, фона и контраста объекта различения с фоном минимальное значение освещенности будет равно 300 лк.
Естественное освещение рабочих мест –
боковое, значение коэффициента
естественной освещенности (КЕО):  .
.
При пересчете КЕО для условий города Харькова (IV пояс светового климата) воспользуемся формулой:
где m — коэффициент светового климата;
c — коэффициент солнечного климата.
Для IV светового пояса
выбираем m = 0.9. Исходя из
ориентации окон по сторонам света c
= 0.85. Тогда
 .
.
В соответствие с ДНАОП 0.00-1.31-99 нормативный показатель КЕО должен быть не менее 1,5%.
В качестве источников света используются люминесцентные лампы мощностью 40 Вт или энергоэкономные мощностью 36 Вт типа ЛБ, ЛХБ, ЛЕЦ как наиболее эффективные и приемлемые с точки зрения спектрального состава, цветовая температура излучения которых находится в диапазоне 3500-4200 К.
Для освещения помещения применяются светильники серии ЛС004 с металлической экранирующей решеткой и непрозрачными боковинами.
Шум является одним из наиболее распространенных в производстве вредных факторов. При длительном воздействии шума человек быстро устает, раздражается, происходит перенапряжение слуховых анализаторов. В соответствии с ГОСТ 12.1.003-89 и ДНАОП 0.03-3.14-85 в вычислительных центрах эквивалентные уровни звука не должны превышать 50 дБА. Согласно ГОСТ 12.1.012-90 уровень вибрации для категории II, тип в, в условиях «комфорта» не должна превышать 75 дБ. Для уменьшения уровня звука и вибрации применяются демпфирующие материалы (отсек принтера с печатающей головкой закрывается крышкой, используется резиновая прокладка между принтером и столом).
Основным источником электромагнитного излучения, в том числе рентгеновского, в помещении являются электронно-лучевые трубки (ЭЛТ) мониторов. Согласно ДНАОП 0.00-0.31-99 мощность экспозиционной дозы рентгеновского излучения трубки в любой точке перед экраном на расстоянии 5 см от его поверхности не должна превышать 100 мкР/ч. Защита пользователей ЭВМ от ЭМИ и рентгеновского излучения обеспечивается с помощью экранов из специального затемненного стекла. Нормы ЭМИ для диапазона частот 15-25 кГц по электрической составляющей Е не должны превышать 50В/м, по магнитной составляющей Н – 5А/м.
Однако требования ТСО’95 более жесткие. Например, нормы Е и Н в том же диапазоне частот равны значениям 1 В/м и 20 мА/м.
Допустимые уровни напряженности электростатического поля на рабочем месте оператора, согласно ГОСТ 12.1.045-84, не должны превышать 20 кВ на метр. В помещениях для предотвращения образования статического электричества и защиты от него должны иметься нейтрализаторы и увлажнители воздуха, пол должен иметь антистатическое покрытие, а также необходимо делать заземление экрана дисплея.
Рентгеновское излучение и статическое электричество вызывает ионизацию воздуха с образованием положительных ионов, считающихся неблагоприятными для человека. Норма содержания легких аэроионов обоих знаков от 1500 до 5000 в 1 см3 воздуха ДНАОП 0.00-1.31-99. Мероприятиями по снижению количества ионов в воздухе являются увлажнение воздуха и проветривание помещения.
Для уменьшения воздействия рентгеновского излучения и ЭМИ экран снабжен специальным покрытием, снижающим уровень этого излучения. Также снижение интенсивности электромагнитного и рентгеновского излучений достигается сокращением времени облучения: общее время работы не должно превышать 4 часа за смену, длительность перерыва для отдыха должна составлять от 5 до 15 минут. Общий перерыв через 4 часа. Дополнительный перерыв через 3 часа и за 2 часа до окончания работы.
8.3 Техника безопасности
Эксплуатируемый персональный компьютер IBM PC не является источником механических и тепловых опасностей, но является потребителем электроэнергии. Поэтому, при рассмотрении вопросов техники безопасности ограничиваемся электробезопасностью.
Согласно ДНАОП 0.00 – 1.31 –99 при проектировании систем электроснабжения, при монтаже силового электрооборудования и электрического освещения и в зданиях и помещениях для ЭВМ необходимо придерживаться требований нормативно-технической документации.
ПЭВМ является однофазным потребителем электроэнергии, питающейся переменным током напряжением 220В и частотой 50Гц, от сети с заземленной нейтралью. По способу защиты человека от поражения электрическим током ЭВМ должно соответствовать первому классу защиты согласно ГОСТ 12.2.007.0-75. Защиту от случайного прикосновения к токоведущим частям обеспечивают конструктивные, схемно-конструктивные и эксплуатационные меры защиты. Комплекс необходимых мер по электробезопасности определяется, исходя из видов электроустановки, ее номинального напряжения, условий среды, типа помещения и доступности электрооборудования.
По степени опасности поражения электрическим током помещение относится к помещениям без повышенной опасности, в соответствии с ПУЭ-87 [12]. В ПУЭ-87 [33] предусмотрены следующие меры электробезопасности:
1) Конструктивные меры
IBM PC относится к электроустановкам до 1000В закрытого исполнения, все токоведущие части находятся в кожухах. В соответствии с ГОСТ 14255-69 и ПУЭ-87 [34] выбираем степень защиты персонала от соприкосновения с токоведущими частями внутри защитного корпуса и от попадания воды внутрь корпуса – IP-44.
2) Схемно-конструктивные меры
В качестве схемно-конструктивной меры безопасности предусматривается зануление в соответствии с ГОСТ 14255-69.Кроме того, используется двойная изоляция монитора и малые напряжения (менее 42 В).
В помещении размещено 5 компьютеров, поэтому кабель прокладывают в металлических трубах и гибких металлических рукавах с отводами. Если ЭВМ размещены в центре помещения электросеть прокладывается в каналах или под съемным полом в металлических трубах и гибких металлических рукавах.
Произведем расчет зануления в соответствии с требованиями [33].
Схема электроснабжения зануляемой электроустановки представлена на рисунке 8.1:

Рисунок 8.1 – Схема электроснабжения зануляемой электроустановки
где
ТрU>1>/U>2> – трансформатор масляный понижающий , схема соединения обмоток – звезда-звезда;
СШ – сборная шина;
РЩ – распределительный щит;
А.З. – аппарат защиты;
L>1> – длина участка сети от распределительного щита до электроустановки;
L>2> – длина участка сети от понижающего трансформатора до распределительного щита
R>0> – сопротивление заземлителя нейтральной точки;
Р>1> – мощность потребителя (компьютеры, принтер, ксерокс, электроосвещение);
Электросеть выполнена как двухпроводная сеть, состоящая из фазного провода и нулевого защитного проводников.
L>1>=45 м; L>2>=450 м; P>1>=2550 Вт.
Материал жилы – медь, способ прокладывания:
1-й участок – в металлической трубе; 2-й участок – в земле.
Произведем расчет автомата отключения.
Постановка задачи зануления электроустановки: определение такого сечения нулевого защитного проводника при котором ток короткого замыкания I>кз> в заданное число раз К превысит номинальный ток срабатывания аппарата защиты I>ном>, что обеспечит отключение поврежденного потребителя.
Выбор типа автоматического выключателя.
1а) Определение тока, питающего электроустановки мощностью Р>1 >= 2550 Вт:
I>1н >= Р>1>/U>Ф >= 2550/220 = 11,59 А,
где U>ф> – фазное напряжение (220 В);
1б) Определение расчетной величины тока срабатывания защитного аппарата:
I>расч >= (К>п>/К>т>)*I>1н >= (3/2.5)*11,59 = 13,909 А.
где К>п >= 3 – коэффициент кратности пускового тока;
К>т >= 2.5 – коэффициент тяжести пуска электроустановки (зависит от времени пуска: t = 5 с, пуск легкий).
1в) Выбор типа автоматического выключателя и определение величины тока срабатывания аппарата защиты:
I>ном >= 16 А; тип автоматического выключателя АЕ2026.
2) Определение тока короткого замыкания фазы на корпус электроустановки:
I>кз>=U>ф>/Z>пфн>.
Z>пфн> – сопротивление петли фаза-ноль.
2а) Сечение фазного провода определяется в зависимости от допустимого длительного тока, способа прокладки проводов и материала проводов:
Для нахождения сечения провода, определим диаметр провода d. Где d определяют по значению тока I [A], и допустимой плотности тока J [A/мм2]. Табличное значение: J = 5 [A/мм2].
 ;
;
I =I>1н >,тогда:
d = 1.78 мм;
S>ф1
>=
 =
2,5мм2;
=
2,5мм2;
0,5* S>ф1> S>н1>
S>ф1>
S>н1>
S>ф1>
S>н1 >>=> S>ф1> = 2,5 мм2
Согласно требованиям ДНАОП 0.00 – 1.31 – 99, площадь сечения нулево-го рабочего и нулевого защитного проводников в однофазной 3-х проводной сети должны быть равны: где R>нз> – нулевое защитное сопротивление.
2б) Определение сопротивления фазного проводника
R>ф1> =
 *L1/S>ф1>
= 0,018*45/2.5 = 0,3226 Ом
*L1/S>ф1>
= 0,018*45/2.5 = 0,3226 Ом
R>н1> = R>ф1>* L>1> = 0, 3226 Ом
2в) Потери напряжений U>п1> на 1-м и U>п2> на 2-м участках не должны превышать 22 В.
U>п1>+U>п2
>>
 >>
>22 В;
>>
>22 В;
U>п1 >= I>1н>*R>ф1 >= 11,59*0, 3226 = 3,738 В;
U>п1>>>U>1д
>>
>>
>9 В;
U>1д> – допустимое потеря напряжения;
2г) Определяем мощность P>2> и проделываем аналогичные вычисления, как и для P>1>
P>1>=2,55 кВт, тогда P>2>=100* P>1>=255 кВт,
I>2н >= Р>2>/U>Ф >= 255000/220 = 1159,09,
;
I =I>2н >,тогда:
d = 17,204 мм;
S>ф2
>=
= 232.342 мм2;
0,5* S>ф2>S>н2>
S>ф2>
S>н2 >>=> S>ф2> = 232.342 мм2
R>ф2 >=
*L>2>/S>ф2>,
где
= 0.018 Ом*мм2/м.
R>ф2 >= 0.018*450/232.342 = 0,01296 Ом
R>ф2> = R>н2>= 0,01296 Ом
2д)Потери напряжений U>п2> на 2-м участках :
U>п2 >= I>2н>*R>ф2 >= 1159,09*0,01296 = 15,02 В;
U>п2>>>22-U>1д
>
Проверяем необходимое выполнение условия U>п1>+U>п2 >=3,738+15,02; тогда 18,758 < 22В – условие выполняется
2е) Определение полного сопротивления трансформатора.
Выбираем мощность силового трансформатора N>тр>. Для масляного транс-форматора при схеме соединения обмоток звезда-звезда и напряжении на первичной обмотке до U=20-35 кВ:
N>тр> = f(Р>2>) = 4*Р>2>.
N>тр >= 4*Р>2 >= 4*255 = 1020 кВт.
Выбираем сопротивление обмотки трансформатора по таблице
Z>тр >= f (N>тр>) = 0,121 Ом.
2ж) Определяем полное сопротивление петли фаза-нуль Z>пфн> и ток короткого замыкания на замкнутый корпус I>кз>:
 ,
,
где x – сопротивление взаимоиндукции и индуктивного сопротивления.
Для медных проводников и в случае
совместного проложения фазного, нулевого
рабочего и нулевого защитного
 .Сделав
необходимые вычисления получим:
.Сделав
необходимые вычисления получим:
Z>пфн >= 0,64 Ом;
I>кз >= U>ф>/Z>пфн> = 220/0,64 = 343,75 A.
3) Проверка выполнения условий надежности работы зануления.
Должно выполняться условие I>кз>
 к*I>ном>, где к=3 –
коэффициент запаса защиты при защите
автоматическими выключателями.
к*I>ном>, где к=3 –
коэффициент запаса защиты при защите
автоматическими выключателями.
343,75
41,727 –
условие выполняется.
Вывод: Для обеспечения отключения электроустановки в короткое время необходимо использовать автоматический выключатель АЕ2026 с током сра-батывания I>ном >= 16 А; на первом участке сети (от распределительного щита до электроустановки) – нулевой защитный провод сечением S>н1 >= 2,5 мм2.
3) Эксплутационные меры
Необходимо соблюдать правила техники безопасности при работе с высоким напряжением и следующие меры предосторожности:
– монтаж, обслуживание, ремонт и наладка ЭВМ, замена деталей, приспособлений и блоков должна осуществляться только при полном выключении питания;
– в помещениях, где эксплуатируется больше 5 компьютеров на видном и доступном месте устанавливается аварийный и резервный выключатель для полного отключения электропитания;
– заземленные конструкции помещения должны быть надежно защищены диэлектрическими щитками или сетками от случайного проникновения.
Работник, поступающий на работу, обязательно проходит вводный и первичный инструктаж по технике безопасности в целях профилактики несчастных случаев, а также знакомится с инструктажем по соблюдению мер техники безопасности при работе с ПЭВМ.
8.4 Пожарная безопасность
Согласно с требованием ГОСТ 12.1.004-91 пожарная безопасность обеспечивается следующими нормами:
– системой предотвращения пожаров;
– системой пожарной защиты;
– организационными мероприятиями по пожарной безопасности.
Предотвращение пожара достигается следующими мерами: предотвращение образования горючей среды, предотвращение образования в горючей среде источников зажигания.
Для уменьшения опасности образования в горючей среде источников зажигания предусмотрено:
а) использование электрооборудования, соответствующего классу пожароопасной зоны П-IIa, для которой степень защиты оболочки электрооборудования должна быть не менее IP-44, степень защиты светильников IP-23;
б) молниезащита зданий, сооружений и оборудования (для условий города Харькова со средней грозовой деятельностью 20 часов в год и более установлена III категория молниезащиты). Молниеотвод выполнен в соответствии с требованием [34];
в) обеспечение защиты от короткого замыкания;
г) применение заземления экрана для стока статического электричества и др.
Помещение, в котором выполнялась дипломная работа, расположено на четвертом этаже шестиэтажного здания. В ней находится 6 компьютера. Размеры комнаты: длина-8м, ширина-5м, высота-4,2м. Общая площадь состав-ляет 40 м2, что соответствует требуемым нормам ДНАОП 0.00-1.31-99, согласно которым на одно рабочее место должно приходится не менее 6,0 м2.
По категории взрыво- и пожароопасности согласно ОНТП-86 [35] данное помещение относится к категории В – пожароопасное из-за твердых сгораемых материалов (рабочие столы, бумага, изоляция и др.). Исходя из категории пожароопасности и этажности здания, степень огнестойкости здания II согласно ДБН В 1.1-2002 и СНиП 2.09.02-85 [36].
При выборе средств тушения пожара для обеспечения безопасности человека от возможного поражения электрическим током в помещении предус-мотрено использовать углекислотные огнетушители ВВК-7 емкостью 7 литра. Огнетушители находятся на видном и легко доступном месте (см. таблицу 5.5). При возникновении пожара предусмотрена возможность сообщения в пожарную охрану по телефону [37].
В системе пожарной защиты предусмотрены следующие меры:
1. Система автоматической пожарной сигнализации оснащена дымовыми сигнализаторами.
2. Помещение оснащено углекислотными огнетушителями – ВВК-7.
3.Для успешной эвакуации персонала двери помещения имеют следующие размеры:
– ширина не менее 1.5 м;
– высота не менее 2.0 м.
Ширина коридора 1.8 м. Рабочее помещение должно иметь два выхода. Расстояние от наиболее удаленного рабочего места не должно превышать 100 м.
Организационными мероприятиями пожарной профилактики является обучение производственного персонала противопожарным правилам, издание необходимых инструкций и плакатов, средств наглядной агитации. Обязательным является наличие плана эвакуации.
Таблица 8.5 – Перечень первичных средств пожаротушения, обязательных в вычислительном центре
|
Пло-щадь, кв.м. |
Первичные Средства пожаротушения (тип, наименование) |
Кол-во, шшт. |
Огнегасящий эффект |
|
40 |
углекислотные огнетушители ВВК-7, войлок, кошма, песок |
2 |
Разбавление воздуха углекислым газом и снижение в нем содержания кислорода до концентрации, при которой прекращается горение. Огнетушащий эффект указанным газом обуславливается потерями теплоты и снижением теплового эффекта реакции прекращение доступа кислорода к горящим элементам. |
8.5 Охрана окружающей среды
25 июня 1991 года принят Закон Украины «Об охране окружающей природной среды» (редакции Закона 1993, 1996 г.). Закон определяет правовые, экономические, социальные основы охраны окружающей среды.
Задачей законодательства об охране окружающей среды является регулирование отношений в области охраны природы, использовании и воспроизводстве природных ресурсов, обеспечении экологической безопасности, предупреждения и ликвидации отрицательного воздействия хозяйственной и иной деятельности на окружающую среду, сохранение природных ресурсов, генетического фонда нации, ландшафтов и других природных объектов.
При массовом производстве мониторов нельзя не учитывать их влияние на окружающую среду на всех стадиях их «жизни» при изготовлении, эксплуатации, окончания срока службы. Сегодня действуют экологические стандарты, которые определяют требования к производству и материала. Они не должны содержать фреонов, хлоридов и бромидов (BS 7750) ТСО '95.
В стандарте ТСО '99 допускается ограничение использования кадмия в светочувствительном слое экрана дисплея и ртути в батарейках. Аппараты, тара и документация должны допускать нетоксичную переработку после использования. Международные стандарты, начиная с ТСО '92, включают требования пониженного электропотребления и ограничивают допустимые уровни мощности потребляемой энергии в неактивном режиме.
Работа на ПК типа Intel Pentium-Ill не оказывает вредного воздействия на окружающую среду. После истечения срока службы он полностью подлежит вторичной переработке. Необходимо выполнять требования стандарта ISO -14000, который определяет требования к организации производственного процесса с минимальным ущербом, для окружающей природной среды.
Ужесточение требований к производству и материалам, а также разработка новых производственных и утилизационных технологий позволяет уменьшить антропогенную нагрузку на окружающую среду.
Соблюдение приведенных правил и норм безопасности позволяет улучшить условия труда в помещении.
ЗАКЛЮЧЕНИЕ
В данной дипломной работе:
1. Разработаны и изучены математические модели: упругого космического аппарата, командных приборов (ГИВУС), исполнительных органов – двигатели стабилизации большой и малой тяги (ДБТ, ДМТ).
2. Разработан алгоритм функционирования СУО, включающий в себя: алгоритм стабилизации СУ, алгоритм идентификации отказов исполнительных органов СУ на базе субоптимального фильтра Калмана-Бьюси, алгоритм диагностики отказов чувствительных элементов ГИВУС на базе фильтра Льюинбергера, алгоритм остаточной тяги.
3. На базе разработанных алгоритмов было проведено математическое моделирование СУО с учетом моментов внешних сил (аэродинамических и гравитационных). Результаты моделирования показали высокую эффективность разработанных алгоритмов. Так идентификация ДС при остаточной тяге 15% составила - 5.3 сек, а для диагностики чувствительных элементов ГИВУС потребовалось 3 такта БЦВМ.
4. Разработанные алгоритмы имеют практическую ценность и могут в дальнейшем усовершенствоваться. Так для диагностики и контроля отказов чувствительных элементов ГИВУС, можно использовать фильтр Калмана, нейронные сети и элементы искусственного интеллекта.
.
СПИСОК ИСТОЧНИКОВ ИНФОРМАЦИИ
1. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - М.: Наука, 1974. - 600 с.
2. Синяков И. М. Системы управления упругими подвижными объектами. – Л.: ЛГУ, 1981. – 200 с.
3. Разыграев А. П. Основы управления полетом космических аппаратов и кораблей. – М.: Машиностроение, 1977. – 472 с.
4. Алексеев К. Б., Бебенин Г. Г. Управление космическими летательными аппаратами. – М.: Машиностроение, 1974. – 340 с.
5. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - М.: Наука, 1973. - 320 с.
6. Инженерный справочник по космической технике. Изд. 2-е, перераб. и доп. Под ред. А.В.Солодова. - М.: Воениздат, 1977. – 430 с.
7. Кузовков Н.Т. и др. Непрерывные и дискретные системы управления и методы идентификации. - М.: Машиностроение, 1978. – 222 с.
8. Колесников К.С., Сухов В.Н. Упругий летательный аппарат как объект автоматического регулирования. - М.: Машиностроение, 1974 – 266 с.
9. Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. – М.: Наука, 1992. – 280 с.
10. Киреев Н.Г. Условия полета и траектории движения беспилотных летательных аппаратов. – К.: УМК ВО, 1993. – 212 с.
11. Киреев Н.Г. Динамика полета и управление. – К.: УМК ВО, 1990.
12. Анучин О.Н., Емельянцев Г.И. Бесплатформенные инерциальные системы навигации и ориентации (БИНС и БИСО). Учебное пособие. – СПб.: ИТМО, 1995. – 110 с.
13. Киреев Н.Г. Системы управления беспилотных летательных аппаратов. – К.: УМК ВО, 1993. – 160 с.
14. Киреев Н.Г. Элементы систем управления ракет и космических аппаратов. – К.: УМК ВО, 1992.
15. Несенюк Л.П. Бесплатформенные инерциальные системы. Обзор состояния и перспектив развития // Гироскопия и навигация. - № 1 (36). – 2002. – С. 13-23.
16. Кузовков Н. Т. Модальное управление и наблюдающие устройства. – М.: Машиностроение, 1976. – 187 с.
17. Науменко К. И. Наблюдение и управление движением динамических систем. – Киев: Наукова думка, 1984. – 208 с.
18. Панов А.П. Математические основы теории инерциальной ориентации. – Киев: Наукова думка, 1995. – 280 с
19. Плаксий Ю.А., Фролов Ю.А. Алгоритм определения ориентации свободно вращающегося твердого тела с учетом его инерционных характеристик. – Харьков, 1984. – 10 с. Рук. предст. ХПИ. Деп. в УкрНИИТИ, № 1551 Ук-84 Деп.
20. Хемминг Р.В.“Численные методы для научных работников и инженеров ”: Пер с англ.:Под редакцией Р.С.Гутера .- гл. ред. физ. мат. лит. 1968. 203 с.
21. Пельпор Д.С. Гироскопические системы ориентации и стабилизации. Справочное пособие. - М.: Машиностроение, 1982, 165 с.
22. Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. – М.: Машиностроение, 1982. – 216 с.
23. Евланов Л.Г. Контроль динамических систем. Изд. 2-е перераб. и доп. – М.: Наука, 1979, - 432 с.
24. Киреев Н.Г. Аппроксимация и идентификация в задачах динамики полета и управления. – К.: УМК ВО, 1992.
25. Кузнецов Ю.А, Уханов Е.В. Применение фильтра Калмана в задаче идентификации отказов двигателей стабилизации космического аппарата // Вестник НТУ ХПИ. № 19’ 2004, Харьков. – С. 121-126.
26. Техническое задание на разработку гироскопического измерителя вектора угловой скорости системы управления астрофизического модуля автоматических космических аппаратов серии «Спектр» 11014/09-97. НПП ХА, 1997.
27. Острем К.Ю. Введение в стохастическую теорию управления. Пер. с англ. С.А. Анисимова. – М.: Мир, 1973. – 320с.
28. Ширяев А.Н. Вероятность М. «Наука» 1988, 305с.
29. Дж. Ортега , У.Пул Введение в численные методы решения дифференциальных уравнений. Пер.с англ.; под редакцией А.А.Абрамова - М.;Наука.Гл.ред.физ.мат.лит.1986. 288с.
30. Макконел, К.Р. Брю С.Л. Экономикс – принципы, проблемы и политика пер. с англ. 2-ое изд. К.; Хагар-Демос 1993, 785с.
31. АтаманюкВ.Г. и др. Гражданская оборона 2-е изд.– М.: Высш. шк., 1987, - 288с.
32. Демиденко Г.П. и др. Защита объектов народного хазяйства от оружия массового поражения: Справочник –К.:Высш. шк., 1989, - 287с.
33. СНиП 2.04.05-93 Нормы проектирования. Отопление, вентиляция и кондиционирование. - М.: Стройиздат, 1994, 64 с.
34. СНиП П-4-79.
Строительные нормы и правила. Естественное
и
искусственное освещение. Нормы
проектирования. - М.: Стройиздат, 1980,
ПО
74 с.
35. ПУЭ 87.
Правила устройства электроустановок.
М.:
Энерогоатомиздат,
1987, 648 с.
36. ОНТП
24-86. Общесоюзные нормы
технологического
проектирования.
Определение категорий зданий и сооружений
по взрыво - и
пожароопасности, -М.:
Стройиздат., 1987, 128 с.
37. СНиП 2.09.02-85. Строительные нормы и правила. Производственные здания промышленных предприятий. Нормы проектирования.- М.:Стройиздат., 1986, 208 с.
ПРИЛОЖЕНИЕ А
КОЭФФИЦИЕНТЫ ОСЦИЛЛЯТОРОВ
Epsilon
|
0.06 |
0.09 |
0.16 |
0.28 |
WQi^2
|
4,80 |
7,50 |
23,70 |
80,50 |
Коэффициенты AX
|
0.00000000209 |
-0.000000173 |
0.00000000157 |
0.00000000142 |
|
-0.00000000209 |
-0.000000173 |
0.00000000157 |
0.00000000142 |
|
-0.00000000209 |
0.0000000297 |
-0.00000000157 |
-0.00000000142 |
|
0.00000000209 |
0.0000000297 |
-0.00000000157 |
-0.00000000142 |
|
0.00000000209 |
-0.000000212 |
0.00000000157 |
0.00000000142 |
|
-0.00000000209 |
-0.000000212 |
0.00000000157 |
0.00000000142 |
|
-0.00000000209 |
0.0000000688 |
-0.00000000157 |
-0.00000000142 |
|
0.00000000209 |
0.0000000688 |
-0.00000000157 |
-0.00000000142 |
Коэффициенты AY
|
0.000000421, |
0.0 |
0.0000000562 |
0.000000164 |
|
0.000000421, |
0.0 |
0.0000000562 |
0.000000164 |
|
-0.000000148, |
0.0 |
0.0000000562 |
0.0000000146 |
|
-0.000000148, |
0.0 |
0.0000000562 |
0.0000000146 |
|
0.000000422, |
0.0 |
-0.0000000256 |
0.000000123 |
|
0.000000422, |
0.0 |
-0.0000000256 |
0.000000123 |
|
-0.000000367, |
0.0 |
-0.0000000256 |
0.0000000862 |
|
-0.000000367, |
0.0 |
-0.0000000256 |
0.0000000862 |
Продолжение ПРИЛОЖЕНИЯ А
Коэффициенты AZ
|
0.0000000344 |
0.000000439, |
0.0 |
0.00000000906 |
|
-0.0000000344 |
0.000000439, |
0.0 |
0.00000000906 |
|
-0.0000000344 |
0.000000439, |
0.0 |
0.00000000906 |
|
0.0000000344 |
0.000000439, |
0.0 |
0.00000000906 |
|
0.0000000344 |
-0.000000202, |
0.0 |
0.00000000906 |
|
-0.0000000344 |
-0.000000202, |
0.0 |
0.00000000906 |
|
-0.0000000344 |
-0.000000202, |
0.0 |
0.00000000906 |
|
0.0000000344 |
-0.000000202, |
0.0 |
0.00000000906 |
ПРИЛОЖЕНИЕ Б
Результаты моделирования СУО

Рисунок Б.1 – Фазовый портрет, соответствующий процессу стабилизации с НУ 1-ого варианта табл. 5.1 в канале X.

Рисунок Б.2 – Фазовый портрет, соответствующий процессу стабилизации с НУ 1-ого варианта табл. 5.1 в канале Y.
Продолжение ПРИЛОЖЕНИЯ Б

Рисунок Б.3 – Фазовый портрет, соответствующий процессу стабилизации с НУ 1-ого варианта табл. 5.1 в канале Z.

Рисунок Б.4 – Фазовый портрет, соответствующий процессу стабилизации с НУ 2-ого варианта табл. 5.1 в канале X
Продолжение ПРИЛОЖЕНИЯ Б

Рисунок Б.5 – Фазовый портрет, соответствующий процессу стабилизации с НУ 2-ого варианта табл. 5.1 в канале Y
 .
.
Рисунок Б.6 – Фазовый портрет, соответствующий процессу стабилизации с НУ 2-ого варианта табл. 5.1 в канале Z
Продолжение ПРИЛОЖЕНИЯ Б

Рисунок Б.7 – Фазовый портрет, соответствующий процессу стабилизации с НУ 3-ого варианта табл. 5.1 в канале X

Рисунок Б.8 – Фазовый портрет, соответствующий процессу стабилизации с НУ 3-ого варианта табл. 5.1 в канале Y
Продолжение ПРИЛОЖЕНИЯ Б

Рисунок Б.9 – Фазовый портрет, соответствующий процессу стабилизации с НУ 3-ого варианта табл. 5.1 в канале Z

Рисунок Б.10 – Фазовый портрет, соответствующий процессу стабилизации с НУ 4-ого варианта табл. 5.1 в канале X
Продолжение ПРИЛОЖЕНИЯ Б

Рисунок Б.11 – Фазовый портрет, соответствующий процессу стабилизации с НУ 4-ого варианта табл. 5.1 в канале Y.

Рисунок Б.12 – Фазовый портрет, соответствующий процессу стабилизации с НУ 4-ого варианта табл. 5.1 в канале Z.
Продолжение ПРИЛОЖЕНИЯ Б

Рисунок Б.13 – Фазовый портрет, соответствующий процессу стабилизации с НУ 5-ого варианта табл. 5.1 в канале X.

Рисунок Б.14 – Фазовый портрет, соответствующий процессу стабилизации с НУ 5-ого варианта табл. 5.1 в канале Y.
Продолжение ПРИЛОЖЕНИЯ Б

Рисунок Б.15 – Фазовый портрет, соответствующий процессу стабилизации с НУ 5-ого варианта табл. 5.1 в канале Z.

Рисунок Б.16 – Фазовый портрет, соответствующий процессу стабилизации с НУ 6-ого варианта табл. 5.1 в канале X.
Продолжение ПРИЛОЖЕНИЯ Б

Рисунок Б.17 – Фазовый портрет, соответствующий процессу стабилизации с НУ 6-ого варианта табл. 5.1 в канале Y.

Рисунок Б.18 – Фазовый портрет, соответствующий процессу стабилизации с НУ 6-ого варианта табл. 5.1 в канале Z.
ПРИЛОЖЕНИЕ В
Результаты моделирования
Начальные условия результатов моделирования заданы в табл. 5.4

Рисунок В.1 – Погрешность оценивания, для 1-ого набора коэффициентов табл. 5.2

Рисунок В.2 – Погрешность оценивания, для 2-ого набора коэффициентов табл. 5.2
Продолжение ПРИЛОЖЕНИЯ В
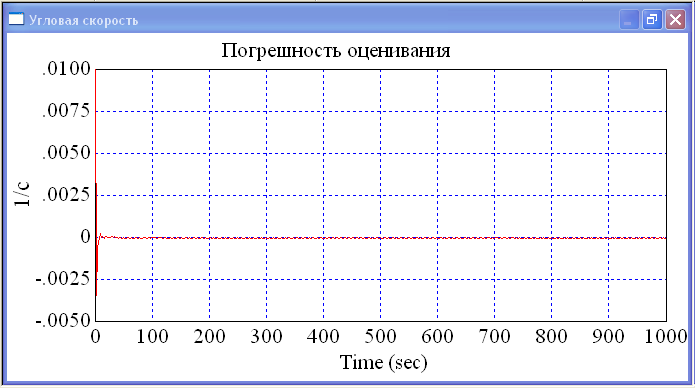
Рисунок В.3 – Погрешность оценивания, для 3-ого набора коэффициентов табл. 5.2

Рисунок В.4 – Погрешность оценивания, для 4-ого набора коэффициентов табл. 5.2
ПРИЛОЖЕНИЕ Г
Результаты моделирования
Начальные условия результатов моделирования заданы в табл. 5.3

Рисунок Г.1 – диагностика отказа 2-огго типа 1-ого ЧЭ. 1-ый вариант НУ табл 5.3

Рисунок Г.2 – диагностика отказа 2-огго типа 1-ого ЧЭ. 2-ой вариант НУ табл 5.3
Продолжение ПРИЛОЖЕНИЯ Г

Рисунок Г.3 – диагностика отказа 2-огго типа 1-ого ЧЭ. 3-ий вариант НУ табл 5.3

Рисунок Г.4 – диагностика отказа 2-огго типа 1-ого ЧЭ. 4-ый вариант НУ табл 5.3
Продолжение ПРИЛОЖЕНИЯ Г

Рисунок Г.5 – диагностика отказа 2-огго типа 1-ого ЧЭ. 5-ый вариант НУ табл 5.3
ПРИЛОЖЕНИЕ Д
Результаты моделирования

Рисунок Д.1 – Зависимость угловой скорости от времени при НУ 1-ого варианта табл 5.5

Рис. 4.2 – Зависимость угловой скорости от времени при НУ 4-ого варианта табл 5.5
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.3 – Погрешность оценивания угловой скорости от времени при НУ 1-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.

Рисунок Д.4 – Погрешность оценивания угловой скорости от времени при НУ 2-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.5 – Погрешность оценивания угловой скорости от времени при НУ 3-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.

Рисунок Д.6 – Погрешность оценивания угловой скорости от времени при НУ 4-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.7 – Погрешность оценивания угловой скорости от времени при НУ 5-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.

Рисунок Д.8 – Погрешность оценивания угловой скорости от времени при НУ 6-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.9 – Погрешность оценивания угловой скорости от времени при НУ 7-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.

Рисунок Д.10 – Погрешность оценивания угловой скорости от времени при НУ
8-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.11 – Погрешность оценивания угловой скорости от времени при НУ
9-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.

Рисунок Д.12 – Погрешность оценивания угловой скорости от времени при НУ
10-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.13 – Погрешность оценивания угловой скорости от времени при НУ
11-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.

Рисунок Д.14 – Погрешность оценивания угловой скорости от времени при НУ
12-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.15 – Погрешность оценивания угловой скорости от времени при НУ
13-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.

Рисунок Д.16 – Погрешность оценивания угловой скорости от времени при НУ
14-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.
Продолжение ПРИЛОЖЕНИЕ Д

Рисунок Д.17 – Погрешность оценивания угловой скорости от времени при НУ
15-ого варианта табл 5.5. Пунктиром выделен момент выявления отказа ДС.