Плавный пуск двигателя постоянного тока по системе "Широтно-импульсный преобразователь - двигатель постоянного тока"
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
КАФЕДРА СИСТЕМ АВТОМАТИЧНОГО УПРАВЛІННЯ І
ЕЛЕКТРОПРИВОДА
КУРСОВИЙ ПРОЕКТ
З ДИСЦИПЛІНИ: “ТЕОРІЯ ЕЛЕКТРОПРИВОДА”
НА ТЕМУ: “ПЛАВНИЙ ПУСК ДВИГУНА ПОСТІЙНОГО СТРУМУ
ПО СИСТЕМІ “ ШИРОТНО ІМПУЛЬСНИЙ ПЕРЕТВОРЮВАЧ – ДВИГУН
ПОСТІЙНОГО СТРУМУ“
Розробив:
Керівник:
2002
КАЛЕНДАРНИЙ ПЛАН
|
№ |
Назва етапів курсового проекту |
Строк виконання етапів проекту |
|
1 |
Аналіз технічного завдання і вибір широтно імпульсного перетворювача |
15 жовтня 2002 |
|
2 |
Аналіз функціональної схеми та розробка технічної документації |
30 жовтня 2002 |
|
3 |
Розробка системи управління транзистором та виготовлення печатної плати |
20 листопада 2002 |
|
4 |
Розрахунок схеми заміщення |
30 листопада 2002 |
|
5 |
Побудова статичних, механічних та швидкісних характеристик |
5грудня 2002 |
|
6 |
Вибір силових елементів та розрахунок параметрів схеми |
10 грудня 2002 |
|
7 |
Розрахунок енергетичних характеристик |
25 грудня 2002 |
|
8 |
Математичне моделювання |
10 січня 2003 |
|
9 |
Оформлення проекту |
27 січня 2003 |
Студент _____________
Керівник _____________
“_______”______________________200 р
ПЕРЕЛІК УМОВНИХ ПОЗНАЧЕНЬ
ШИП - широтно імпульсний перетворювач
ДПТ - двигун постійного струму
АД - асинхронний двигун
ИП - імпульсний перетворювач
ЭОМ – електронно-обчислювальна машина
ИДК - вимірювально діагностичний комплекс
ШД - шаговий двигун
ЧРП - частотно регульований привод
КПД - коефіцієнт корисної дії
ГПИ - генератор пилоподібних коливань
ЗАВДАННЯ
на курсовий проект студента
____________________________________
1. Тема роботи Плавний пуск двигуна постійного струму по системі “ Широтно імпульсний перетворювач – двигун постійного струму “. Основна частина – розробка системи плавного пуска двигуна постійного струму на базі мікроконтроллера PIC 16F 877
2. Строк здачі студентом закінченої роботи 28.01.03
3. Вихідні дані до роботи технічні характеристики двигуна, технічні характеристики існуючих систем широтно імпульсних модуляторів
4. Зміст розрахунково – пояснювальної записки аналіз існуючих імпульсних перетворювачів і вибір найбільш оптимальної, розробка технічної документації на стенд, розробка принципової та функціональної схем, вибір силових елементів.
5. Дата видачі завдання жовтня 200 р
СОДЕРЖАНИЕ
КАЛЕНДАРНИЙ ПЛАН 2
ПЕРЕЛІК УМОВНИХ ПОЗНАЧЕНЬ 3
ЗАВДАННЯ 4
Введение 6
1. Преимущества и недостатки системы ШИП – ДПТ 8
1.1 Импульсные преобразователи постоянного напряжения (общие сведения) 8
1.2 Анализ существующих импульсных преобразователей 8
2. Функциональная схема лабораторного стенда 11
3. Разработка технической документации на лабораторный стенд системы ШИП – ДПТ 13
3.1 Общий вид лабораторного стенда 13
3.2 Принципиальная схема стенда после доработки 15
3.3 Перечень функциональных возможностей лабораторного стенда 16
3.4 Система управления на базе микроконтроллера PIC 16F 877 17
4. Расчет схемы замещения 24
5. Статические характеристики системы ШИП – ДПТ 26
6. Выбор силовых элементов 31
6.1 Выбор силового трансформатора 31
6.2 Выбор силового транзистора 32
6.3 Выбор обратного диода 33
7. Расчет преобразователя 35
8. Расчет энергетических характеристик 42
9. Математическая модель системы ШИП – ДПТ 45
ВЫВОД 50
Введение
Сохранение электрической энергии становится важной частью общей тенденции по защите окружающей среды. Электродвигатели, приводящие в действие системы в быту и на производстве, потребляют значительную часть производимой энергии. Большинство этих двигателей работают в нерегулируемом режиме и, следовательно, с низкой эффективностью. Недавний прогресс в полупроводниковой индустрии, особенно в силовой электронике и микроконтроллерах, сделали приводы с регулированием скорости более практичными и значительно менее дорогими. Сегодня приводы с регулировкой скорости требуются не только в высокопрофессиональных и мощных промышленных применениях, таких как обрабатывающие машины или подъемные краны, но все больше и больше в бытовой технике, например, в стиральных машинах, компрессорах, небольших насосах, кондиционерах воздуха и т.п. Эти приводы, управляемые по развитым алгоритмам с помощью микроконтроллеров, имеют ряд преимуществ:
увеличение энергетической эффективности системы (регулирование скорости снижает потери мощности в двигателях)
усовершенствование функционирования (цифровое управление может добавить такие свойства, как интеллектуальные замкнутые контуры, изменение частотных свойств, диапазона контролируемых неисправностей и способность к взаимодействию с другими системами)
упрощение электромеханического преобразования энергии (регулируемые приводы позволяют устранить необходимость в трансмиссиях, коробках передач, редукторах) простота обновления программного обеспечения системы на базе микроконтроллеров с флэш-памятью могут быстро изменять при необходимости увеличивается. Основным условием их использования является сохранение общей стоимости системы в обоснованных границах. Для ряда систем, особенно в быту, общая стоимость должна быть эквивалентна стоимости нерегулируемого варианта.
1. Преимущества и недостатки системы ШИП – ДПТ
1.1 Импульсные преобразователи постоянного напряжения (общие сведения)
Изменение величины напряжения потребителя посредством импульсных преобразователей (ИП) называют импульсным регулированием.
С помощью импульсного преобразователя источник напряжения периодически подключается к нагрузке. В результате на выходе преобразователя формируются импульсы напряжения. Регулирование напряжения на нагрузке можно осуществить тремя способами:
изменением интервала проводимости ключа при постоянной частоте переключения (широтно-импульсный)
изменением частоты переключения при постоянном интервале проводимости ключа (частотно-импульсный)
изменением частоты переключения и интервала проводимости ключа (время-импульсный)
При этом регулируется относительное время проводимости ключа, что приводит к плавному изменению среднего значения напряжения на нагрузке (в нашем случае на якоре ДПТ)
1.2 Анализ существующих импульсных преобразователей
Схема ШИП с параллельной емкостной коммутацией изображена на рисунке 1.1.
Рисунок 1.1. ШИП с параллельной емкостной коммутацией
Недостатком ШИП с параллельной емкостной коммутацией является то, что в процессе переключения напряжение на нагрузке достигает удвоенных значений питающего напряжения. Также недостатком является сложность настройки резонансного контура с конденсатором ‘C’ и дросселем ‘Др’.
На рисунке 1.2 изображена схема ШИП с дополнительным коммутирующим тиристором и линейным дросселем в узле коммутации.

Недостатком схемы является связь контура коммутации с цепью нагрузки. Эта особенность затрудняет коммутацию в режимах малых нагрузок и делает невозможной работу устройства на холостом ходу.
На рисунке 1.3 изображена схема нереверсивного ИП с последовательным ключевым элементом.

Рисунок 1.3. Нереверсивный ШИП
Данная схема является наиболее приемлемой для нашей цели, так как она отличается малым количеством элементов, простотой конструкции, достаточно высоким быстродействием и надежностью.
Принцип действия:
Когда транзистор VT отперт от источника питания потребляется энергия. При запирании транзистора VT ток нагрузки за счет Э.Д.С. самоиндукции сохраняет свое прежнее направление, замыкаясь через обратный диод VD. В связи с тем что источник питания, как правило, обладает индуктивностью, для защиты транзистора от перенапряжений, возникающих при разрывах цепи питания, на входе ИП ставится фильтр нижних частот, выходным звеном которого является конденсатор Свх.
2. Функциональная схема лабораторного стенда
Функциональная схема уже существующего лабораторного стенда представлена на рисунке 2.1

Рисунок 2.1 Функциональная схема стенда
На функциональной схеме изображены основные элементы стенда и функциональные взаимодействия между ними.
Основным элементом стенда есть преобразователь частоты ACS 300. Через него питание подается на асинхронный двигатель с короткозамкнутым ротором М1 – АОЛ2-21-4. Стенд предусматривает возможность работы асинхронного режим динамического торможения. Также предусмотрена возможность контроля скорости асинхронного двигателя, токи и напряжения как АД так и ДПТ.
В силовой цепи АД расположены трехфазный датчик тока и трехфазный датчик напряжения, данные с которых подаются через блок связи на ЭОМ. Блок связи и ЭОМ образуют измерительно-диагностический комплекс (ИДК). На ИДК подаются сигналы и с других датчиков и контролирующих элементов
3. Разработка технической документации на лабораторный стенд системы ШИП – ДПТ
3.1 Общий вид лабораторного стенда
Внешний вид проектируемого стенда показан на рисунке 3.1

Ручка нагрузочного резистора
Кнопка SB2 “Стоп АД”
Кнопка SB1 “Пуск АД”
Автомат QF1 (подключение стенда к сети питания)
Функциональная схема ПЧ-АД
Амперметр А1 (контроль тока сети питания)
Амперметр А2 (контроль тока статора АД)
Преобразователь частоты ABB ACS 300
Амперметр А3 (контроль тока якоря ДПТ)
Вольтметр V1 (контроль напряжения статора АД)
Автомат QF2 (подключение нагрузочной машины)
Амперметр А1 (контроль тока ДПТ)
Функциональная схема ШД
Вольтметр V1 (контроль напряжения ДПТ)
Нагрузочный ДПТ
Шаговый двигатель
Амперметр А2 (контроль тока АД)
Частотомер PF1 (контроль частоты на КД)
Переключатель SB1 (реверс ДПТ)
Переключатель SB2 (реверс ШД)
Ручка переменного резистора R1 (регулирование частоты коммутации)
Автомат QF1 (подключение стенда к сети питания)
Переключатель SB3 (включение/выключение ШД)
Переключатель SB4 (выбор источника задания плавно/дискретно)
Ручка ЛАТРа ATV1 (смена напряжения ДПТ)
Переключатель SB5 (выбор режима работы ШД
3.2 Принципиальная схема стенда после доработки
Доработкой схемы будет включение в ее состав силового транзистора, системы управления на микроконтроллере (рисунок 3.3) питающейся от трансформатора ТР2 через блок питания (БП1) и драйвера управления транзистором (рисунок 3.4) питающегося через блок питания (БП1).
В доработанном стенде ДПТ может выполнять роль не только нагрузочной машины но и являться исследуемым объектом, поэтому для его питания от постоянного тока в схему включается выпрямитель.
Общий вид доработанной схемы представлен на рисунке 3.2
Тр1-силовой трансформатор
К1-контактор, включение режима ШИП-ДПТ
К2-контактор, включение режима динамического торможения
SB1 и SB2 кнопки включения соответствующего режима.
SB3-сброс режимов (СТОП)
Rдт-нагрузочный резистор для режима динамического торможения (вмонтирован в стенде)
Р1-реле защиты VT1.

3.3 Перечень функциональных возможностей лабораторного стенда
Существующие возможности:
А) Исследование системы ЧРП – АД только при линейной нагрузке на валу
Б) динамика системы ЧРП-АД
В) статический характер ЧРП-АД
Г) исследование режимов работы преобразователя при нелинейном характере нагрузки
Новые возможности:
А) реализация режимов плавного пуска ДПТ
Б) электропривод по системе ШИП-ДПТ
В) режим динамического торможения
Г) имитация различных видов нагрузки для системы ЧРП-АД
3.4 Система управления на базе микроконтроллера PIC 16F 877
Основой системы управления является однокристальный микроконтроллер PIC 16F877. Широкий набор периферийных устройств входящих в состав серии микроконтроллеров семейства PIC 16X позволяет строить современные системы управления с высокими показателями.
PIC 16FX – семейство дешевых, высокоэффективных, 8-разрядных КМОП микроконтроллеров со встроенным аналого-цифровым (analog-to-digital) преобразователем.
Среди микроконтроллеров PIC 16F877 занимает среднее положение. Все микроконтроллеры PIC 16FX используют RISC структуру процессорного ядра. Семейство микроконтроллеров PIC 16F877 имеет расширенные возможности ядра, стек глубиной 8 уровней и множество внутренних и внешних прерываний. Гарвардская архитектура с отдельными именами команд и данных позволяет одновременно передавать 16 разрядные команды и 8 разрядные данные. Двухкомандный конвейер позволяет выполнять все команды за один машинный цикл, кроме команд ветвления программы, которые выполняются за два цикла.
Уменьшенная система команд (всего 35 команд). Высокая эффективность достигается использованием новшеств архитектуры и большого набора дополнительных регистров.
Микроконтроллер PIC 16F877 по сравнению с другими 8 разрядными микроконтроллерами такого же класса позволяет уменьшить программу 2: 1 и увеличить быстродействие 4:
1.
устройство PIC 16F877 имеет 368 байт памяти данных. Кроме того, PIC имеет 13 контактов ввода/вывода (I/O), периферийные устройства: три таймера/счетчика, два модуля сравнения и шин, два последовательных порта и 8 разрядный параллельный порт.
двухпроводная шина (I2C). Универсальный синхронно-асинхронный приемопередатчик (USART) также известный как последовательный интерфейс связи (SCI), а также быстродействующий 8 разрядный A/D преобразователь идеально подходит для дешевых приложений, требующих аналоговый интерфейс.
Для того чтобы уменьшить количество внешних компонентов и таким образом уменьшить стоимость, повысить надежность системы и снизить потребление, микроконтроллер PIC 16F877 имеет дополнительные возможности. Имеются 4 режима генератора: RC генератор на одном контакте обеспечивает дешевое решение, LP генератор обеспечивает минимальное потребление, XT генератор – стандартное решение и HS генератор для высокочастотных приложений. Режим останова позволяет резко уменьшить потребление. Пробуждение из режима останова может осуществляться при помощи внешних и внутренних прерываний и сбросов.
Высоконадежный сторожевой таймер со своим RC генератором обеспечивает защиту от зацикливания программы. Малогабаритные корпуса микроконтроллеров задают семейство PIC 16FX совершенными для всех приложений без ограничений. Низкая цена, малая потребляемая мощность, высокая эффективность, устройство при использовании и гибкость I/O делает PIC универсальным даже в областях, где использование микроконтроллеров прежде не рассматривалось (например, функции таймера, последовательная связь, сбор и сравнение данных, функции ШИМ и приложения с компрессором).
Таблица 3.1 Основные электрические параметры
|
Диапазон рабочих температур |
-55 ÷ +125оС |
|
Напряжение VDD относительно VSS |
-0.3 ÷ +7.5 В |
|
Напряжение на MCLR |
0 ÷ +14 В |
|
Напряжение на RA4 |
0 ÷ +14 В |
|
Напряжение на любом контакте (за исключением UDD, MCLR и RA4) |
-0.3 ÷ +7.5 В |
|
Общая рассеиваемая мощность |
10 Вт |
|
Максимальный ток через VSS |
300 mA |
|
Максимальный ток через VDD |
250 mA |
|
Ограничение входного тока I1k (U1<0 или U1>UDD) |
± 20 mA |
|
Ограничение выходного тока I0k (U0<0 или U0>UDD) |
± 20 mA |
|
Максимальный выходной вытекающий ток по любому контакту I/O |
25 mA |
|
Максимальный выходной вытекающий суммарный ток портов А, В и Е |
200 mA |
|
Максимальный выходной втекающий суммарный ток портов А, В и Е |
200 mA |
|
Максимальный вытекающий суммарный ток портов C и D |
200 mA |
|
Максимальный выходной втекающий ток портов C и D |
200 mA |
Принципиальная схема системы управления представлена на рисунке 3.3 Для реализации функций управления ШИП используются следующие модули микроконтроллера:
A/D преобразователь для контроля выходного тока и напряжения, скорости двигателя постоянного тока
компаратор (накопитель) ШИМ (ССP) для управления выходным силовым ключом в силовой схеме
таймер 2 для быстрого программного регулирования
I/O порты ввода – вывода.
Микроконтроллеры PIC имеют четыре различных режима генератора. Для того чтобы выбрать один из этих четырех режимов необходимо соответственно запрограммировать два бита конфигурации (OSC1: OSC2)
LP низкочастотный кварцевый генератор;
XT среднечастотный кварцевый генератор;
HS высокочастотный кварцевый генератор;
RC резистивно-емкостной генератор.
С учетом того, что требуется точное тактирование модуля ШИМ PIC контроллера (для задания частоты и скважности) наиболее применимым вариантом является использование внешнего кварцевого генератора (режим HS). В режиме HS к выводам OSC1 и OSC2 подключают кварцевый генератор. Для PIC 16F877 используют кристалл с параллельным срезом. Применение других кристаллов может привести к получению частоты, не соответствующей спецификации кристалла. В режиме HS устройство работает от внешнего тактового сигнала со входа OSC1 (рисунок 4.3)
В качестве внешнего кварца выбираем резонатор ZQ1 20 Мгц. Значения внешних конденсаторов С1 и С2 выбираем из таблицы 1 согласно рекомендациям фирмы производителя “Microchip”
Таблица 3.2. Параметры конденсаторов
|
Режим |
Частота |
OSC1 |
OSC2 |
|
LP |
32 кГц |
33 пФ |
33 пФ |
|
200 кГц |
15 пФ |
15 пФ |
|
|
XT |
200 кГц |
47-16 пФ |
47-68 пФ |
|
1 МГц |
15 пФ |
15 пФ |
|
|
4 МГц |
15 пФ |
15 пФ |
|
|
HS |
4 МГц |
15 пФ |
15 пФ |
|
8 МГц |
15-33 пФ |
15-33 пФ |
|
|
20 МГц |
15-33 пФ |
15-33 пФ |
Внешний сброс контроллера, по контакту MCLR, при помощи внешних компонентов предназначен для разрешения работы устройства когда эксплуатационные параметры станут в норме. Если это условие не выполняется, устройство должно быть задержано в сбросе, пока эксплуатационные режимы не установятся.
Согласно руководству применения микроконтроллеров PIC для этих целей используется внешняя RC цепочка на входе контакта MCLR. Значение RC цепочки должны находится в пределах R<40 кОм, C – 0.001÷1 мкФ (согласно руководству применения PIC контроллеров.
С учетом этого принимаем: R1 => МЛТ – 0.125 22 кОм ± 10%
C5 => 0.1 мкФ
Резистор R2 ограничивает входной ток, при начальном заряде конденсатора, контакта MCLR. Значение R2 принимаем: R2 => МЛТ – 0.125 680 Ом ± 10%
Задание установок коэффициентов регулирования осуществляется построечными резисторами R1 – R3, которые выполняют роль делителей напряжения. Снимаемое напряжения с переменных движков резисторов подается на аналоговые входы контроллера RA1 – RA3. Сигнал обратной связи по току Iос подключен на вход RA0. Неиспользуемые аналоговые входы АЦП RA4 – RA5 закорочены на корпус, с целью уменьшения энергопотребления и снижения уровня наводок помех от внешних цепей на АЦП контроллера.
Неиспользуемый порт RE запрограммирован на вход линии и подключены на общий корпус, для снижения общего энергопотребления микросхемой. Ввод информации пользователем осуществляется через клавиатуру, состоящую из 4 кнопок SB1 – SB4.
Выбор контактов RB4 - RB7 (к которым подключена клавиатура) обусловлена тем, что по входам RB4 – RB7 в PIC контроллере существует встроенная опция формирования прерывания при изменении уровня на данных линиях ввода. Входные линии подтянуты к высокому уровню через резисторы R12 – R15. Значения резисторов принимаем следующие: МЛТ 0.125 10кОм ±10% с учетом этого высокий уровень является не активным, что соответствует не нажатой ни одной клавиши. В случае нажатия какой-либо кнопки SB1 – SB4 входной уровень линий RB4 – RB7 изменится на низкий, что будет причиной возникновения прерывания подпрограммы обработки клавиатуры. Дребезг контактов клавиатуры аппаратно не осуществляется, и реализуется программным способом.
Для визуального отображения информации пользователю в состав системы управления входит светодиодная матрица индикации VD6 – VD9. С учетом того, что нагрузочная способность по току линий вывода PIC контроллера должна быть не более 20 mA, выбираем светодиоды АЛ 307, с током свечения 10 mA.
Ограничительные резисторы принимаем следующего значения: МЛТ 0.125
Сигнал ШИМ формируется на контактe RC2 и подается через ограничительный резистор R4 на силовой ключ преобразователя.
Питание микросхемы осуществляется от стабилизирующего источника “+5” В и подается на ножки VDD и общий вывод VSS. Конденсатор С3 выполняет роль фильтра высокочастотных помех, и находится в непосредственной близи от ножек питания микроконтроллера.

Рисунок 3.3 Система управления транзистором
3.5 Принципиальная электрическая схема драйвера управления
Рисунок 3.4 Драйвер управления
4. Расчет схемы замещения
Упрощенная эквивалентная схема замещения двигателя постоянного тока приведена на рисунке 4.1

Рисунок 4.1 Схема замещения двигателя
Определим номинальную скорость вращения якоря исходя из каталожного значения частоты вращения
 ;
(4.1)
;
(4.1)
 рад/с;
рад/с;
Активное сопротивление якорной обмотки:
 ;
(4.2)
;
(4.2)
где
 для двигателей постоянного тока
независимого возбуждения;
для двигателей постоянного тока
независимого возбуждения;
 для двигателей постоянного тока
смешанного возбуждения.
для двигателей постоянного тока
смешанного возбуждения.
 для двигателей постоянного тока
последовательного возбуждения.
для двигателей постоянного тока
последовательного возбуждения.
Принимаем

Индуктивность обмотки якоря определяется в соответствии с формулой Уманского:
 ;
(4.3)
;
(4.3)
где k = 0.2 – 0.25 для компенсированных машин;
k = 0.5 – 0.6 для некомпенсированных машин.
Принимаем k = 0.25
 Гн;
Гн;
Момент инерции для машины постоянного тока составляет
 кг
м2(4.4)
кг
м2(4.4)
 ;
;
Номинальный коэффициент потока
 ;
(4.5)
;
(4.5)

 ;
;
Таблица 4.1 Параметры двигателя
|
Параметры двигателя |
|
|
Тип двигателя |
ДПУ 240 1100 3 Д4109 |
|
Номинальная мощность |
|
|
Номинальное напряжение |
Uн = 110 В |
|
Номинальный ток |
IН = 12.5 А |
|
Номинальный момент |
MН = 3.5 н м |
|
Номинальная частота вращения якоря |
nн = 3000 об/мин |
|
Активное сопротивление якорной обмотки |
|
|
Индуктивность обмотки якоря |
|
|
Момент инерции |
|
 кВт
кВт Ом
Ом Гн
Гн
5. Статические характеристики системы ШИП – ДПТ
В проектируемом лабораторном стенде
напряжение подаваемое на якорь двигателя
подается импульсным методом, когда
двигатель периодически подключается
к источнику питания и отключается от
него. При широтно-импульсном регулировании
период коммутации “Tk”
остается постоянным, а изменяется время
“t0” замкнутого состояния
ключа скважность

Среднее значение напряжения на якоре при ШИМ равно:
 ;
(5.1)
;
(5.1)
Уравнение механической характеристики двигателя для средних значений угловой скорости и момента имеет вид:
 ;
(5.2)
;
(5.2)
Механическая характеристика будет
представлять собой семейство характеристик
при изменяющемся значении скважности
 .
Зависимости
.
Зависимости
 при разных значениях скважности сведены
в таблицах.
при разных значениях скважности сведены
в таблицах.
Таблица 5.1 Зависимость
при

|
|
0 |
50 |
100 |
150 |
200 |
250 |
314 |
|
М |
13.5 |
11.84 |
10.22 |
8.6 |
6.99 |
5.32 |
3.4 |
Таблица 5.3 Зависимость
при

|
|
0 |
50 |
100 |
130 |
180 |
220 |
250 |
|
М |
8.07 |
6.45 |
4.84 |
3.84 |
2.25 |
0.96 |
0 |
Таблица 5.4 Зависимость
при

|
|
0 |
40 |
70 |
100 |
120 |
140 |
166 |
|
М |
5.38 |
4.1 |
3.11 |
2.15 |
1.5 |
0.86 |
0 |
Таблица 5.5 Зависимость
при

|
|
0 |
15 |
30 |
50 |
60 |
70 |
83 |
|
М |
2.69 |
2.2 |
1.72 |
1.07 |
0.75 |
0.43 |
0 |

Рисунок 5.1 Механические характеристики
Уравнение скоростной характеристики двигателя для средних значений угловой скорости и момента имеет вид:
 ;
(5.3)
;
(5.3)
Скоростная характеристика будет
представлять собой семейство характеристик
при изменяющемся значении скважности
.
Зависимости
 при разных значениях скважности сведены
в таблицах.
при разных значениях скважности сведены
в таблицах.
Таблица 5.6 Зависимость
при
|
|
0 |
60 |
120 |
180 |
240 |
300 |
440 |
|
I |
54 |
46.8 |
39.5 |
32 |
24.8 |
17.5 |
0 |
Таблица 5.7 Зависимость
при

|
|
0 |
90 |
135 |
180 |
225 |
270 |
354 |
|
I |
43.3 |
32.4 |
27 |
21.3 |
15.8 |
10.3 |
0 |
Таблица 5.8 Зависимость
при
|
|
0 |
66 |
99 |
132 |
165 |
199 |
265 |
|
I |
32.5 |
24.4 |
20.4 |
16.4 |
12.3 |
8.2 |
0 |
Таблица 5.9 Зависимость
при
|
|
0 |
25 |
50 |
75 |
100 |
125 |
177 |
|
I |
21.7 |
18.6 |
15.6 |
12.5 |
9.4 |
6.4 |
0 |
Таблица 5.10 Зависимость
при
|
|
0 |
13 |
26 |
39 |
52 |
65 |
88 |
|
I |
10.8 |
9.24 |
7.6 |
6 |
4.4 |
2.88 |
0 |
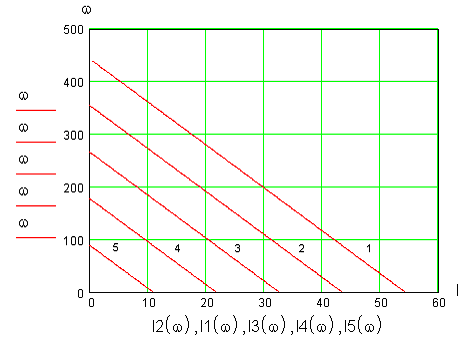
Рисунок 5.2 Скоростные характеристики
Уравнение для механических и скоростных характеристик в относительных единицах имеет вид:
 ;
(5.4)
;
(5.4)
где
 относительная скорость двигателя;
относительная скорость двигателя;
 относительный ток якоря;
относительный ток якоря;
Графически механические характеристики
системы ШИП – ДПТ представляют собой
семейство прямых с постоянным углом
наклона к оси абсцисс, пересекающих ось
ординат при
 ,
где прямые 1, 2, 3, 4 и 5 соответствуют
характеристикам при значениях скважностей
1, 0.8, 0.6, 0.4 и 0.2 соответственно.
,
где прямые 1, 2, 3, 4 и 5 соответствуют
характеристикам при значениях скважностей
1, 0.8, 0.6, 0.4 и 0.2 соответственно.

Рисунок 5.3 Скоростные характеристики в относительных единица
6. Выбор силовых элементов
6.1 Выбор силового трансформатора
При выборе силового трансформатора необходимо учесть величину напряжения имеющегося в аудитории, а также требуемую величину напряжения на двигателе с учетом коэффициента передачи однофазного выпрямителя. В аудитории 2411 электрическая сеть выдает линейное напряжение 220 В, которое и должно быть номинальным напряжением первичной обмотки выбираемого трансформатора. С учетом коэффициента передачи выпрямителя по напряжению, для данного типа выпрямителей равного Ku = 0.9, напряжение на вторичной обмотке должно быть не менее 122 В.
Также должна быть учтена и мощность двигателя, которая не должна превышать мощности трансформатора. Исходя из этих условий выбираем наиболее близкий по параметрам силовой трансформатор ОСМ - 0.16
Таблица 6.1. Параметры трансформатора
|
Номинальное напряжение первичной обмотки |
U1 = 220 В |
|
Номинальное напряжение вторичной обмотки |
U2= 130 В |
|
Ток короткого замыкания |
Iкз = 23 А |
|
Номинальная мощность |
Pном = 160 ВА |
Выбор транзистора и обратного диода рассмотрен на упрощенной схеме лабораторного стенда представленной на рисунке 6.1
Рисунок 6.1 Упрощенная схема лабораторного стенда.
Принцип действия:
Когда транзистор VT отперт от источника питания потребляется энергия. При запирании транзистора VT ток нагрузки за счет Э.Д.С. самоиндукции сохраняет свое прежнее направление, замыкаясь через обратный диод VD.
6.2 Выбор силового транзистора
Выбор транзистора производим по максимально возможному току протекающему через него, а также поскольку наш транзистор работает в ключевом режиме то при выборе также необходимо учесть допустимую частоту коммутации ключа.
Определим постоянную времени двигателя.
 ;
(6.1)
;
(6.1)
 ;
;
превышать величины эквивалентной постоянной времени двигателя и составляет 1/5 – 1/7 часть ее значения.
 ;
(6.2)
;
(6.2)
 ;
;
Определим максимально возможный ток протекающий через якорную цепь двигателя. Им является ток короткого замыкания цепи который определяется из соотношения:
 ;
(6.3)
;
(6.3)
 A;
A;
В соответствии с полученными параметрами периода коммутации и максимального тока по каталожным данным выбираем тип транзистора IGBT IRG4PC 40UD
Таблица 6.2 Параметры транзистора
|
Максимально допустимое напряжение |
Umax = 600 В |
|
Максимально допустимый ток |
Imax = 40 А |
|
Максимальная частота переключения |
fmax = 40 кГц |
|
Диапазон рабочих температур |
T = - 55 ÷ +150 oC |
6.3 Выбор обратного диода
Выбор диода производим из условия что ток через него будет протекать лишь в случае запертого состояния транзистора. В случае вышеприведенной схемы выбор можно произвести по нескольким параметрам: максимальному току, максимальному напряжению и времени проводимости:
При выборе диода по максимальному напряжению необходимо учесть момент когда это напряжение достигнет максимального значения. Максимальным напряжением на диоде будет величина максимальной ЭДС двигателя которая достигнет своего наибольшего значения при номинальной величине угловой скорости, и определяется из выражения:
 ;
(6.4)
;
(6.4)
 В;
В;
Максимальный ток который может замкнуться на диод определяется из выражения:
 ;
(6.4)
;
(6.4)
 А;
А;
При выборе диода по времени проводимости
необходимо определить максимальное
время проводимости. Максимальным
временем проводимости диода будут
промежутки времени когда транзистор
формирует импульсы минимальной
скважности. То есть с уверенностью можно
сказать что время проводимости диода
не может быть больше периода коммутации
ключа
 с.,
с.,
Таблица 6.3 Параметры обратного диода
|
Максимально допустимый прямой импульсный ток |
Iи. пр. max= 60 А |
|
Максимально допустимое обратное импульсное напряжение |
Uи. обр= 400 В |
|
Максимальная частота |
f = 50 кГц |
7. Расчет преобразователя
При работе нереверсивного ШИП на якорь двигателя постоянного тока возможны два режима: непрерывных токов якоря и прерывистых токов якоря. Режим прерывистых токов якоря может возникнуть при весьма малых нагрузках, когда период переключения рабочего вентиля соизмерим с постоянной времени цепи нагрузки. Во избежание прерывистых токов для данной системы частота коммутации ключом ранее была принята равной 1/5 части эквивалентной постоянной времени двигателя. Исходя из этого, считаем, что в исследуемой системе исключено появление прерывистых токов естественным путем, и в дальнейшем этот режим работы рассмотрен не будет.
Основным режимом является режим
непрерывных токов. Учитывая параметры
силового трансформатора можно определить
относительное время проводимости ключа,
при котором среднее напряжение на якоре
двигателя было бы равно номинальному
 В.
В.
Так как со вторичной обмотки трансформатора
снимаемое напряжение равно
 В,
и с учетом коэффициента передачи
выпрямителя по напряжению равного
В,
и с учетом коэффициента передачи
выпрямителя по напряжению равного
 ,
то напряжение на преобразователе будет
равно:
,
то напряжение на преобразователе будет
равно:
 ;
(7.1)
;
(7.1)
 В.
В.
Зная напряжение на преобразователе можно определить требуемую скважность.
 ;
(7.2)
;
(7.2)
 ;
;
Максимальное и минимальное значение тока якоря в установившихся
 ;
(7.3)
;
(7.3)
 ;
(7.4)
;
(7.4)
Где коэффициенты a1 и b1 определяются следующим образом
 (7.5)
(7.5)
 (7.6)
(7.6)
Расчетные значения коэффициентов a1, b1 и IMAX сведены в таблицах
Таблица 7.1 Значения коэффициентов а1 и b1
|
|
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
|
|
0.819 |
0.819 |
0.819 |
0.819 |
0.819 |
0.819 |
|
|
1 |
1.041 |
1.083 |
1.127 |
1.174 |
1.121 |


Таблица 7.2 Значения максимального тока якоря
|
|
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
|
Imax |
0 |
11.7 |
23 |
33.8 |
44 |
54 |
Для номинального режима
 ;
;
 ;
;
 А;
А;
 А;
А;
Амплитуда пульсаций тока якоря:
 ;
(7.7)
;
(7.7)
Таблица 7.3 Амплитуда пульсаций тока якоря
|
|
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
|
|
0 |
0.153 |
0.230 |
0.230 |
0.153 |
0 |

Для номинального режима:
 А;
А;
Из (7.7) следует, что амплитуда пульсаций тока якоря, при заданных параметрах цепи нагрузки, зависит от времени включенного состояния
и частоты переключения транзистора и уменьшается с увеличением частоты переключения при заданном времени выключенного состояния транзистора.

Рисунок 7.1 Амплитуды пульсаций тока якоря
Среднее значение тока транзистора
 ;
(7.8)
;
(7.8)
 А;
А;
Таблица 7.4 Среднее значение тока
транзистора при скважности
|
|
0 |
55 |
110 |
165 |
220 |
275 |
330 |
385 |
440 |
|
IТ. СР |
54 |
47.4 |
40.7 |
34 |
27 |
20.5 |
13.8 |
7 |
0 |
Таблица 7.5 Среднее значение тока
транзистора при скважности
|
|
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
354 |
|
IТ. СР |
43 |
38.7 |
34.4 |
30 |
25.5 |
21 |
16.7 |
12.4 |
8.5 |
Таблица 7.6 Среднее значение тока
транзистора при скважности
|
|
0 |
33 |
66 |
99 |
132 |
165 |
198 |
231 |
265 |
|
IТ. СР |
32.3 |
29.8 |
27.4 |
25 |
22.6 |
20.1 |
17.7 |
15.3 |
12.8 |
Таблица 7.7Среднее значение тока
транзистора при скважности
|
|
0 |
22 |
44 |
66 |
88 |
110 |
132 |
154 |
177 |
|
IТ. СР |
21.4 |
20.3 |
19.3 |
18.2 |
17.1 |
16 |
15 |
13.9 |
12.8 |
Таблица 7.4 Среднее значение тока
транзистора при скважности
|
|
0 |
12 |
24 |
36 |
48 |
60 |
72 |
84 |
90 |
|
IТ СР. |
10.7 |
10.4 |
10 |
9.8 |
9.5 |
9.2 |
8.9 |
8.6 |
8.4 |
Среднее значение тока обратного диода
 ;
(7.9)
;
(7.9)
Для номинального режима работы:

Таблица 7.5 Среднее значение тока обратного
диода при
|
|
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
354 |
|
IД. СР |
8.7 |
7.5 |
6.5 |
5.4 |
4.3 |
3.2 |
2 |
0.9 |
0 |
Таблица 7.6 Среднее значение тока обратного
диода при
|
|
0 |
33 |
66 |
99 |
132 |
165 |
198 |
231 |
265 |
|
IД. СР |
13 |
11.4 |
9.7 |
8.1 |
6.5 |
4.9 |
3.3 |
1.7 |
0 |
Таблица 7.7 Среднее значение тока обратного
диода при
|
|
0 |
22 |
44 |
66 |
88 |
110 |
132 |
154 |
177 |
|
IД. СР |
13 |
11,4 |
9.7 |
8.1 |
6.5 |
4.9 |
3.3 |
1.7 |
0 |
Таблица 7.8 Среднее значение тока обратного
диода при
|
|
0 |
12 |
24 |
36 |
48 |
60 |
72 |
84 |
90 |
|
IД. СР |
8.7 |
7.5 |
6.3 |
5.1 |
3.9 |
2.8 |
1.6 |
0.4 |
0 |
Зависимость среднего действующего тока в обратном диоде от относительной длительности включения транзистора представлена на рисунке 7.2

Рисунок 7.2 Зависимость среднего действующего тока в диоде от скважности.
Где кривая “1” – при скорости 314 рад/с;
кривая “2” – при скорости 250 рад/с;
кривая “3” – при скорости 150 рад/с;
кривая “4” – при скорости 50 рад/с.
8. Расчет энергетических характеристик
Потери в двигателе складываются из переменных, зависящих от нагрузки, и постоянных потерь, не зависящих от нагрузки.
Мощность потребляемая двигателем равна:
 ;
(8.1)
;
(8.1)
где
 Вт
- номинальная мощность двигателя.
Вт
- номинальная мощность двигателя.
 Вт;
Вт;
 Вт;
Вт;
Потери мощности в якоре двигателя определяются из выражения:
 ;
(8.2)
;
(8.2)
 Вт;
Вт;
Номинальные потери в двигателе:
 ;
(8.3)
;
(8.3)
 Вт;
Вт;
Механические потери двигателя постоянного тока составляют 0.5% от номинальных потерь:
 ;
(8.4)
;
(8.4)
 Вт;
Вт;
Потери в стали:
 (8.5)
(8.5)
Для построения зависимости
 и
и
 можно воспользоваться (4.2) преобразовав
ее следующим образом:
можно воспользоваться (4.2) преобразовав
ее следующим образом:
 ;
;
 ;
;
 ;
(8.6)
;
(8.6)
 ;
(8.7)
;
(8.7)
 ;
(8.8)
;
(8.8)
 ;
(8.9)
;
(8.9)
 ;
(8.10)
;
(8.10)
 ;
(8.11)
;
(8.11)
Расчетные значения функции
представлены в таблице 8.1
Таблица 8.1 Расчет функции
|
|
417 |
360 |
314 |
250 |
200 |
120 |
70 |
|
|
1 |
0.69 |
0.55 |
0.43 |
0.37 |
0.3 |
0.26 |

В графической форме расчет значений
 изображен на рисунке 8.1
изображен на рисунке 8.1

Рисунок 8.1 Зависимость К.П. Д от скорости
Расчетные значения функции
представлены в таблице 8.2
Таблица 8.2 Расчет функции
|
|
0 |
3 |
7 |
12.5 |
25 |
40 |
51 |
|
|
1 |
0.84 |
0.69 |
0.55 |
0.38 |
0.28 |
0.23 |

В графической форме расчет значений
изображен на рисунке 8.2

9. Математическая модель системы ШИП – ДПТ
Математической моделью системы ШИП – ДПТ для плавного пуска будет являться модель обычного ДПТ, с той лишь разницей, что на якорь напряжение должно подаваться импульсами с возрастающей скважностью. Моделью системы может быть модель представлена на рисунке 1 выполнена в пакете “Matlab”
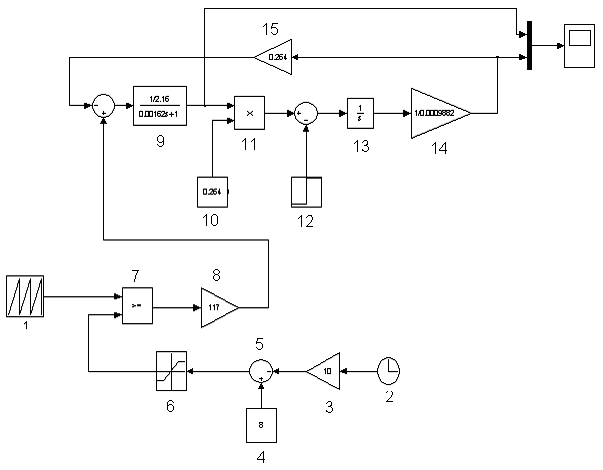
Рисунок 1 Модель системы ШИП – ДПТ
Генератор пилообразных колебаний “1”
вырабатывает колебания пилообразной
формы с периодом равным периоду коммутации
транзистора
,
и амплитудой равной “10” форма которых
представлена на рисунке 2.

Рисунок 2 Сигнал 1 на входе компаратора
Блоки “2” и “3” формируют возрастающую во времени функцию, наклон которой может регулироваться изменением коэффициента блока “3”. В нашем случае коэффициент должен быть равным амплитуде пилообразных колебаний.
Предполагается, что формирование
импульсов происходит с минимального
значения скважности принятого, например,
.
Изменять начальную скважность можно
изменяя значение блока “4”. С возрастанием
времени будет уменьшаться разность
функций после сумматора “5”. Ограничение
этого разностного сигнала с помощью
блока ограничения “6” на уровне равном
“0.6”, позволит в дальнейшем получить
рассчитанную ранее номинальную скважность
 .
.
Вид полученного разностного сигнала с ограничением на уровне “0.6” представлен на рисунке 3.

Рисунок 3 Сигнал 2 на входе компаратора
Этот сигнал поступает на вход компаратора “7” совместно с сигналом от блока пилообразных колебаний. На компараторе эти два сигнала сравниваются, и в моменты времени когда функции оказываются равными, компаратор “7” на выходе выдает единичный импульс. Сигнал с выхода компаратора показан на рисунке 3. Рассмотрен не все время пуска, а только три периода коммутации ключа ввиду сильного загромождения графика.

Рисунок 4 Формирование импульсов.
С помощью усилителя “8” полученные
импульсы усиливаются до величины
требуемого напряжения
 В.
В.
Модель двигателя постоянного тока
применяется стандартной и подробно
описываться не будет. Данные для
моделирования ДПТ берутся из расчета
схемы замещения. Блок “9” является
передаточной функцией Uя=>Iя.
Далее полученный ток умножается на
блоке умножения “11” с потоком полученным
с блока “10”. Полученный в результате
умножения момент складывается на
сумматоре с моментом сопротивления
имеющим отрицательный знак. Во избежание
захода скорости в отрицательную область
в начальные моменты времени, момент
сопротивления подается лишь после
достижения двигателем номинальной
скорости. Это реализовано с помощью
блока “12”. Блоки “13” и “14” являются
передаточной функцией вида М-Мс=> .
Противо-Э.Д.С. определяется умножением
угловой скорости
на поток в блоке “15”. Сравнение угловых
скоростей и токов якоря при прямом и
плавном пуске для одного и того же
двигателя графически представлено на
рисунке 5
.
Противо-Э.Д.С. определяется умножением
угловой скорости
на поток в блоке “15”. Сравнение угловых
скоростей и токов якоря при прямом и
плавном пуске для одного и того же
двигателя графически представлено на
рисунке 5

Рисунок 5 Ток и скорость при разных пусках
где кривая “1” - график изменения угловой скорости от времени при прямом пуске;
кривая “2” - график изменения тока якоря от времени при прямом пуске;
кривая “3” - график изменения угловой скорости от времени при плавном пуске;
кривая “4” - график изменения тока от времени при плавном пуске;
Время пуска можно увеличивать или уменьшать, изменяя соответствующим образом значение коэффициента блока “3”.
ВЫВОД
В ходе выполнения курсового проекта была произведена оценка эффективности использования широтно-импульсных преобразователей для промышленности и других отраслей народного хозяйства, а также возможность применения ШИП для плавного пуска двигателя.
В процессе работы были разработаны принципиальная, функциональная схемы проектируемого стенда, а также разработана и смонтирована система управления силовым транзистором на базе микроконтроллера PIC 16F 877. Рассчитаны и выбраны силовые элементы цепи, рассчитана схема замещения, построены статические и энергетические характеристики, а также методом математического моделирования в пакете “Matlab” получена модель системы ШИП – ДПТ. На основании полученных динамических характеристик сделаны выводы относительно разности прямого и плавного пуска.