Разработка виртуальной лабораторной работы на базе виртуальной асинхронной машины в среде MATLAB
ВВЕДЕНИЕ
При подготовке специалистов по всем электротехническим и электроэнергетическим специальностям важное место занимает курс электрических машин.
На сегодняшний день подготовка грамотных специалистов невозможна без применения новых форм обучения с использованием компьютерных технологий, базирующихся на современных прикладных программных продуктах.
Владение теорией электрических машин является высокой составляющей профессиональной подготовки специалиста по электрическим машинам и системам электроприводов. Современные компьютерные технологии позволяют качественно изменить и существенно улучшить технологию изучения электрических машин, перевести её в виртуальную действительность, осуществить в этой виртуальной лаборатории исследования статических и динамических режимов работы электрических машин, их механических характеристик, условий пуска и технико-экономических показателей с получением количественных результатов.
Для грамотного использования компьютерных технологий при исследовании электрических машин необходимо хорошо знать и понимать физические процессы, протекающие в электрических машинах; знать уравнения, описывающие работу электрической машины; уметь рассчитать параметры для построения математических моделей. Использование компьютерных технологий позволит расширить круг и глубину изучаемых вопросов, провести множество экспериментов с использованием виртуальных электрических машин, что благотворно скажется на уровне подготовки специалистов.
В данной работе необходимо разработать и создать виртуальные лабораторные работы для изучения асинхронных двигателей с короткозамкнутым и фазным роторами и исследовать в них переходных процессы, пусковые свойства, естественные и искусственные механические, а также рабочие характеристики. Поставленная задача реализована в наглядном и эффективном средстве визуального программирования моделей – пакете Simulink программы MATLAB.
Разрабатываемые виртуальные лабораторные работы будут намного превосходить по техническим и экономическим возможностям реальную физическую лабораторную установку. В созданных виртуальных лабораторных работах будет иметь место широчайший спектр возможностей по исследованию асинхронной машины в различных режимах работы, что в реальной лаборатории требует больших финансовых расходов из-за дороговизны необходимого оборудования.
В полученных виртуальных лабораторных работах появится возможность исследования переходных процессов в асинхронном двигателе, снятия рабочих и искусственных механических характеристик при различных значениях добавочного сопротивления в цепи ротора, напряжения и частоты питающей сети.
Большим плюсом разрабатываемых лабораторных работ является то, что виртуальную лабораторию можно использовать в дистанционном обучении студентов и в различных учебных заведениях, где нет возможности поработать в реальной лаборатории. Единственное, что необходимо для работы виртуальной лаборатории, это наличие персонального компьютера, который в наше время является общедоступным и имеется в каждом учебном заведении.
1. СИСТЕМА MATLAB
1.1 История появления MATLAB
Система MATLAB разработана специалистами компании MathWork Inc. (г. Нейтик, штат Массачусетс, США). Хотя впервые эта система начала использоваться в конце 1970-х годов, широкое распространение она получила в конце 80-х, в особенности после появления на рынке версии 4.0. Последние версии MATLAB -это системы, которые содержат множество процедур и функций, необходимых инженеру и научному работнику для осуществления сложных численных расчетов, моделирования технических и физических систем и оформления результатов этих расчетов. MATLAB (сокращение от MATrix LABoratory - матричная лаборатория) представляет собой интерактивную систему, предназначенную для выполнения инженерных и научных расчетов и ориентированную на работу с массивами данных.
В последние годы в научных и инженерно-технических кругах получила широкое распространение система MATLAB. Более того, в настоящее время она принята в качестве официального средства оформления инженерной документации и научных публикаций. Система MATLAB специально создана для проведения именно инженерных расчетов: математический аппарат, который используется в ней, предельно приближен к современному математическому аппарату инженера и ученого. Функциональные зависимости здесь организованы в форме, которую требует именно инженерная документация.
1.2 Место MATLAB среди математических программ
У системы MATLAB есть схожие черты с программами MathCad и Electronics Workbench.
Так с MathCad её роднит то, что в обои системах имеются широкие возможности по выполнению вычислений, производимых с матрицами, векторами и комплексными числами, а также графическое представление полученных результатов. Отличительной чертой является входной язык, максимально приближенный к обычному математическому языку.
А с Electronics Workbench общим является возможность создания моделей как отдельных обьектов так и систем, путём поблочного моделирования и спомощью специальных блоков наблюдать протекающие процессы в модели.
1.3 Возможности, визуализация и графические средства
Основной объект системы MATLAB - прямоугольный числовой массив (матрица), в котором допускается применение комплексных элементов. Использование матриц не требует явного указания их размеров.
Система MATLAB обеспечивает выполнение операций с векторами и матрицами даже в режиме непосредственных вычислений. Ею можно пользоваться как мощнейшим калькулятором, в котором наряду с обычными арифметическими и алгебраическими действиями могут использоваться такие сложные операции, как обращение матрицы, вычисление ее собственных значений и векторов, решение систем линейных алгебраических уравнений и много других. Характерной особенностью системы является ее открытость, то есть возможность ее модификации и адаптации к конкретным задачам пользователя.
Привлекательной особенностью системы MATLAB является наличие встроенной матричной и комплексной арифметики. Система поддерживает выполнение операций с векторами, матрицами и массивами данных, реализует сингулярное и спектральное разложение, расчет ранга и чисел обусловленности матриц, поддерживает работу с алгебраическими полиномами, решение нелинейных уравнений и задач оптимизации, интегрирование функций в квадратурах, численное интегрирование дифференциальных и разностных уравнений, построение различных графиков, трехмерных поверхностей и линий уровня.
MATLAB предоставляет широкие возможности для работы с сигналами, для расчета и проектирования аналоговых и цифровых фильтров, включая построение их частотных, импульсных и переходных характеристик. Имеются в системе и средства выполнения спектрального анализа и синтеза, в частности реализации прямого и обратного преобразования Фурье. Благодаря этому ее довольно удобно использовать при проектировании электронных устройств.
Одной из наиболее привлекательных особенностей системы MATLAB является наличие в ней наглядного и эффективного средства составления программных моделей - пакета визуального программирования Simulink.
Пакет Simulink позволяет осуществлять исследование (моделирование во времени) поведения динамических линейных и нелинейных систем, причем составление «программы» и ввод характеристик систем можно производить в диалоговом режиме, путем сборки на экране схемы соединений элементарных звеньев. В результате такой сборки получается модель системы, называемая S-моделью. В качестве «кирпичиков» при построении S-модели применяются визуальные блоки (модули), которые сохраняются в библиотеках Simulink.
S-модель может иметь иерархическую структуру, то есть состоять из моделей более низкого уровня, причем количество уровней иерархии практически не ограничено.
1.4 Средства программирования
Система обеспечивает возможность обращения к программам, которые написаны на языках FORTRAN, С и C++.
Система MATLAB использует собственный М-язык, который сочетает в себе положительные свойства различных известных языков программирования высокого уровня. С языком BASIC систему MATLAB роднит то, что она представляет собой интерпретатор (осуществляет пооператорное компилирование и выполнение программы, не образуя отдельного исполняемого файла), М-язык имеет незначительное количество операторов, в нем отсутствует необходимость объявлять типы и размеры переменных. От языка Pascal система MATLAB позаимствовала объектно-ориентированную направленность, то есть такое построение языка, которое обеспечивает образование новых типов вычислительных объектов на основе типов объектов, уже существующих в языке. Новые типы объектов (в MATLAB они называются классами) могут иметь собственные процедуры их преобразования (они определяют методы этого класса), причем новые процедуры могут быть вызваны с помощью обычных знаков арифметических операций и некоторых специальных знаков, которые применяются в математике.
Принципы сохранения значений переменных в MATLAB наиболее близки к тем, которые присущи языку FORTRAN, а именно: все переменные являются локальными - действуют лишь в границах той программной единицы (процедуры, функции или главной, управляющей программы), где им присвоены некоторые конкретные значения. При переходе к выполнению другой программной единицы, значения переменных предыдущей программной единицы либо теряются (в случае, если выполненная программная единица представляет собой процедуру или функцию), либо становятся недосягаемыми (если выполненная программа является управляющей). В отличие от языков BASIC и Pascal, в языке MATLAB нет глобальных переменных, действие которых распространялось бы на все программные единицы. Но при этом язык MATLAB обладает возможностью, которая отсутствует в других языках. Интерпретатор MATLAB позволяет в одном и том же сеансе работы выполнять несколько самостоятельных программ, причем все переменные, используемые в этих программах, являются для них общими и образуют единое рабочее пространство. Это дает возможность более рационально организовывать сложные (громоздкие) вычисления по типу оверлейных структур.
Язык программирования системы MATLAB весьма прост, он содержит лишь несколько десятков операторов; незначительное количество операторов здесь компенсируется большим числом процедур и функций, содержание которых понятно пользователю, имеющему соответствующую математическую и инженерную подготовку.
В отличие от большинства математических систем, MATLAB является открытой системой: практически все ее процедуры и функции доступны не только для использования, но и для модификации. Почти все вычислительные возможности системы можно применять в режиме чрезвычайно мощного научного калькулятора, а также составлять собственные программы, предназначенные для многоразового применения; это делает MATLAB незаменимым средством проведения научных исследований. По скорости выполнения задач MATLAB опережает многие другие подобные системы. Все эти особенности делают ее весьма привлекательной для использования.
С системой MATLAB поставляются свыше ста подробно прокомментированных М-файлов, которые содержат демонстрационные примеры и определения новых операторов и функций. Наличие этих примеров и возможность работать в режиме непосредственных вычислений значительно облегчают изучение системы пользователями, заинтересованными в применении математических расчетов.
2. АСИНХРОННЫЙ ДВИГАТЕЛЬ (АД) КАК ОБЪЕКТ ИССЛЕДОВАНИЯ
Принцип действия асинхронных машин в режимах двигателя, генератора с отдачей энергии в сеть и электромагнитного тормоза
2.1.1 Принцип действия двигателя
Асинхронной машиной называется такая машина переменного тока, скорость вращения ротора которой не находится в строгом соответствии с частотой тока сети. Как и все электрические машины, асинхронные машины обладают свойством обратимости, т. е. могут работать как в двигательном, так и в генераторном режиме.
При протекании трёхфазной системы токов по трёхфазной обмотке статора в двигателе создаётся магнитное поле с индукцией В(х), распределённой вдоль окружности воздушного зазора между статором и ротором по синусоидальному закону и вращающееся в направлении чередования фаз с угловой скоростью > 1 >(рисунок 2.1)
 ,(2.1)
,(2.1)
где f>1> – частота тока в сети;
р – число пар полюсов статора.
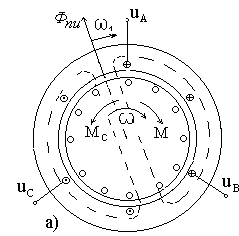
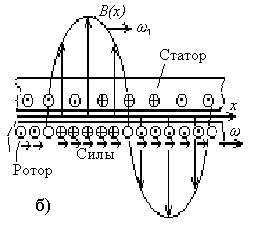
Рисунок 2.1 - а) Устройство и б) принцип действия асинхронного двигателя
Это поле обеспечивает изменяющееся во времени потокосцепление с контурами обмоток статора и ротора, индуктирующее в этих контурах ЭДС электромагнитной индукции. Под действием ЭДС ротора в проводниках его обмотки протекают переменные токи, взаимодействующие с вращающимся магнитным полем. В результате этого взаимодействия на проводники ротора действуют электромагнитные силы (силы Ампера), определяющие момент М, который может привести ротор> >во вращение с угловой скоростью > >>1> в направлении вращения поля, преодолевая момент сопротивления М>с> рабочего механизма, сочленённого с двигателем. Если бы, разгоняясь, ротор догнал вращающееся магнитное поле, то перестало бы изменяться потокосцепление обмотки ротора, исчезли бы её ЭДС и ток и, следовательно, электромагнитные силы и момент М. Ротор начал бы замедляться и скользить относительно поля. Относительную скорость проскальзывания ротора и поля называют скольжением S:
S = (>1 >- )/ >1. >(2.2)
Замедление ротора прекратится при такой скорости вращения > > >1>, при которой ЭДС и ток ротора обеспечивают момент М, равный по значению моменту сопротивления М>с >механизма, т.к. согласно уравнению движения системы механически связанных тел ускорение (замедление):
(d> >/dt)= (М – М>с>)/J, (2.3)
где J – суммарный момент инерции роторов двигателя и механизма.
Таким образом, энергия источника переменного тока (сети), подводимая к обмотке статора, превращается в механическую энергию на валу, передаваемую рабочему механизму, и частично в потери (в сопротивлениях обмоток, на трение вращающихся частей, на гистерезис и вихревые токи в ферромагнитных сердечниках статора и ротора). При этом ротор вращается со скоростью >1>, т.е. асинхронно с магнитным полем.Ротор вращается под действием электромагнитного момента М в направлении вращения магнитного поля. Следовательно, для изменения направления вращения ротора (реверса) необходимо изменить чередование фаз напряжения, подводимого к обмотке статора, т.е. поменять присоединение двух любых проводов.
2.1.2 Генераторный режим с отдачей энергии в сеть
Асинхронные машины, как и все электрические машины, обратимы и при известных условиях могут работать в генераторном режиме.
Допустим, что с помощью какого-либо первичного двигателя ротор асинхронной машины, включенной в сеть, будет вращаться в прежнем направлении, но со скоростью ω, превышающей синхронную ω>1>. При этом полярность поля статора сохраним ту же, что и в двигательном режиме. Тогда скольжение s станет отрицательным и ротор при вращении будет обгонять вращающееся магнитное поле, а его проводники будут пересекать силовые линии в направлении, обратном тому, которое было при работе машины в двигательном режиме. Вследствие этого ЭДС и токи в роторе изменяют свое на правление на обратное. В результате изменяет свое направление сила взаимодействия вращающегося поля и токов ротора, а также момент на валу, т. е. развиваемый асинхронной машиной момент становится отрицательным по отношению к моменту первичного двигателя. Таким образом, асинхронная машина будет работать генератором, преобразовывая механическую энергию, получаемую or первичного двигателя, в электрическую, отдаваемую в сеть.
2.1.3 Режим электромагнитного тормоза
В практике иногда требуется быстро затормозить асинхронный двигатель, преодолевая его инерцию, или использовать двигатель для торможения приводного механизма, например для уменьшения скорости при спуске грузов в крановых и подъемных сооружениях.
В режиме тормоза асинхронная машина будет работать в том случае, если ротор приводится во вращение посторонним усилием в сторону, противоположную вращению поля (режим противовключения). Совершенно очевидно, что в этом случае вращающий момент будет направлен против направления вращения ротора и будет его тормозить. Чтобы перейти в тормозной режим работы, двигатель должен вначале остановиться, т. е. его скольжение s = +1. Для осуществления этого режима необходимо в цепь ротора включить значительное сопротивление. После остановки двигателя, ротор, приводимый во вращение посторонним усилием, начнет вращаться в сторону, противоположную вращению поля, и его скорость следует считать отрицательной по отношению к скорости поля ω>1>. Следовательно, при работе в тормозном режиме скольжение s>+l.
Для быстрой остановки двигателя также используют режим противовключения асинхронных двигателей переключением двух из трех питающих статор проводов. При этом направление вращения поля становится противоположным направлению вращения ротора, который продолжает вращаться за счет силы инерции.
Для уменьшения возникающего при этом всплеска тока в цепь ротора включается реостат, подобно тому, как это было при пуске двигателя. Как известно, при включении в цепь ротора активного сопротивления максимальное значение момента смещается в сторону большего скольжения. Кроме увеличения тормозного момента реостат уменьшает большие величины токов, получающиеся в двигателе при противовключении.
2.2 Устройство асинхронных двигателей
Основными частями асинхронного двигателя являются неподвижный статор и вращающийся внутри него ротор, отделенный от статора воздушным зазором. С целью уменьшения вихревых токов сердечники ротора и статора собираются из отдельных листов, отштампованных из электротехнической стали и изображенных на рисунке 2.2. Листы изолируются друг от друга тонким слоем лака (в маломощных машинах - слоем окалины).
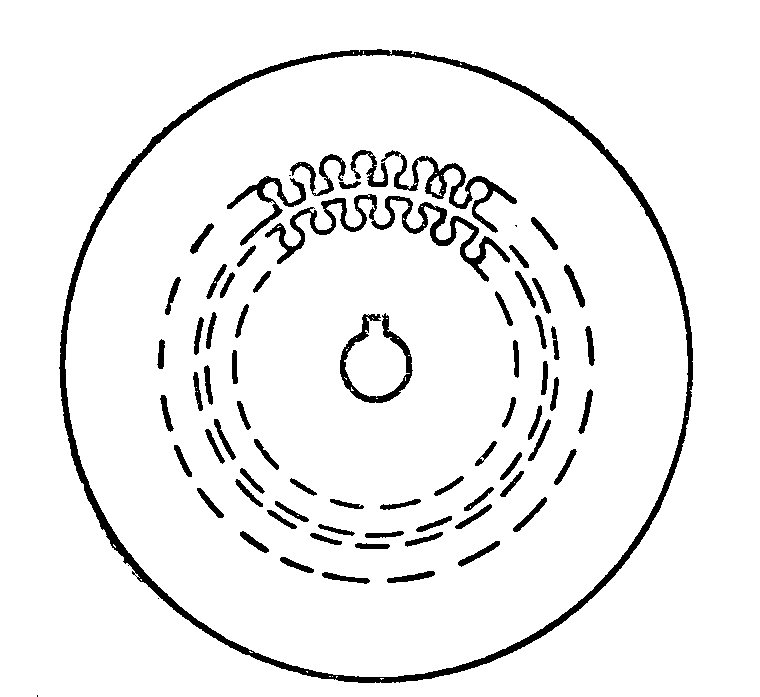
Рисунок 2.2 - Листы сердечника статора и ротора асинхронного двигателя
Сердечник статора встраивается в корпус, являющийся внешней частью машины. Сердечник ротора укрепляется либо непосредственно на валу двигателя, либо на втулке, выполненной в форме крестовины и надетой на вал двигателя. Вал вращается в подшипниках, которые укреплены в торцовых щитах двигателя, называемых подшипниковыми щитами.
Поскольку магнитный поток асинхронного двигателя создается подключенной к сети обмоткой статора, то и намагничивающий ток потребляется двигателем из сети. С целью уменьшения величины этого тока магнитное сопротивление потоку должно быть как можно меньше. Для этого величина воздушного зазора принимается настолько малой, насколько это возможно по соображениям механической конструкции. У машин малой мощности зазор равен 0,3 мм, а у машин большой мощности 1,5 мм. В синхронных машинах, у которых основной поток создается постоянным током, воздушный зазор гораздо больше: он достигает 3-15 мм. Статор асинхронного двигателя ничем не отличается от статора синхронной машины. Как уже было сказано, сердечник статора набирается из отдельных изолированных листов, которые для лучшего охлаждения делятся воздушными каналами на отдельные пакеты. Трёхфазная распределённая обмотка статора асинхронного двигателя, уложена в изолированные пазы статора. Пазы статора, как правило, имеют полузакрытую форму, при которой сохраняется удобство укладки обмотки в пазы и, кроме того, удается получить наименьшие значения тока намагничивания, от которого в свою очередь зависит также и коэффициент мощности cos двигателя. Обмотка статора выполняется из медных изолированных проводников.
Ротор асинхронного двигателя в зависимости от вида обмотки может быть выполнен фазным или короткозамкнутым. Роторы выполняются из листов электротехнической стали, собранных между двумя нажимными шайбами. Пазы ротора (обычно полузакрытой формы) идут вдоль оси машины и равномерно расположены на поверхности по всей окружности.
Наиболее проста конструкция короткозамкнутого ротора, в пазы которого укладываются круглые или прямоугольные стержни из меди или алюминия, неизолированные, замкнутые накоротко на обоих концах ротора при помощи медных или алюминиевых колец большого сечения. Такого рода обмотку принято называть «беличьей клеткой» (рисунок 2.3), она очень прочна, дешева и надежна в работе.
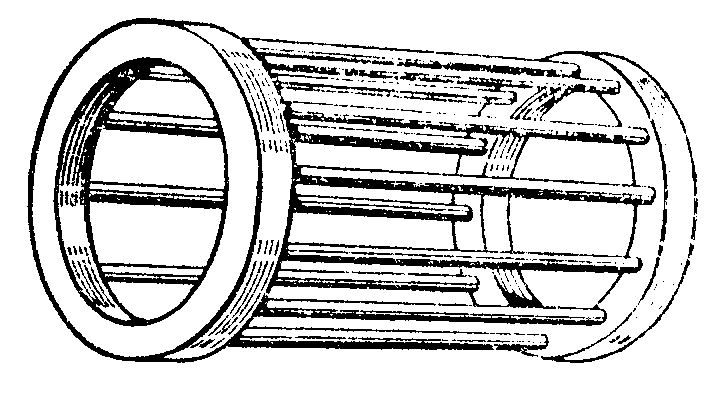
Рисунок 2.3 - Короткозамкнутая обмотка ротора асинхронного двигателя
При Р>н >≤ 100кВт современные короткозамкнутые роторы часто выполняются в виде клетки, изготовляемой заливкой пазов ротора алюминием. Стержни и замыкающие кольца с вентиляционными лопатками представляют собой в этом случае одну цельную отливку.
Ротор асинхронной машины с фазными обмотками - фазный ротор - имеет в пазах трехфазную обмотку, аналогичную обмотке статора. Фазы обмотки соединены в звезду, а выводы обмотки присоединяются к медным контактным кольцам, укрепленным на валу машины и изолированным как друг от друга, так и от вала. На контактных кольцах установлены щётки, выводы от которых расположены в коробке выводов. К этим выводам подключают пусковые или регулировочные реостаты.
2.3 Асинхронные двигатели с улучшенными пусковыми свойствами
Значительное улучшение пусковых характеристик асинхронных двигателей с короткозамкнутым ротором достигается изменением конструкции ротора. В качестве таких конструкций широко используют роторы с двойной короткозамкнутой обмоткой и с глубокими пазами.
2.3.1 АД с глубокопазным ротором
В двигателях с глубокими пазами на роторе его короткозамкнутая обмотка выполняется в виде тонких высоких полос (рисунок 2.4). При такой конструкции обмотки происходит оттеснение тока к верхней части проводников вследствие того, что нижние части проводников сцеплены с большим числом магнитных линий потока рассеяния, чем верхние части.
Таким образом, ток, протекающий по проводникам, стремится сконцентрироваться преимущественно в верхней их части, что равносильно уменьшению поперечного сечения или увеличению активного сопротивления этих проводников.
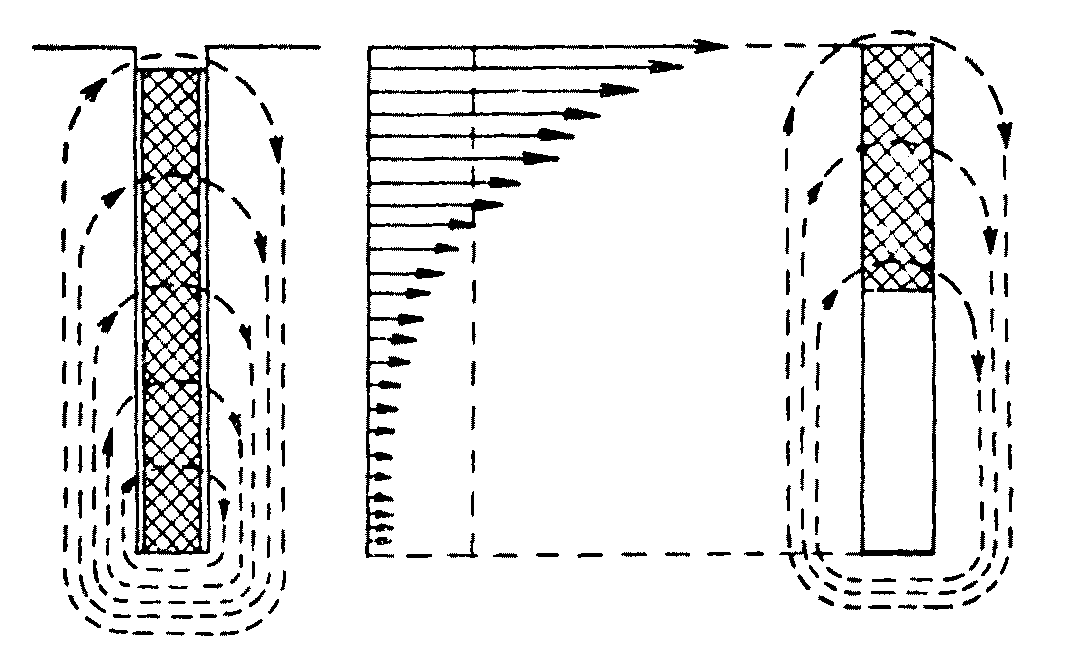
а) б) в)
Рисунок 2.4 - Схема устройства ротора с глубокими пазами и явление вытеснения тока: а) магнитное поле; б) диаграмма распределения плотности тока; в) рабочая часть проводника
Это явление оттеснения тока в верхние части проводников особенно сильно сказывается в момент включения двигателя, когда частота тока в роторе равна частоте тока сети и, следовательно, при пуске в ход увеличивается активное сопротивление обмотки ротора, в результате чего возрастает пусковой момент. При увеличении скорости вращения ротора частота тока в его обмотке уменьшается, и ток более равномерно распределяется по сечению стержней и при нормальной скорости вращения неравномерность распределения тока по поперечному сечению стержней почти полностью исчезает.
Пусковой момент двигателей этого типа М>П> = (1,2 - 1,5)М>Н>.
2.3.2 АД с двойной короткозамкнутой обмоткой ротора
Ротор этого типа имеет две короткозамкнутые обмотки, выполненные в виде беличьих клеток (рисунок 2.5).
Число пазов верхней А и нижней Б клеток может быть одинаково или различно.
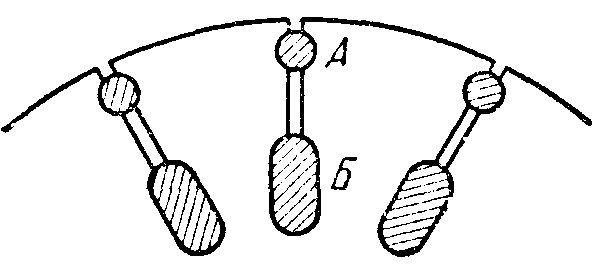
Рисунок 2.5 - Схема устройства ротора с двойной короткозамкнутой обмоткой
Верхняя клетка А выполнена из стержней малого поперечного сечения, а нижняя Б - из стержней большого поперечного сечения. Поэтому активное сопротивление обмотки А оказывается значительно большим, чем активное сопротивление обмотки Б (r>A>> >> r>Б>).
Вследствие того что стержни внутренней обмотки Б глубоко погружены в тело ротора и окружены сталью, индуктивное сопротивление внутренней обмотки значительно больше, чем индуктивное сопротивление внешней обмотки (Х>Б >>>X>A>).
При пуске в ход ток в основном протекает по проводникам внешней обмотки А, имеющей меньшее индуктивное и большее активное сопротивление. Эта обмотка называется пусковой.
В рабочем режиме скольжение мало и, следовательно, частота тока в роторе также мала. Поэтому индуктивные сопротивления обмоток не имеют значения и токи в обмотках А и Б обратно пропорциональны активным сопротивлениям.
Таким образом, в рабочем режиме ток в основном протекает по проводникам внутренней обмотки Б, имеющей меньшее активное сопротивление. Эта обмотка называется рабочей.
При такой конструкции ротора увеличивается активное сопротивление его обмотки в момент пуска в ход двигателя, что увеличивает пусковой момент.
Таким образом, в двигателях с двойной короткозамкнутой обмоткой и с глубокими пазами пусковые моменты больше и пусковые токи меньше, чем у обычных короткозамкнутых двигателей.
Однако рабочие характеристики этих двигателей несколько хуже, чем обычных короткозамкнутых двигателей - несколько меньше cos, КПД и максимальный момент, так как у этих двигателей больше потоки рассеяния, т.е. больше индуктивные сопротивления обмоток ротора, чем у двигателей нормальной конструкции.
2.4 Способы пуска АД с коротокамкнутым ротором
К асинхронным двигателям предъявляются требования по пусковым характеристикам, так как вопросы связанные с пуском в ход, имеют большое значение. При решении вопросов пусковых характеристик необходимо учитывать, с одной стороны, условия работы сети, к которой подключается асинхронный двигатель, и, с другой стороны, требования, которые предъявляются к приводу. Оценка пусковых свойств двигателя производится по пусковым характеристикам, к которым следует отнести начальный пусковой ток I>п>, или его кратность I>п>/I>н> и начальный пусковой момент М>п> или его кратность М>п>/М>н>.
Способы пуска АД с короткозамкнутым ротором: прямой пуск, реакторный и автотрансформаторный.
2.4.1 Прямой пуск АД
В настоящее время в связи со значительным ростом мощностей энергетических систем пуск в ход короткозамкнутых асинхронных двигателей в преобладающем большинстве случаев осуществляется очень простым способом (рисунок 2.6), а именно непосредственным включением в сеть.
В первый момент пуска, когда скорость вращающегося магнитного поля ω>1> относительно неподвижного ротора (ω = 0) имеет наибольшую величину, в обмотке ротора будет наводиться значительная ЭДС, величина которой во много раз превышает номинальное значение при вращающемся роторе. Например, если при номинальной нагрузке двигателя скольжение составляет s>ном> = 0,05, а ЭДС в роторе E>2>>ном>, то в начальный момент пуска при стоянке ротора, когда s = 1, т. е. в начальный момент пуска ЭДС, наводимая в роторе, будет в 20 раз больше, чем при номинальной нагрузке.
Соответственно значительно возросшей ЭДС ротора ток, создаваемый ею в роторе при пуске, также будет большим, превышающим номинальный в несколько (до восьми) раз. То обстоятельство, что кратность пускового тока в роторе меньше кратности ЭДС, объясняется увеличением реактивного сопротивления ротора при увеличении частоты тока, которая в начальный момент пуска достигает частоты статора.
Пусковой ток в обмотке статора при этом будет весьма значительным, превышающим в несколько раз номинальный. Современные двигатели с короткозамкнутым ротором имеют кратность пускового тока, составляющую 4-7 от номинального.
Поскольку большинство двигателей и приводимых ими механизмов имеет относительно небольшую инерцию, скорость двигателей при пуске достаточно быстро увеличивается до значения, соответствующего моменту нагрузки. Период пуска продолжается обычно не более нескольких секунд, вследствие чего пусковые токи статора и ротора не представляют опасности для двигателя, так как нагрев обмоток не успевает достигнуть опасных температур. Значение пускового момента находится в пределах 0,8-1,5 от номинального.
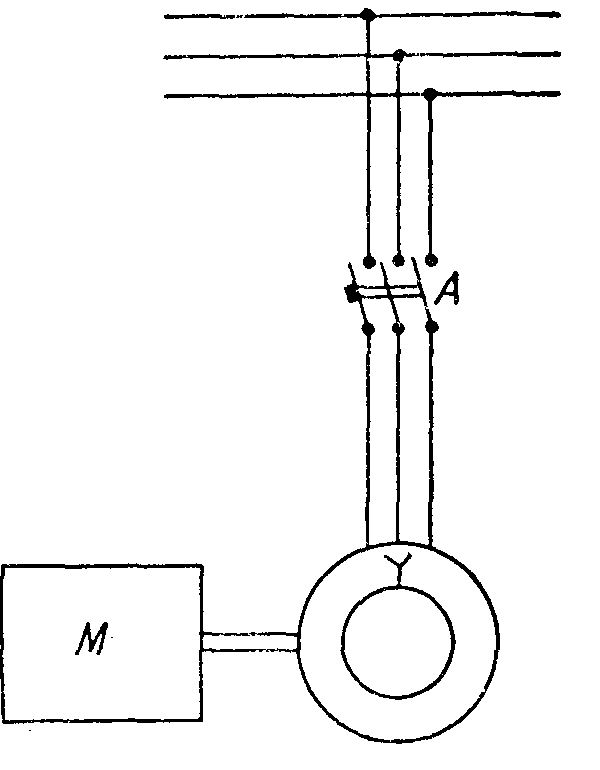
Рисунок 2.6 - Схема прямого пуска асинхронного короткозамкнутого двигателя
2.4.2 Реакторный и автотрансформаторный пуск АД
Недостаток прямого пуска: понижение напряжения сети из-за большого пускового тока I>п>, если мощность двигателя соизмерима с мощностью сети.
Для уменьшения I>п> и уменьшения падения напряжения сети, к двигателю подводится пониженное напряжение с помощью реактора или автотрансформатора.
При реакторном пуске в качестве пускового сопротивления обычно используется индуктивное сопротивление (реактор), включаемое на время пуска двигателя последовательно с обмоткой его статора.
Пуск осуществляется в следующем порядке. На первой стадии пуска подключается индуктивное сопротивление, после чего двигатель начинает вращаться. Когда скорость вращения достигает определенного значения, индуктивное сопротивление выключается (шунтируется) и к двигателю подается полное напряжение.
Если обозначить уменьшения тока I>п> коэффициентом К>I>, то, при реакторном пуске пусковой момент двигателя уменьшаются в K2>I> раз.
Для понижения напряжения, подводимого к двигателю при пуске, можно использовать также автотрансформатор. Этот способ, как и предыдущий, требует специального пускового аппарата - автотрансформатора, который удорожает установку. Если обозначить через К>А> коэффициент трансформации автотрансформатора, то, как показывает подробный анализ, который здесь не приводится, при пуске этим способом пусковой ток в сети и пусковой момент двигателя уменьшаются в K2>A> раз. В этом случае величина пускового момента при прочих равных условиях будет больше, чем при реакторном пуске, что, безусловно, является преимуществом способа пуска короткозамкнутых асинхронных двигателей с помощью автотрансформатора.
2.5 Способы пуска АД с фазным ротором
В тех случаях, когда требуется большое значение пускового вращающего момента, используют асинхронные двигатели с фазным ротором.
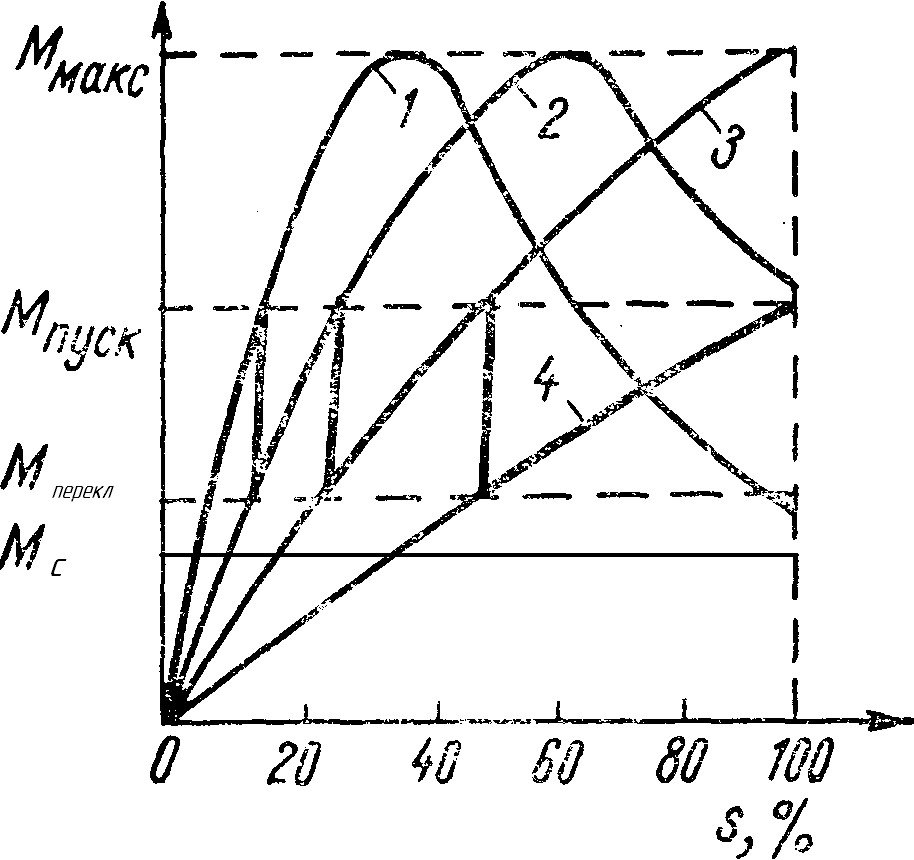
Пуск этих двигателей осуществляется с помощью активных сопротивлений (реостатов), последовательно включаемых в цепь ротора (рисунок 2.7, а).
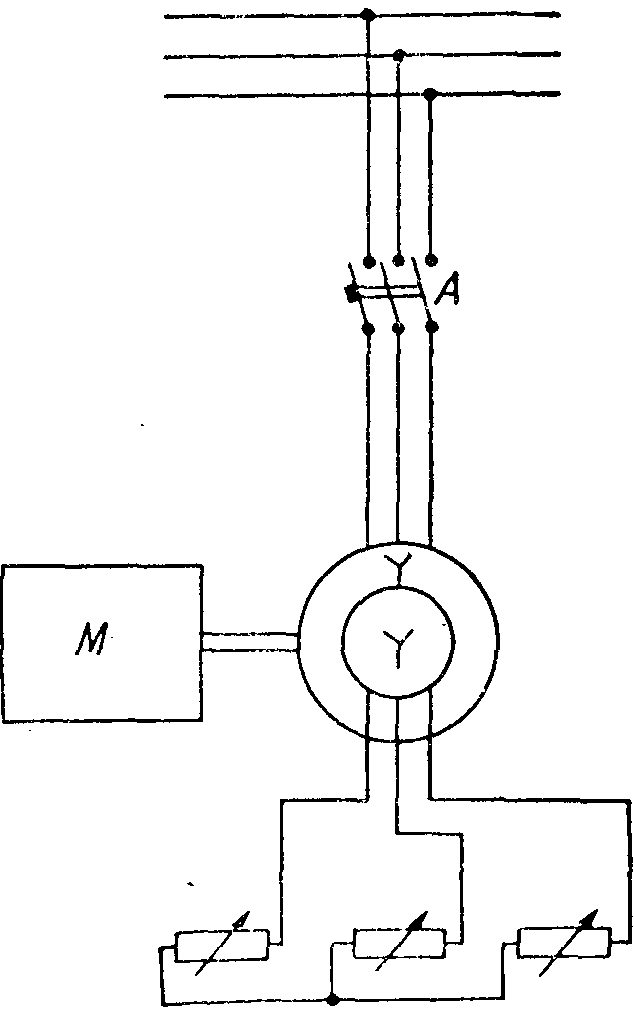
а) б)
Рисунок 2.7 - а) схема пуска асинхронного двигателя с фазным ротором, б) кривые зависимости вращающего момента от скольжения при различных значениях пусковых сопротивлений
Реактивное сопротивление ротора Х>2> всегда больше его активного сопротивления, вследствие чего для увеличения пускового момента двигателя необходимо вводить в цепь ротора активное добавочное сопротивление. Благодаря этому активное сопротивление цепи ротора увеличивается, что приводит к снижению как величины тока ротора I>2>, так и пускового тока статора I>1>. Значит, при определенных условиях, несмотря на уменьшение тока I>2>, вращающий момент может даже увеличиться. Подключение двигателя к сети при сниженном пусковом токе, не будет вызывать резких изменений ее напряжения.
Для того чтобы величина момента при разгоне двигателя изменялась в меньших пределах и пуск проходил быстрее, пуск выполняют ступенчатым.
Двигатель с фазным ротором, пускаемый в ход с помощью ступенчатого пускового реостата, обладает хорошими пусковыми характеристиками, позволяющими сохранить за все время разбега большой пусковой момент, сокращая тем самым время разгона.
Пусковые реостаты обычно изготовляются трехфазными из металлической проволоки или ленты повышенного удельного сопротивления (нихром, фехраль). Величину сопротивления выбирают с таким расчетом, чтобы отношение пускового и номинального токов I>п>/I>ном> было равно 2-2,5.
На рисунке 2.7, б изображены кривые зависимости вращающего момента от скольжения при различных значениях пусковых сопротивлений в процессе пуска асинхронных двигателей с фазным ротором.
2.6 Регулирование скорости АД с короткозамкнутым ротором
Изменение скорости вращения двигателей с короткозамкнутым ротором возможно при изменении частоты f>1>, U>1> и числа пар полюсов р. К способам регулирования скорости предъявляются весьма высокие требования как в отношении их экономичности и надежности в работе, так и в отношении пределов и плавности регулирования.
2.6.1 Регулирование скорости изменением частоты питающей сети
Частота промышленных сетей f>1 >обычно постоянна и равна 50 Гц. Поэтому для изменения частоты питающей сети требуется применять преобразователь частоты. Следует иметь в виду, что при изменении частоты напряжения на зажимах, магнитный поток, ток холостого хода, вращающий момент, мощность и другие параметры машины в общем случае также не остаются постоянными. Механические характеристики при изменении частоты f>1> и постоянном напряжении представлены на рисунке 2.8.
При регулировании скорости желательно сохранять перегрузочную способность, для этого необходимо одновременно и пропорционально изменять частоту и ЭДС обмотки статора или питающее напряжение U>1>, так как оно мало отличается от ЭДС. Этот способ позволяет обеспечить широкий диапазон плавного и экономичного регулирования скорости. Механические характеристики при этом способе регулирования скорости представлены на рисунке 2.9.

Рисунок 2.8 - Механические характеристики при различных частотах и неизменном напряжении
Рисунок 2.9 - Механические характеристики при пропорциональном изменении частоты и напряжения
2.6.2 Регулирование скорости изменением числа пар полюсов
Так как скорость вращения вращающегося поля ω>1 >= 60f>1>/p, при постоянном значении частоты сети f>1 >зависит только от числа пар полюсов этого поля, то, изменяя его, можно изменить также и скорость вращения ротора двигателя. Этот способ дает возможность регулировать скорость вращения асинхронного двигателя без таких больших потерь мощности, как при реостатном способе, что достигается за счет усложнения и удорожания конструкции машины.
Ввиду того, что число пар полюсов р может быть только целым числом, при переключении числа пар полюсов изменение скорости будет происходить ступенчато. Такие двигатели часто называются многоскоростными.
Разместив на статоре две отдельные обмотки (одну на р пар полюсов, а другую на p>1> пар полюсов) и включая их поочередно, можно получить две скорости вращения поля, а следовательно, и две скорости вращения ротора. Отношение скоростей будет обратно пропорционально отношению числа пар полюсов.
Ротор двигателя при этом должен иметь короткозамкнутую обмотку, для которой число полюсов создаваемого поля всегда равно числу полюсов вращающегося поля обмотки статора.
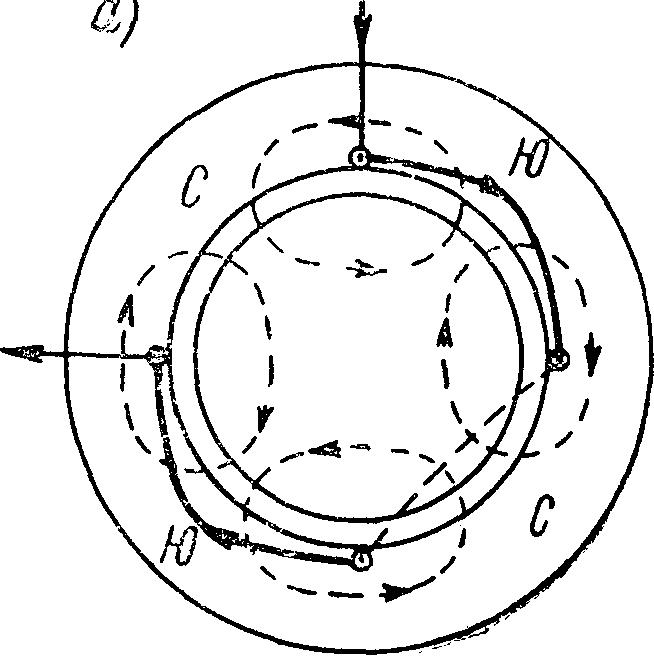
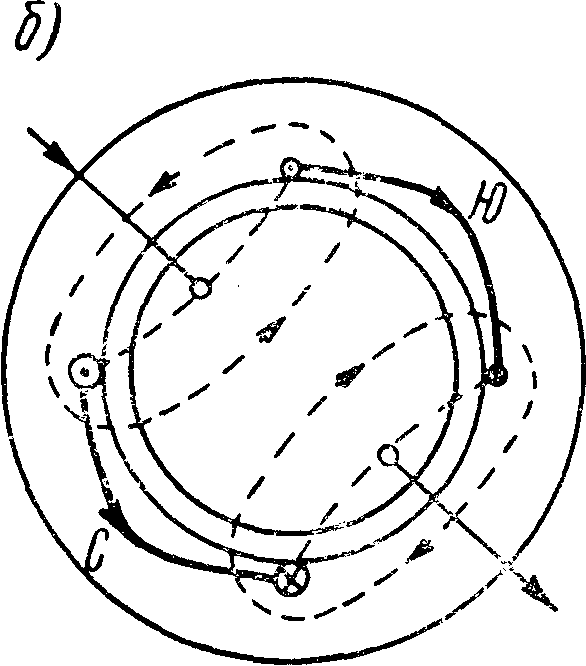
Рисунок 2.10 - Изменение числа пар полюсов асинхронного двигателя переключением цепей обмотки статора: а - при большем числе полюсов; б - при числе полюсов в 2 раза меньшем
Более простым и дешевым является способ, при котором на статоре укладывается одна обмотка, позволяющая производить изменение числа пар полюсов обмотки статора. Увеличение или уменьшение пар полюсов, например, вдвое может быть произведено сравнительно просто. Для этого каждая фаза обмотки статора делится на две одинаковые части - полуобмотки и в одной из них изменяется направление тока.
На рисунке 2.10 показаны схемы обмотки статора при изменении числа пар полюсов в отношении 2:1.
Следовательно, при переключении числа пар полюсов могут быть изменены характеристики обмотки и индукция в воздушном зазоре.
Различными способами переключения числа пар полюсов можно осуществить работу двигателя в двух режимах: 1) сохраняя постоянство вращающего момента и изменение мощности пропорционально скорости вращения (переключение обмотки со звезды на двойную звезду); 2) сохраняя примерное постоянство мощности и изменение вращающего момента обратно пропорционально скорости вращения (переключение обмотки с треугольника на двойную звезду).
Асинхронные двигатели с переключением числа пар полюсов изготовляют в основном как двухскоростные и реже (небольшой мощности) как трех- и четырехскоростные. Трех- и четырехскоростные двигатели выпускают с двумя обмотками на статоре, причем одну из них или обе выполняют с переключением числа пар полюсов.
К недостаткам многоскоростных двигателей следует отнести их увеличенные размеры по сравнению с нормальными асинхронными двигателями и более высокую стоимость.
2.6.3 Регулирование скорости изменением напряжения источника питания
Диапазон регулирования скорости не большой и снижается с уменьшением нагрузки, так как максимальный момент, развиваемый двигателем, зависит от квадрата напряжения источника питания. Так при уменьшении напряжения в 2 раза, максимальный момент уменьшится в 4 раза. Способ целесообразно применять для двигателей с повышенным скольжением (мягкой характеристикой) иначе диапазон регулирования будет незначительным. Серийно выпускаются тиристорные и транзисторные регуляторы напряжения.
2.7 Регулирование скорости АД с фазным ротором
Для АД с фазным ротором используются следующие способы регулирования скорости: реостатный, изменением питающего напряжения, и введением добавочной ЭДС в цепь ротора.
Схема регулирования скорости вращения асинхронных двигателей с фазным ротором при помощи реостата в цепи ротора не отличается от схемы пуска, изображенной на рисунке 2.7, а.
Как это было показано выше (см. рисунок 2.7, б), увеличение активного сопротивления в цепи ротора делает механическую характеристику более пологой, что приводит к увеличению скольжения, а следовательно, к уменьшению скорости вращения.
Этот способ дает возможность регулировать скорость вращения в широких пределах от номинальной до полной остановки. Плавность регулирования скорости будет зависеть от числа ступеней.
Однако такой способ регулирования скорости неэкономичен, так как он связан с большими непроизводительными потерями энергии в реостатах.
Однако, несмотря на неэкономичность этого способа регулирования скорости вращения асинхронного двигателя, он довольно часто применяется на практике, в основном для регулирования скорости вращения двигателей небольшой мощности и при кратковременной работе на малых скоростях.
Также регулирование скорости можно получить путём одновременного ввода добавочного сопротивления в цепь ротора и понижением напряжения источника питания. При таком способе необходимо учесть, что максимальный момент уменьшается пропорционально квадрату напряжения, а также механическая характеристика становится мягче.
3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ АСИНХРОННОЙ МАШИНЫ
3.1 Математическое описание обобщённой машины
Обобщённая асинхронная машина содержит трёхфазную обмотку на роторе и статоре. Обмотки подключены к симметричным источникам напряжения. Математическое описание такой машины базируется на известных законах.
Уравнения равновесия ЭДС на обмотках статора и ротора базируется на втором законе Кирхгофа.
Для статора: Для ротора:
 (3.1)
(3.1)
В уравнениях (3.1) фигурируют мгновенные напряжения, токи и потокосцепления статора и ротора, а также активные сопротивления обмоток. Обычно обмотки выполняются симметричными, к поэтому R>А>=R>В>=R>С>=Rs - активное сопротивление статорной обмотки, R>а>=R>b>=R>с>=R>R> - активное сопротивление роторной обмотки.
Вторым используемым законом является закон Ампера, который связывает потокосцепления обмоток с токами, протекающими по обмоткам:
Для статора:
 (3.2 а)
(3.2 а)
Для ротора:
 (3.2 б)
(3.2 б)
Удивительно симметричные уравнения для определения потокосцеплений показывают, что потокосцепление каждой обмотки зависит от токов во всех обмотках; эти зависимости проявляются через взаимоиндукцию. В уравнениях (3.2) L>АА>, L>BB>, L>CC,> L>aa>, L>bb>, L>cc>>,> являются собственными индуктивностями соответствующих обмоток, все остальные - взаимоиндуктивностями между соответствующими обмотками.
Третьим законом, лежащим в основе анализа, является второй закон Ньютона - закон равновесия моментов на валу машины:
 (3.3)
(3.3)
где J
(кгм2)
- момент инерции на валу
машины, учитывающий инерционность как
самой машины, так и приведенной к валу
инерционности рабочего механизма и
редуктора,
 -
угловая скорость вала машины,
-
угловая скорость вала машины,
 (Нм)
- момент рабочего механизма,
приведенный к валу, в общем случае он
может быть функцией скорости и угла
поворота,
(Нм)
- момент рабочего механизма,
приведенный к валу, в общем случае он
может быть функцией скорости и угла
поворота,
 .
.
Наконец, четвертым и последним законом, лежащим в основа анализа машины, является закон, сформулированный Ленцем, как правило левой руки. Этот закон связывает векторные величины момента, потокосцепления и тока:
 .(3.4)
.(3.4)
Следует сразу подчеркнуть, что, несмотря на полное и строгое математическое описание, использование уравнений (3.1) - (3.4) для исследования машины встречает серьезные трудности. Из них основные:
- в уравнениях (3.3 и 3.4) фигурируют векторные величины, а в уравнениях (3.1 и 3.2) скалярные;
- количество взаимосвязанных уравнений равно 16, а количество коэффициентов - 44;
- коэффициенты взаимоиндукции между обмотками статора и ротора в уравнениях (3.2) являются функцией угла поворота ротора относительно статора, то есть уравнения (3.2) являются уравнениями с переменными коэффициентами;
- уравнение (3.4) является нелинейным, так как в нем перемножаются переменные.
3.2 Метод пространственного вектора
На пути упрощения математического описания асинхронной машины, да и вообще всех машин переменного тока, удивительно удачным и изящным оказался метод пространственного вектора, который позволил существенно упростить и сократить вышеприведенную систему уравнений; метод позволяет связать уравнения (3.1-3.4) в единую систему с векторными переменными состояния. Суть метода состоит в том, что мгновенные значения симметричных трехфазных переменных состояния (напряжения, токи, потокосцепления) можно математически преобразовать так, чтобы они были представлены одним пространственным вектором. Это математическое преобразование имеет вид (например, для тока статора):
 (3.5)
(3.5)
где
 -
векторы, учитывающие пространственное
смещение обмоток,
-
векторы, учитывающие пространственное
смещение обмоток,
 -
симметричная трехфазная система токов
статора.
-
симметричная трехфазная система токов
статора.
Подставив в уравнения (3.5) значение мгновенных токов, найдем математическое описание пространственного вектора статорного тока:
 (3.6)
(3.6)
На рис. 3.1
представлена геометрическая интерпретация
пространственного вектора тока
- это вектор на комплексной
плоскости с модулем (длиной) I>m>,
вращающийся с угловой скоростью
в положительном направлении. Проекции
вектора
 на фазные оси А, В, С определяют мгновенные
токи в фазах. Аналогично пространственными
векторами можно представить все
напряжения, токи и потокосцепления,
входящие в уравнения
(3.1), (3.2).
на фазные оси А, В, С определяют мгновенные
токи в фазах. Аналогично пространственными
векторами можно представить все
напряжения, токи и потокосцепления,
входящие в уравнения
(3.1), (3.2).
Теперь можно переходить к упрощению уравнений.
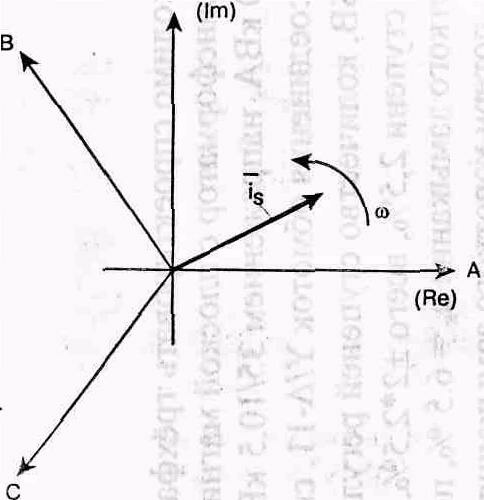
Рисунок 3.1 - Пространственный вектор тока
Шаг первый. Для
преобразования уравнений
(3.1) в мгновенных значениях
к уравнениям в пространственных векторах
умножим их на выражения: первые уравнения
на
 ,
вторые –
на
,
вторые –
на
 ,
третьи – на
,
третьи – на
 ,
- и сложим раздельно для статора и ротора.
Тогда получим:
,
- и сложим раздельно для статора и ротора.
Тогда получим:
 (3.7)
(3.7)
где L>S>, L>R> - собственные индуктивности статора и ротора, L>m>() -взаимная индуктивность между статором и ротором. Таки образом, вместо двенадцати уравнений (3.1)-(3.2) получено лишь четыре уравнения (3.7).
Шаг второй. Переменные коэффициенты взаимной индукции уравнениях для потокосцеплений (3.7) являются результатом того, что уравнения равновесия ЭДС для статора записаны в неподвижно системе координат, связанной со статором, а уравнения равновесия ЭДС для ротора записаны во вращающейся системе координат, связанной с ротором. Метод пространственного вектора позволяет записать эти уравнения в единой системе координат, вращающейся произвольной скоростью >к>. В этом случае уравнения (3.7) преобразуются к виду:
 (3.8)
(3.8)
где = р•>m>, р - число пар полюсов в машине.
В уравнениях (3.8) все коэффициенты являются величинами постоянными, имеют четкий физический смысл и могут быть определены по паспортным данным двигателя, либо экспериментально.
Шаг третий. Этот
шаг связан с определением момента.
Момент в уравнении
(3.4) является векторным
произведением любой пары векторов. Из
уравнения (3.8)
следует, что таких пар может быть шесть
 .
Часто в рассмотрение
вводится потокосцепление взаимной
индукции
.
Часто в рассмотрение
вводится потокосцепление взаимной
индукции
 .
В этом случае появляется ещё четыре
возможности представления электромагнитного
момента машины через следующие пары:
.
В этом случае появляется ещё четыре
возможности представления электромагнитного
момента машины через следующие пары:
 .
После выбора той или иной пары уравнение
момента приобретает определенность, а
количество уравнений в системе
(3.8) сокращается до двух.
Кроме того, в уравнениях
(3.3) и
(3.4) векторные величины
момента и скорости могут быть заменены
их модульными значениями. Это является
следствием того, что пространственные
векторы токов и потокосцеплений
расположены и плоскости, перпендикулярной
оси вращения, а векторы момента и угловой
скорости совпадают с осью. В качестве
примера запись уравнений момента через
некоторые пары переменных состояния
машины имеет вид:
.
После выбора той или иной пары уравнение
момента приобретает определенность, а
количество уравнений в системе
(3.8) сокращается до двух.
Кроме того, в уравнениях
(3.3) и
(3.4) векторные величины
момента и скорости могут быть заменены
их модульными значениями. Это является
следствием того, что пространственные
векторы токов и потокосцеплений
расположены и плоскости, перпендикулярной
оси вращения, а векторы момента и угловой
скорости совпадают с осью. В качестве
примера запись уравнений момента через
некоторые пары переменных состояния
машины имеет вид:
 (3.9)
(3.9)
В конечном виде уравнения обобщённой асинхронной машины имеют вид:
 (3.10)
(3.10)
3.3 Математическая модель асинхронной машины в осях, вращающихся с произвольной скоростью
Уравнения асинхронной машины с
короткозамкнутым ротором или машины с
фазной обмоткой, если к ней не подключено
питающее напряжение, можно получить из
уравнений (3.10), если в этих уравнениях
положить
 .
.

 (3.11)
(3.11)
Для динамических систем необходимо
учитывать переходные электромагнитные
процессы в машине. В этом случае в
качестве пары переменных, описывающих
машину, оставим пространственные векторы
тока статора и потокосцепления ротора
( ),
тогда уравнения
(3.11) с учётом уравнений
для потокосцеплений (3.8) после
соответствующих преобразований примут
вид:
),
тогда уравнения
(3.11) с учётом уравнений
для потокосцеплений (3.8) после
соответствующих преобразований примут
вид:
 (3.12)
(3.12)
где
 -
коэффициенты.
-
коэффициенты.
3.4 Математическая модель асинхронной машины в неподвижной системе координат
Для того чтобы лучше понять физические процессы, происходящие в асинхронной машине, исследуем машину в неподвижной системе координат.
В неподвижной комплексной системе
координат ( )
вещественная ось
обозначается через ,
а мнимая через .
Пространственные векторы в этом случае
раскладываются по осям:
)
вещественная ось
обозначается через ,
а мнимая через .
Пространственные векторы в этом случае
раскладываются по осям:
 .
Подставив эти значения в уравнения
(3.12) и приравняв отдельно
вещественные и мнимые части, получим:
.
Подставив эти значения в уравнения
(3.12) и приравняв отдельно
вещественные и мнимые части, получим:
 (3.13)
(3.13)
4. РАЗРАБОТКА МОДЕЛИ АСИНХРОННОГО ДВИГАТЕЛЯ (АД) В ПРОГРАММЕ MATLAB
4.1 Пакет визуального программирования Simulink
Одной из наиболее привлекательных особенностей системы MATLAB является наличие в ней наглядного и эффективного средства составления программных моделей - пакета визуального программирования Simulink.
Пакет Simulink позволяет осуществлять исследование (моделирование во времени) поведения динамических линейных и нелинейных систем, причем составление «программы» и ввод характеристик систем можно производить в диалоговом режиме, путем сборки на экране схемы соединений элементарных (стандартных или пользовательских) звеньев. В результате такой сборки получается модель системы (называемая S-моделью), которая сохраняется в файле с расширением *.mdl. Такой процесс составления вычислительных программ принято называть визуальным программированием.
S-модель может иметь иерархическую структуру, то есть состоять из моделей более низкого уровня, причем количество уровней иерархии практически не ограничено. В процессе моделирования есть возможность наблюдать за процессами, которые происходят в системе. Для этого используются специальные блоки («обзорные окна»), входящие в состав библиотеки Simulink. Библиотека может быть пополнена пользователем за счет разработки собственных блоков.
Создание моделей в пакете Simulink основывается на использовании технологии Drag-and-Drop (шаг за шагом). В качестве «кирпичиков» при построении S-модели применяются визуальные блоки (модули), которые сохраняются в библиотеках Simulink.
Библиотека блоков Simulink (рисунок 4.1) – это набор визуальных объектов, при использовании которых, соединяя отдельные блоки между собой линиями связей, можно составлять функциональную блок-схему любого устройства.
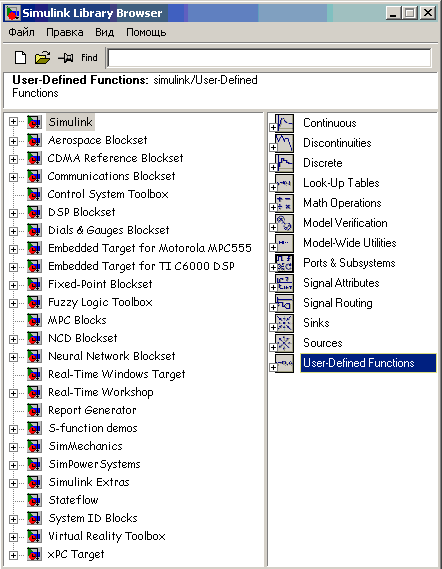
Рисунок 4.1 - Окно Simulink Library Browser
Сборка блок-схемы S-модели заключается в том, что графические изображения выбранных блоков с помощью мыши перетягиваются из окна раздела библиотеки в окно блок-схемы, а затем выходы одних блоков в окне блок-схемы соединяются со входами других блоков (также с помощью мыши). Соединение блоков выполняется следующим образом: указатель мыши подводят к определенному выходу нужного блока (при этом указатель должен приобрести форму крестика), нажимают левую кнопку и, не отпуская ее, перемещают указатель к нужному входу другого блока, а потом отпускают кнопку. Если соединение осуществлено верно, на входе последнего блока появится изображение черной стрелки.
Сборка модели осуществляется в рабочем поле специального окна (рисунок 4.2). Это окно имеет строку меню, панель инструментов и рабочее поле. Меню File (Файл) содержит команды, предназначенные для работы с МDL - файлами; меню Edit (Правка) - команды редактирования блок-схемы; меню View (Вид) команды изменения внешнего вида окна; меню Simulation (Моделирование) - команды управления процессом моделирования; меню Format (Формат) - команды редактирования формата (то есть команды, позволяющие изменить внешний вид отдельных блоков и блок-схемы в целом). Меню Tools (Инструменты) включает некоторые дополнительные сервисные средства, предназначенные для работы с S-моделью.
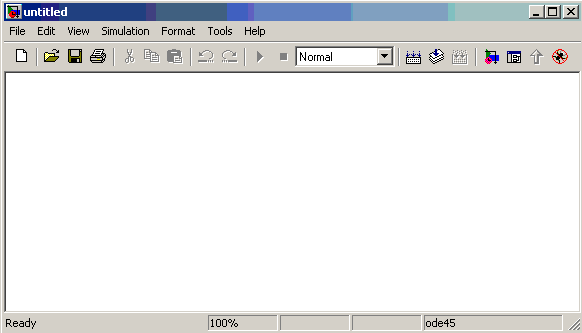
Рисунок 4.2 - Окно, в котором осуществляется сборка модели
Любая блок-схема моделируемой системы должна включать в себя один или несколько блоков-источников, генерирующих сигналы, которые, собственно, и вызывают «движение» моделируемой системы, и один или несколько блоков-приемников, которые позволяют получить информацию о выходных сигналах этой системы (увидеть результаты моделирования).
Запуск модели на выполнение
осуществляется нажатием на кнопку
 ,
либо через меню Simulation→Start,
остановка нажатием на кнопку
,
либо через меню Simulation→Start,
остановка нажатием на кнопку
 ,
либо через меню Simulation→Stop,
пауза - на кнопку
,
либо через меню Simulation→Stop,
пауза - на кнопку
 ,
либо через меню Simulation→Pause,
пауза активна, когда модель запущена
на выполнение. Кнопки расположены на
панели инструментов.
,
либо через меню Simulation→Pause,
пауза активна, когда модель запущена
на выполнение. Кнопки расположены на
панели инструментов.
4.2 Преобразование уравнений асинхронной машины в неподвижной системе координат
Система уравнений (3.13) в операторной форме примет вид:
 (4.1)
(4.1)
Для создания модели, из системы уравнений (4.1) выражаются токи и потокосцепления и система уравнений примет вид:
 (4.2)
(4.2)
4.3 Расчёт параметров модели для АД серии 4А
Для моделирования выбран асинхронный двигатель с короткозамкнутым ротором марки 4А112M4У3 со следующими паспортными данными:
- номинальная выходная мощность Р>2н>=5.5 кВт,
- номинальное фазное напряжение обмотки статора U>1н>=220 В,
- номинальная частота тока f>1>=50 Гц,
- номинальный коэффициент полезного действия η>н>= 85.5 %,
- номинальный коэффициент мощности статорной обмотки сosφ=0.85,
- критическое скольжение ротора S>k>= 25 %,
- номинальное скольжение ротора S>н>= 3.6 %,
- число пар полюсов: р=2,
- число фаз: m=3,
- скорость холостого хода: n>1>=1500 об/мин,
- момент инерции на валу машины: J=0,017 кгм2,
- параметры Г-образной схемы замещения в режиме короткого замыкания (рисунок 4.3) в относительных единицах:
- в номинальном режиме:
R`>1*>=0.064, X`>1*>=0.078, R``>2*>=0.041, X``>2*>=0.13, X>m>>*>=2.8,
- в режиме короткого замыкания:
R``>2*кз>=0.048, X``>2*>=0.062.
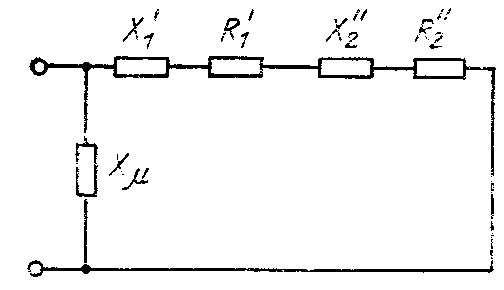
Рисунок 4.3 – Г-образная схема замещения
По известным паспортным данным АД и параметрам Г-образной схемы замещения рассчитываются параметры Т-образной схемы замещения в режиме короткого замыкания (рисунок 4.4) и коэффициенты системы уравнений (4.2) и параметры блоков модели АД.
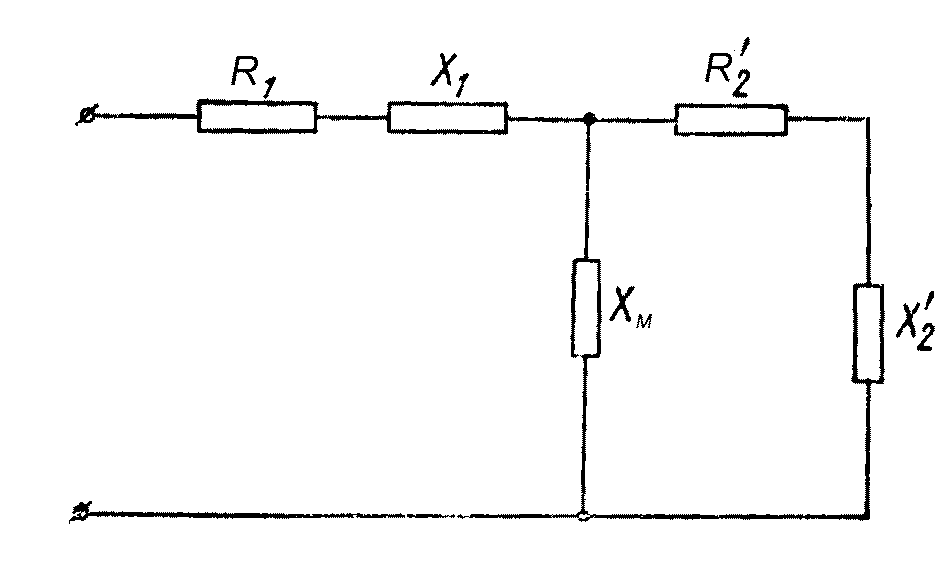
Рисунок 4.4 – Т-образная схема замещения
Номинальный фазный ток статора
 А.(4.3)
А.(4.3)
Базисное значение сопротивления
 Ом.(4.4)
Ом.(4.4)
Угловая частота тока
 с-1.
(4.5)
с-1.
(4.5)
Реактивное сопротивление рассеяния статора в относительных единицах
Х>1*>= .(4.6)
.(4.6)
Коэффициент, связывающий параметры машины в Т и Г-образной схемах замещения
 .(4.7)
.(4.7)
Реактивное сопротивление рассеяния фазы статора
 Ом.(4.8)
Ом.(4.8)
Активное сопротивление фазы статора
 Ом.(4.9)
Ом.(4.9)
Индуктивность рассеяния фазы статора
 Гн.(4.10)
Гн.(4.10)
Реактивное сопротивление рассеяния фазы ротора
 Ом.(4.11)
Ом.(4.11)
Активное сопротивление фазы ротора
 Ом.(4.12)
Ом.(4.12)
Индуктивность рассеяния фазы ротора
 Гн.(4.13)
Гн.(4.13)
Реактивное сопротивление взаимоиндукции
 Ом.(4.14)
Ом.(4.14)
Индуктивность взаимоиндукции
 Гн.(4.15)
Гн.(4.15)
Полная индуктивность фазы статора
 Гн.(4.16)
Гн.(4.16)
Полная индуктивность фазы ротора
 Гн.(4.17)
Гн.(4.17)
Суммарные потери мощности в двигатели
 Вт.(4.18)
Вт.(4.18)
Основные потери в обмотке статора
 Вт.(4.19)
Вт.(4.19)
Намагничивающий ток
 А.(4.20)
А.(4.20)
Потери в стали статора
 Вт,(4.21)
Вт,(4.21)
где
 выбирается из диапазона 0.08-0.2.
выбирается из диапазона 0.08-0.2.
Основные потери в обмотке ротора
 Вт.(4.22)
Вт.(4.22)
Суммарные потери в стали и механические
 Вт.(4.23)
Вт.(4.23)
Механические потери
 Вт.(4.24)
Вт.(4.24)
Скорость идеального холостого хода двигателя
 с-1.(4.25)
с-1.(4.25)
Номинальная скорость вращения двигателя
 с-1.(4.26)
с-1.(4.26)
Коэффициент трения
 Нּмּс.(4.27)
Нּмּс.(4.27)
Коэффициенты системы уравнений обобщённой асинхронной машины:
 Ом,(4.28)
Ом,(4.28)
 Гн,(4.29)
Гн,(4.29)
 с,
(4.30)
с,
(4.30)
 с,
(4.31)
с,
(4.31)
 .(4.32)
.(4.32)
Параметры блоков модели обобщённой асинхронной машины:
 Сим, (4.33)
Сим, (4.33)
 с-1,
(4.34)
с-1,
(4.34)
 Ом, (4.35)
Ом, (4.35)
 ,
(4.36)
,
(4.36)
 (кг•м2)-1.
(4.37)
(кг•м2)-1.
(4.37)
4.4 Структурная схема модели в неподвижной системе координат и её поблочное описание
По системе уравнений (4.2) собирается схема модели обобщённой машины в неподвижной системе координат (рисунок 4.5) с рассчитанными параметрами. На входы модели подаются напряжения, сдвинутые по фазе на 90 электрических градусов:

где
 -
амплитудное значение номинального
фазного напряжения.
-
амплитудное значение номинального
фазного напряжения.
При номинальном питающем напряжении реализуется прямой пуск АД
Рисунок 4.5 - Структурная схема модели обобщённой асинхронной машины в неподвижной системе координат
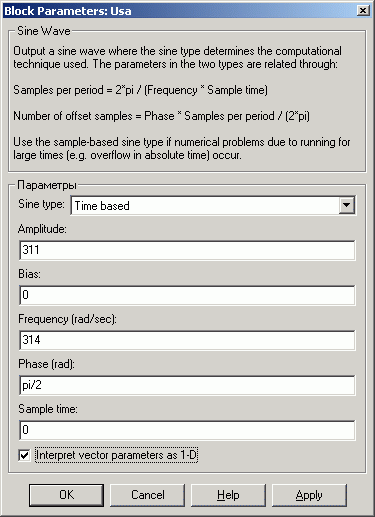
Блоки Usα и Usβ (рисунок 4.6) являются генераторами гармонических сигналов, Usα – косинусоиды, Usβ – синусоиды. Они имитируют работу источников напряжения.
Настраиваемыми параметрами являются:
Sine type – тип синусоидальной волны,
Amplitude
- амплитуда сигнала, для данной схемы
 В,
В,
Bias – смещение (постоянная составляющая синусоиды),
Frequency
– угловая частота колебаний, для данной
схемы равная
 ,
,
Phase – начальная фаза (в радианах), равная:
 - для косинусоиды, 0 – для синусоиды,
- для косинусоиды, 0 – для синусоиды,
Sample time – величина дискрета времени.
а) б)
Рисунок 4.6 - Блок Usα: а) внешний вид, б) окно параметров
Блок
 (рисунок 4.7) осуществляет умножение
входного сигнала на постоянную величину,
значение которой задаётся в настройке
блока.
(рисунок 4.7) осуществляет умножение
входного сигнала на постоянную величину,
значение которой задаётся в настройке
блока.
Аналогичные в схеме блоки:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Настраиваемыми параметрами являются:
Gain –
коэффициент усиления, для данной схемы
=5.756,
Multiplication – тип способа умножения.
а) б)
Рисунок 4.7 - Блок
:
а) внешний вид, б) окно параметров
Блок Sum (рисунок 4.8) суммирует поступающие на него сигналы (в том числе с разными знаками).
Настраиваемыми параметрами являются:
Icon shape – форма изображения (круг или прямоугольник),
List of signs – список входов и их знаки.
а) б)
Рисунок 4.8 - Блок Sum: а) внешний вид, б) окно параметров
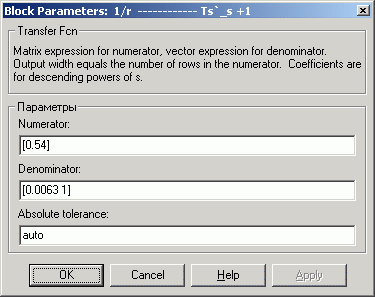
Блок
 (рисунок 4.9) реализует звено введённой
в него передаточной функции. Аналогичный
в схеме блок:
(рисунок 4.9) реализует звено введённой
в него передаточной функции. Аналогичный
в схеме блок:
 .
.
Настраиваемыми параметрами являются:
Numerator
– числитель, для данной схемы
 ,
,
Denominator
– делитель, для данной схемы
 .
.
а) б)
Рисунок 4.9 - Блок
:
а) внешний вид, б) окно параметров
Блок Klych (рисунок 4.10) служит для переключения типа момента нагрузки на валу, либо М2 либо α•М2. Переключение происходит при двойном нажатии правой кнопкой мыши на блоке.
Настраиваемых параметров не имеет.
Рисунок 4.10 - Блок Klych
Блок Product (рисунок 4.11) выполняет умножение (деление) входных сигналов.
Настраиваемыми параметрами являются:
Number of inputs – количество входов,
Multiplication – тип способа умножения.
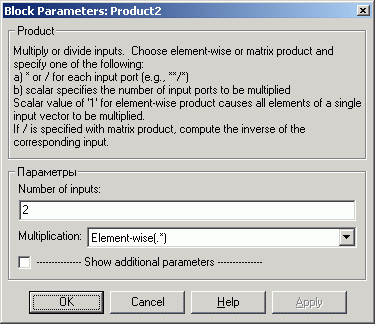
а) б)
Рисунок 4.11 - Блок Product: а) внешний вид, б) окно параметров
Блок М2 (рисунок 4.12) формирует постоянную величину нагрузки на валу, которая является неизменной во времени.
Настраиваемыми параметрами являются:
Constant value – постоянная величина.
а) б)
Рисунок 4.12 - Блок М2: а) внешний вид, б) окно параметров
Блок α•М2 (рисунок 4.13) является задатчиком нагрузки и устанавливает на валу линейно изменяющийся во времени момент нагрузки.
Настраиваемыми параметрами являются:
Slope – изменение величины за 1 секунду. В зависимости от знака возрастает или убывает,
Start time – момент времени в который начинает изменятся нагрузка,
Initial output – начальное значение, с которого начнётся изменение нагрузки.
а) б)
Рисунок 4.13 - Блок α•М2: а) внешний вид, б) параметры
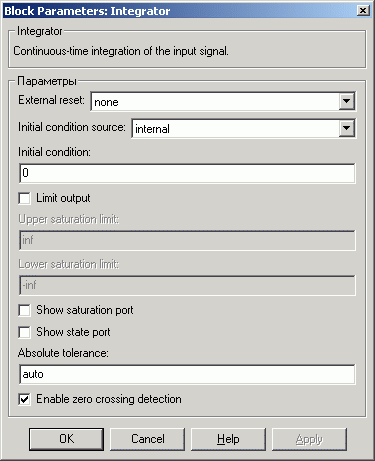
Блок Integrator (рисунок 4.14) представляет идеальное интегрирующее звено. Он позволяет осуществить интегрирование поступающего на него сигнала в непрерывном времени.
Настраиваемыми параметрами являются:
External reset – подключение дополнительного управляющего сигнала,
Initial condition source – определение источника (внутренний или внешний),
Initial condition – начальное значение выходной величины,
Limit output – ограничение величины выхода,
Upper saturation limit – верхнее предельное значение выходной величины,
Lower saturation limit – нижнее предельное значение выходной величины,
Show saturation port – показать порт насыщения,
Show state port – показать порт состояния,
Absolute tolerance – допустимая предельная величина абсолютной погрешности.
а) б)
Рисунок 4.14 - Блок α•М2: а) внешний вид, б) параметры
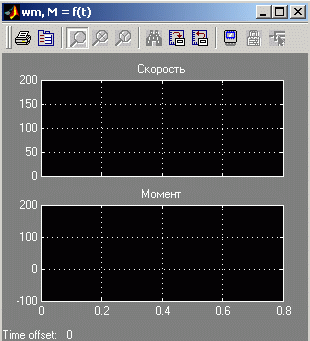
Графический дисплей «wm,
M=f(t)»
(рисунок 4.15)
позволяет в ходе моделирования наблюдать
графики переходных процессов скорости
и момента во времени. По горизонтальной
оси откладывается значение модельного
времени, а по вертикали значение входной
величины, отвечающее этому моменту
времени. Окно параметров вызывается
нажатием на иконку
 .
.
Настраиваемыми параметрами являются:
Number of axes – количество осей,
Time range – интервал времени,
Tick labels – метки осей,
Sampling – используется только для дискретных во времени процессов. Его значение (1), установленное по умолчанию, для непрерывных процессов изменять не рекомендуется. Позволяет задать периодичность (через сколько дискретов времени) отображения значений времени.
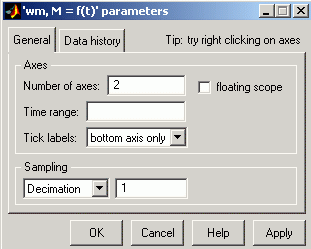
а) б) в)
Рисунок 4.15 - Блок «wm, M=f(t)»: а) внешний вид, б) внутренний вид, в) окно параметров
Шинный формирователь Mux (рисунок 4.16) выполняет объединение входных величин в единый выходной вектор (шину), что очень удобно, так как схема получается мене загромождённой.
Настраиваемыми параметрами являются:
Number of inputs – число входов,
Display option – вид отображения блока.

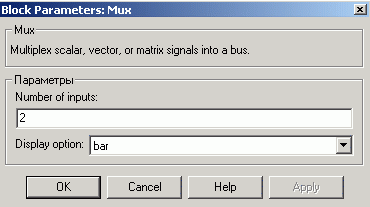
а) б)
Рисунок 4.16 - Блок Mux: а) внешний вид, б) окно параметров
Цифровой дисплей «wm, M» (рисунок 4.17) выводит на экран числовые значения входящих в блок величин (скорости и момента).
Настраиваемыми параметрами являются:
Format – формат вывода чисел,
Decimation – позволяет задать периодичность (через сколько дискретов времени) отображения значений времени,
Sample time – используется только для дискретных во времени процессов. Его значение (-1), установленное по умолчанию, для непрерывных процессов изменять не рекомендуется.
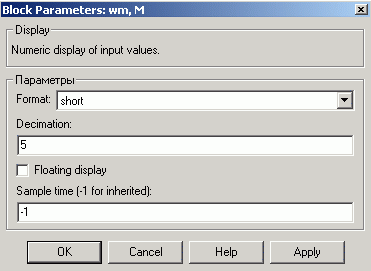
а) б)
Рисунок 4.17 - Блок «wm, M»: а) внешний вид, б) окно параметров
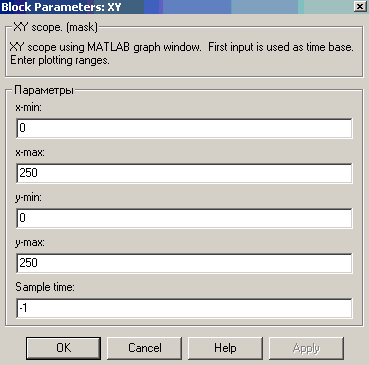
Осциллограф XY (рисунок 4.18) – графическое окно, отображающее зависимость одной переменной от другой. В данной схеме отображает механическую характеристику. Большим минусом этого блока является то, что в графическом окне нет сетки и нет возможности нанести надписи.
Настраиваемыми параметрами являются:
x-min, x-max, y-min, y-max – пределы осей по Х и У,
Sample time – смотри выше.
а) б) в)
Рисунок 4.18 - Блок XY: а) внешний вид, б) окно параметров, в) графическая область
Блок «Построение механической характеристики» (рисунок 4.19) является ссылкой на специально разработанную M-программу, в которой реализуется графическое построение механической характеристики. Большим удобством является то, что имеется сетка и можно наносить надписи осей и в графической области, а также редактирование полученных результатов.
а) б)
Рисунок 4.19 - Графическое окно для построения характеристик: а) внешний вид, б) графическая область
4.5 Результаты моделирования
После запуска схемы модели на моделирование и завершения процедуры моделирования можно проанализировать полученные результаты.
Графический дисплей «wm, M=f(t)» отображает переходной процесс скорости и момента во времени.
При прямом пуске вначале наблюдаются значительные колебания момента и скорости. При приложении момента нагрузки, аналогично наблюдаются колебания момента и скорости, но менее значительные, чем при пуске, также видно, что при приложении момента нагрузки наблюдается уменьшение скорости.
Получив механическую характеристику, можно увидеть, что при пуске она получается динамической и на ней чётко виден колебательный процесс скорости и момента в виде концентрических окружностей с уменьшающимся радиусом по мере затухания колебаний скорости и момента. Аналогичная картина наблюдается при ступенчатом набросе нагрузки.
5. РАЗРАБОТКА ВИРТУАЛЬНОЙ ЛАБОРАТОРНОЙ РАБОТЫ НА БАЗЕ ВИРТУАЛЬНОЙ АСИНХРОННОЙ МАШИНЫ
Иную возможность анализа АД представляет специализированный раздел по электротехнике Toolbox Power System Block. В его библиотеке имеются блоки виртуальных электрических машин и АД с короткозамкнутым и фазным ротором в том числе.
Схема виртуальной лабораторной работы для исследования двигателя с короткозамкнутым ротором представлена на рисунке 5.1.
Рисунок 5.1 - Схема модели лабораторной работы для исследования асинхронного двигателя с короткозамкнутым ротором
5.1 Поблочное описание схемы
Основными блоками схемы являются: источник трёхфазного напряжения (Source), трёхфазный измеритель напряжения и тока (Three-Phase V-I Measurement), трёхфазный асинхронный двигатель с короткозамкнутым ротором (AD), задатчик нагрузки (М2 и α•М2), измеритель (вывод) скорости и электромагнитного момента на валу (wm, Te).
Дополнительные блоки: переключатели (Klych и K_Z), управляемый ключ (Switch), машинное время (Clock), осциллограф (XY), шинный формирователь (Mux), цифровые и графические дисплеи («wm, M, I1»; «P2, P1, I1, S, KPD, Cos.f»), «Рабочие характеристики», блок «U1. I1. P1».
Блоки программ: «Ввод данных», «Построение механической характеристики» и «Построение рабочих характеристик».
Источник трёхфазного напряжения Source (рисунок 5.2) имитирует работу трёхфазного источника синусоидального напряжения с заземлённой нейтралью N и выходами фаз А, В и С.
Настраиваемыми параметрами являются:
Phase to ground peak voltage (V) – амплитуда фазного напряжения,
Phase angle of phase A (Degrees) – начальный фазовый угол фазы А,
Frequency (Hz) – частота напряжения,
Source resistance (Ohms), inductance (H) – сопротивление и индуктивность источника.

а) б)
Рисунок 5.2 - Блок Source: а) внешний вид, б) окно параметров
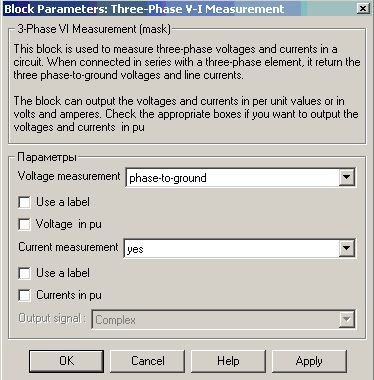
Трёхфазный измеритель напряжения и тока Three-Phase V-I Measurement (рисунок 5.3) измеряет трёх фазное мгновенное напряжение и ток, потребляемые нагрузкой от источника.
Настраиваемыми параметрами являются:
Voltage measurement: phase-to-ground – измерение фазного напряжения от фазы до земли,
Use a label – использовать ярлык (ссылку) вместо выхода,
In pu – система относительных единиц,
Current measurement: yes – подтверждение измерения тока.
а) б)
Рисунок 5.3 - Блок Three-Phase V-I Measurement: а) внешний вид, б) параметры
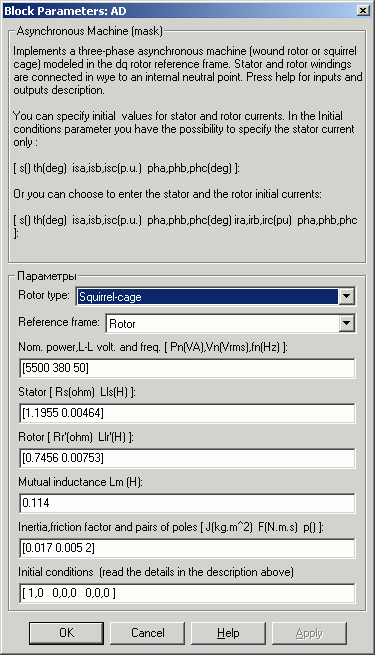
Трёхфазный асинхронный двигатель с короткозамкнутым ротором AD (рисунок 5.4) имитирует работу асинхронного двигателя с короткозамкнутым (или фазным) ротором. Составлен на основе математических уравнений.
Настраиваемыми параметрами являются:
Nom. power Pn – номинальная мощность,
Volt Vn – номинальное линейное напряжение,
Frequency fn – номинальная частота,
Stator (Rotor) R, L – активное сопротивление и индуктивность статора и приведённого ротора,
Mutual inductance Lm – взаимная индуктивность,
Inertia J – момент инерции на валу,
Friction factor F – коэффициент трения,
Pairs of poles – число пар полюсов р,
Initial conditions – начальные данные:
скольжение, угол поворота ротора, ток трёх фаз статора, сдвиг фаз А, В, С.
а) б)
Рисунок 5.4 - Блок AD: а) внешний вид, б) параметры
Задатчик нагрузки М2 (рисунок 4.12) и задатчик нагрузки α•М2 (рисунок 4.13). Описание этих блоков рассмотрено в разделе 4.
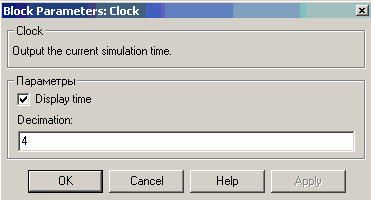
Машинное время Clock (рисунок 5.5) отображает время моделирования.
Настраиваемыми параметрами являются:
Display time – отображения времени в блоке,
Decimation – позволяет задать периодичность (через сколько дискретов времени) отображения значений времени.
а) б)
Рисунок 5.5 - Блок Clock: а) внешний вид, б) параметры
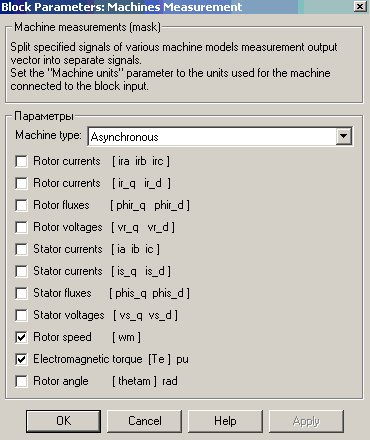
Измеритель (вывод) «wm, Te» (рисунок 5.6) выводит для отображения различные параметры асинхронной машины. Имеет возможность выбрать необходимые для вывода параметры из имеющихся. В данной схеме выводятся значения угловой скорости и электромагнитного момента на валу.
Настраиваемыми параметрами являются:
Machine type – тип машины,
Rotor currents [ira irb irc] – трёхфазный ток ротора,
Rotor currents [ir_q ir_d] – ток ротора в осях q, d,
Rotor fluxes [phir_q phir_d] – поток в роторе в осях q, d,
Rotor voltages [vr_q vr_d]- напряжение в роторе в осях q, d,
Stator currents [ia ib ic] – трёхфазный ток статора,
Stator currents [is_q is_d] - ток статора в осях q, d,
Stator fluxes [phis_q phis_d] – поток в статоре в осях q, d,
Stator voltages [vs_q vs_d] – напряжение в статоре в осях q, d,
Rotor speed [wm] – скорость вращения ротора
Electromagnetic torque [Te] – электромагнитный момент,
Rotor angle [thetam] – угол поворота ротора.
а) б)
Рисунок 5.6 - Блок «wm, Te»: а) внешний вид, б) параметры
Переключатели Klych, K_Z и Dinamika (рисунок 5.7) служат для переключения входного сигнала. Klych для переключения типа момента нагрузки на валу, K_Z для переключения на схему снятия пускового момента, а Dinamika для снятия динамической механической характеристики. Переключение происходит при двойном нажатии правой кнопкой мыши на блоке.
Настраиваемых параметров не имеет.
Рисунок 5.7 - Блоки Klych, K_Z и Dinamika
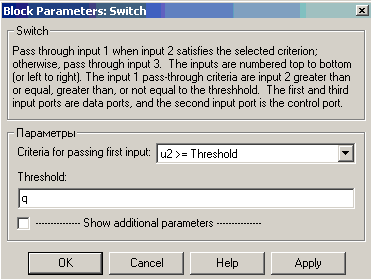
Управляемый ключ Switch (рисунок 5.8) служит для управляемого переключения входного сигнала. Имеет три входа, 1 и 3 - информационные, 2 - управляющий. Если величина управляющего сигнала не меньше некоторого ограничения, заданного в поле Threshold, то на выход подаётся сигнал с первого входа, в противном случае – сигнал с третьего входа. В схеме на первый вход подаётся вектор значений скорости и момента, также и на третий вход подаётся вектор скорости и момента при условии, что ключ Dinamika в верхнем положении, а на второй вход время.
Настраиваемыми параметрами являются:
Criteria for passing first input – критерий для прохождения сигнала с первого входа,
Threshold – порог переключения входа.
а) б)
Рисунок 5.8 - Блок Switch: а) внешний вид, б) параметры
Осциллограф XY (рисунок 4.18). Описание этого блока рассмотрено в разделе 4.
Шинный формирователь Mux (рисунок 4.16). Описание этого блока рассмотрено в разделе 4.
Графический дисплей «wm, M, I1=f(t)» (рисунок 4.15). Описание этого блока рассмотрено в разделе 4.
Цифровые дисплеи «wm, M», «P2, P1, I1, S, KPD, Cos.f» (рисунок 4.17). Описание этих блоков рассмотрено в разделе 4.
Блок «Рабочие характеристики» (рисунок 5.9) – это не стандартный блок, он разработан при создании данной виртуальной лабораторной работы. Внутри него реализуется расчёт рабочих характеристик по следующим формулам:
 ,
,
 ,
,
 ,
,
 ,
,
к входной мощности добавляются потери в стали р>с>>m>>1>, так как в модели они не учитываются.
Настраиваемых параметров не имеет.
Рисунок 5.9 - Блок «Рабочие характеристики»
Блок «U1. I1. P1» (рисунок 5.10) также является не стандартным. В нём реализуется преобразование входных трёхфазных напряжений и токов в действующие значения, а также вычисление активной мощности.
Настраиваемых параметров не имеет.
Рисунок 5.10 - Блок «U1. I1. P1»
Блоки программ: «Ввод данных», «Построение механической характеристики» и «Построение рабочих характеристик» (рисунок 5.11) – являются ссылками на специально написанные M-программы, в которых реализуется ввод данных с помощью меню (рисунок 5.12) и графическое построение (рисунок 5.13) механической и рабочих характеристик.
Рисунок 5.11 - Блоки программ
При открытии блока «Ввод данных», в котором реализована подпрограмма “Menu”, на экран выводится меню, в котором можно изменить параметры моделирования. Это является очень удобным элементом, так как ненужно перенастраивать саму модель и её блоки.
В меню ввода данных для модели:
время переходного процесса – это время необходимое для разгона двигателя до холостого хода при исчезновении колебаний момента и скорости,
время моделирования – время необходимое для выполнения одной процедуры моделирования,
амплитуда фазного напряжения –
это номинальное значение U>1н>
умноженное на
 ,
,
частота – частота питающего напряжения.
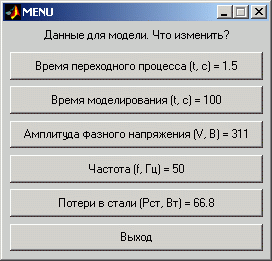
Рисунок 5.12 - Меню ввода данных
Рисунок 5.13 - Графическое окно для построения характеристик
5.2 Результаты моделирования
Графический дисплей «wm, M=f(t)» отображает переходной процесс скорости и момента во времени, представленный на рисунке 5.14.
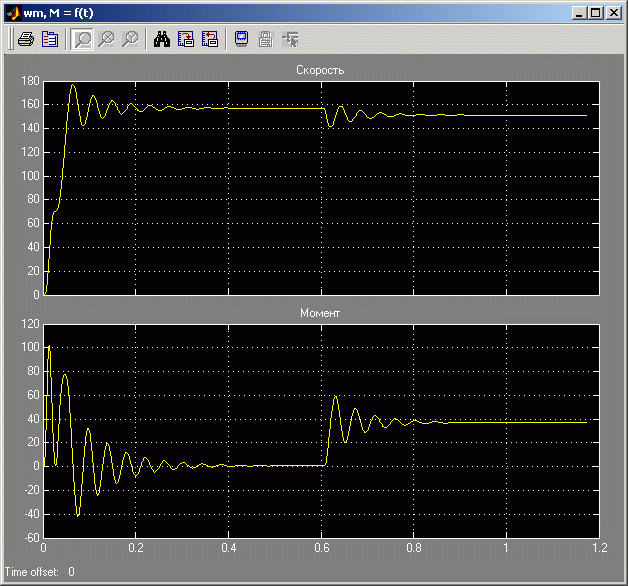
Рисунок 5.14 - Переходной процесс скорости и момента функции времени при пуске на холостом ходу и набросе нагрузки
Из рисунке 5.14 видно, что при прямом пуске вначале наблюдаются значительные колебания момента и скорости. При приложении момента нагрузки, аналогично наблюдаются колебания момента и скорости, но менее значительные, чем при пуске, также видно, что при приложении момента нагрузки наблюдается уменьшение скорости.
Получив механическую характеристику, можно увидеть, что при пуске она получается динамической и на ней также как и на рисунке 5.14 чётко виден колебательный процесс скорости и момента в виде концентрических окружностей с уменьшающимся радиусом по мере затухания колебаний скорости и момента. Аналогичная картина наблюдается при мгновенном набросе нагрузки. Данные характеристики представлены на рисунках 5.15 и 5.16.
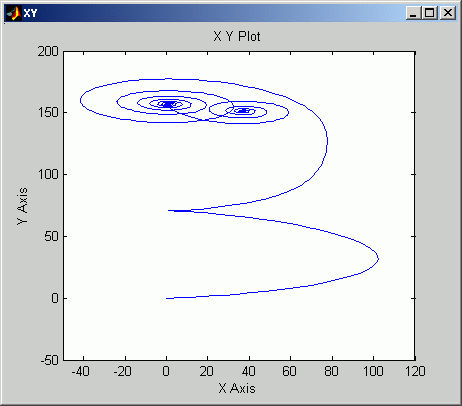
Рисунок 5.15 - Динамическая механическая характеристика при пуске на холостом ходу и набросе нагрузки, построенная блоком «XY»
Рисунок 5.16 - Динамическая механическая характеристика при пуске на холостом ходу (синяя) и набросе нагрузки (красная), построенная блоком «Построение механической характеристики»
При нагружении двигателя с малой скоростью увеличения нагрузки получается характеристика, близкая к статической естественной механической характеристике.
5.3 Сравнение моделей АД в неподвижной системе координат и модели на базе виртуальной асинхронной машины
По результатам моделирования полученных в разделах 4 и 5 видно, что переходные процессы скорости и момента при пуске и ступенчатом набросе нагрузке, динамические механические характеристики, а также естественные механические характеристики абсолютно идентичные. Это доказывает, что блок виртуальной асинхронной машины AD в своей структуре имеет математические уравнения обобщённой асинхронной машины.
6. РАЗРАБОТКА МЕТОДИКИ ВЫПОЛНЕНИЯ ЛАБОРАТОРНОЙ РАБОТЫ
6.1 Программа работы
6.1.1 Ознакомление с программой MatLab
6.1.2 Объект исследования
6.1.3 Исследование АД с короткозамкнутым ротором
6.1.3.1 Ознакомление со схемой лабораторной работы
6.1.3.2 Ввод данных в модель
6.1.3.3 Определение пускового момента и тока при коротком замыкании
6.1.3.4 Снятие динамической характеристики при параметрах короткого замыкания
6.1.3.5 Снятие естественной механической характеристики
6.1.3.6 Построение естественных рабочих характеристик
6.1.3.7 Снятие искусственных механических характеристик при
- разных значениях U>1>
- разных значениях f>1>
- разных значениях f>1>
и

6.1.4 Исследование АД с фазным ротором
6.1.4.1 Ознакомление со схемой лабораторной работы
6.1.4.2 Ввод данных в модель
6.1.4.3 Пуск при заданном пусковом сопротивлении
6.1.4.4 Снятие естественной механической характеристики
6.1.4.5 Построение естественных рабочих характеристик
6.1.4.6 Снятие искусственных механических характеристик при
- разных значениях R>2доб>
- разных значениях U>1>
- разных значениях R>2доб> и U>1>
6.2 Ознакомление с программой MatLab и пакетом Simulink
После вызова программы MATLAB 6.5 на экране появляется окно MATLAB. В нём могут отображаться несколько окон, главными являются Окно команд, Текущий каталог и Рабочая область. По необходимости через меню Вид, которое располагается на передней панели, можно настроить окна по собственному желанию.
В командном окне появляются символы команд, которые набираются пользователем с клавиатуры, отображаются результаты выполнения этих команд, текст исполняемой программы и информация об ошибках выполнения программы, распознанных системой.
В окне текущего каталога отображается содержимое выбранной для работы папки: различные модели, м-программы, файлы данных, фигуры.
В окне рабочей области отображаются временные данные текущего сеанса работы: параметры, вводимые в схему, результаты вычислений и измерений, время модели, выходные данные.
Признаком того, что программа MATLAB готова к восприятию и выполнению очередной команды, является наличие в последней строке командного окна знака приглашения (»), справа от которого расположен мигающий курсор.
В верхней части окна (под заголовком) находится строка меню. Для того чтобы открыть какое-либо меню, следует установить на нём указатель мыши и нажать её левую кнопку. Наиболее необходимые для работы команды, такие как: открыть имеющийся или создать новый файл, сохранить или распечатать и т.д. расположены в меню Файл и представлены на рисунке 6.1.
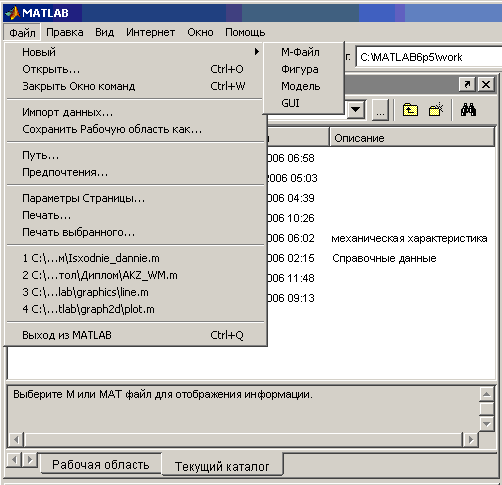
Рисунок 6.1 - Команды меню Файл
Для удобства работы, на переднюю панель вынесены кнопки первой необходимости:
 - с помощью кнопки (…) выбирается
текущий для работы каталог, рядом
отображается путь к нему.
- с помощью кнопки (…) выбирается
текущий для работы каталог, рядом
отображается путь к нему.
 - кнопка с изображением чистого
листа служит для создания нового файла
программы, а кнопка с изображением папки
для открытия уже имеющегося файла.
- кнопка с изображением чистого
листа служит для создания нового файла
программы, а кнопка с изображением папки
для открытия уже имеющегося файла.
 - кнопка с изображением блоков
служит для запуска программного пакета
Simulink,
при её нажатии появляется окно библиотеки
Simulink
представленное на рисунке 4.1. Из этого
окна можно создать новый файл модели
(рисунок 4.2) и из имеющихся в библиотеке
блоков собрать необходимую модель.
- кнопка с изображением блоков
служит для запуска программного пакета
Simulink,
при её нажатии появляется окно библиотеки
Simulink
представленное на рисунке 4.1. Из этого
окна можно создать новый файл модели
(рисунок 4.2) и из имеющихся в библиотеке
блоков собрать необходимую модель.
Описание пакета Simulink рассмотрено в разделе 4.
6.3 Объект исследования
В лабораторной работе исследуются асинхронные двигатели серии 4А с исполнением по степени защиты IP 44 для АД с короткозамкнутым ротором и с исполнением IP 23 для АД с фазным ротором. Паспортные данные, этих двигателей приведены в таблицах П1-П2 и П4-П5:
- номинальная выходная мощность Р>2н>,
- номинальный коэффициент полезного действия η>н>,
- номинальный коэффициент мощности статорной обмотки сosφ>н>,
- момент инерции на валу машины J кгм2,
- номинальный электромагнитный момент М>н>,
- кратность пускового момента М>п >/ М>н>,
- кратность максимального момента М>к >/ М>н>,
- кратность пускового тока I>1п >/ I>1н>,
- критическое скольжение ротора S>k>= 25 %,
- номинальное скольжение ротора S>н>= 3.6 %.
- параметры Г-образной схемы замещения (рисунок 4.3) в относительных единицах:
в номинальном режиме:
- активное и реактивное сопротивления R`>1*>, X`>1*>,
- активное и реактивное сопротивления R``>2*>, X``>2*>,
- реактивное сопротивление взаимоиндукции X>m>>*>,
в режиме короткого замыкания:
- активное и реактивное сопротивления R``>2*кз>, X``>2*>.
В таблицах П3 и П6 приведены значения величин, необходимых для моделирования и рассчитаны по данным таблиц П1-П2 и П4-П5:
- добавочное сопротивление R>2 доб>,
- потери в стали P>st>,
- коэффициент трения F>tr>,
в номинальном режиме:
- активное сопротивление и индуктивность рассеяния фазы статора R>s>, L>s>,
- активное сопротивление и индуктивность рассеяния фазы ротора R`>r>, L`>r>,
- индуктивность взаимоиндукции L>m>,
в режиме короткого замыкания:
- активное сопротивление и индуктивность рассеяния фазы ротора R`>r>> кз>, L`>r>> кз>,
6.4 Исследование АД с короткозамкнутым ротором
Описание принципа действия, устройства, способов пуска и регулирования скорости приведено в разделе 2.
6.4.1 Ознакомление со схемой лабораторной работы
Для выбора схемы необходимо в окне MATLAB (рисунок 6.1) выбрать в качестве текущего каталога папку, в которой находится файл со схемой асинхронного двигателя с короткозамкнутым ротором: «C:\MATLAB6p5\work\AD\AKZ\AKZ.mdl». На экране появится схема модели лабораторной работы для исследования асинхронного двигателя с короткозамкнутым ротором, представленная на рисунке 6.2.
Основными блоками схемы являются: источник трёхфазного напряжения (Source), трёхфазный измеритель напряжения и тока (Three-Phase V-I Measurement), трёхфазный асинхронный двигатель с короткозамкнутым ротором (AD), задатчик нагрузки (М2 или α•М2), измеритель (вывод) скорости и электромагнитного момента на валу (wm, Te).
Дополнительные блоки: переключатели (Klych и K_Z), управляемый ключ (Switch), машинное время (Clock), осциллограф (XY), шинный формирователь (Mux), цифровые и графические дисплеи («n, M»; «P2, P1, I1, S, KPD, Cos.f»; «n, M, I1»), рабочие характеристики, блок «U1. I1. P1», усилитель «-К-».
Блоки программ: «Ввод данных», «Построение механической характеристики» и «Построение рабочих характеристик».
Рисунок 6.2 - Схема модели лабораторной работы для исследования асинхронного двигателя с короткозамкнутым ротором
6.4.2 Ввод данных в модель
Данные исследуемого двигателя для своего варианта (таблицы П1 и П3) необходимо ввести в модель, для этого необходимо дважды щёлкнуть левой кнопкой мыши по блоку асинхронной машины AD и в открывшемся окне ввести данные двигателя (рисунок 5.4). В качестве примера использован двигатель 4А112М4У3.
6.4.3 Определение пускового момента и тока при коротком замыкании
Опыт короткого замыкания асинхронного двигателя с короткозамкнутым ротором соответствует питанию обмотки статора при заторможенном роторе. Опыт проводится с целью определения пускового момента и пускового тока [4].
Для проведения опыта необходимо открыть блок AD и изменить параметры Rotor [Rr'(ohm) Llr'(H)] на соответствующие параметры ротора при коротком замыкании R`>2 кз >и L`>r>> кз> для заданного варианта, а также переключить блок K_Z (рисунок 5.7) в нижнее положение щёлкнув на нём дважды левой кнопкой мыши. Это приведёт к переключению на схему, когда электромагнитный момент подаётся на вход М2. В этом случае ω=0 и получается режим короткого замыкания.
Запустить систему на моделирование
нажатием на кнопку
и в установившемся режиме (когда показания
блоков перестанут изменяться) остановить
моделирование нажатием на кнопку
,
записать пусковой момент М>п>
и пусковой ток I>1п>
с цифровых дисплеев «P2, P1,
I1, S, KPD, Cos.f» и «n,
M».
Определить кратность пускового тока
 и пускового момента
и пускового момента
 .
Сравнить полученные значения с
паспортными.
.
Сравнить полученные значения с
паспортными.
6.4.4 Снятие динамической характеристики при параметрах короткого замыкания
Опыт проводится с параметрами двигателя из пункта 6.4.3. Блок K_Z переключить в верхнее положение, это приведёт к переключению схемы в режим снятия характеристик, а также переключить блок Klych и Dinamika (рисунок 5.7) в верхнее положение и открыв блок М2 (рисунок 4.12), установить в нём значение равное 0.
Запустить систему на моделирование, двигатель начнёт разгоняться, и скорость дойдёт до холостого хода, в установившемся режиме остановить модель. Открыть блок «Построение механической характеристики» при этом вызовется подпрограмма построения характеристики в графическом окне Figure и построит динамическую механическую характеристику пуска двигателя (рисунок 6.3). Если необходимо, вызвать редактор свойств осей через меню Edit→Axes properties (рисунок 6.4) и изменить пределы осей X и Y до удобных. Через меню File→Export сохранить характеристику как рисунок, предварительно создав для этого на диске собственную папку. Окно с характеристикой закрыть. В блоке «n, M, I1=f(t)» просмотреть переходные процессы скорости, момента и тока статора во времени (рисунок 6.5). Нажатие сочетания клавиш «Alt + Print Screen» на клавиатуре приведёт к копированию активного окна в буфер, т.е. окна с переходными процессами, откуда их можно вставить в графическую программу Paint или в Word. Сохранить рисунок с переходными процессами в ранее созданной папке для создания отчёта.
Рисунок 6.3 - Динамическая механическая характеристика двигателя при пуске без нагрузки с параметрами короткого замыкания
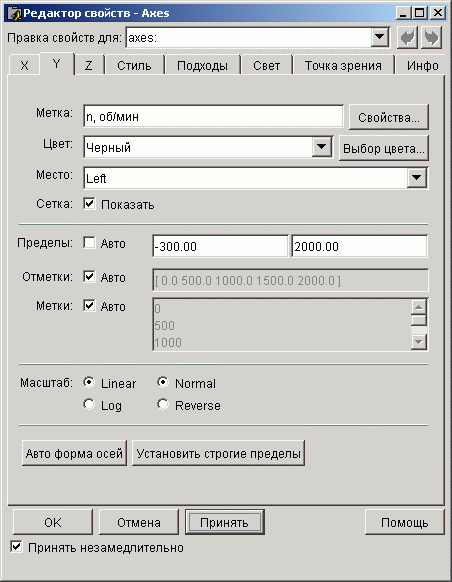
Рисунок 6.4 - Редактор свойств осей
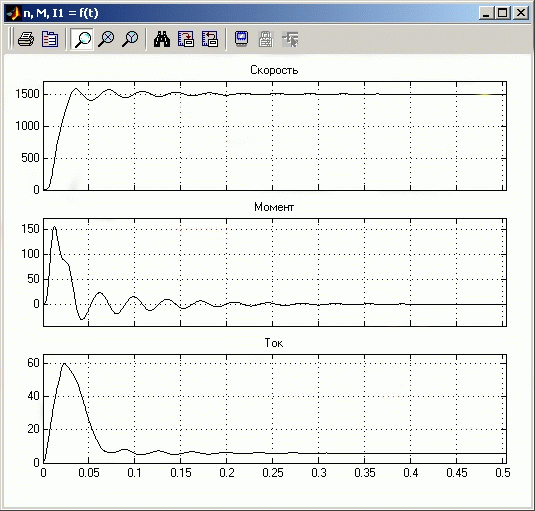
Рисунок 6.5 - Переходные процессы скорости, момента и тока статора во времени при пуске двигателя без нагрузки с параметрами короткого замыкания
6.4.5 Снятие естественной механической характеристики
Механической характеристикой называют зависимость частоты вращения ротора от вращающего электромагнитного момента.
Механическая характеристика называется естественной, если она соответствует номинальному напряжению, номинальной частоте и отсутствию внешних сопротивлений в цепях обмоток [6].
По методике пункта 6.4.2 ввести в блок AD параметры номинального режима. Блок Klych и Dinamika переключить в нижнее положение. В блоке α•М2 задать скорость нарастания нагрузки Slope равной 0,15•М>н>. Это значение обуславливается тем, что при большой скорости нарастания нагрузки механическая характеристика становится динамической и появляется отклонение от естественной характеристики, что наглядно видно из рисунка 6.6, а при очень маленькой скорости нарастания нагрузки процесс вычисления занимает много времени.
Рисунок 6.6 – Механические характеристики при различных значениях α
Запустить систему на моделирование, двигатель начнёт разгоняться и скорость дойдёт до холостого хода, по завершении переходного процесса блок α•М2 начнёт нагружать двигатель и в блоке XY (рисунок 4.18) будет отображаться статическая механическая характеристика. При нагрузке больше критической двигатель остановится и прейдёт в режим противовключения. При отрицательной частоте вращения приблизительно равной 0.3ּn>1> об/мин остановить модель. Открыв блок «Построение механической характеристики» вызовется подпрограмма построения механической характеристики в графическом окне Figure, окно с характеристикой не закрывать.
Повторить опыт, предварительно изменив в блоке α•М2 скорость нарастания нагрузки в поле Slope на отрицательное значение. При отрицательной нагрузке двигатель прейдёт в генераторный режим с отдачей электроэнергии в сеть. При частоте вращения приблизительно равной 2ּn>1> об/мин остановить модель. Повторно открыть блок «Построение механической характеристики», при этом снятая новая характеристика построится вместе с уже имеющейся (рисунок 6.7).
Рисунок 6.7 - Механическая характеристика АД во всех режимах работы
Вызвать редактор свойств осей и изменить пределы осей X и Y до удобных. Сохранить характеристику на диске как рисунок и закрыть окно.
6.4.6 Построение естественных рабочих характеристик
При изменении нагрузки двигателя изменяются токи в обмотках, мощности, частота вращения и другие эксплуатационные показатели. Под рабочими характеристиками поминают зависимость подводимой мощности, тока, скольжения, КПД и коэффициента мощности от отдаваемой мощности на валу при неизменных значениях напряжения, частоты тока питающей сети и внешних сопротивлений в цепях обмоток [6].
Рабочие характеристики снимают при увеличении нагрузки от холостого хода до 1.3 номинальной. Опыт производится аналогично пункту 6.4.5 при параметрах номинального режима. Скорость нарастания нагрузки в блоке α•М2 должна быть 0.15•М>н>.
Запустить систему на моделирование, при нагрузке более 1.3 от номинальной (показания контролировать на цифровом дисплее «n, M») остановить модель. Открыв блок «Построение рабочих характеристик» получить снятые характеристики (рисунок 6.8) и сохранить их на диске как рисунок.
Рисунок 6.8 - Рабочие характеристики
Повторить опыт, сняв одну точку при нагрузке М>2>=0.5ּМ>н>. Для этого необходимо переключить блок Klych в верхнее положение и в блоке М2 установить значение равное 0.
Запустить систему на моделирование, после разгона двигателя до холостого хода открыть блок М2 и установить в нём заданную нагрузку. В установившемся режиме снять показания: n, M2, P1, I1 и по этим данным рассчитать рабочие характеристики при заданной нагрузке по формулам:
 ,
,
,
,
,
к входной мощности добавляется мощность потерь в стали р>с>>m>>1>, так как в модели она не учитывается.
6.4.7 Снятие искусственных механических характеристик
Характеристики, не соответствующие номинальным значениям напряжения и частоты тока питающей сети, а также при наличии сопротивлений в цепях обмоток называют искусственными [6].
Во всех опытах ключ Dinamika в нижнем положении.
Снять естественную и искусственные характеристики при трёх значениях U>1> и построить их в одних осях. Естественная характеристика снимается при U>1>= U>1н>. Для снятия искусственных характеристик необходимо задать напряжение U>1>< U>1н>, открыв блок «Ввод данных», при этом на экране появится меню (рисунок 5.12). Нажав кнопку «Амплитуда фазного напряжения (V, B)» в окне команд MATLAB появится приглашение ввести новое значение напряжения, следует ввести его и нажать «Enter» (рисунок 6.10), по завершении ввода данных нажать «Выход».

Рисунок 6.9 - Приглашение ввести новое значение напряжения в окне команд MATLAB
Опыт проводить по методике пункта 6.4.5 при значениях напряжения 0.5U>1н>, 0.75U>1н >и U>1н>, снятие характеристики в генераторном режиме не производить. Результаты представлены на рисунке 6.9.
Снять естественную и искусственные характеристики при трёх значениях f>1 >и построить их в одних осях. Для снятия характеристик необходимо задать через меню ввода данных частоту равную 0.7f>1н>, f>1н> и 1.3f>1н>. Методика снятия характеристик аналогична пункту 6.4.7.1. Результаты представлены на рисунке 6.10.
Рисунок 6.10 - Механические характеристики при трёх значениях f>1>
Снять естественную и искусственные
характеристики при трёх значениях f>1>
и
 ,
построить их в одних осях. Для снятия
характеристик необходимо задать через
меню ввода данных значения частот тока
0.5f>1н>
при напряжении 0.5U>1н,>
0.75f>1н>
при напряжении 0.75U>1н>
и f>1н>
при напряжении U>1н>
так, чтобы сохранялось условие
.
Методика снятия характеристик аналогична
пункту 6.4.7.1. Результаты представлены
на рисунке 6.11.
,
построить их в одних осях. Для снятия
характеристик необходимо задать через
меню ввода данных значения частот тока
0.5f>1н>
при напряжении 0.5U>1н,>
0.75f>1н>
при напряжении 0.75U>1н>
и f>1н>
при напряжении U>1н>
так, чтобы сохранялось условие
.
Методика снятия характеристик аналогична
пункту 6.4.7.1. Результаты представлены
на рисунке 6.11.
Рисунок 6.11 - Механические
характеристики при трёх значениях
частоты f>1>
и
6.5 Изучение двигателя с фазным ротором
Описание принципа действия, устройства, способов пуска и регулирования скорости приведено в разделе 2.
6.5.1 Ознакомление со схемой лабораторной работы
Для выбора схемы необходимо в окне MATLAB (рисунок 6.1) выбрать в качестве текущего каталога папку, в которой находится файл со схемой асинхронного двигателя с фазным ротором: «C:\MATLAB6p5\work\AD\AFR\AFR.mdl». На экране появится схема модели лабораторной работы для исследования асинхронного двигателя с фазным ротором, представленная на рисунке 6.12.
Рисунок 6.12 - Схема модели лабораторной работы для исследования двигателя с фазным ротором
Схема аналогична схеме двигателя с короткозамкнутым ротором, отличием является блок AD, в настройках которого указан фазный ротор и наличие блоков добавочного сопротивления R>2_>>dobav> в каждой фазе ротора.
6.5.2 Ввод данных в модель
Данные исследуемого двигателя для своего варианта (таблицы П4 и П6) необходимо ввести в модель, для этого необходимо дважды щёлкнуть левой кнопкой мыши по блоку асинхронной машины AD и в открывшемся окне ввести данные двигателя. В качестве примера использован двигатель 4АНК160М4У3.
6.5.3 Пуск при заданном пусковом сопротивлении
Воспользовавшись блоком «Ввод данных», в меню установить добавочное пусковое сопротивление для своего варианта (таблица П6). Это сопротивление обеспечивает пуск двигателя при значении пускового момента, равного 0.85 от критического.
Блок Klych и Dinamika установить в верхнее положение, открыть блок М2 и установить в нём значение равное 0.
Запустить систему на моделирование, двигатель начнёт разгоняться, и скорость дойдёт до холостого хода, в установившемся режиме остановить модель. Открыть блок «Построение механической характеристики», в графическом окне Figure построится динамическая механическая характеристика пуска двигателя (рисунок 6.13). Если необходимо, вызвать редактор свойств осей и изменить пределы осей X и Y до удобных. Сохранить характеристику как рисунок в предварительно созданной папке на диске. Окно с характеристикой закрыть. Открыв блок «n, M, I1=f(t)» просмотреть переходные процессы скорости, момента и тока статора во времени (рисунок 6.14). Скопировать в буфер активное окно, т.е. окно с переходными процессами, откуда их можно вставить в графическую программу Paint или в Word. Сохранить рисунок с переходными процессами в ранее созданной папке для создания отчёта.
Рисунок 6.13 - Динамическая механическая характеристика двигателя при пуске без нагрузки с пусковым сопротивлением
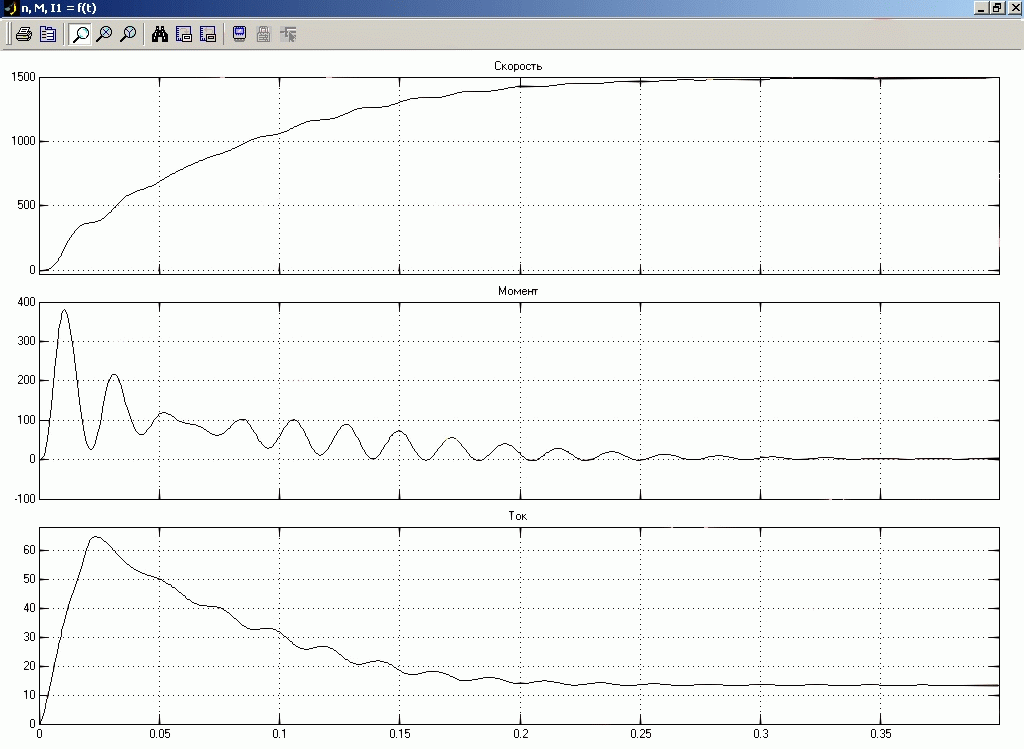
Рисунок 6.14 - Переходные процессы скорости, момента и тока статора при пуске без нагрузки с пусковым сопротивлением
6.5.4 Снятие естественной механической характеристики
Воспользовавшись блоком меню «Ввод данных», установить добавочное сопротивление равное 0. Блок Klych и Dinamika переключить в нижнее положение. В блоке α•М2 задать скорость нарастания нагрузки в графе Slope равной 0,15•М>н>.
Запустить систему на моделирование, выполнение проводить аналогично пункту 6.4.5.
6.5.5 Построение естественных рабочих характеристик
Рабочие характеристики снимают при увеличении нагрузки от холостого хода до 1.3 номинальной.
Опыт производится аналогично пункту 6.5.4. Запустить систему на моделирование, при нагрузке более 1.3 от номинальной остановить модель. Открыв блок «Построение рабочих характеристик», получить снятые характеристики (рисунок 6.15) и сохранить их на диск как рисунок.
Повторить опыт, сняв одну точку при нагрузке М>2>=0.5ּМ>н> аналогично пункту 6.4.6.
Рисунок 6.15 - Рабочие характеристики
6.5.6 Снятие искусственных механических характеристик
Во всех опытах ключ Dinamika в нижнем положении.
При разном значении U>1>
Снять естественную и искусственные характеристики при трёх значениях U>1> и построить их в одних осях. Естественная характеристика снимается при U>1>= U>1н>. Для снятия искусственных характеристик необходимо задать напряжение U>1>< U>1н>, открыв блок «Ввод данных», при этом на экране появится меню. Нажав кнопку «Амплитуда фазного напряжения (V, B)» в окне команд MATLAB появится приглашение ввести новое значение напряжения, следует ввести его и нажать «Enter» (рисунок 6.11), по завершении ввода данных нажать «Выход».
Опыт проводить по методике пункта 6.4.5 при значениях напряжения 0.5U>1н>, 0.75U>1н >и U>1н>, снятие характеристики в генераторном режиме не производить. Результаты представлены на рисунке 6.16.
Рисунок 6.16 - Механические характеристики при трёх значениях U>1>
Снять естественную и искусственные характеристики при трёх значениях добавочного сопротивления в цепи ротора и построить их в одних осях. Для снятия характеристик необходимо ввести через меню ввода данных добавочное сопротивление равное 0, R>2пуск> и 0.5 R>2пуск>. Методика снятия характеристик аналогична пункту 6.5.6.1. Результаты представлены на рисунке 6.17.
Рисунок 6.17 - Механические характеристики при трёх значениях R>2доб>
Снять естественную и искусственные характеристики при трёх значениях U>1> и R>2доб>, и построить их в одних осях. Для снятия характеристик необходимо задать через меню ввода данных R>2доб >= 0 при U>1>= U>1н,> R>2доб >= R>2пуск> при напряжении 0.8U>1н> и R>2доб >= 0.5R>2пуск> при напряжении 0.9U>1н>. Методика снятия аналогична пункту 6.5.6.1. Результаты представлены на рисунке 6.18.
Рисунок 6.18 - Механические характеристики при трёх значениях R>2доб> и U>1н>
7. РАЗРАБОТКА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ВИРТУАЛЬНЫХ ЛАБОРАТОРНЫХ РАБОТ
В ходе разработки виртуальных лабораторных работ возникла необходимость в дополнительных программах. Эти программы написаны на встроенном в MATLAB языке программирования, который носит название
Как уже было сказано в разделе 5, в схеме имеются специальные блоки «Ввод данных», «Построение механической характеристики» и «Построение рабочих характеристик», при открытии которых вызываются необходимые программы. Назначение этих блоков понятно из их названия и также описано в пункте 5.
Блок «Ввод данных» использует программу «AKZ_menu.m» или «AFR_menu.m», в зависимости от исследуемого двигателя с короткозамкнутым или фазным ротором.
Данная программа позволяет ввести в блоки схемы необходимые данные, и основана на условии выбора одной из предложенных позиций. При выборе, какой либо позиции предлагается ввести значение необходимой величины, которое впоследствии вводится в параметры блока в схеме, тем самым позволяет избежать многократного процесса изменения значения это величины, если она используется несколькими блоками.
Блок «Построение механической характеристики» использует программу «n_f_M.m». Данная программа отвечает за построение механической характеристики. Она считывает данные вектора скорости и момента, формирует графическое окно Figure, название характеристики, оси и подписи осей и в полученном окне строит механическую характеристику.
Блок «Построение рабочих характеристик» использует программу «Rabochiе.m». Программа аналогична выше описанной, считывая данные входной и выходной мощности, тока статора, скольжения, КПД и коэффициента мощности она выполняет построение рабочих характеристик в графическом окне Figure..
Для упрощения расчёта данных для двигателя написана следующая программа «Raschet_Dvigok.m». Эта программа реализует переход от параметров Г-образной схемы замещения к Т-образной и рассчитывает параметры необходимые для моделирования.
8. РАСЧЕТ ЗАТРАТ НА РАЗРАБОТКУ ПРОГРАММНОГО МАТЕМАТИЧЕСКОГО ОБЕСПЕЧЕНИЯ (ПМО)
8.1 Исходные данные
количество форм переменной входной информации –два;
сложность алгоритма – три;
количество форм выходной информации – два;
степень новизны комплекса задач – В;
сложность алгоритма – три;
объём входной информации – до 50000 документострок;
сложность организации контроля входной информации – 11;
сложность организации контроля выходной информации – 22;
использование стандартных типов проектов и моделей – 25 %;
проект разрабатывается с учётом обработки информации в режиме работы в реальном времени.
8.2 Определение затрат времени на разработку (ПМО) по стадиям проектирования
Расчёт произведён по литературе [8] и данные сведены в таблице 8.1.
Таблица 8.1 - Определение затрат времени на разработку программного обеспечения по стадиям разработки проекта
СтадияРазработки Проекта |
Затраты времени |
Поправочный коэффициент |
Затраты времени с учётом ПК, дней |
|||
Значение,дней |
Осно-вание |
Значение |
Основание |
|||
|
1 Разработка технического задания |
||||||
|
Затраты времени разработчика постановки задачи Затраты времени разработчика ПО |
29,00 29,00 |
Таблица 4.1 норма 13Г Таблица 4.1 норма 13Г |
0,65 0,35 |
Примечание к таблице 4.1 Примечание к таблице 4.1 |
18,85 10,15 |
|
|
2 Разработка программы |
||||||
|
Затраты времени разработчика постановки задачи Затраты времени разработчика ПО |
44,00 44,00 |
Таблица 4.2 норма 13Г Таблица 4.2 норма 13Г |
0,7 0,3 |
Примечание к таблице 4.2 Примечание к таблице 4.2 |
30,8 13,2 |
|
|
3 Отладка программы |
||||||
|
Затраты времени разработчика постановки задачи |
14,00 |
Таблица 4.27 норма 3В |
К>1>=0,832 К>2>=1 К>3>=1,26 К>общ>=1,05 |
п.1.7(таблица 1.1) п.1.7(таблица 1.3) п.1.9(таблица 1.5) К>общ>=К>1>∙К>2>∙К>3> |
14,7 |
|
|
Затраты времени разработчика ПО |
12,00 |
Таблица 4.28 норма 3В |
К>1>=0,832 К>2>=1 К>3>=1,26 К>общ>=1,05 |
п.1.7(таблица 1.1) п.1.7(таблица 1.3) п.1.9(таблица 1.5) К>общ>=К>1>∙К>2>∙К>3> |
12,6 |
Исходя из таблицы на разработку программного математического обеспечения одному человеку требуется 179 дней. Норма рабочего времени на 2006 год составляет 168 часов в месяц, т.е. 168/8=21 день в месяц.
8.3 Основная заработная плата программиста в месяц
ЗП>1>=ЗП>Т12>∙(К>р>∙К>нс>∙К>сев> – 1)∙К>н>, (8.1)
где ЗП>Т12> –тарифная заработная плата программиста двенадцатого разряда по единой тарифной сетке, ЗП>Т12>= 2317,68р
К>р>- районный коэффициент, К>р>=1,3;
К>нс>- коэффициент, учитывающий непрерывный стаж работы, К>нс>=1,2;
К>сев>- северный коэффициент, К>сев>=1,25;
К>н>- коэффициент начисления на заработную плату, К>н>=1,85.
ЗП>1>=2317,68∙(1,3∙1,2∙1,25-1)∙1,85=4073,3 р.
Полная заработная плата программиста в месяц, р
ЗП>0>=ЗП>1>∙(1+Р>ФСН>/100)∙(1+Р>ДЗ>/100), (8.2)
где Р>ФСН> – отчисления в фонд социальных нужд, Р>ФСН>=26 %;
Р>ДЗ> – отчисления на дополнительную заработную плату, Р>ДЗ>=8 %.
ЗП>0>=4073,3∙(1+8/100)∙(1+26/100)=5542,9 р.
Затраты на выплату ЗП исполнителю программы
 руб.,
(8.3)
руб.,
(8.3)
где Н>ВР> – расчетная норма времени на разработку программы, дней;
Ф>ВР> – месячный фонд времени, дней. Ф>ВР> = 21.
8.4 Расчет затрат на требующееся машинное время
Результирующий поправочный коэффициент
 ,
(8.4)
,
(8.4)
где К>1> – коэффициент, учитывающий степень новизны, группу сложности алгоритма, К>1 >= 1;
К>2 >- коэффициент, учитывающий объем входной информации, = 1,07.
Затраченное машинное время
 ,
(8.5)
,
(8.5)
где НВР – время работы ЭВМ, НВР = 66 часов.
 часов.
часов.
Затраты машинного времени равны
 руб.,(8.6)
руб.,(8.6)
где СТ – стоимость одного часа машинного времени (по данным вычислительного центра ДВГТУ), СТ = 65р.
8.5 Расчет суммарных затрат на разработку ПМО
 руб. (8.7)
руб. (8.7)
8.6 Экономическая эффективность
Полученная виртуальная модель лабораторной работы намного превосходит по техническим и экономическим возможностям реальную физическую лабораторную установку. В созданной виртуальной лабораторной работе имеется широчайший спектр возможностей по исследованию асинхронной машины в различных режимах работы, что в реальной лаборатории требует больших финансовых расходов из-за дороговизны необходимого оборудования и затрат на электроэнергию.
Большим плюсом разрабатываемых лабораторных работ является то, что виртуальную лабораторию можно использовать в дистанционном обучении студентов и в различных учебных заведениях, где нет возможности поработать в реальной лаборатории. Единственное, что необходимо для работы виртуальной лаборатории, это наличие персонального компьютера, который в наше время является общедоступным и имеется в каждом учебном заведении.
9. ЭЛЕКТРОБЕЗОПАСНОСТЬ ПРИ РАБОТЕ ЗА КОМПЬЮТЕРОМ
9.1 Вопросы эксплуатации
Ни для кого не секрет, что компьютеризацию сегодня принято считать панацеей – только компьютер может повысить эффективность образования и промышленности, банковского дела и торговли, объединить через Интернет весь мир. И, очевидно, эта "пандемия" неостановима. Как всякий новый этап в развитии общества, компьютеризация несет с собой и новые проблемы. И одна из наиболее важных – экологическая. Много слов в печати и в других СМИ сказано о вредном влиянии компьютера на здоровье пользователей. Некоторые бойкие авторы даже грозят вымиранием человечеству, сидящему за дисплеями. Необходимо объективно оценивать эти проблемы, ибо для борьбы с любой опасностью, прежде всего надо знать, что она собой представляет! У экологической проблемы компьютеризации две составляющие. Первая определяется физиологическими особенностями работы человека за компьютером. Вторая – техническими параметрами средств компьютеризации. Эти составляющие – "человеческая" и "техническая" – тесно переплетены и взаимозависимы. Исследования подобных проблем – предмет эргономики, науки о взаимодействии человека, основной целью которой является создание совершенной и безопасной техники, максимально ориентированной на человека, организация рабочего места, профилактика труда. Эргономика изучает трудовую деятельность в комплексе, в ней объединяются научные дисциплины, развивавшиеся прежде независимо друг от друга.
9.2 Влияние работы за компьютером на организм человека
Зрительная работа - уже в первые годы компьютеризации было отмечено специфическое зрительное утомление у пользователей дисплеев, получившее общее название "компьютерный зрительный синдром" (CVS-Computer Vision Syndrome). Причин его возникновения несколько. И, прежде всего – сформировавшаяся за миллионы лет эволюции зрительная система человека, которая приспособлена для восприятия объектов в отраженном свете (картин природы, рисунков, печатных текстов и т. п.), а не для работы с дисплеем. Изображение на дисплее принципиально отличается от привычных глазу объектов наблюдения – оно светится; состоит из дискретных точек; оно мерцает, т. е. эти точки с определенной частотой зажигаются и гаснут; цветное компьютерное изображение не соответствует естественным цветам (спектры излучения люминофоров отличаются от спектров поглощения зрительных пигментов в колбочках сетчатки глаза, которые ответственны за наше цветовое зрение). Но не только особенности изображения на экране вызывают зрительное утомление. При работе на компьютере часами у глаз не бывает необходимых фаз расслабления, глаза напрягаются, их работоспособность снижается. Большую нагрузку орган зрения испытывает при вводе информации, так как пользователь вынужден часто переводить взгляд с экрана на текст и клавиатуру, находящиеся на разном расстоянии и по-разному освещенные. В чем же выражается зрительное утомление? Сегодня уже миллионы пользователей жалуются на затуманивание зрения, трудности при переносе взгляда с ближних на дальние и с дальних на ближние предметы, кажущееся изменение окраски предметов, их двоение, неприятные ощущения в области глаз – чувство жжения, "песка", покраснение век, боли при движении глаз.
Микротравма - это постепенный износ организма в результате ежедневных нагрузок. Большинство нарушений в организме происходит из-за накапливающихся микротравм. Такой тип повреждений не возникает вдруг, как перелом руки или ноги (микротравма). Прежде, чем вы почувствуете боль, может пройти несколько месяцев сидения в неправильной позе или повторяющихся движений. Боль может ощущаться по-разному: в виде жжения, колющей или стреляющей боли, покалывания.
Повторяющиеся действия - приводят к накоплению продуктов распада в мышцах. Эти продукты и вызывают болезненные ощущения. Очень трудно предотвратить повторяющиеся движения кистей и ладоней при работе на компьютере, однако регулярные перерывы и упражнения на растягивание мышц могут это предотвратить.
Осанка - это положение, которое принимает ваше тело, когда вы сидите за компьютером. Последствия при неправильной осанки:
- головные боли,
- боль в шее,
- боль в руках и кистях.
Электромагнитное излучение - Спектр излучения компьютерного монитора включает в себя рентгеновскую, ультрафиолетовую и инфракрасную области, а также широкий диапазон электромагнитных волн других частот. Опасность рентгеновских лучей специалисты считают пренебрежимо малой, поскольку этот вид излучения поглощается веществом экрана. В настоящее время внимание исследователей привлекают биологические эффекты низкочастотных электромагнитных полей, которые до недавнего времени считались абсолютно безвредными, так как, в отличие от ионизирующих излучений, низкочастотные электромагнитные поля не могут расщеплять или ионизировать атомы, т.е. не обладают свойствами, которые ряд ученых связывают с возникновением опухолей и других заболеваний. Однако результаты сотен лабораторных экспериментов, начавшихся в 60-х годах и разросшихся в 70-х и 80-х, показывали, что электромагнитные поля с частотой 60 Гц могут инициализировать биологические сдвиги (вплоть до нарушения синтеза ДНК) в клетках животных. Эпидемиологические исследования и работы другого рода показали, что существует несомненная связь между нахождением в местах, где проходят линии электропередача, и возникновением опухоли у детей. Для того чтобы ограничить потенциально опасные излучения видео дисплейных терминалов пользователь может предпринять следующие шаги.
9.3 Физиологические меры безопасности работы человека за компьютером
Зрительная профилактика - плотно закрыть глаза руками так, чтобы через них не проходил свет. Следить при этом за тем, чтобы посадка была удобной. Особое внимание - на спину и шею, они должны быть прямыми и расслабленными. Закрыв глаза, попытаться увидеть перед глазами абсолютно черный цвет. Удастся это не сразу, скорее всего, постоянно будут возникать цветные полоски, ромбики и кляксы. Чем чернее будет цвет, тем лучше расслаблены глаза. Многие людей со слабой близорукостью могут добиться полного восстановления зрения сразу после выполнения этого упражнения.
Комплекс упражнений:
Плотно закрыть и широко открыть глаза 6 - 7 раз в течение 30 секунд.
Посмотреть вверх, вниз, вправо, влево, не поворачивая головы.
Вращать глазами по кругу вниз, вправо, вверх, влево и затем в обратную сторону.
Быстро-быстро моргать веками в течение 1-2 минут.
Закрыть веки, а затем массировать их круговыми движениями пальцев в течение минуты.
Повторять каждое упражнение 2-3 раза с интервалом 1-2 минуты. Второе и третье упражнения делать не только с открытыми, но и с закрытыми глазами. Делать упражнения регулярно.
Избавления от микротравм - цель упражнения: укрепление мышц задней стороны шеи для улучшения осанки и предотвращения болей в области шеи. Упражнение способствует предотвращению:
- синдрома запястного канала,
- втягиванию шеи вперед,
- дисфункции височно-нижнечелюстного сустава,
- грыжи межпозвоночных дисков шейного отдела,
- синдрома верхней апертуры грудной клетки.
Поза: сидя или стоя, взгляд направлен прямо, а не вверх и не вниз. Надавив указательным пальцем на подбородок, сделать движение шеей назад. В этом положении следует оставаться в течение 5 секунд.
Разминка - цель упражнения: растягивание мышц-разгибателей запястья и пальцев (мышц, проходящих через запястный туннель и входящих в кисть руки). Увеличение притока крови по сосудам, проходящим через запястье и ладонь.
Профилактика синдрома запястного канала:
Поза: сидя или стоя, левая рука вытянута на уровне плеч. Отогнув левую кисть назад, так, чтобы пальцы были направлены в потолок, правой рукой осторожно потянуть назад пальцы на левой руке, немного отгибая кисть назад. В этом положении следует оставаться в течение 10 секунд
Правильная осанка - при работе за компьютером лучше всего сидеть на 2,5 см выше, чем обычно. Уши должны располагаться точно в плоскости плеч. Плечи должны располагаться точно над бедрами. Голову нужно держать ровно по отношению к обоим плечам, голова не должна наклоняться к одному плечу. При взгляде вниз, голова должна находиться точно над шеей, а не наклоняться вперед.
Защита от электромагнитного излучения - поскольку источник высокого напряжения компьютера - строчный трансформатор - помещается в задней или боковой части терминала, уровень излучения со стороны задней панели дисплея выше, причем стенки корпуса не экранируют излучения. Пользователи должны находится не ближе чем на 1.2 м от задних или боковых поверхностей соседних терминалов. Ряд специалистов рекомендует сидеть на расстоянии 70 см от экрана своего дисплея. Кроме всего прочего на экран монитора рекомендуется устанавливать специальные фильтры. Хотя фильтры и не полностью поглощают магнитное поле, они все же частично экранируют его, а также устраняют статические поля. При этом следует отметить фильтры ERGOSTAR (на 99% ослабевающие электростатическое поле, на 95-99% (в зависимости от частоты) подавляющие электромагнитное поле, исключающие мерцание экрана и блики). Фильтр всегда должен быть заземлен. К иному классу болезней, связанных с работой на компьютере, являются болезни, связанные с переутомлением зрения. К их числу можно отнести возникновение близорукости и переутомления глаз, а также связанными с ними мигренями, головными болями, раздражительностью, нервному напряжению, стрессу и т.п. Для предотвращения этих болезней следует регулярно совершать перерывы в работе и делать упражнения, расслабляющие глаза. Следует также учесть, что оптимальный перепад яркости в поле зрения не должен превышать 10.
9.4 Технические методы увеличения безопасности работы за компьютером
Рабочее пространство - научная организация рабочего пространства базируется на данных о средней зоне охвата рук человека – 35 - 40 см. Ближней зоне соответствует область, охватываемая рукой с прижатым к туловищу локтем, дальней зоне - область вытянутой руки.
Работа с клавиатурой - неправильное положение рук при печати на клавиатуре приводит к хроническим растяжениям кисти. Важно не столько отодвинуть клавиатуру от края стола и опереть кисти о специальную площадку, сколько держать локти параллельно поверхности стола и под прямым углом к плечу. Поэтому клавиатура должна располагаться в 10 - 15 см (в зависимости от длины локтя) от края стола. В этом случае нагрузка приходится не на кисть, в которой вены и сухожилия находятся близко к поверхности кожи, а на более "мясистую" часть локтя. Современные, эргономичные модели имеют оптимальную площадь для клавиатуры за счет расположения монитора в самой широкой части стола. Глубина стола должна позволяет полностью положить локти на стол, отодвинув клавиатуру к монитору.
Расположение монитора - Монитор, как правило, располагается чрезмерно близко. Существует несколько научных теорий, по разному определяющих значимые факторы и оптимальные расстояния от глаза до монитора. Например, рекомендуется держать монитор на расстоянии вытянутой руки. Но при этом, человек должен иметь возможность сам решать, насколько далеко будет стоять монитор.
Именно поэтому конструкция современных столов позволяет менять глубину положения монитора в широком диапазоне. Верхняя граница на уровне глаз или не ниже 15 см ниже уровня глаз.
Внутренний объем - значимым фактором является под пространство столешницей. Высота наших столов соответствует общепринятым стандартам, и составляет 74 см. Также необходимо учесть, что пространства под креслом и столом должно быть достаточно, чтобы было удобно сгибать и разгибать колени.
Кресло - казалось бы, требования к нему сформулировать предельно просто, - оно должно быть удобным. Но это еще не все. Кресло должно обеспечивать физиологически рациональную рабочую позу, при которой не нарушается циркуляция крови и не происходит других вредных воздействий. Кресло обязательно должно быть с подлокотниками и иметь возможность поворота, изменения высоты и угла наклона сиденья и спинки. Желательно иметь возможность регулировки высоты и расстояния между подлокотниками, расстояния от спинки до переднего края сиденья. Важно, чтобы все регулировки были независимыми, легко осуществимыми и имели надежную фиксацию. Кресло должно быть регулируемым, с возможность вращения, чтобы дотянуться до далеко расположенных предметов.
Положение за компьютером – регулируемое, оборудование должно быть таким, чтобы можно было принять следующее положение:
- поставьте ступни плоско на пол или на подножку,
- поясница слегка выгнута, опирается на спинку кресла,
- руки должны удобно располагаться по сторонам,
- линия плеч должна располагаться прямо над линией бедер,
- предплечья можно положить на мягкие подлокотники на такой высоте, чтобы запястья располагались чуть ниже, чем локти,
- локти согнуты и находятся примерно в 3 см от корпуса,
- запястья должны принять нейтральное положение (ни подняты, ни опущены).
9.5 Требования, предъявляемые к помещениям для ЭВМ
Освещенность. Помещения для ЭВМ должны удовлетворять 1 разряду зрительной работы, подразряды В и Г. При этом, в силу специфики работы на ЭВМ, освещение должно быть искусственным. Нормы освещенности приведены в таблице 9.1 [10].
Таблица 9.1 - Нормы освещенности
-
Разряд зрительной работы
Освещенность
Комбинированное освещение
Общее освещение
1в
2500 лк
750 лк
1г
1500 лк
400 лк
Шум. В залах для ЭВМ предельно допустимый эквивалентный уровень шума не должен превышать 50 дБ. В помещениях, где работают инженерно-технические работники, осуществляющие лабораторный, аналитический или измерительный контроль эквивалентный уровень шума не должен превышать 50 дБ. В помещениях операторов ЭВМ без дисплеев эквивалентный уровень шума не должен превышать 65 дБ. Предельно допустимые уровни звукового давления по отдельным группам частот приведены в таблице 9.2 [11].
Таблица 9.2 - Предельно допустимые уровни звукового давления по отдельным группам частот
|
Частота |
31.5 |
63 |
125 |
250 |
500 |
1000 |
2000 |
4000 |
8000 |
|
Уровень звукового давления, дБ |
86 |
71 |
61 |
54 |
49 |
45 |
42 |
40 |
38 |
Электробезопасность. ЭВМ IBM PC с точки зрения электробезопасности не требует заземления или зануления. Предельно допустимые уровни токов и напряжений прикосновения приведены в таблице 9.3 [12].
Таблица 9.3 - Предельно допустимые уровни токов и напряжений прикосновения
-
Напряжение
не более 2V
Ток
не более 0.3 mA
Микроклимат. Предельно допустимые уровни температуры, относительной влажности и скорости движения ветра приведены в таблице 9.4 [13].
Таблица 9.4 - Предельно допустимые уровни температуры, относительной влажности и скорости движения ветра
|
Холодный период |
Теплый период |
|
|
Температура |
22 - 240С |
23 - 250С |
|
Относительная влажность |
40 - 60 % |
40 - 60 % |
|
Скорость движения воздуха |
0.1 м/с |
0.1 м/с |
Содержание вредных химических веществ в воздухе не должно превышать среднесуточных концентраций для атмосферного воздуха.
ЗАКЛЮЧЕНИЕ
В данной дипломной работе были рассмотрены вопросы разработки виртуальных лабораторных работ по исследованию асинхронных двигателей серии 4А с короткозамкнутым и фазным ротором. Описаны устройство, принцип действия и способы регулирования скорости асинхронных двигателей.
Рассмотрено математическое описание обобщённой асинхронной машины и приведены уравнения для моделирования АД в неподвижной системе координат. По этим уравнениям составлена схема модели АД и проведён анализ переходных процессов в АД и сняты динамическая и статическая механические характеристики.
Поставленная задача реализована в наглядном и эффективном средстве визуального программирования моделей – пакете Simulink программы MATLAB.
Этот пакет также использовался при разработке методики выполнения виртуальных лабораторных работ по исследованию асинхронных двигателей серии 4А с короткозамкнутым и фазным ротором. По этой методике было проведено исследование переходных процессов, пусковых свойств, снятие естественных и искусственных механических характеристик при изменении питающего напряжения, частоты тока и вводе добавочного сопротивления в цепь фазного ротора, а также снятие рабочих характеристик.
Выполнение данной работы имеет практическое значение, и будет использоваться в лаборатории электрических машин кафедры АУТС.
Разработанные виртуальные лабораторные работы намного превосходят по техническим и экономическим возможностям реальную физическую лабораторную установку. В них имеется широчайший спектр возможностей по исследованию асинхронной машины в различных режимах работы, что в реальной лаборатории требует больших финансовых расходов из-за дороговизны необходимого оборудования. Но они не являются полной заменой реальной физической лаборатории, а только дополняют её, путём подготовки студентов, так как студенты должны получить практические навыки работы в лаборатории.
Большим плюсом разработанных лабораторных работ является то, что виртуальную лабораторную можно использовать в дистанционном обучении студентов и в различных учебных заведениях, где нет возможности поработать в реальной лаборатории. Единственное, что необходимо для работы виртуальной лабораторной, это наличие персонального компьютера, который в наше время является общедоступным и имеется в каждом учебном заведении.
Произведён расчёт стоимости затрат на разработку программного обеспечения и экономический эффект от использования виртуальных лабораторных работ.
Рассмотрена техника безопасности, эксплуатация и влияние работы за компьютером на организм человека.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Герман - Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие – СПб.: Корона принт, 2001. - 320 с.
2. Лазарев Ю. Моделирование процессов и систем в MATLAB. Учебный курс. - СПб.: Питер; Киев: Издательская группа BHV, 2005. - 512 с.
3. Китаев В.Е., Шляпинтох Л.С. Электротехника с основами промышленной электроники. Учебное пособие для проф.-техн. учебных заведений. Изд. 2-е, переработ. и доп. М., «Высш. школа», 1968. - 416 с.
4. Яковлев Г.С., Магаршак Б.Г., Маникин А.И. Судовые электрические ашины. Л., «Судостроение», 1972. - 384 с.
5. Сергеев В.Д. Методические указания к лабораторным работам №4 и №5 «Исследование трёхфазного асинхронного двигателя». Редакционно-издательский отдел ДВПИ, 1991. - 24 с.
6. Кравчик А.Э., Шлаф М.М., Афонин В.И., Соболенская Е.А. Асинхронные двигатели серии 4А: Справочник/А90 – М.: Энергоиздат, 1982. - 504 с.
7. Справочник по электрическим машинам: В 2т./С74. Под общ. ред. Копылова И.П. и Клонова Б.К. Т.1.-М.: Энергоатомиздат, 1988. - 456 с.
8. Типовые нормы времени на программирование задач на ЭВМ. – метод. указания М., Экономика 1989. - 125 с.
9. Охрана труда / Под ред. Б.А. Князевского. – М., 1992. - 311 с.
10. СНиП 23-05-95 Нормы освещенности.
11. ГОСТ 12.1.038-82 Предельно допустимые уровни токов и напряжений прикосновения.
12. ГОСТ 12.1.003-81 Предельно допустимые уровни звукового давления по отдельным группам частот.
13. СниП 2.2.2 542-96 Предельно допустимые уровни температуры, относительной влажности и скорости движения ветра.