Ультразвук с механическими напряжениями
Введение
Современная диагностика состояния конструкционных материалов, располагающая большим арсеналом различных физических методов и средств, уже не ограничивается задачами дефектоскопии, но все более широко используется при решении задач определения механических характеристик материалов, причем основное место здесь занимают методы и средства измерения остаточных и рабочих внутренних напряжений.
В связи с этим обстоятельством на первый план выходят методы технической диагностики, сочетающие механику разрушений, металловедения и неразрушающего контроля. К таким методам относятся, в первую очередь, методы контроля напряженно-деформированного состояния.
Металлические конструкции и детали машин в процессе эксплуатации подвергаются действию переменных во времени механических нагрузок, которые могут стать причиной усталостных изменений структуры металла и накопления микродефектов, а следовательно, образования макродефектов, зарождения трещин и разрушения изделия. Все это может привести не только к материальным потерям, но и в определенных ситуациях к негативному влиянию на окружающую среду и гибели людей.
Одним из представителей такого рода конструкций можно считать ВЛЭП, а вернее протянутые между вышками тросы. За годовой цикл они могут испытать перепады температур от -50 до +50 градусов, при этом на них воздействуют различные виды деформаций: растяжение, сжатие, кручение и другие. Это все может привести к колоссальным потерям.
Подъемная техника используется во многих областях жизнедеятельности человека. В нашем повседневном быту мы используем лифты, при строительстве используем краны, в метро нас спускает эскалатор, где основная часть нагрузки приходиться на проволоки и тросы.
Еще одним из примеров, где проводят оценку напряженно-деформированного состояния, является трубопроводные обвязки. Подвижки грунта, а также нарушение технологии в ходе ремонтных работ могут привести к значительным отклонениям положения трубопроводных обвязок основного оборудования газоперекачивающих компрессорных станций от начального проектного положения. Таким образом, кроме проектных нагрузок, таких как внутреннее расчетное давление, собственный вес труб и арматуры и давление грунта на подземную часть, на трубопроводных обвязках могут действовать напряжения, вызванные деформацией вследствие непроектных смещений обвязки. Данные нагрузки не учитываются проектом и, как показывает практика расчетов, порой даже не очень значительные смещения от проектного положения (на 4-10 мм) могут привести к превышению напряжениями предельно допустимых значений [12]. Это, в свою очередь, ведет к увеличению риска зарождения и развития в зонах действия повышенных напряжений опасных трещиноподобных дефектов.
Существуют различные методы измерения механических напряжений:
рентгеновское определение напряжений – деформацию определяют по изменению межплоскостных расстояний напряженного кристаллита;
тензорезистор – принцип измерения состоит в том, что при деформации изменяется его активное сопротивление;
магнитоанизотропный – определения механических напряжений по величине магнитной анизотропии, вызываемой напряжениями в изотропном ферромагнитном материале;
оптический метод определения внутренних напряжений – при прохождении света в оптически прозрачных материалах возникает двойное лучепреломление, величина которого характеризует степень напряженного состояния контролируемого объекта;
акустическая тензометрия – основана на регистрации изменения скорости распространения упругих волн под влиянием напряжений.
Под действием циклических нагружений микродефекты перерастают в трещины, и их концентрация становится опасной для дальнейшей эксплуатации. Большинство методов позволяет выявить только наличие достаточно крупных трещин. Однако гораздо важнее распознать более раннюю стадию накопления дефектности – образование микротрещин.
Одним из способов решение этой задачи является метод, основанный на регистрации изменения скорости распространения упругих волн под влиянием механических напряжений.
Распространение упругих колебаний в ограниченном объеме по сравнению с безграничной средой налагает на волновой процесс дополнительные условия, которые обычно сводятся к равенству нулю давления на свободных поверхностях или к равенству нулю скорости на абсолютно жестких поверхностях. При этом волновые уравнения колебаний тел ограниченной формы всегда имеют общую структуру: один член уравнения содержит вторую производную по времени смещения, а другой – комбинацию пространственных производных, умноженных на коэффициент, определяемый упругими свойствами и плотностью тела.
Строгое решение уравнений, описывающих колебания тел ограниченной формы с учетом всех граничных условий, особенно в случае твердых тел, в которых связаны три составляющих смещений и шесть составляющих напряжений, часто наталкивается на непреодолимые математические трудности. Поэтому обычно используют определенные упрощения на основе преимущественного характера соотношений между деформациями и смещениями. Это позволяет свести любой сложный волновой процесс к суперпозиции элементарных нормальных волн.
1. Связь скорости ультразвука с механическими напряжениями
1.1 Акустотензометрия
Тензометрия – измерение напряжений и деформаций в твердых телах. Акустическая тензометрия основана на явлении акустоупругости которое заключается в изменении скорости распространения упругих волн под влиянием напряжений.
Упругая
деформация твердых тел описывается
законом Гука
 .
.
Рис. 1. Диаграмма растяжения твердого тела
Модуль Юнга характеризует упругие свойства твердых тел при деформации растяжения – сжатия. Он численно равен величине напряжения, которое вызывает изменение длины образца вдвое, если деформация при этом остается упругой. С другой стороны, модуль Юнга можно понимать как величину, численно равную объемной энергии деформации при удвоении размеров образца. Закон Гука справедлив лишь для идеально упругих тел. Для реальных же тел наблюдаются различные отклонения от этого закона. На рис. 1. представлена [5] характерная диаграмма растяжения твердого тела. Строгая пропорциональность между относительным удлинением и напряжением наблюдается лишь при сравнительно небольших нагрузках, на участке 0А.
Максимальное напряжение >п>, при котором еще выполняется закон Гука, называется пределом пропорциональности.
Максимальное напряжение >уп>, при котором еще не возникают заметные остаточные деформации (относительная остаточная деформация не превышает 0,1%), называется пределом упругости. Ему соответствует точка В на диаграмме деформации.
Предел текучести – это напряжение, которое характеризует такое состояние деформируемого тела, после которого удлинение возрастает без увеличения действующей силы (горизонтальный участок ВС).
Пределом прочности >пр> (точка D) называется напряжение, соответствующее наибольшей нагрузке, выдерживаемой телом перед разрушением.
Отклонения от закона Гука в области напряжений, не превосходящих предела упругости, объединяются общим понятием неупругости. Проявлением неупругости являются, например, упругие последействия и упругий гистерезис, подлежащий экспериментальному наблюдению в данной работе.
Явление упругого последействия заключается в изменении со временем деформационного состояния при неизменной величине напряжения. В этом случае после приложения нагрузки к образцу деформация возникает не мгновенно, а продолжает увеличиваться с течением времени (прямое упругое последействие); также и после снятия нагрузки: деформация образца исчезает не мгновенно, а продолжает уменьшаться во времени (обратное упругое последействие).
Закон Гука, согласно которому напряжение б и деформация е пропорциональны, выполняется приближенно. Более точная зависимость имеет вид степенного ряда.
Степени выше второй не учитывают. Это выражение следует понимать как упрощенное, не учитывающее наличия и взаимодействия деформаций разного типа. Коэффициенты типа С1 называют упругими постоянными или модулями упругости, а коэффициенты типа С2 (в изотропном твердом теле их три) обычно называют коэффициентами Мурнагана или другими терминами. В [2] вопрос рассматривается упрощенно и показано, что

Таким образом, изменение скорости пропорционально напряжению или деформации в контролируемом объекте. Связь между ними определяется акустоупругим коэффициентом. При деформации растяжения скорость уменьшается, а при деформации сжатия – увеличивается. В области пластических деформаций скорость остается практически постоянной. Измерение абсолютных значений скорости с необходимой точностью – трудная задача. Она облегчается тем, что обычно требуется измерить не абсолютную величину, а изменение скорости под влиянием приложенных напряжении (как и в других вариантах тензометрии). Важное достоинство акустической тензометрии – измерение напряжений не только на поверхности, но также внутри ОК.
Определение напряжений в материалах, обладающих собственной анизотропией, требует учета реальной скорости звука в направлении измеряемых напряжений. Например, текстура, возникающая при прокатке дюралюминия Д16, может вызвать изменение скорости по разным направлениям до 0,26%, а изменение скорости под влиянием напряжений – порядка 0,08%; для стали 45 соответственно 0,64% и 0,04%.
Явление динамической акустоупругости заключается в воздействии на ОК переменного поля напряжений скорость ультразвука под их воздействием изменяется приблизительно так же, как в стационарном режиме. Следовательно явление может быть использовано для контроля переменных напряжений. В [2] представлены данные о величине акустоупругого взаимодействия в зависимости от направления приложенного напряжения (рис 2).
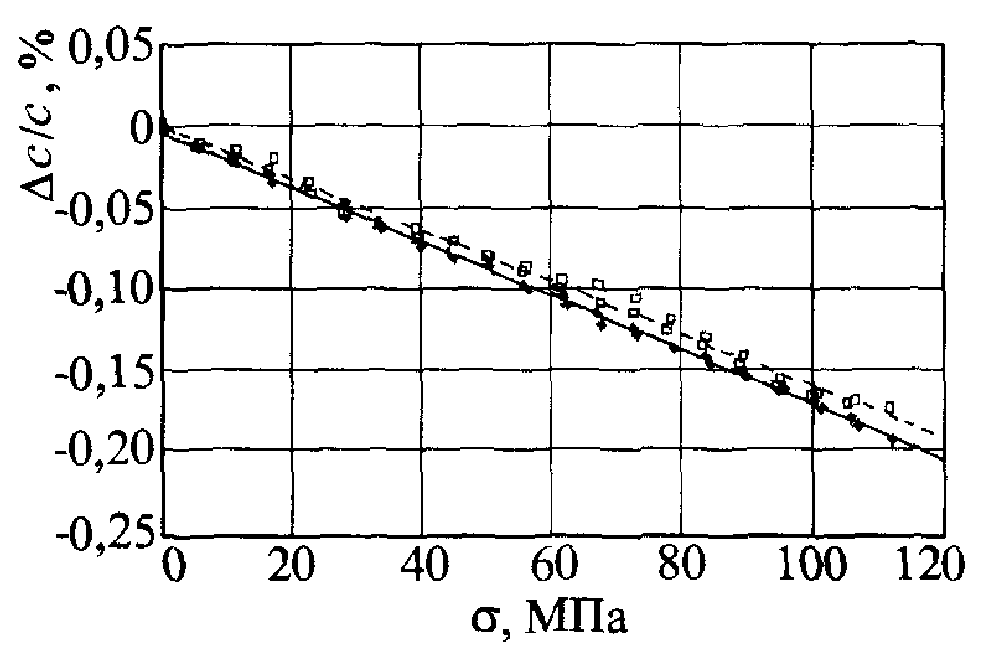
Рис. 2. Относительные изменении скорости под влиянием приложенных напряжений: о – измерения непрерывными волнами методом прохождения; • – импульсные измерения эхо-методом
Теорию акустоупругого взаимодействия с логарифмической формой представления конечной деформации считают перспективной. Изменение скорости под влиянием напряжений очень мало, измерениям сильно мешают температурные эффекты, микронеоднородности, текстура. Схемы выполнявшихся экспериментов показаны на рис. 3.
В качестве образцов использовали алюминево-магниевый сплав, технический алюминиевый сплав и оптическое стекло. Для них измерены акустоупругие коэффициенты. Измерения выполняли импульсным методом с учетом изменения фазы импульса и методом непрерывных волн с наложением модуляции. Точность первого метода была на 10% выше, результаты показаны на (рис. 4).
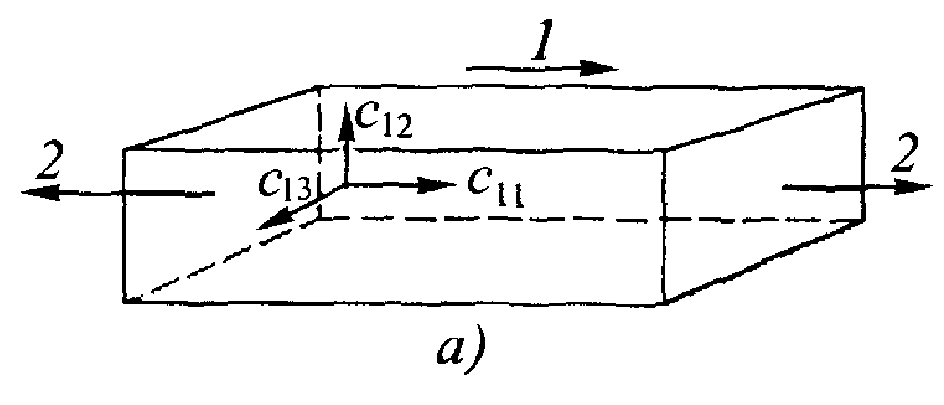
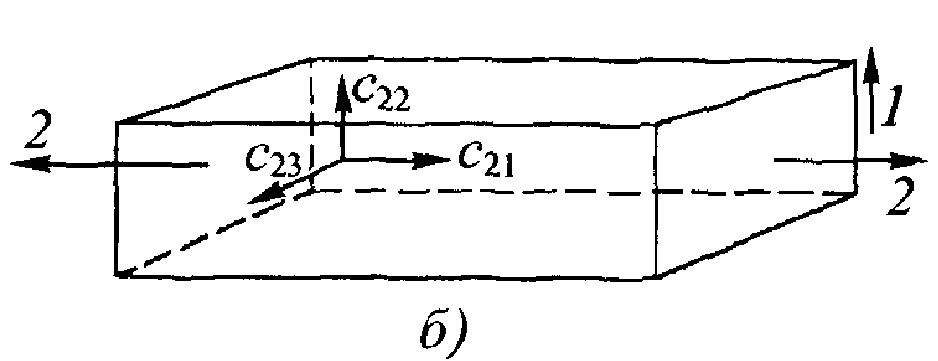
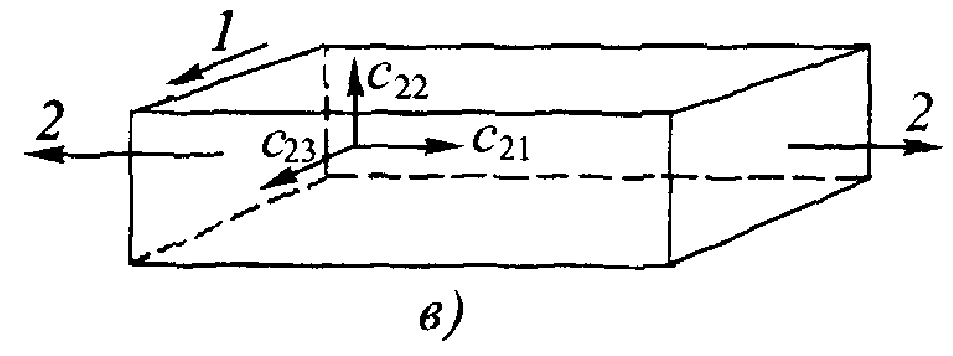
Рис. 3 Направления распространения плоских волн (1) и приложенные напряжения (2)
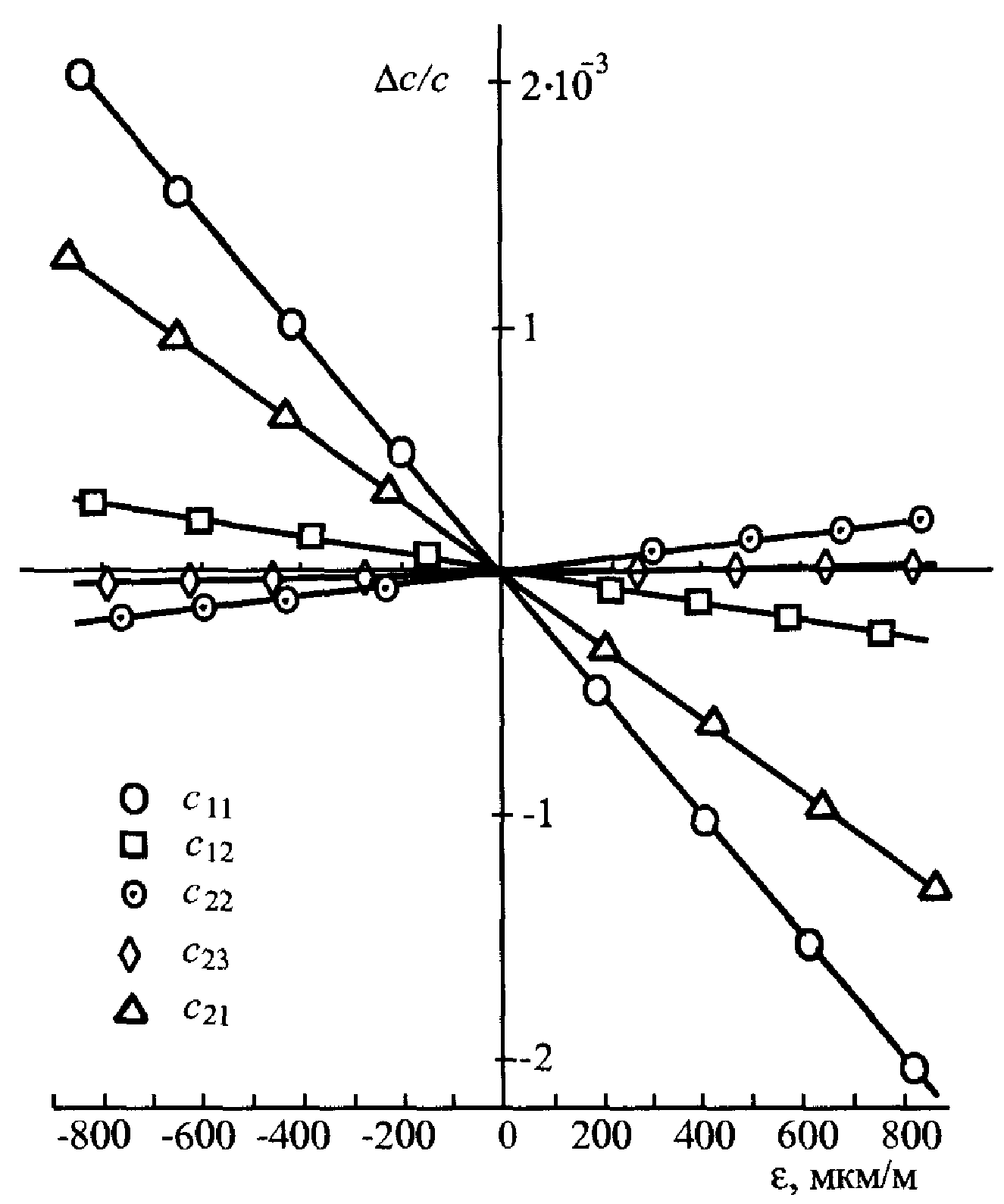
Рис. 4. Относительные изменения скорости дс/с в зависимости от деформаций для вариантов, показанных на рис. 3
Применительно к сталям У8 и ШХI 5 установлено[2], что амплитуда сигнала, возбуждаемого ЭМА-преобразователем, однозначно и практически линейно уменьшается с увеличением микроискажений кристаллической решетки (е), характеризующих микронапряжения. Значение (е) измеряли рентгеноструктурным методом. Уменьшается также резонансная частота колебаний образца, возбуждаемого ЭМА способом, но в значительно меньшей степени.
Обнаруженный эффект дает возможность использовать ЭМА-преобразование для оценки внутренних напряжений при термической обработке углеродистых и слаболегировынных сталей. Это тем более важно, что эффект проявляется при температурах отпуска 200… 600 град. где магнитные и электрические методы контроля неэффективны.
В таблице [6], в которой приведены скорости звука в различных лег сталях в разных состояниях обработки, различия в обеих скоростях звука составляют менее 5%. По влиянию легирующих элементов никакой систематики не усматривается, однако со стояния обработки (отжиг, закалка, термическое улучшение, холодная деформация) сказываются на скорости звука гораздо сильнее, чем легирующие элементы. Как правило, обе скорости звука под влиянием легирующих примесей уменьшаются; обычно это относится и к затуханию звука. Отклоненными от величины с 5,93 км/с для многих практических целей можно пренебречь, но в случае точного измерения толщины стенки это недопустимо. Между тем отклонение поперечной скорости звука на 1% уже приводит к изменению угла преломления на 1,5° при его исходном значении 70°. Следовательно, в критических случаях, например при предельном угле для поверхностных или головных волн, это отклонение нужно учитывать. В таком случае определенную роль играет и уменьшение скорости звука с температурой [1,7].
Термическая или механическая обработка металла приводит к перестройке структуры и появлению микродефектов. Например, в процессе усталостных испытаний изменяется дислокационная структура и накапливаются усталостные повреждения. Следователь но, есть основания ожидать изменений скорости ультразвука при механических нагружениях. Напряжения акустических колебаний, используемые в ультразвуковых измерениях, значительно меньше напряжений трения, поэтому скорость ультразвука может характеризовать перестроение и закрепление дислокаций, возникновение микропор в процессе циклических нагружений. Кривые изменения модуля упругости в процессе усталости представляют собой как бы зеркальное отображение аналогичных кривых внутреннего трения. Как правило, моменту появления микротрещин усталости соответствует одновременное заметное увеличение внутреннего трения и уменьшение модуля упругости. Перераспределение примесных атомов в металле может быть зарегистрировано по скорости ультразвука. Единственной физической характеристикой, которая изменяется (растет) вместе с развитием отпускной хрупкости, является внутреннее трение.
1.2 Усталостные микроповреждения
Металлические конструкции и детали машин в процессе эксплуатации подвергаются действию переменных во времени механических нагрузок, которые могут стать причиной усталостных изменений структуры металла и накопления микродефектов, а следовательно, образования макродефектов, зарождения трещин и разрушения изделия. Для обнаружения микротрещин можно воспользоваться методом, основанным на изменении скорости звука в металле в зависимости от структуры и накопления микродефектов при эксплуатации под воздействием циклически меняющихся нагрузок и температуры. Определяя закономерности кинетики накопления микродефектов в металле при усталостном нагружении, можно установить порог, выше которого формируются опасные для дальнейшей эксплуатации трещины.
Скорость распространения ультразвука измеряли по принципу автоциркуляции импульсов. Исследования зависимости скорости ультразвука от различных параметров усталостных испытаний выполняли [1] на плоских образцах из стали 45. Предварительная термическая обработка образцов состояла из нагрева при 870 гр. в течение 0,5 ч и охлаждения на воздухе. Образцы циклически нагружали в нулевом цикле напряжений (R=0) при двух температурах: 20 и 200 гр. с частотой цикла 5 Гц и уровнями максимальных напряжений цикла 320, 400 и 550 МПа. Число циклов доводили до 10е5.
Рис. 5. Кривая усталости для исследованной стали с коэффициентом асимметрии R=0 (б) (N – количество циклов)
Скорость звука измеряли до и после приложения нагрузок. Часть образцов испытали до разрушения методом малоцикловой усталости. Скорость поверхностных волн измеряли периодически, по мере возрастания числа наработанных циклов N. Согласно (рис. 5) с ростом числа циклов, уровня циклических напряжений и температуры испытаний скорость волн в образце уменьшается.
Выяснилось [11], что практически все структурные изменения, вызванные термической обработкой или деформацией, приводят к малым, но измеримым изменениям СУЗ. Перспективным оказалось применение методики измерения СУЗ для диагностики материала при усталостном нагружении. На рис. 6. представлены данные о изменении СУЗ в ходе усталостного испытания образцов из стали 45 по схеме изгибных колебаний. Аналогичные зависимости были получены и для образцов из рельсовой стали М76. Измерения, проведенные методом автоциркуляции звуковых импульсов на несущей частоте 2.5 МГц с помощью прибора ИСП-12 [1], указывают на качественно одинаковый для всех испытанных образцов вид зависимости скорости поперечных ультразвуковых волн от числа циклов нагружения n. Во всех случаях Vt (n) состоит из трех последовательных стадий снижения СУЗ, но уровень и темп количественных изменений для каждого конкретного образца индивидуален (рис. 6). Характерно, что трехстадийная кинетика изменения некоторых свойств металлов при усталостных испытаниях отмечалась и при использовании других методик.
Рис. 6. Относительное изменение СУЗ в ходе усталостных испытаний образцов из стали 45
Понимание существа процессов, ответственных за подобную стадийность кривых, достигается при микроструктурном анализе металла, подвергнутого усталостным испытаниям. Оказывается, на стадиях 1 и 2 в микроструктуре еще практически незаметны какие-либо изменения, но по мере приближения стадии 3 появляются следы пластической деформации, а сразу после начала крутого спада зависимости Vt (n) отмечены признаки разрушения в виде микротрещин размером ≥ 0.01 мм. Таким образом, есть надежные основания считать, что переход к стадии 3 зависимости СУЗ от числа циклов нагружения сигнализирует о приближении катастрофической стадии усталости и исчерпании ресурса изделия.
Рис. 7. Зависимость изменения СУЗ на 1 цикл испытания от числа циклов
Таким образом, способ измерения скорости распространения ультразвукового импульса позволяет достаточно уверенно диагностировать накопление дефектов при усталостном нагружении и регистрировать переход от стадии нормальной эксплуатации к стадии предразрушения.
Представляется, что подобный вид зависимости Vt (n) может быть полезен для объяснения известного в теории надежности [11] U – образного характера зависимости интенсивности отказов (их числа в единицу времени) от времени эксплуатации t. Действительно, U – образной является показанная на рис. 7. зависимость dVt /dn от n (очевидно, n – t), построенная по данным рис 6: в терминах теории надежности, ее начальный этап соответствует приработочным отказам, стадия медленного спада СУЗ – периоду внезапных отказов (нормальная эксплуатация), а быстрый спад СУЗ сигнализирует о переходе к наиболее опасному периоду износовых отказов.
2. Методы измерения скорости ультразвука
Изменение скорости распространения ультразвука в сплавах в зависимости от их структуры или термической обработки не превышает 3%. Следовательно, для изучения природы связи структуры и скорости распространения звука нужны ультразвуковые методы исследования с точностью лучше 0,05%, причем погрешность устройств для неразрушающего контроля по скорости распространения ультразвука не должна превышать 0,1%.
Резонансный метод, предназначенный для измерения малых изменений скорости распространения ультразвука, является, [9] довольно точным, 0,05% и лучше. Такой метод легко реализуется экспериментально с помощью высокоточных промышленных приборов (генераторов ультразвуковых колебаний, частотомеров, милливольт метров). Поскольку в устройстве, реализующем данный метод, используются нетиповые пьезопреобразователи и образцы, необходимо оценить его точность.
Импульсные и автоциркуляционные методы пригодны как для промышленных, так и для исследовательских целей. Поскольку они могут быть реализованы с использованием поверхностных, например рэлеевских, волн практически исключается влияние на точность измерений формы и размеров образцов, свойственное резонансному методу, за счет жесткой фиксации расстояния между пьезопреобразователями.
2.1 Резонансный метод
Резонансный метод, основанный на смещении амплитудно-частотной характеристики ультразвукового сигнала, прошедшего через образец наиболее распространен в экспериментальных исследованиях [1]. Заключается он в следующем. В образце возбуждают непрерывные ультразвуковые колебания, частоту которых плавно меняют в некотором диапазоне и измеряют зависимость амплитуды прошедшего сигнала от его частоты. При выполнении условия резонанса в исследуемой акустической системе, когда на длине образца укладывается целое число полуволн, амплитуда прошедшего сигнала достигает максимума, что соответствует резонансному пику на амплитудно-частотной характеристике. После термической обработки образца, изменяющей структуру и свойства, наблюдают смещение частот его резонансных пиков и судят об изменении скорости распространения ультразвуковых волн в металле.
На рис. 8 представлена блок-схема экспериментальной установки, реализующей резонансный метод. Непрерывные ультразвуковые колебания в образце возбуждаются пьезопреобразователем (ПЭП) из титаната бария с резонансной частотой 2,5 МГц, питаемым от генератора колебаний. Прошедший через образец акустический сигнал принимается другим аналогичным ПЭП, преобразующим акустические колебания в переменное напряжение той же частоты, измеряемое ламповым милливольтметром. Частота колебаний регистрируется электронно-счетным частотомером.
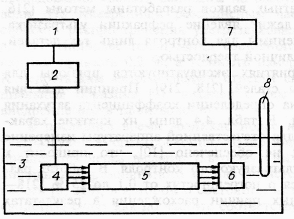
Рис. 8 Блок-схема ультра звуковой резонансной установки: 1 – частотомер Ч3–3З; 2 – генератор колебаний ГЗ (Г4 68); 3 – вода; 4 и б – излучающий и приемный пьезопреобразователи; 5 – цилиндрический образец; 7 – милливольт метр ВЗ-38; 8 – термометр
Для исключения влияния акустического контакта на результаты измерений образец вместе с преобразователями помещается в иммерсионную ванну, заполненную водой. Температура воды и соответственно образца измеряется термометром с точностью 0,1 К. Для акустических исследований резонансным методом наиболее удобны образцы в форме цилиндра диаметром 20–21 и длиной 80–90 мм с шероховатостью поверхности Rmax = 3,2 – 12,5 мкм. Их геометрические размеры можно контролировать с ошибкой 5 мкм микрометром и измерительным микроскопом. Для установления корреляций между резонансными ликами исследуемого образца после различных термообработок амплитудно-частотные зависимости необходимо снимать в диапазоне частот от 2,2 до 2,9 МГц, охватывающем не менее десяти резонансных ликов. Положение экстремальных точек этой зависимости определяется с ошибкой 0,1 кГц. На рис. 9. приведен участок амплитудно-частотной характеристики одного из образцов.

Рис. 9. Участок амплитудно-частотной характеристики одного из образцов
2.2 Импульсный метод
Выше описанный метод применим на практике лишь для контроля деталей, имеющих форму цилиндра с малым разбросом размеров. Кроме того, для резонансного метода сложна обработка результатов измерений. Устранить погрешность, связанную с размерным фактором, и упростить интерпретацию получаемых данных можно с помощью фиксации расстояния, проходимого ультразвуковой волной. А это возможно с применением поверхностных акустических волн, например рэлеевских. Очевидно, наиболее просто метод контроля с помощью этих волн можно реализовать импульсным методом возбуждения ультразвуковых колебаний. Использование импульсного сигнала позволяет применить жесткое, без демпфирующих прокладок, соединение пьезопреобразователей друг с другом и повысить тем самым точность измерений скорости звука по времени прохождения импульсом фиксированного расстояния между излучающим и приемным пьезопреобразователями. Рассмотрим работу импульсного прибора с осциллоскопической индикацией [1], его блок-схему и временные диаграммы. Принцип действия устройства заключается в следующем. Генератор импульсов (ГИ) формирует короткие импульсы амплитудой 35… 100 В, которые подаются на излучающий пьезопреобразователь В1. Ультразвуковой импульс проходит по образцу и через промежуток времени t достигает приемного пьезопреобразователя В2, где преобразуется в электрический импульс, который усиливается усилителем Ус и подается на вертикальный вход (Вх «У’) электронно-лучевого осциллографа ЭО. При постоянной скорости развертки положение импульса на экране зависит от времени прохождения ультразвуком расстояния между пьезопреобразователями и, следовательно, от скорости распространения ультразвука в образце. Запуск ждущей развертки осциллографа происходит не в момент формирования в блоке ГИ импульса, а по истечении промежутка времени t0 несколько меньшего времени t пробега ультразвуковым импульсом расстояния между пьезопреобразователями (рис. 10).
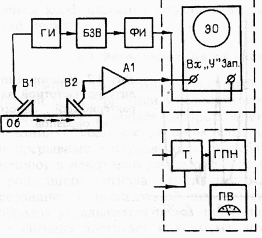
Рис. 10. Блок-схема импульсного прибора (а): ГИ – генератор импульсов; В1 и В2 – излучающий и приемный пьезопреобразователи; Об – образец (изделие); Ус (А1) – усилитель; БЭВ – блок задержки времени; ФИ – формирователь импульсов; Т – Трйггер; ГПН – генератор пилообразного напряжения; ПВ – пиковый (амплитудный) вольтметр, ЭО – электронно-лучевой осциллограф
Временная задержка сигнала осуществляется специальным блоком задержки времени (БЭВ), который запускается импульсом, поступающим с ГИ, и формирует прямоугольный импульс длительности t0. По окончании времени задержки на выходе БЗВ появляется импульс отрицательной полярности, преобразуемый формирователем импульсов (ФИ) в импульс положительной полярности, который подается на электронно-лучевой осциллограф и запускает генератор ждущей развертки. Введение блока задержки времени позволяет существенно увеличить скорость развертки и тем самым повысить точность измерений.
Если обозначить t’ время от момента включения развертки до появления на экране осциллографа импульса от приемного пьезопреобразователя, то время прохождения импульса по образцу

Расстояние х, проходимое лучом на экране осциллографа от момента запуска генератора развертки до прихода импульса с приемного пьезопреобразователя, будет

где V – скорость развертки. Но

где l – расстояние между излучающим и приемным пьезопреобразователями; Vr – скорость распространения ультразвука в образце.
Подставив (4.13) в уравнение (4.12), получим

Очевидно, точность измерения будет тем выше, чем больше х, но это значение не может превышать размеров экрана трубки осциллографа. При заданных размерах экрана большую точность можно получить, увеличивая скорость развертки V при уменьшении времени t’. Применение осциллографа С1–54 дает точность измерений до 0,2%.
2.3 Импульсно-фазовый метод
Импульсно-фазовый способ измерения скорости, обеспечивающий высокую точность измерения [4] основан на компенсации акустического импульса, прошедшего ОК, и электрического импульса, прошедшего через емкостную связь во входную цепь приемника. Генератор высокой частоты 1 (рис. 11 а) вырабатывает непрерывные гармонические колебания, частота которых измеряется электронным частотомером 5. Из них блоком 2 формируются два сдвинутых относительно друг друга радиоимпульса
(рис. 12 6). длительность ч амплитуда У время задержки т и период повторения импульсов задаются модулятором б (рис. 12 а). с помощью пьезоэлектрических излучателя ИП и приемника ПП импульсы проходят как акустические колебания. Приемный тракт прибора 4 состоит из аттенюатора и усилителя. сигналы наблюдают на осциллографе 7.
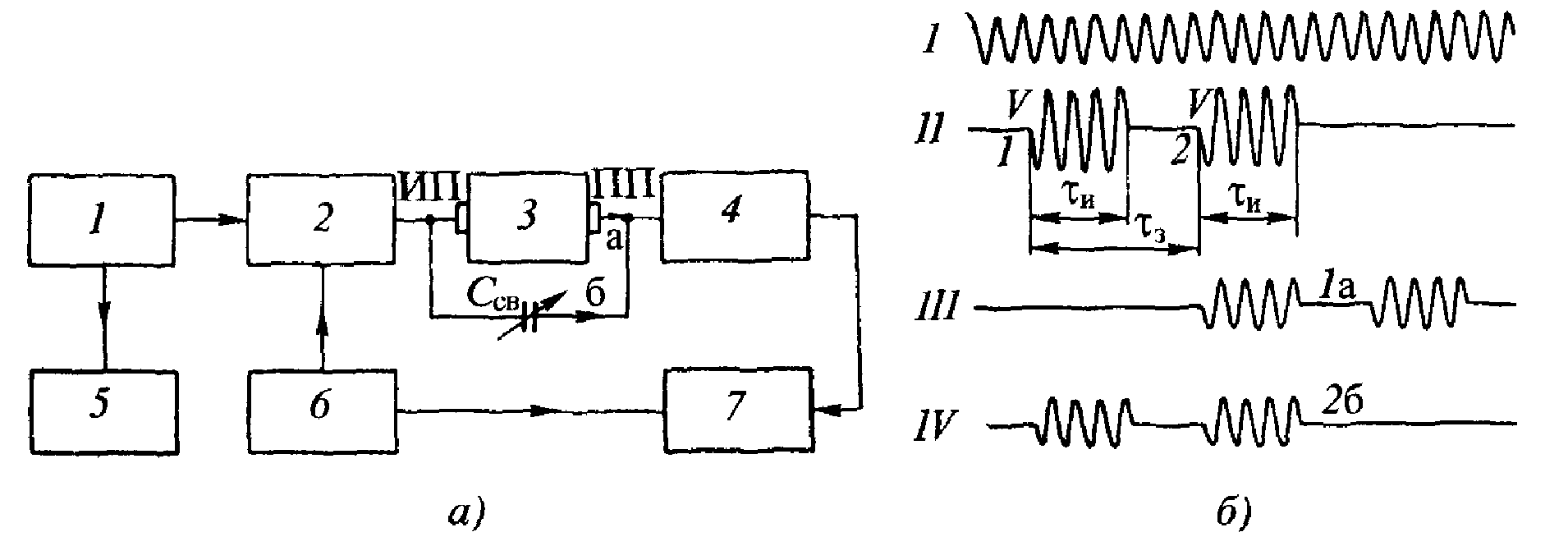
Рис. 12. Измерение скорости импульсно-фазовым способом (а) и электрические колебания, используемые при измерении скорости импульсно-фазовым способом: I – непрерывные гармонические колебания генератора высокой частоты; II импульсы, вырабатываемые модулятором; III – электрические сигналы, создаваемые акустическими импульсами; IУ – электрические сигналы, прошедшие через емкость связи во входную цепь приемника (6)
Измерение скорости производится путем сравнения сигнала 1а, создаваемого акустическим импульсом, и сигнала 26, прошедшего через регулируемую емкость связи. Время задержки регулируют так, чтобы эти импульсы совместились. Регулировкой емкости и уменьшением амплитуды добиваются компенсации им пульсов на экране осциллоскопа. Частота генератора совпадает с частотой преобразователей, и измерения проводят в окрестностях этой частоты. Не приводя алгоритма довольно сложных настроек и измерений, отметим [2], что погрешность измерений прибора типа «Фонон» не более 0,1%, а воспроизводимость результатов – тысячные доли процента.
2.4 Метод автоциркуляции импульса
Импульсный прибор обладает хорошей помехозащищенностью, но для исследовательских целей точность его недостаточна. Кроме того, измерения по сетке на экране осциллографа довольно трудоемки. Расстояние между пьезопреобразователями должно быть не менее 100–150 мм. Однако многие детали не имеют таких площадок для установки пьезопреобразователей. Например, ширина сварочных швов паропроводов 20–30 мм, а для столь малых расстояний применение импульсного метода требует значительного уменьшения длительности вводимого в деталь ультразвукового им пульса, что технически осуществить весьма трудно.
При этом частота импульсов автоциркуляции зависит от времени пробега импульсом расстояния между пьезопреобразователями, а значит (при неизменном расстоянии между преобразователями), – от скорости распространения ультразвука в образце. Рассмотрим подробно вариант автоциркуляционного прибора (рис. 13).
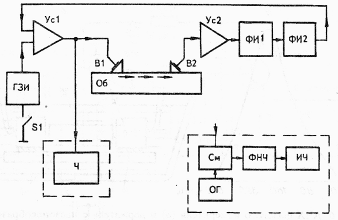
Рис. 13. Блок-схема автоциркуляционного прибора
ГЗИ генератор запускающих импульсов; УсI импульсный усилитель; В1 и В2 – излучающий и приемный пьезопреобразователи; Об – образец (деталь); Ус2 - широкополосный усилитель; ФИI, ФИ2 – формирователь соответственно коротких и прямоугольных импульсов; Ч частотомер ЧЗ-З3; 51 – включатель; См – смеситель: ОГ генератор опорной частоты; ФНЧ – фильтр нижних частот; ИЧ – аналоговый измеритель частот.
Генератор запускающих импульсов ГЗИ подает импульсы на вход импульсного усилителя УсI, с выхода которого импульсы поступают на излучающий пьезопреобразователь В1. Прошедший по образцу ультразвуковой импульс возбуждает приемный пьезопреобразователь В2, электрический сигнал с которого поступает на вход широкополосного усилителя Ус2. Сигнал на выходе Ус2 представляет собой затухающие высокочастотные колебания. Из этого сигнала ФИ 1 формирует короткие импульсы, используемые для запуска ФИ2. Задача блока ФИ2 – формирование прямоугольных импульсов длительностью, несколько большей половины периода следования импульсов, чем устраняется опасность возникновения колебаний на кратных частотах. С выхода ФИ2 импульсы подаются на вход импульсного усилителя УсI, тем самым цепь автоциркуляции замыкается. После появления устойчивых колебаний генератор запускающих импульсов ГЗИ отключается выключателем $1. Частота следования импульсов измеряется цифровым частотомером (ЧЗ-33), вход которого подключается к выходу импульсного усилителя.
Малые габариты и масса, а также незначительное потребление энергии от источника питания дают возможность изготовить переносной вариант прибора, что требует применения малогабаритного частотомера, например аналогового, с использованием метода биений.
Данные испытания [1] не только показали, что прибор устойчиво работает при малых, вплоть до 10… 15 мм, расстояниях между пьезопреобразователями, но и подтвердили его высокую помехоустойчивость и отсутствие акустической связи между пьезопреобразователями.
2.5 Гетеродинный метод
Гетеродинный способ основан на интерференции опорного (гетеродинного) сигнала и первого УЗ-импульса, прошедшего через ОК и буфер-звукопровод. Высокочастотный сигнал генератора 2 (рис. 14) модулируется прямоугольным импульсом от генератора 1 и через аттенюатор 8 поступает на осциллоскоп 10 (синхронизуемый генератором 1) в качестве опорного сигнала.
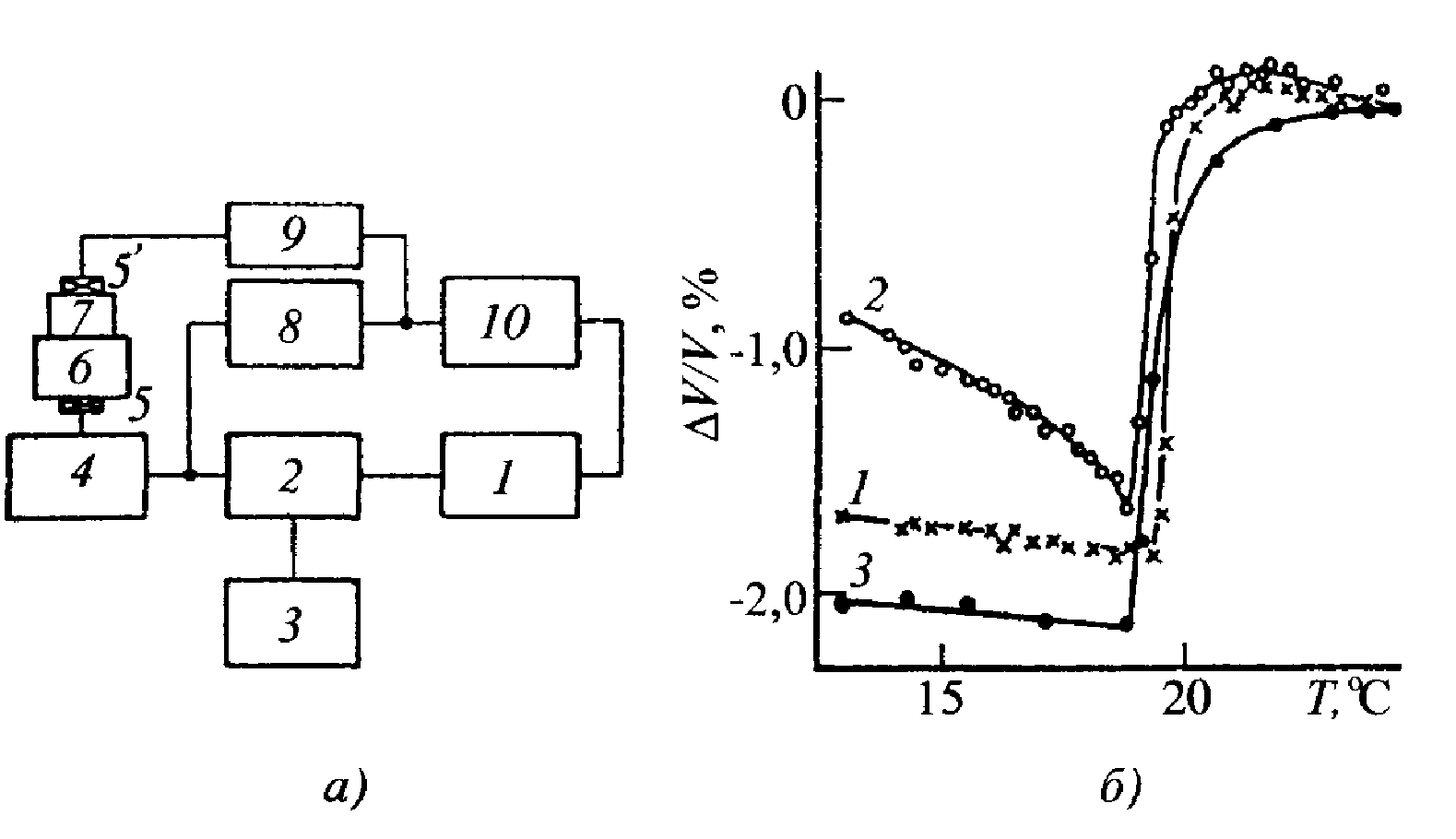
Рис. 14. Измерение скорости гетеродинным способом
Импульс от 2, усиленный в 4, возбуждает пьезопреобразователь 5, проходит через буфер 6, обеспечивающий временную задержку, ОК 7, принимается преобразователем 5’ и через широкополосный усилитель 9 также подается на осциллоскоп 10. Частота колебаний измеряется блоком 3.
Длительность импульса подбирается несколько большей времени его прохождения через буфер и ОК, так, чтобы опорный сигнал перекрывался и интерферировал с прошедшим импульсом. Изменяя частоту генератора 2, можно добиться то го, чтобы оба сигнала находились в противофазе, тогда на экране можно добиться их взаимного гашения.
2.5 Метод измерения углов отражения и преломления ультразвуковых волн на границе двух сред
скорость ультразвук анизотропия напряжение
Особенно удобно измерение критических углов, при которых одна из преломленных или отраженных волн определенного типа распространяется вдоль поверхности. Критический угол определяется в основном соотношением скоростей распространения волн в двух средах. Однако [10] на отражение и преломление упругих волн также влияет затухание ультразвука, а величина критических углов определяется одновременно скоростью продольных и поперечных волн. Это открывает возможность комбинированного измерения скорости и затухания волн различных типов по измерению критических углов и коэффициента отражения.
Этот способ имеет ограниченное применение [3]. Он пригоден только для материалов со сравнительно малым поглощением УЗК, и для проведения эксперимента требуется создать специальные условия (например, погрузить образец в жидкость).
Список литературы
[1] – Муравьев В.В., Зуев Л.Б., Комаров К.Л. «Скорость звука и структура сталей и сплавов», Новосибирск «Наука», 1996
[2] – Неразрушающий контроль, т. 3, Ермолов И.Н., Ланге Ю.В. – Ультразвуковой контроль, М. «Машиностроение», 2004
[3] – Выборнов Б.И. «Ультразвуковая дефектоскопия», изд. второе, перераб. и дополн., М «Металлургия», 1985
[4] – Ермолов И.Н. «Теория и практика ультразвукового контроля», М. «Машиностроение», 1981
[5] – Общий физический практикум, Часть I, МЕХАНИКА
[6] – Крауткремер Й., Крауткремер Г. – Ультразвуковой контроль материалов. Справочник, М. Металлургия, 1991
[7] – Алешин Н.П., Лупачев В.Г. Ультразвуковая дефектоскопия, 1987
[8] – Агранат Б.А. Основы физики и техники ультразвука, М. Высшая школа, 1987
[9] – Муравьев В.В. «Погрешности измерений при ультразвуковой структуроскопии», Дефектоскопия, 1988, №7
[10] – Физическая акустика /под редакцией У. Мэзона.М. Мир.1966, т1, ч.А
[11] – Л.Б. Зуев, В.Я. Целлермаер, В.Е. Громов, В.В. Муравьев Журнал технической физики, 1997, том 67, №9
[12] – www.encotes.ru (По материалам научно-технического семинара «Применение метода акустоупругости для измерения механических напряжений в изделиях и конструкциях», состоявшегося 19 мая 2005 года в рамках IV Международной выставки «NDT -2005»)