Математичне моделювання руху поїзда
Вступ
Математична модель в механіці - це замкнута система математичних співвідношень, що дозволяє з прийнятною точністю вивчати особливості поведінки даного об'єкту, що цікавлять дослідника.
Математичне моделювання в механіці керованих систем має ряд особливостей:
Що вивчаються в механіці керованого руху об'єкти надзвичайно різноманітні. Автомобіль, гіроскопічний стабілізатор, крокуючий робот, імітатор космічного польоту і т.п. складаються з різних жорстких конструктивних елементів, пристроїв, датчиків, двигунів. З теоретико-механічної точки зору всі ці об'єкти можуть розглядатися як системи, що складаються з великого числа взаємодіючих твердих тіл. Спроба скласти математичну модель такого об'єкту за допомогою класичних методів теоретичної механіки, наприклад у формі рівнянь Лагранжа, зазвичай приводить до неймовірно громіздких рівнянь, що налічують сотні і тисячі доданків. Виникає потреба в наближеному моделюванні, яке для чітко обумовленого класу руху описує потрібні явища з прийнятною точністю.
Для систем, керованих рухів, що вивчаються механікою, характерні сильні загасання високочастотних власних складових руху. Наближене моделювання таких систем тяжіє до побудови розкладань А. Пуанкаре і погрансольним методам А.Н. Тихонова - А.Б. Васильєвої.
Проникнення математичних методів в найрізноманітніші, часом несподівані сфери людської діяльності означає можливість користуватися новими, як правило, вельми плідними засобами дослідження. Зростання математичної культури фахівців у відповідних областях призводить до того, що вивчення загальних теоретичних положень і методів обчислень вже не становить серйозних труднощів. Але на практиці виявляється, що одних лише математичних пізнань далеко не достатньо для вирішення того або іншого прикладного завдання необхідно ще отримати навики в перекладі початкового формулювання завдання математичною мовою.
Ситуації моделюють для різних цілей. Головна з них необхідність передбачати нові результати або нові властивості явища. Ці прогнози можуть бути пов'язані з розповсюдженням існуючих результатів або мати принциповіший характер. Часто вони відносяться до умов, які, ймовірно, матимуть місце в деякий момент в майбутньому. З іншого боку, прогнози можуть відноситься до подій, безпосереднє експериментальне дослідження яких нездійсненно. Найбільш важливий приклад такого роду дають численні прогнози, які робилися на основі математичних моделей в програмі космічних досліджень. Проте для цієї мети моделюються не всі ситуації: в деяких випадках досить вміти описувати математичними засобами роботу системи для того, щоб добитися глибшого розуміння явища (саме цю роль і грають багато видатних фізичних теорій, хоча на їх основі робляться також і прогнози). Зазвичай при такому математичному описі не враховується елемент контролю, проте в моделях, побудованих, наприклад, для дослідження роботи мереж, таких як схеми руху потягів або літаків, контроль часто є важливим чинником.
Математична модель є спрощенням реальної ситуації. Відчутне спрощення наступає тоді, коли неістотні особливості ситуації відкидаються і складне початкове завдання зводиться до завдання, що ідеалізується, піддається математичному аналізу. Саме при такому підході в класичній прикладній механіці виникли блоки без тертя, невагомі нерозтяжні нитки, нев'язкі рідини, абсолютно тверді або чорні тіла і інші подібні моделі, що ідеалізуються. Ці поняття не існують в реальній дійсності, вони є абстракціями, складовою частиною ідеалізації, зробленій автором моделі. І проте їх часто можна з успіхом вважати хорошим наближенням до реальних ситуацій. Описаний образ дій при побудові математичних моделей не є єдиним, і цьому зовсім не варто дивуватися. У іншому можливому підході першим кроком є побудова простій моделі декількох найбільш характерних особливостей явища. Це часто робиться для того, щоб відчути дане завдання, причому робиться це ще до того, як саме завдання остаточно сформульоване. Потім ця модель узагальнюється, щоб охопити інші факти, поки не буде знайдено прийнятне або адекватне рішення. Є ще підхід, коли із самого початку вводиться в розгляд одночасне велике число чинників. Він часто застосовується в дослідженні операцій, і такі моделі зазвичай вивчають імітаційними методами з використанням ЕОМ.
Актуальність теми. Одна з основних проблем сучасного локомотивобудування - забезпечення високих тягових і динамічних характеристик локомотивів, які в основному визначаються конструкцією екіпажної частини і технічним станом системи колесо - рейка.
У останні десятиліття з метою зменшення силової взаємодії і зносу гребенів коліс і рейок в кривих велася цілеспрямована і системна робота по впровадженню нових профілів коліс і технологій змазування гребенів і рейок. Це значно понизило гостроту проблеми виходу з експлуатації рейок і бандажів локомотивних коліс внаслідок підвищеного зносу. В той же час збільшилася контактно-втомна пошкоджуваність коліс і рейок.
Дослідження динаміки локомотивів і зношування гребенів в більшості теоретичних і експериментальних робіт виконувалися на вибігу, а не під тягою, при контакті нових коліс, у тому числі і з криволінійним профілем, з новими або мало зношеними рейками і без змазування.
Вивчення динаміки з погляду силової взаємодії і зношування гребенів коліс локомотива в режимах вибігу і тяга при різному технічному стані системи колесо - рейка є актуальним завданням.
Розділ 1. Опис фізичних явищ, що впливають на рух поїзда
1.1 Особливості залізничного руху
Технічні параметри. Тяга. Найбільш важливими параметрами, що впливають на рух потягу, є сила тяги локомотива і питомий опір рухомого складу. Останнє виражається з розрахунку на вагу типового (наприклад, вантажного або пасажирського) вагону. Щоб переміщати з малою швидкістю за горизонтальним прямолінійним профілем звичайний вантажний вагон вагою 30 т, необхідна тяга в 90 кг (т.б. до тонни ваги порожнього вагону треба прикласти рушійну силу в 3 кг). Для руху там же того ж вагону з вантажем 60 т буде потрібно тягу всього в 130 кг (т.б. 1,4 кг/т). При русі на малій швидкості пасажирського потягу з вагонами вагою 60 т на тій же ділянці шляху потрібно долати питомий опір 2,2 кг/т. Оскільки пасажирські потяги зазвичай ходять швидше товарних, при їх русі слід враховувати і опір повітря, для подолання якого необхідна додаткова тяга, що у результаті може досягти від 3,6 до 5,4 кг/т в діапазоні швидкостей від 113 до 160 км/г. Питомий опір при важких рейках на баласті з скельного щебеня менший, ніж при легких рейках на м'якому баласті. Окрім вищезазначених чинників, на величину необхідної тяги впливають нахили (так, на ділянці шляху з підйомом в 1% потрібно збільшувати тягу на 9 кг/т) і повороти (кожен додатковий кутовий градус кривизни шляху вимагає від 0,2 до 0,7 кг/т тяги).
Швидкість. Основні обмеження швидкості руху по залізниці диктуються властивостями її полотна, верхньої будови шляху і особливостями конструкції залізничного колеса. Стандартна колія є досить вузькою базою, яка повинна витримувати всі навантаження від залізничного складу. Верхні межі швидкості обумовлені ще і тим, що у кожного колеса гребінь (реборда) є лише з одного боку, і тому практично тільки сила тяжіння утримує вагони і локомотиви на рейках. Джерелами обурень динамічної стійкості рухомих складів є перетини шляхів і їх сполучення з перевідними стрілками. Такого роду перешкоди обмежують швидкість руху величиною 210 км/г при ідеальному стані засобів і устаткування залізниці. Проте цей ідеальний стан практично недосяжний внаслідок багатьох причин. Тому на магістральних залізницях максимально допустима швидкість товарних потягів складає 80–90 км/г. Важко забезпечувати рух на підвищених швидкостях навіть пасажирських потягів, для яких теж існують економічно обгрунтовані обмеження швидкості, пов'язані із зносом і межами міцності конструкції вузлів рухомого складу.
Повороти шляху теж обмежують швидкість. Дію відцентрової сили можна до деякої міри компенсувати, піднімаючи на поворотах зовнішню рейку щодо внутрішньої, але різницю між їх рівнями не можна робити більше 15 див. При повороті на 1R (радіус кривизни повороту 1750 м) не можна розвивати швидкість більше 150 км/г; при повороті на 2S швидкості треба знижувати до 80 км/г; при 3S – до 65 км/г; при 5S (радіус кривизни 349 м) – до 50 км/ч. На швидкісних трасах слід виключати повороти більш 2S. Проте, повороти залізничної колії більш 3S зустрічаються навіть на рівнинах; у гористій місцевості нерідко доводиться робити повороти в 8T і навіть 10T. Обмежує швидкість руху і багато що інше – умови руху по мостах і в тунелях, на перетинах шляхів, на стрілках, на спусках (де особливо важливо контролювати швидкість, враховуючи можливості гальмівної системи).
Тертя між рейкою і залізничним колесом є одним з найважливіших чинників функціонування залізниці. Коли рейки покриваються вологою, їх посипають піском, щоб колеса не пробуксовували. Максимальне значення сили тертя між колесом і рейкою, необхідне для гальмування потягу або його розгону, рівно чверті ваги, що доводиться на це колесо. Оскільки для екстреного прискорення або уповільнення руху залізничного складу необхідне відносне тягове зусилля в 45 кг/т, гальмування зміною навантаження на колесо обмежується максимальним значенням відповідного уповільнення в 8 км/г за 1 секунду.
Габарити одиниці рухомого складу. Важливою характеристикою є габарити вагонів і вантажів, що перевозяться ними, які допустимі при пересуванні мимо придорожніх будов, в тунелях і під мостовими спорудами. На американських залізницях рекомендується залишати стандартний вільний простір шириною 4,9 м до висоти 4,9 м над головками рейок. Таким чином, допустима ширина транспортного засобу не набагато перевищує 3 м в найбільш широкій його частині, а максимальна висота його над рейками обмежена 4,4–4,6 м. Відстань між центральними лініями магістральних шляхів складає 4 м, і, оскільки на поворотах транспортний засіб заносить, довжина одиниці рухомого складу незчленованого типу обмежується 26 м. Кінцеві, старі ділянки дороги і бічні вітки не відповідають стандартним вимогам. Через це залізничному транспорту іноді доводиться здійснювати об'їзди по обхідних маршрутах і нерідко просуватися на малих швидкостях. Всі ці габаритні обмеження роблять вплив на конструктивні рішення і потужність локомотивів.
Навантаження на вісь одиниці рухомого складу є ще однією важливою експлуатаційною характеристикою залізничного транспорту. Вона залежить від різних параметрів: розмірів рейок, розташування шпал, стану залізничного полотна, міцності мостових конструкцій і т.п. Навантаження на вісь може досягати 29 000 кг Внаслідок цього стандартні криті вагони випускаються вантажопідйомністю 50–60 т, хопери – від 70 до 100 т, криті хопери – 100 т. Вага локомотива може досягати 200 т. Зазвичай потужність дизельного тепловоза складає від 2200 до 2650 кВт. Залежно від рельєфу місцевості і загальної ваги складу до нього іноді підчіплюють до 6 тепловозів. При початку руху локомотив може розвивати тягове зусилля, рівне 30% його повної ваги, а на ухилах – до 240 т. Локомотиви тієї ж потужності, призначені для пасажирських потягів, можуть розвивати таку ж тягу при розгоні, а на ухилах – до 18 т на одиницю рухомого складу.
Гальмування. Щоб зупинити потяг, необхідно розсіяти його кінетичну енергію, а на спуску ще і подолати дію кочення сили тяжіння, що становить. Це виконується за допомогою гальм, що встановлених на кожній одиниці рухомого складу і спрацьовують від автоматичного приводу, управління яким знаходиться на локомотиві. Широко використовуються пневматичні гальма. У кожному вагоні є свій резервуар із стислим повітрям, яке при гальмуванні поступає в гальмівні циліндри, так що зупинити будь-який вагон можна і в тому випадку, якщо він відчепиться від складу. Звичайне гальмування здійснюється зниженням тиску повітря в системі, що складається з магістралі, що проходить уздовж всього потягу, і патрубків до гальмівних циліндрів. При непередбаченому відчепленні вагону від потягу його гальмо спрацьовує автоматично. Недоліком такої гальмівної системи є те, що гальма всіх вагонів спрацьовують не одночасно, оскільки швидкість розповсюдження зміни тиску повітря по магістралі не може бути більше швидкості звуку в повітрі (у технічних пристроях вона зазвичай не перевершує 120 м/с). Отже, останній вагон в складі з 150 вагонів починає гальмуватися лише через 15 з після гальмування першого вагону, що приводить до небезпечної затримки гальмування і великої довжини гальмівного шляху.
На пасажирських потягах економічно виправдано застосування більш довершених гальм. У гальмівних системах високошвидкісних потягів використовують електропневматичні гальма, тобто повітряні гальма на кожному вагоні з централізованим електричним їх управлінням. Якщо потяг, що йде із швидкістю 160 км/г, після включення чисто пневматичних гальм пройде ще 2100 м до повної зупинки, то при включенні електропневматичних гальм ця відстань скорочується до 1200 м.
Вага потягу. З урахуванням технічних можливостей залізничного транспорту вага товарних потягів складає 6000–10 000 т, а число вагонів 80–100; вага пасажирського потягу обмежується 1500 т. При цьому витрата енергії і робочих людино-годин на тонно-кілометр перевезень виявляється мінімальниою.
Рух потягів. Розклад і порядок проходження потягів. До появи телеграфу управління рухом потягів на залізницях здійснювалося на основі розкладу і правил, наказаних лінійною адміністрацією. Цими правилами встановлювалися розпорядок переважного пропуску потягів різних класів і мінімальний інтервал від 5 до 10 хвилин між поїздами, що йдуть в одному напрямі. Крім того, спеціальні чергові сигнальники відповідали за безпеку складу, який у разі зупинки відправлявся тільки після підняття ними прапорців, що вирішують початок руху. З введенням телеграфу була створена диспетчерська служба управління рухом потягів, що дозволило вносити зміни до розкладу і правил лінійної адміністрації.
Блок-перегони. Заданий інтервал між поїздами, що проходять, забезпечується шляхом розбиття перегонів між станціями на дрібніші ділянки, іменовані блок-перегонами, на кінцях яких встановлюються блок-пости із засобами сигналізації про зайнятість і свободу ділянки. Спочатку сигнали подавалися уручну станційними і лінійними працівниками залізниць. При цьому сигнал, що вирішує в'їзд потягу на блок-перегін, сигнальник виставляв тільки тоді, коли вже був оповіщений сигнальником наступного блок-перегону про проходження попереду потягу, що йшов. Крім того, при односторонньому русі треба було перевіряти і відсутність стрічного потягу. Пізніше була розроблена система електричної сигналізації, в якій струм пропускався по обох рейках, завдяки чому визначалася не тільки відсутність потягу на блок-перегоні, але і розривів рейок на нім. Ця ж система застосовується і понині. Короткозамкнутий ланцюг утворюється парою рейок і перемичкою з коліс потягу і осі між ними.
Внаслідок великого гальмівного шляху швидкісного потягу необхідно контролювати його наближення до блок-перегону на значній відстані до нього. Тому ще за часів ручної сигналізації були введені завчасні сповіщення про дозвіл або заборону в'їзду на блок-перегін. Здійснити це в системі електричної сигналізації опинилося досить легко, і в простому випадку аналогічні сигнали на послідовних блок-постах придбали один і той же вигляд. Наближаючись до зайнятого блок-перегону, машиніст бачить жовте світло або повернене під кутом 45T крило семафора, встановленого на відстані дещо більше гальмівного шляху від межі зайнятого блок-перегону, де в цей час горить червоне світло або крило семафора розташовано горизонтально. Перше сигнальне свідчення означає «Приготуватися до зупинки біля наступного блок-посту», а друге – «Стоп».
Для збільшення пропускної спроможності шляху встановлюють проміжні сигнальні засоби, свідчення яких дозволяють знов збільшити швидкість на довжині гальмівного шляху, коли раніше зайнятий блок-перегін раптом звільнився. У такому разі першим сигнальним свідченням буде зелене світло над жовтим, що означає «Скинути швидкість до наступного сигнального поста», а свідчення на наступному посту – жовте світло над червоним, що означає «Тихий хід. Приготуватися до зупинки у наступного поста». При цьому потяг, що йшов з малою швидкістю, повинен відразу зменшити її до мінімуму і зупинитися у поста з червоним світлом над червоним, що означає «Стоп». Пізніші удосконалення електричної сигналізації дозволили безперервно відображати свідчення дорожніх сигнальних пристроїв безпосередньо на табло в кабіні локомотива, і погодні умови вже не впливають на здатність машиніста вірно сприйняти сигнал попереду і негайно відреагувати на нього. На деяких дорогах пристрою сигналізації в кабінах локомотивів доповнюються системами автоматичного управління рухом потяги, які приводять в дію його гальма, якщо машиніст не встигає відреагувати на сигнал про необхідність зниження швидкості. Такі засоби автоматики діють на всіх ділянках інтенсивного руху потягів.
1.2 Елементи залізниці
Рейка. Майже всі рейки в поперечному перетині мають тавровий (Т-образний) профіль з плоскою підставою, вузькою вертикальною стінкою і злегка заокругленою по верхніх краях прямокутною головкою. У розвинених країнах зварні рейки замінили рейки, що раніше застосовувалися, завдовжки 12 м, що скріплялися на стиках двоголовними накладками з болтами і гайками. Такі рейки забезпечують безпечніший рух складів без вертикального трясіння на стиках; саме стики найшвидше зношувалися, і їх скасування істотно понизило об'єми ремонтних робіт. Зазвичай між шпалою і підставою рейки вставляється сталева підкладка, чим забезпечуються те, що міцніше скріпляє рейки з шпалою і зменшення зносу внаслідок динамічних ударних навантажень від рухомого складу.
Шпали і баласт. У Західній Європі, Японії і інших місцях, де лісоматеріалів мало і вони дорогі, шпали зазвичай роблять із залізобетону. У США до цих пір широко застосовуються дерев'яні шпали із спеціальним просоченням.
Баласт виконує двояку роль: він служить подушкою шляху і дренирующим шаром для відведення дощової води з полотна. Зазвичай якнайкращим баластом вважається щебінь з твердих скельних порід, роздроблених на шматки розмірами близько 5 см, але як баласт можна використовувати також відходи гірничодобувної промисловості, гальку, гравій і інші подібні матеріали.
У результаті верхній будові додається деяка пружність, завдяки чому рейковий шлях при русі по ньому потягів злегка зміщується вгору-вниз, подібно до пружини. Проте на станціях, в тунелях і на мостах рейковий шлях укладається на жорстку підставу із сталі або бетону.
Ширина рейкової колії. Ширина колії не одна і та ж всюди. Стандартна колія шириною 1,435 м прийнята майже скрізь в Північній Америці і на основних залізничних магістралях країн Західної Європи. Вона ж характерна для Китаю і багатьох інших районів миру. Різновиди широкої колії (з відстанню між рейками шляху від 1,52 до 1,68 м) типові для республік колишнього СРСР, Аргентини, Чилі, Фінляндії, Індії, Ірландії, Іспанії і Португалії. Шляхи з вужчою колією (від 0,6 до 1,07 м) звичайні для Азії, Африки, Південної Америки, а також для другорядних залізниць Європи, особливо в гористій місцевості, і доріг лісовозів Росії.
Кривизна шляху і ухили. Не можна прокласти залізницю взагалі без поворотів, спусків і підйомів, але всі вони знижують ефективність перевезень, бо приводять до обмежень швидкості, довжини і ваги потягів і до необхідності допоміжної тяги. У зв'язку з цим при будівництві залізниць зазвичай використовуються всі можливості для того, щоб зробити дорогу прямо і рівніше.
Нахили на більшості залізничних магістралей не перевищують 1% (т.б. перепад рівня полотна дороги 1 м на її довжині 100 м) від довжини по горизонталі. Нахили, що перевершують 2%, на головних залізницях зустрічаються рідко, хоча в горах бувають і більше 3%. Підйом в 4% для звичайного локомотива практично неможливий, але з ним легко справляється локомотив, оснащений колесом з механізмом зубчатого зачеплення з кремальерою шляху.
Розділ 2.Обгрунтування та вибір математичної моделі руху поїзда
2.1 Дефекти осей колісних пар
Дефекти, що виникають в осях колісних пар протягом терміну їх служби, можуть бути класифіковані по двох групах.
Дефекти першої групи- виробничі; їх запобігання досягається шляхом вдосконалення технологічних процесів і контрольних операцій на підприємстві-виробнику. Дефекти другої групи- експлуатаційні пошкодження, в основному втомного характеру; запобігти їм, в принципі, не можна, але можна своєчасно виявляти в процесі огляду із застосуванням методів неруйнівного контролю до того, як вони досягнуть небезпечної стадії розвитку.
Поєднання профілактичних заходів, здійснюваних в процесі виготовлення і експлуатації (технічного обслуговування), до теперішнього часу в основному забезпечувало безпеку руху. Проте бажання понизити експлуатаційні витрати хоч би за рахунок збільшення міжремонтних пробігів ставить проблеми глибшого вивчення причин виникнення що підлягають усуненню дефектів. Перша проблема стосується корозійних пошкоджень, ефективним способом запобігання яким є нанесення захисного лакофарбного покриття, друга поверхневих пошкоджень, найчастіше виникаючих унаслідок ударів частинок баласту, вірогідність яких зростає у міру зростання швидкості руху потягів.
Визначено два напрями вирішення другої проблеми. Як одне з них розглядають механічний захист (прикриття) осей від вказаних дій. Практичні способи захисту існують, але вони, з одного боку, утрудняють огляд і технічне обслуговування осей, з іншого боку, немає гарантії в тому, що вони надійні у випадках особливо сильних точкових ударів. Отже, викликає цікавість інший напрям- вивчення впливу ударів на цілісність осі для кращого розуміння закономірностей розвитку пошкоджень в цілях його прогнозування і контролю.
Дані дослідження були присвячені впливу надрізів, що виникають в результаті ударів частинок баласту, на зародження і розвиток тріщин в металі осі.
Характер ударних навантажень
В процесі численних спостережень під мікроскопом поверхні осей з надрізами від ударів частинок баласту встановлена різноманітність конфігурацій надрізів. Сліди від більшої частини ударів мають вид численних подряпин і вибоїн невеликої глибини, тоді як від інших, спостережувані рідше, - надрізів завглибшки до 2 мм складної форми з гострими кутами. Більш того, у випадках найбільш сильних ударів виявлявся феномен адіабатичного зрізу, явища того ж типу, що має місце при випробуваннях броньової сталі шляхом обстрілу з дуже високою швидкістю (de/dt = 104 ? 105 с-1). Це доводить, що вісь може піддаватися таким інтенсивним ударним навантаженням, в результаті яких відбуваються квазіадіабатичні деформації.
В ході спостережень визначено багато параметрів мікронадрізів, що впливають на характер тріщіноутворення. До цих параметрів відносяться глибина і профіль мікронадрізу, від яких залежить розподіл напруги, ступінь холодної спайки і наявність смуг адіабатичного зрізу.
В зв'язку з цим цікаво відзначити, що виникнення мікронадрізу від удару з великою швидкістю супроводжується двома протилежно діючими ефектами. Холодний наклеп і залишкова напруга стиснення в зоні мікронадрізу уповільнюють розвиток тріщини, а концентрація напруги в осі, навпаки, прискорює його.
Сильні удари сприяють початку втомного тріщиноутворення, і тому, очевидно, необхідно знайти відповідь на наступне питання: якщо вісь піддається ударам і зона ударної дії не співпадає з місцеположенням тріщин, які можна виявити методами неруйнівного контролю (дефектоскопії), вживаними при огляді, чи можна гарантувати безпеку експлуатації до найближчого заходу на технічне обслуговування.
Це питання вимагає глибших знань в трьох наступних аспектах:
визначення умов початку виникнення тріщин;
оцінка впливу мікронадрізів на розвиток тріщин;
оцінка темпів розвитку тріщин з урахуванням того, що реальний термін служби осей по пробігу приблизно рівний трьом циклам технічного обслуговування і ремонту.
Виникнення тріщин
Виникнення тріщин під впливом тривалих навантажень розглядали як результат концентрації напруги унаслідок экструзії/інтрузії смуг постійного ковзання (Рис. 1).

Рис. 1. Схема утворення інтрузій/экструзій на поверхні металу
Дослідження дозволили визначити декілька стадій процесу:
утворення смуг постійного ковзання в зернах фериту;
поява экструзії/інтрузії;
виникнення уздовж інтрузій мікротріщин і не зв'язаних між собою тріщин невеликої довжини;
розвиток тріщин переважний в зернах фериту уздовж інтрузій в кожному зерні або уздовж меж між зернами фериту і перліту.
Розвиток в основному відбувається під кутом 45° щодо напряму максимальної напруги вигину.
Потім, починаючи з певної довжини, відбувається злиття коротких тріщин в довгі, які розвиваються перпендикулярно напряму максимальної напруги і упоперек зерен перліту.
Одним із завдань досліджень було визначення межі між стадіями зародження і розвитку тріщин в сталях, вживаних для виготовлення осей.
Експерименти проводили на відшліфованих випробувальних зразках , на яких зручно відстежувати виникнення первинних коротких тріщин і відповідно початку стадії розвитку їх перетворення на довгі з одночасним визначенням глибини тріщин по їх формі.
Спостереження за тріщинами з вимірюванням їх довжини в ході досліджень здійснювали за допомогою електронного мікроскопа по методу реплікації. Довжину можна співвіднести з глибиною, визначуваною після шліфовки в різних місцях по фронту тріщини. Крім того, виконуючи мікроскопічні зрізи, можна візуально прослідкувати еволюцію орієнтації тріщин.
Результати досліджень дозволили встановити граничну глибину тріщини 300 мкм, після якої починається стадія розвитку.
Слід зазначити, що до вказаного значення глибини тріщини практично не піддаються виявленню засобами дефектоскопії. Отже, можна припустити, що осі, на яких в процесі поточного огляду дефекти не виявлені, все ж таки можуть мати тріщини, що знаходяться на стадії виникнення або на переході до стадії розвитку.
Вимоги до земляного полотна
Необхідність підвищення пропускної спроможності залізничних ліній, а також збільшення частки залізничного транспорту в перевезеннях пред'являє підвищені вимоги до інфраструктури і, зокрема, до земляного полотна.
Регламентуючі документи
Проектування, будівництво і технічний зміст земляного полотна в Німеччині здійснюють відповідно до норм DS 836. Геотехнічні вимоги в цій інструкції відносяться виключно до шляху на баласті, причому вони дані для двох діапазонів швидкості: до 160 км/г і більше 160 км/г. Ці вимоги повинні виконуватися як при реконструкції тих, що існують, так і при будівництві нових ліній на баластній підставі для швидкісного руху.
Геотехнічні вимоги до земляного полотна безбаластного шляху містяться у відповідному каталозі, який є доповненням до DS 836. На Державних залізницях Німеччини (DBAG) крім цього введені додаткові технічні умови і рекомендації по виконанню земляних робіт.
Вимоги, обумовлені динамічними навантаженнями
На земляне полотно і розташований під ним грунт діють статичні і динамічні навантаження. Вплив статичних навантажень відомий; динамічні навантаження, що викликають значну додаткову напругу в земляному полотні і грунті, залежать від різних чинників, а саме: від вигляду і технічного стану верхньої будови шляху, виду грунту і його шаруватості, типу рухомого складу і його стану, швидкості руху потягів і т.п.
При швидкості руху 100 км/г напруга, викликана динамічними навантаженнями, невелика, якщо шлях і пересувний склад не мають істотних дефектів. У діапазоні швидкості 100 - 160 км/г в окремих видах грунтів вже можуть виникати значні деформації, що підтверджується досвідом експлуатації. При швидкості більше 160 км/г динамічна напруга досягає значень, які необхідно враховувати для грунтів всіх видів.
Результати вимірювань показують, що стискуюча напруга в безбалластном шляху значно нижча, ніж в дорозі на щебеневому баласті (мал. 1).
Вплив швидкості, тобто частка динамічної напруги, в дорозі на баласті виражена значно сильніше. При швидкості 300 км/г в земляному полотні може виникати стискуюча напруга до 100 кН/м2.
Іншим, не менш важливим критерієм є динамічна стабільність земляного полотна, що визначає об'єм робіт по його поточному змісту (таблиця).
|
Оцінка динамічної стабільності земляного полотна и грунту |
|||||||
|
Показник |
Характеристика верхньої будови шляху |
Значеня показника при швидкості поїзда, км/г |
|||||
|
100 |
160 |
200 |
250 |
300 |
350 |
||
|
Швидкість коливань (эффективе значення), мм/с |
Жорстка основа, міцний грунт |
- |
8 |
10 |
13 |
16 |
20 |
|
Балласт, грунт: міцний неміцний |
- - |
16 25 |
20 30 |
26 40 |
32 50 |
40 60 |
|
|
Коэффициент K>dyn> |
Жорстка основа |
1 |
1,1 |
1,15 |
1,2 |
1,3 |
1,3 |
|
Балласт |
1 |
1,4 |
1,6 |
1,8 |
2,0 |
2,0 |
|
|
Примітка. Динамічна складова визначаєтся множенням навантаження, що викликає осадку, на коефіцієнт K>dyn>. |
Динамічна складова навантаження, що враховується коефіцієнтом Kdyn, зростає з підвищенням швидкості. При 300 км/г вона вища, ніж при 100 км/г, на 30 % в дорозі на жорсткій підставі і на 100 % на баластному.
Таким чином, при високій швидкості руху можливість застосування шляху на баласті обмежується за умовами механіки грунтів. Одна з причин цього - звуження зони розподілу стискуючої напруги під шпалами, що неминуче приводить до підвищення їх величини. Якщо додається ще і високий рівень грунтових вод, то земляне полотно досить швидко може прийти в стан, близький до критичного.
Геотехнічні вимоги
До несучих шарів земляного полотна пред'являють певні вимоги відносно розмірів, виду грунту, його щільності і водопроникності. При цьому завжди слід віддавати перевагу земляному полотну і грунту, що володіє рівномірно розподіленою несучою здатністю і щільністю, тим більше що існує метод проведення земляних робіт з суцільним динамічним контролем ущільнення (FDVK), що дозволяє виявити дефектні місця.
Жорстка підстава безбаластного шляху створює інші (в порівнянні з баластним) умови навантаження розташованих під ним шарів грунту. У зв'язку з цим до них пред'являються інші вимоги, зокрема, потрібна мінімальна деформованість. На нових лініях, що реконструюються, є відмінності як в товщині захисних шарів, так і у вимогах до несучої здатності і щільності.
Порівняння геотехнічних вимог до баластних і безбаластних шляхів стосовно нових ліній, що реконструюються, показало, що до шляху на жорсткій підставі вимоги значно вищі.
2.2 Дослідження напруженого стану плями контакту колеса і рейки
Взаємодія колеса і рейки є фізичною основою руху рухомого складу по залізницях. Від параметрів цієї взаємодії багато в чому залежать безпека руху і основні техніко-економічні показники господарств шляху і рухомого складу. Так, зокрема, втрати енергії, обумовлені зношуванням в системі колесо-рейка, складають 10% - 30% паливно-енергетичних ресурсів, що витрачаються на тягу. Крім того, витрати на реновацію рейок і колісних пар складають чималу частину загальних витрат дистанцій шляху і локомотивних і вагонних депо відповідно. Особливо великі витрати у зв'язку з цими витратами несуть локомотивні депо, оскільки за останні півстоліття середній термін служби локомотивної колісної пари істотно скоротився.
Серед причин, що викликали в 60-х – 80-х роках минулого сторіччя значне зростання інтенсивності зношування колісних пар, слід зазначити заміну самшитових підшипників ковзання підшипниками кочення, збільшення довжини і маси потягів, звуження колії до 1520 мм, введення профілю рейок (1979г.), що передбачає двоточковий контакт бандажа з головкою рейки та інші. Все це в сукупності призвело до істотної зміни навантаження зони контакту, температури і умов змазування в цій зоні, а також до зміни середньостатистичній швидкості ковзання колеса в поперечному щодо головки рейки напрямі. Результатом цих змін стало істотне зростання інтенсивності зношування коліс рухомого складу, яке, у свою чергу привело до катастрофічних результатів для локомотивного господарства: до кінця дев'яностих років витрати на реновацію колісних пар досягли неприпустимо великих розмірів.
На мал. 1. і 2. представлені графіки заповнення мережі залізниць Росії загартованими рейками [1] і діаграми структури обточувань колісних пар по експлуатаційному парку локомотивів на мережі залізниць Російської Федерації за 1999 і 2002 рр. [2].

Рис.2 - Заповнення мережі залізниць Росії загартованими рейками

Рис.3 - Структури обточувань колісних пар по експлуатаційному парку
локомотивів на мережі залізниць Російської Федерації за 1999 і 2002 рр.
З порівняльного аналізу діаграм очевидно, що одночасно із зростанням питомої ваги об'ємно загартованих рейок зростає і частка обточувань по зносу гребеня. Така інтенсивність зносу викликала зростання експлуатаційних витрат в локомотивному і вагонному господарствах, пов'язаних з позаплановими обточуваннями колісних пар, додатковим придбанням нових бандажів і коліс.
Відзначимо, що обточування коліс, досягши товщини гребеня мінімального значення, пов'язане із зрізом більшого об'єму металу (так званий технологічний знос) з поверхні катання. Це істотно скорочує термін служби бандажа Рис.4.

Рис.4- Профіль зносу гребеня:
а – профіль зносу 1960 р., б – профіль зносу 1986 р.
З метою зниження інтенсивності зношування КП до прийнятних значень останніми роками проводиться ряд заходів технічного і організаційно-технологічного характеру [3] (поліпшення конструкції шляху і рухомого складу, вдосконалення геометрії профілю поверхні катання КП і рейок, підвищення якості їх металу і т.д.). На жаль жодне з цих заходів в повному об'ємі проблеми не вирішило.
Кардинальне рішення питання може бути знайдене тільки на базі використання наукових знань в області взаємодії пари колесо-рейка. Необхідне проведення науково обгрунтованої модернізації колісних пар з одночасною розробкою заходів, що забезпечують ефективну експлуатацію і ремонт модернізованих колісних пар.
До технологічних заходів щодо зниження зносу бандажів колісних пар локомотивів відносяться наступні заходи: дослідження процесу взаємодії колеса з рейкою і дія на чинники, що впливають на швидкість зношення бандажа, конструктивні заходи щодо підвищення ресурсу, технологічні методи зміцнення бандажів, зменшення тертя між бандажем і рейкою, контроль і прогнозування технічного стану і ін. (Рис.5.).

Рис.5- Заходи щодо зниження зношення бандажів колісних пар
На зносостійкість пари “колесо – рейка” за даними [4] впливають: твердість матеріалу бандажів, рейки, вміст вуглецю, структура металів і вміст сірки. Твердість металу є одним з найбільш важливих чинників, які впливають на зношення коліс рухомого складу. Впровадження за останнє десятиліття термічної обробки рейок і додання їм твердості 360 НВ безперечно зіграло важливу роль в поліпшенні роботи залізниць. Проте із зміною твердості рейок заходів по підвищенню твердості бандажів зроблено не було. В результаті відношення твердостей сталі колеса і рейки стало 0,75, це істотно змінило характер зносу в парі “колесо – рейка”. У дослідженнях Вніїжта [4], [5] 1960 – 1990х років наголошувалося, що для рівної зносостійкості відношення твердості колісного зразка до твердості рейкового зразка повинне бути близько 1,2 при прослизанні до 1%, а при прослизанні до 10% – 1,0 – 1,1.
Таким чином, встановлення
оптимальної твердості поверхні катання
колеса є складним завданням, рішення
якого повинне здійснюватися системно
з обліком, різних параметрів, а величина
твердості поверхні катання коліс на
сьогоднішній час обмежена величиною
>
 >.
>.
Розробка ефективних методів зниження ступеня зносу залежить від наявності методик дослідження, оцінки параметрів контактної взаємодії пари “колесо – рейка” за допомогою чисельних методів.
Завдання контакту кочення двох пружних тіл, що мають однакові характеристики пружності, як для колеса і рейки, може бути представлене роздільно у вигляді нормального і тангенціального завдань. Мета першого завдання полягає у визначенні розміру і форми площадки контакту, а також розподіли нормальної контактної напруги. Результати вирішення нормальної задачі використовуються для знаходження рішення тангенціальною, такою, що полягає в знаходженні розподілу дотичної напруги і моменту в зонах зчеплення і прослизання контактної площадки.
Г. Герц дав перше
надійне математичне рішення нормальної
задачі. Відстань між недеформованими
тілами може бути знайдена геометрично,
якщо відомі радіуси кривизни тіл в точці
контакту. Пружні властивості колеса і
рейки, що описуються коефіцієнтом
Пуассона >
 >
і модулем пружності, вважаються
однаковими. Якщо тіла навантажені
нормальною силою, з'являється зона
контакту еліптичної форми з великою
напіввіссю у напрямі подовжньої осі
рейки представленою на Рис.6.
>
і модулем пружності, вважаються
однаковими. Якщо тіла навантажені
нормальною силою, з'являється зона
контакту еліптичної форми з великою
напіввіссю у напрямі подовжньої осі
рейки представленою на Рис.6.

Рис.6 - Розподіл нормальної герцевської напруги на площадці контакту
Максимальна контактна
напруга >
 >
може бути розрахована по формулі:
>
може бути розрахована по формулі:
> >
(1)
>
(1)
де >
 >
еквівалентний радіус, залежний від
характерних радіусів взаємодіючих тіл
(колеса і рейка) в місці контакту.
>
еквівалентний радіус, залежний від
характерних радіусів взаємодіючих тіл
(колеса і рейка) в місці контакту.
Таким чином, нормальна напруга на поверхнях катання рейки і колеса залежить від навантаження від колеса на рейку, радіусів поверхонь катання колеса і рейки, властивостей взаємодіючих матеріалів.
Слід мати на увазі, що контактна теорія Герца справедлива при наступних допущеннях:
контактуючі поверхні однорідні і ізотропні;
сили тертя в зоні контакту не діють;
розмір контактної площадки малий в порівнянні з розмірами контактуючих тіл і характерними радіусами кривизни недеформованих поверхонь;
для контактного завдання використано вирішення лінійного пружного напівпростору;
контактуючі поверхні гладкі.
При русі екіпажу положення колісної пари по відношенню до рейок істотно міняється, приводячи до виникнення різних поєднань контактних зон колеса і рейки.
Навіть за умови постійного осьового навантаження нормальна напруга істотно мінятиметься внаслідок відмінності в радіусах кривизни контактуючих поверхонь цих зон.
Якщо в області контакту
має місце один радіус кривизни поверхні,
можна використовувати рішення Герца.
Якщо в області контакту є два або декілька
радіусів кривизни, наприклад >
 >
і >
>
і >
 > (Рис.7.),
рішення Герца несправедливе, і для
визначення майданчика контакту слід
використовувати негерцівське
рішення. Це особливо важливо при
різноманітних поєднаннях зношених
профілів колеса і рейки.
> (Рис.7.),
рішення Герца несправедливе, і для
визначення майданчика контакту слід
використовувати негерцівське
рішення. Це особливо важливо при
різноманітних поєднаннях зношених
профілів колеса і рейки.
При знаходженні нормальної контактної напруги для неконформного негерцівського контакту використовуються різні методи і програми. Зокрема, повне розв’язання негерцевскої задачі може бути знайдене за допомогою програми CONTACT [6]. Проте через те, що вирішення задачі за допомогою цієї програми вимагає великого часу, запропоновані різні варіанти наближеного розв’язання негерцівської задачі. Наприклад, з використанням методу апроксимації негерцівській геометрії еліпсами отримані результати, в достатній мірі що узгоджуються з точним рішенням (Рис.7.) [7].
Інший підхід, що використовується для знаходження контактної напруги між зношеним колесом і рейкою, полягає в моделюванні контактуючих тіл з використанням пружної підстави, при якій деформація поверхонь пропорційна нормальній контактній напрузі [8]. Отримана при цьому максимальна контактна напруга буде в 1,3 більше, ніж при герцівському розв’язанні. Розмір площадки контакту і розподіл нормальної напруги залежать від нормального навантаження, що діє від колеса на рейку, профілів колеса і рейки, поперечного і кутового положення колісної пари на рейках і подуклонки рейок.
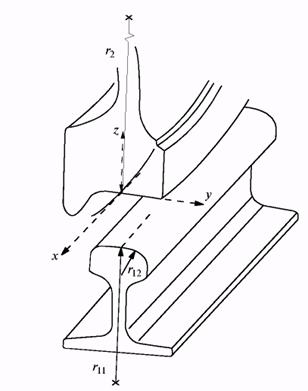
Рис.7 - Геометрія контакту колеса і рейки:
> >
осі системи координат;
>
>
осі системи координат;
>
 >
характерні радіуси (>
>
характерні радіуси (> >
– радіус профілю колеса)
>
– радіус профілю колеса)

Рис.8 - Форма площадки контакту і розподіл тиску:
> >
>
Колісна пара може контактувати з рейкою в двох різних точках [9]. Двоточковий контакт приводить до утворення двох площадок контакту: А на поверхні катання рейки і В на бічній поверхні головки рейки в районі викружки (Рис.9.,а). Внаслідок того що колісна пара при русі в кривій переміщається з деяким кутом набігання а, площадка контакту В зрушена вперед (мал. 8.,б). Збільшення кута набігання приводить до збільшення відстаней між площадками контакту (забігу) і до миттєвої осі обертання колісної пари і тим самим до зростання відносного прослизання і тангенціальної сили, що з ним зв'язана. У зоні того, що стосується гребеня колеса і робочої грані головки зовнішньої рейки рівень розрахункової контактної напруги може досягати 3000 Мпа.
При контакті сильно зношеної рейки з новим або зношеним колесом змінюється форма області розподілу тиску. Розмір площадки контакту істотно зменшується, він зрушується до зовнішньої поверхні зовнішньої рейки, приводячи до збільшення контактного тиску, рівень якого може досягати межі текучості, що викликає пластичну деформацію головки рейки.

Рис.9 - Положення і
розміри контактних майданчиків при
двоточковому контакті колеса і рейки
>
 >:
>:
а) А, В – точки контакту
колеса з рейкою; >
>
осі координат >
 >
кут набігання колеса на рейку; >
>
кут набігання колеса на рейку; >
 >
кут подуклонки рейки; >
>
кут подуклонки рейки; >
 >
вектор швидкості руху колісної пари б)
А, В – майданчики контакту; I, II, III –
області контакту; >
>
вектор швидкості руху колісної пари б)
А, В – майданчики контакту; I, II, III –
області контакту; >
 >
радіуси кривизни головки рейки
>
радіуси кривизни головки рейки
Зазвичай контактна напруга на поверхні катання (область А) колеса вантажного вагону знаходиться в межах 1300 – 1700 Мпа. Збільшення осьового навантаження приводить до зростання контактної напруги пропорційно до її величини (див. формулу 1).
Якщо поверхня катання колеса має прокат з поперечним профілем, що утворився, це призводить до істотного збільшення контактного тиску, який може мати місце по обох сторонах цього профілю. Так, при величині прокату профілю 2 мм розрахункова контактна напруга на обох краях може досягати 6000 Мпа, що свідчить про значний пластичний перебіг матеріалів.
Висока контактна напруга виникає у випадках, якщо профіль колеса своїм зовнішнім краєм спиратиметься на рейку або контактна зона не досягає зовнішнього краю колеса, приводячи до виникнення виступу (фальшивого гребеня) в області зовнішньої частини поверхні катання колеса.
Величина і розподіл контактної напруги істотно залежать від профілів колеса і рейки і від того, який має місце контакт: одноточковий або двоточковий. При конформному профілі розмір площадки контакту збільшується, приводячи до зменшення рівня контактної напруги в порівнянні з неконформними профілями.
Таким чином для оцінки загального напруженого стану в парі колесо-рейка досить вирішити завдання Герца для одноточкового контакту бандажа і рейки. Вирішення задачі проводилося в програмному комплексі ANSYS.
При побудові моделі “колесо – рейка” і проведенні розрахунків розглядався тип рейки Р65 по ГОСТ 18267 – 82, і бандаж ГОСТ 398 – 96, при цьому розглядався незношений профіль бандажа і рейки. Механічні властивості бандажа і рейки, що використовуються для розрахунку представлені в таблиці 1.
Таблиця 1
Механічні властивості бандажа і рейки
|
Механічні властивості |
Бандаж ГОСТ 398 – 96 |
Рейка ГОСТ 18267 – 82 |
|
Щільність, кг/м3 |
7850 |
7850 |
|
Модуль Юнга, Па |
> |
> |
|
Коефіцієнт Пуассона |
0,3 |
0,3 |
 >
>Схема сил, що завантажують колісну пару, представлена на малюнку 9.

Рис.10. Схема сил, що завантажують колісну пару
У глобальній декартовій системі координат проводилося розбиття колісної пари на тетраедричні кінцеві елементи. Кінцево елементна сітка представлена на Рис11.

Рис.11. Кінцево елементна модель пари “Колесо - рейка”
На Рис.12 представлена эпюра розподілу напруги в парі “колесо - рейка”.
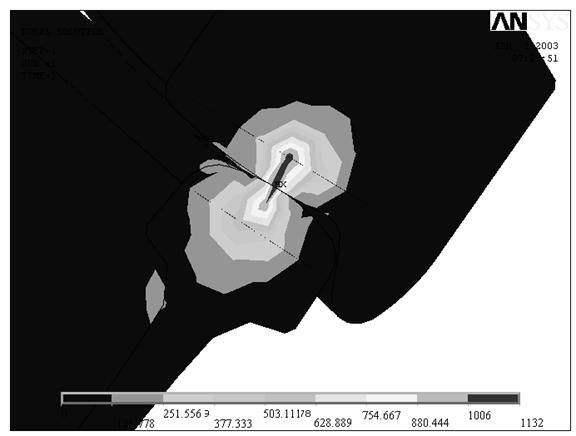
Рис.12. Эпюра розподілу напруги в контакті пари “Колесо - рейка”
При розрахунку було виявлено, що в зоні контакту на поверхні катання колеса напруги досягають значних величин, але вони локалізовані в межах невеликої області. Розмір цієї області порівняємо з розміром плями контакту.
2.3 Оцінка пропускної спроможності залізничної ділянки, що потенційно реалізовується
Важливим показником експлуатаційної роботи залізничної ділянки є пропускна спроможність, визначувана мінімальним, таким, що реалізовується при відповідній системі забезпечення безпеки руху (СЗБР) інтервалом попутного проходження потягів. Методика розрахунку даного інтервалу для різних елементів залізничної ділянки при існуючих СЗБР викладена в спеціальних інструкціях. Проте доцільно оцінити величину мінімального інтервалу попутного проходження потягів, що реалізовується, забезпечуваної при устаткуванні ділянки деякій ідеальною СЗБР, в якій управління поїздом здійснюється на підставі отримання в кожній точці шляху у будь-який момент часу точної інформації про координату, швидкість проходження і шляху екстреного гальмування складу, що йде попереду. Розрахована для ідеальної системи величина інтервалу міжпотягу, а отже, і пропускна спроможність, що потенційно реалізовується, є еталоном при оцінці експлуатаційних показників залізничної ділянки і якості управління в тих, що існують і СЗБР, що розробляються. Завданню визначення інтервалу міжпотягу, що потенційно реалізовується, для різних елементів залізничної ділянки присвячені роботи [1...3]. У даній роботі вирішення вказаної задачі, а також оцінку пропускної спроможності, що потенційно реалізовується, в різних точках залізничної ділянки пропонується здійснювати з використанням спеціальних математичних моделей.
При організації безупинного руху потягів через довільно узяту точку залізничної ділянки можна розглядати як формування в ній послідовності імпульсів з тривалістю Тп, визначуваною довжиною складу l і швидкістю V його проходження.
Період проходження імпульсів обернено пропорційний середньому значенню швидкості складу на даному інтервалі:
 (3)
(3)
При устаткуванні ділянки ідеальної СЗБР, що передбачає управління по координаті кінця потягу, що йде попереду, і використання рівносповільненої моделі службового гальмування, мінімальна можлива відстань між двома поїздами може бути обчислено за формулою:
 (4)
(4)
де а — розрахункова величина уповільнення складу на даній ділянці.
Процес формування імпульсів при постійній швидкості V руху потягів по даній ділянці може бути описаний математичною моделлю, представленою на мал. 1, розробленій на основі моделі частотно-імпульсної модуляції [4]. Нелінійний елемент забезпечує задання швидкості потягу залежно від відстані _S>m> до кінця поїзду, що йде попереду. При досягненні параметром S значення _S>m> виробляється d-функція, використовувана для формування лінійною ланкою прямокутного імпульсу і скидання інтегратора в нуль. Збільшенню швидкості руху на ділянці обов'язково повинне передувати збільшення відстані між поїздами _S>m>.

Рис.14 Математична модель, що описує рух потягів з постійною швидкістю і міжпоїздовим інтервалом, що потенційно реалізовується, по ділянці, обладнаній ідеальною СЗБР
Розрахункова довжина і довжина, що реалізовується в режимі службового гальмування уповільнення потягів визначаються характеристиками залізничної ділянки і рухомого складу, що рухається на нім. Тому доцільно досліджувати залежність що потенційно реалізовується при ідеальній СЗБР інтервалу міжпотягу від встановленої швидкості руху на ділянці. Використання рівносповільненої моделі службового гальмування дозволяє записати:
 (5)
(5)

Рис.14 Залежність інтервалу між потягу, що потенційно реалізовується, від швидкості руху потягів по ділянці, обладнаній ідеальною СЗБР
Досліджуючи функцію на екстремум, досягнемо значення швидкості

при якому
забезпечується мінімальне, рівне
 значення інтервалу міжпотягу. Залежність
даного інтервалу від швидкості руху на
ділянці при різних розрахункових
значеннях довжини і уповільнення складів
ілюструє Рис.14. Тут же в таблиці (див.
мал. 2) приведені значення що потенційно
реалізовуються в точках екстремуму
функції інтервалу міжпотягу Tmin,
а також відповідні кожній точці значення
швидкості Vэкст
і
довжини l
складу.
значення інтервалу міжпотягу. Залежність
даного інтервалу від швидкості руху на
ділянці при різних розрахункових
значеннях довжини і уповільнення складів
ілюструє Рис.14. Тут же в таблиці (див.
мал. 2) приведені значення що потенційно
реалізовуються в точках екстремуму
функції інтервалу міжпотягу Tmin,
а також відповідні кожній точці значення
швидкості Vэкст
і
довжини l
складу.
|
l, м |
100 |
250 |
500 |
750 |
1000 |
|
V>экст>, м/с |
10,95 |
17,32 |
24,5 |
30 |
34,64 |
|
T>min>, с |
18,26 |
28,87 |
40,82 |
50 |
57,74 |
Для оцінки що реалізовується в умовах ідеальної СЗБР інтервалу входу на станцію або ділянку обмеження швидкості передбачається використовувати математичну модель, представлену на мал. 3. Завдання закону зміни швидкості потягу на підході до ділянки її обмеження а або станції б здійснюється за допомогою вхідних до складу моделі нелінійних елементів 1, 2. Елемент 1 відтворює закон зміни швидкості V0, реалізація якого забезпечує проходження складів з мінімально можливим в даному випадку міжпоїздовим інтервалом [1...3]. Елемент 2 визначає зміну швидкості Vи, що реалізовується при досліджуваному процесі управління веденням потягу. Елементи 3, 4 забезпечують ухвалення параметром V значення Vи або V0, що обирається з урахуванням співвідношення швидкостей, що задаються. Призначення елементів 5...7 ідентично призначенню вже розглянутих вище аналогічних функціональних елементів, що входять до складу моделі, представленої на Рис.13.
Розділ 3. Дослідження руху поїзда
3.1 Динаміка гальмування вантажних потягів
Залізничний потяг, що складається з локомотивів і великої кількості вагонів, є складною механічною системою, в якій протікають динамічні процеси, обумовлені силою тяги локомотивів, переломами профілю і плану шляху, гальмуванням і відпуском гальм, різним темпом зміни тиску в магістралі, неоднаковим опором руху вагонів в неоднорідному складі [1, 2].
У тягових і гальмівних розрахунках враховуються повздовжні динамічні і квазістатичні зусилля, що діють на потяг при його рушанні з місця, веденні по перегону і гальмуванні, виходячи з умови безпеки руху по міцності і стійкості рухомого складу.
При перехідних режимах руху виникають нестаціонарні повздовжні коливання в складі унаслідок різкої зміни сили тяги або гальмівної сили. Величину повздовжніх зусиль і можливі удари між вагонами визначають зовнішні сили і відносні швидкості руху вагонів і локомотивів. Квазістатичні зусилля змінюються поволі, але є небезпечними по вичавлюванню вагонів. Вони виникають при тривалому гальмуванні потягу тільки головними локомотивами на крутих затяжних спусках, коли використовують електричне гальмування або допоміжне пневматичне локомотивне гальмо.
Способи теоретичного дослідження перехідних режимів руху вантажних потягів зумовлюються прийнятою розрахунковою схемою потягу. Теоретичне вивчення подовжніх коливань при рушанні потягу з місця було почате Н. Е. Жуковськім, який розглядав склад як безперервну пружну нитку з окремою масою локомотива або як окремі дискретні маси вагонів, сполучені пружними зв'язками, що допускають вільні відносні переміщення при провисанні гвинтового зчеплення. В. А. Лазарян розкрив загальні закономірності хвильового характеру розповсюдження збурень уздовж потягу. Для обліку диссипативных властивостей системи потягу і оцінки впливу опорів взаємних переміщень вагонів склад розглядався як жорсткий стержень або як пружний стержень з гістерезисом. З. У. Вершинській, аналізуючи рух по перелому профілю шляху, приймає потяг у вигляді безперервного і нерозтяжного гнучкого стержня із зосередженими масами (локомотивами) по кінцях.
У подальших дослідженнях динаміки потягу найбільшого поширення набула дискретна, повагонная модель. З'явилася можливість вдосконалення розрахункових схем міжвагонних зв'язків і самих вагонів. Приймаються до уваги не тільки характеристики поглинаючих апаратів автозчеплення, але і пружні властивості конструкції вагону. Враховуються особливості процесів виникнення і розповсюдження гальмівних сил в потягу. Представляючи вагони як двомасові моделі і розглядаючи вантаж як систему з розподіленою масою, досліджується вплив сухих і рідких вантажів на повздовжні коливання в потягу.
Найбільш ефективним методом дослідження є чисельна інтеграція диференціальних рівнянь руху, в яких враховуються параметри всіх елементів механічної системи потягу.
З розширенням можливостей обчислювальної техніки повагонна модель потягу введена складовою частиною в математичну модель локомотив — склад — шлях [3, 4]. Вдосконалена комбінована модель складається з системи рівнянь, що описують повздовжні взаємодії у складі потягу, вертикальну динаміку екіпажу, процеси в тяговому приводі і в контакті коліс локомотива з рейками. З її використанням досліджені перехідні режими руху потягу критичної маси в складних умовах експлуатації. Запропонована методика вибору навантаження електровоза по зчепленню, що забезпечує його ефективну і надійну роботу, розглянутий вибір критичної норми маси потягу. Виконана оцінка вертикальних і подовжніх зусиль і показаний вплив крутизни підйому на процеси подовжньої динаміки в потягу з урахуванням нестаціонарних режимів тяги. Використовувані при цьому підходи є розвитком основних положень теорії тяги і динаміки потягу.
Теоретичне дослідження повздовжньої динаміки гальмування вантажних потягів проведене з використанням математичної повагонної моделі і інтегральних характеристик міжвагонних жорстких зв'язків [5, 6]. Рівняння руху вагону масою mi при гальмуванні на майданчику має вигляд:
 (1)
(1)
Де
 — абсолютне переміщення, швидкість і
прискорення i-го
вагону;
— абсолютне переміщення, швидкість і
прискорення i-го
вагону;
 — залежність гальмівної
сили вагону від абсолютної швидкості
і часу;
— залежність гальмівної
сили вагону від абсолютної швидкості
і часу;
 — переміщення, швидкість
і прискорення i-го
вагону
щодо (i
+
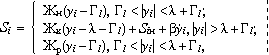
1) -го; Si(yi)
— складова подовжнього зусилля в i-му
зв'язку,
залежна від відносного переміщення
суміжних вагонів; Sаi(yаi)
— складова повздовжнього зусилля,
залежна від відносної швидкості суміжних
вагонів; V
—
швидкість потягу. Визначена залежність
повздовжнього зусилля Si
від
стиснення поглинаючих апаратів
автозчеплення yi
в
міжвагонному з'єднанні:
— переміщення, швидкість
і прискорення i-го
вагону
щодо (i
+
1) -го; Si(yi)
— складова подовжнього зусилля в i-му
зв'язку,
залежна від відносного переміщення
суміжних вагонів; Sаi(yаi)
— складова повздовжнього зусилля,
залежна від відносної швидкості суміжних
вагонів; V
—
швидкість потягу. Визначена залежність
повздовжнього зусилля Si
від
стиснення поглинаючих апаратів
автозчеплення yi
в
міжвагонному з'єднанні:
 (2)
(2)
де Жн, Жр — жорсткість міжвагонного зв'язку відповідно при навантаженні і розвантаженні; Жк — жорсткість конструкції вагону; Siн — зусилля при повному стисненні поглинаючих апаратів; Гl — зазори в міжвагонному з'єднанні; Z — сумарне стиснення апаратів; [ — коефіцієнт в'язкого опору, що враховує властивості вантажу і конструкції вагону. В процесі чисельного вирішення системи диференціальних рівнянь повздовжні динамічні зусилля визначалися відносними переміщеннями, а гальмівні шляхи — абсолютними переміщеннями вагонів. Гальмівні сили вагонів розраховувалися по формулі
 (3)
(3)
де С1,
С2,
С3
—
постійні, залежні від коефіцієнта тертя
гальмівних колодок; Kmax
—
максимальна сила натиснення колодок
вагону; tвi
—
час розповсюдження гальмівної хвилі
до i-го
вагону;
tг,
tх
—
час наповнення гальмівного циліндра
головного і хвостового вагонів
відповідно;  — відношення довжини складу до i-го
вагону
до довжини потягу; n
—
показник, залежний від конструкції
гальм.
— відношення довжини складу до i-го
вагону
до довжини потягу; n
—
показник, залежний від конструкції
гальм.

Рис.15 Залежність повздовжніх зусиль в потягу від швидкості розповсюдження гальмівної хвилі
Вивчений вплив характеристик гальм і вагонів складу на повздовжню динаміку потягу. Найбільший вплив на подовжні динамічні зусилля в складі надають швидкість розповсюдження гальмівної хвилі , час наповнення циліндрів і темп зростання гальмівної сили (Рис 15). Подвійне збільшення швидкості гальмівної хвилі знижує повздовжні збурення — відносні переміщення, зусилля, прискорення — приблизно в 1,5 разу. Характер темпу і час зростання гальмівної сили, залежні від конструкції розподільників повітря і механічного гальмівного устаткування, відображають сумарну дію змінного тиску повітря в циліндрах і коефіцієнта тертя колодок. Найменші зусилля виникають при постійному темпі зростання гальмівної сили вагонів. При спадному або зростаючому темпі зростання гальмівної сили повздовжні динамічні зусилля збільшуються і максимум зусиль зміщується до хвостової частини складу.

Рис.16. Залежність повздовжніх зусиль в потягу від часу наповнення гальмівних циліндрів

Рис.17 Залежність повздовжніх зусиль по довжині потягу від темпу зростання гальмівної сили:1 — постійного; 2 — що убуває; 3 — що зростає
Із зростанням часу наповнення гальмівних циліндрів зусилля зменшуються нерівномірно: спочатку швидше, а потім повільніше. Збільшення цього часу удвічі призводить до зниження повздовжніх динамічних зусиль в середньому в 1,5 рази. Питома гальмівна сила впливає на повздовжні зусилля не так значно, як на гальмівні шляхи: із збільшенням сили натиснення колодок в 2 рази повздовжні зусилля зростають в 1,3 рази, а гальмівні шляхи знижуються в 1,7 рази. При режимах з однаковими гальмівними шляхами максимальні повздовжні зусилля нижчі в потягах з композиційними колодками (Рис.18).

Рис.18. Залежність повздовжніх зусиль від швидкості потягу перед гальмуванням при колодках: 1 — композиційних; 2 — чавунних
Характер розподілу зусиль по довжині складу не залежить від маси вагону: найбільші зусилля в розтягнутому потягу виникають в хвостовій частині складу, а в стислому — в середині складу. Зростання повздовжніх зусиль не пропорційне збільшенню маси і погонного навантаження. При переході від навантажених вагонів до порожніх маса вагонів знижується приблизно в 4 рази, а повздовжні зусилля тільки удвічі. Підвищення погонного навантаження в 1,5 разу збільшує повздовжні зусилля в 2 рази. Постановка легших вагонів однією групою в головній частині складу підвищує зусилля в потягу, а в хвостовій — знижує в порівнянні із зусиллями, що виникають в однорідному потягу рівної маси і довжини. Використання великовантажних вагонів з високим осьовим навантаженням сприяє значному зростанню ваги потягів без збільшення їх довжини.
Із збільшенням щільності потягу (маси одиниці довжини у навантаженого складу) швидкість розповсюдження подовжніх збурень зменшується (Рис.19). Процес розповсюдження ударної хвилі уздовж складу при гальмуванні залежить не тільки від характеристик гальм, але і від величини зазорів в автозчепленнях, маси вагонів, параметрів міжвагоних зв'язків, що визначають швидкість розповсюдження нелінійних хвиль. У стислих потягах збурення розповсюджуються майже в 2 рази швидше, ніж в розтягнутих. У розтягнутих порожніх потягах швидкість розповсюдження збурень в 1,5 разу вище, ніж в навантажених, а в стислих порожніх і навантажених — приблизно однакові. Повздовжні динамічні зусилля в розтягнутих потягах в 2 рази вищі, ніж в стислих (коефіцієнт повздовжньої динаміки рівний 2). При гальмуванні розтягнутого потягу із зазорами в міжвагонних з'єднаннях швидкість розповсюдження повздовжніх збурень залежить від величини похідної в точці силової характеристики, відповідній величині деформації поглинаючого апарату. При м'яких силових характеристиках з спадною похідною амплітуда і темп зміни відносних переміщень і швидкостей руху вагонів спадають по довжині складу. У разі жорстких характеристик зв'язків із зростаючою похідною хвиля обурення не гаситься, а посилюється у міру наближення до хвоста потягу. При жорстких силових характеристиках поглинаючих апаратів час розповсюдження максимальних збурень від одного вагону до іншого зменшується, а при м'яких — залишається приблизно однаковим. Із зростанням маси, що доводиться на одну колісну пару, збільшенням числа осей у вагоні зменшується довжина потягу. У складі з великовантажних вагонів при меншій кількості розподільників повітря знижується перепад тиску в гальмівній магістралі, прискорюється відпустка гальм і зарядка запасних резервуарів в хвостовій частині потягу, підвищується плавність гальмування.

Рис.19. Розповсюдження ударної хвилі уздовж складу при гальмуванні потягу: 1 — порожнього; 2 — навантаженого
Розглянуті
розрахункові криві розподіли максимальних
подовжніх зусиль в потягу масою 6000 т,
сформованому з 70 чотиривісних навантажених
вагонів, коли склад гальмується
локомотивним гальмом і сила пневматичного
гальма локомотива В0
наростає
по залежності  протягом часу Т0,
рівного 5с. На першій ділянці на початку
кривих повздовжні зусилля рівні
гальмівній силі локомотива, а в другій
половині складу перевищують максимальну
гальмівну силу локомотива в 2 рази. При
збільшенні Т0 до 15с протяжність першої
ділянки різко збільшується. Подовжнє
динамічне зусилля в хвостовій частині
складу трохи перевищує В0>.>
Із зростанням величини В0 або її зменшенням
криві подовжніх зусиль переміщаються
паралельно. Отже, протяжність ділянки,
на якій максимальні зусилля не перевершують
гальмівної сили локомотива, визначається
формою наростання B0(t) і часом Т0>.>
протягом часу Т0,
рівного 5с. На першій ділянці на початку
кривих повздовжні зусилля рівні
гальмівній силі локомотива, а в другій
половині складу перевищують максимальну
гальмівну силу локомотива в 2 рази. При
збільшенні Т0 до 15с протяжність першої
ділянки різко збільшується. Подовжнє
динамічне зусилля в хвостовій частині
складу трохи перевищує В0>.>
Із зростанням величини В0 або її зменшенням
криві подовжніх зусиль переміщаються
паралельно. Отже, протяжність ділянки,
на якій максимальні зусилля не перевершують
гальмівної сили локомотива, визначається
формою наростання B0(t) і часом Т0>.>
Розраховані повздовжні динамічні зусилля в потягу масою 10 000 т з великовантажних вагонів при гальмуванні складу електричними гальмами локомотива. У разі наростання гальмівної сили електровозів протягом 20с рівень повздовжніх зусиль в потягу складає 1,0 МН, а при часі зростання 30с подовжні зусилля не перевищують величину максимальної сили гальмування локомотивів, що узгоджується з дослідженням [3]. Таким чином, квазістатичні стискаючі подовжні зусилля, що виникають в потягах на спусках від дії пневматичних або електричних гальм локомотива, обмежуються величиною гальмівної сили.
За наслідками теоретичних і експериментальних досліджень встановлені норми повздовжніх зусиль, що допускаються, у вантажних потягах при екстреному, повному службовому і регулювальному гальмуванні [7]. Запропоновані номограми для розрахунку гальмівних шляхів потягів (Рис.20).
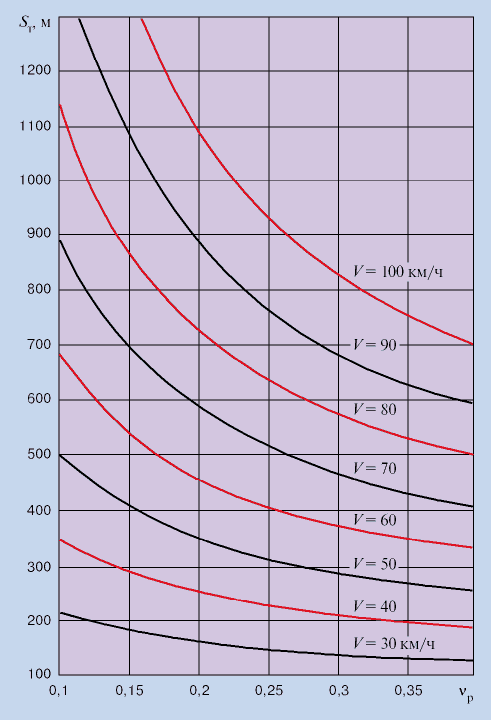
Рис.20. Залежність гальмівного шляху вантажних потягів Sт від гальмівного коефіцієнта '>р >і швидкості V при екстреному гальмуванні на майданчику
Виявлені деякі загальні закономірності і причини обривів потягів в умовах експлуатації. Основні причини — різка зміна стану потягу, перехід частини вагонів із стислого стану в розтягнутий, коли решта частин потягу діє на цю групу вагонів відтяжкою. При дії прямої і зворотної ударної хвилі виникають розтягаючі повздовжні зусилля, що перевищують міцність автозчеплення. Розподіл частоти обривів автозчеплень по довжині потягу залежить від режиму гальмування. Найчастіше обриви відбуваються в головній частині складу, якщо після регулювального гальмування не витримується необхідний час відпустки [8], який визначається довжиною і масою потягу, швидкістю руху, глибиною розрядки гальмівної магістралі, температурою навколишнього повітря. При низьких температурах знижується міцність автозчеплення, і число обривів збільшується (Рис.21).

Рис.21. Залежність обривів автозчеплень від температури повітря
З метою зменшення вірогідності сходу порожніх вагонів у вантажних потягах удосконалюються методи управління автогальмами. Менші повздовжні зусилля виникають, коли легковагі вагони знаходяться в хвостовій частині складу, а повне службове гальмування виконується зниженням тиску в магістралі декількома ступенями. Квазістатичні подовжні зусилля, що діють на вагони при уповільненні складу тільки електричними або пневматичними гальмами локомотива, слід обмежувати часом набору і величиною гальмівної сили. Необхідно знижувати різницю рівнів центрів зчеплення вагонів, що допускається, і максимально зменшувати поперечні зазори у візках.
3.2 Розробка узагальненої математичної моделі просторових коливань вантажного шестиосьового тепловоза
Розробка узагальненої математичної моделі просторових коливань вантажного шестиосного тепловоза, а також опису методики комп'ютерного моделювання. Розрахункова схема локомотива і схема дії сил в системі колісна пара - шлях стосовно колісно-моторного блоку першої колісної пари показані відповідно на рис.1 і 2. Просторові коливання екіпажу тепловоза ТЭ116 визначаються 78 узагальненими координатами.
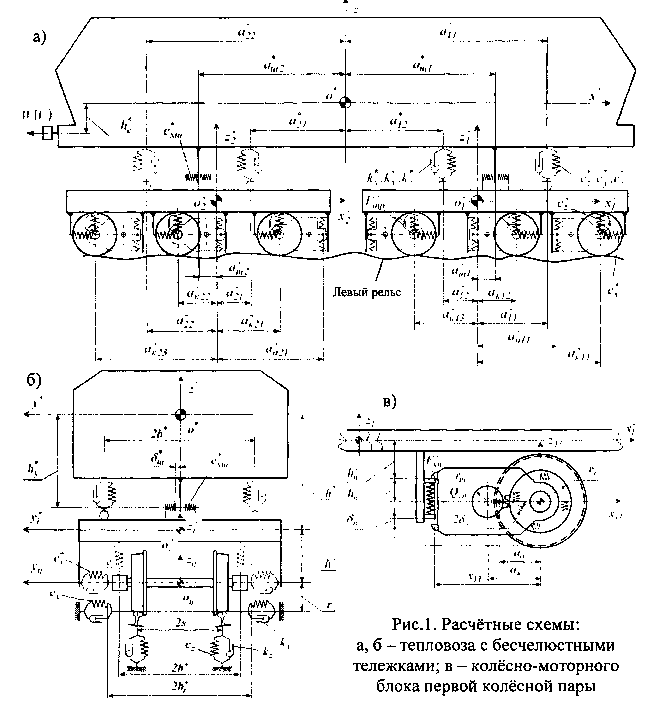

Рис.23. Схема дії сил в системі колісна пара - шлях
У розрахунковій схемі, рис.1, прийняті наступні позначення систем координат для відповідних мас т і моментів інерції J: i, j-ой колісної пари про у, Ху, у у, zy; i-ї рами вагона of, xf, yf, z*; кузови про, х, у, z .
Рівняння повздовжніх коливань кузова
 (4)
(4)
де
 (5)
(5)
деформація пружних елементів зв'язку кузова з візком в подовжньому напрямі; W(y) - опір руху потягу. Рівняння віднесення кузова
 (6)
(6)
де
 нелінійна функція типу "зона
нечутливості".
нелінійна функція типу "зона
нечутливості".
 (7)
(7)
Х= 1,2- номера комплекту опор кузова; р - поточна кривизна шляху; hr - поточне піднесення зовнішньої рейки. Рівняння підстрибування кузова
(8)
Рівняння галопування кузова
 (9)
(9)
Рівняння виляння кузова
 (10)
(10)

нелінійна залежність моменту в опорах кузова.
Рівняння бічної хитавиці кузова
 (11)
(11)
Повздовжні коливання рами i-го вагона
 (12)
(12)
Вертикальні коливання рами i-го вагона
 (13)
(13)
де F_+ - сила тертя фрикційних гасителів коливань; signAiy - нелінійна
Поперечні коливання (віднесення) рами i-го вагона
 (14)
(14)
 (15)
(15)
Галоп рами i-го вагона

(16) (17)
(17)
де /лп - коефіцієнт тертя в парі носик тягового електродвигуна - траверсу підвіски. Бічна хитавиця i-ї рами вагона

(18)
Нижче приведені рівняння коливань колісно-моторного блоку стосовно першої колісної пари.
Повздовжні коливання колісно-моторного блоку
 (19)
(19)
Поперечні коливання колісно-моторного блоку
 (20)
(20)
де тб - маса колісно-моторного блоку; тд - маса тягового двигуна. Вертикальні коливання колісно-моторного блоку
 (21)
(21)
де Рст - статичне навантаження від колісної пари на рейки. Виляння колісний-моторного блоку
 (22)
(22)
де а - відстань від осі колеса до центру мас колісний-моторного блоку.
 (23)
(23)
Поворот лівого колеса колісної пари
 (24)
(24)
де J j - момент інерції лівого колеса з частиною осі і центром зубчатого колеса тягового редуктора;
ск - крутильна (кутова) жорсткість ділянки осі між зубчатим колесом і правим колесом колісної пари;
Мв - нелінійний пружний момент, що діє при відносному повороті лівого колеса і вінця зубчатого колеса. Поворот правого колеса колісної пари
 (25)
(25)
Поворот вінця зубчатого колеса
 (26).
(26).
Висновки
1. Встановлення оптимальної твердості поверхні катання колеса є складним завданням, вирішення якого повинне здійснюватися системно, з обліком, різних параметрів.
2. Твердість поверхні катання коліс в даний час обмежена величиною .
3. Напруга локалізована в межах малої області колеса і рейки. Розмір області порівняємо з розміром плями контакту.
4. Повздовжні зусилля, що виникають при різних режимах гальмування, є одним з основних показників, що враховуються в тягових розрахунках і розрахунках на міцність потягів.
5. Розроблена і підтверджена практикою експлуатації методика для оцінки повздовжніх динамічних зусиль і гальмівних шляхів у вантажних потягах і показаний вплив характеристик гальм на динаміку потягу.
6. Математична модель руху поїзда є необхідною і невід’ємною часткою розвитку сучасної транспортної системи.
Література
Лисицын А.Л., Мугинштейн Л.А., Терещенко В.П. Поезда повышенного веса и длины. Опыт, проблемы, возможности // Железнодорожный
П. Динамика торможения тяжеловесных поездов. М.: Транспорт, 1977. 151 с.
Ступин Д.А., Беляев В.И. Разработка российского эластомерного поглощающего аппарата для автосцепного устройства грузовых вагонов // Вестник ВНИИЖТ. 1998. № 6. С. 29...31.
Исследование динамики поезда с гидрогазовыми поглощающими аппаратами ГА-500 / С.В. Вершинский, П.Т. Гребенюк, Г.В. Костин, А.Д. Кочнов, Ю.М. Черкашин / Сб. науч. тр. ВНИИЖТ. Вып. 649. М.: Транспорт, 1982. С. 49...65.
Баранов Л.А. Потенциальная оценка пропускной способности железнодорожной линии по системам обеспечения безопасности // JYЖЕЛ: «The 7th International scientific conference of railway experts». Yugoslavia, Vrnjacka Banja: 2000. Р. 43...49.
Расчет и оптимизация координатного сближения поездов метрополитена / Л.А. Баранов, А.А. Моисеев, В.М. Абрамов, В.Н. Полоцкий // Вестник ВНИИЖТ. 1992. № 6. С. 24...28.
Шур Е.А. К вопросу об оптимальном соотношении твердости рельсов и колес //Современные проблемы взаимодействия подвижного состава и пути: Материалы научно-практической конференции/ ВНИИЖТ. – М., 2003. с. 87 – 93.
Бартенева Л.И. Технология лубрикации боковой поверхности рельсов передвижными рельсосмазывателями – комплексное решение проблемы износа в контакте гребень колеса – рельс //Современные проблемы взаимодействия подвижного состава и пути: Материалы научно-практической конференции/ ВНИИЖТ. – М., 2003. с. 114 – 122.