Автоматизированное производство (работа 1)
1. Особенности проектирования технологических процессов в условиях автоматизированного производства
Основой автоматизации производства являются технологические процессы (ТП), которые должны обеспечивать высокую производительность, надежность, качество и эффективность изготовления изделий.
Характерной особенностью ТП обработки и сборки является строгая ориентация деталей и инструмента относительно друг друга в рабочем процессе (первый класс процессов). Термообработка, сушка, окраска и прочее в отличие от обработки и сборки не требуют строгой ориентации детали (второй класс процессов).
ТП классифицируют по непрерывности на дискретные и непрерывные.
Разработка ТП АП по сравнению с технологией неавтоматизированного производства имеет свою специфику:
Автоматизированные ТП включают не только разнородные операции механической обработки резанием, но и обработку давлением, термообработку, сборку, контроль, упаковку, а также транспортно-складские и другие операции.
Требования к гибкости и автоматизации производственных процессов диктуют необходимость комплексной и детальной проработки технологии, тщательного анализа объектов производства, проработки маршрутной и операционной технологии, обеспечения надежности и гибкости процесса изготовления изделий с заданным качеством.
При широкой номенклатуре изделий технологические решения многовариантны.
Возрастает степень интеграции работ, выполняемых различными технологическими подразделениями.
Основные принципы построения технологии механообработки в АПС
Принцип завершенности. Следует стремиться к выполнению всех операций в пределах одной АПС без промежуточной передачи полуфабрикатов в другие подразделения или вспомогательные отделения.
Принцип малооперационной технологии. Формирование ТП с максимально возможным укрупнением операций, с минимальным числом операций и установок в операциях.
Принцип «малолюдной» технологии. Обеспечение автоматической работы АПС в пределах всего производственного цикла.
Принцип «безотладочной» технологии. Разработка ТП, не требующих отладки на рабочих позициях.
Принцип активно-управляемой технологии. Организация управления ТП и коррекция проектных решений на основе рабочей информации о ходе ТП. Корректироваться могут как технологические параметры, формируемые на этапе управления, так и исходные параметры технологической подготовки производства (ТПП).
Принцип оптимальности. Принятие решения на каждом этапе ТПП и управления ТП на основе единого критерия оптимальности.
Помимо рассмотренных для технологии АПС характерны и др. принципы: компьютерной технологии, информационной обеспеченности, интеграции, безбумажной документации, групповой технологии.
2. Типовые и групповые ТП
Типизация технологических процессов для сходных по конфигурации и технологическим особенностям групп деталей предусматривает их изготовление по одинаковым ТП, основанным на применении наиболее совершенных методов обработки и обеспечивающим достижение наивысшей производительности, экономичности и качества. Основа типизации — правила обработки отдельных элементарных поверхностей и правила назначения очередности обработки этих поверхностей. Типовые ТП находят применение, главным образом, в крупносерийном и массовом производстве.
Принцип групповой технологии лежит в основе технологии переналаживаемого производства — мелко- и среднесерийного. В отличие от типизации ТП при групповой технологии общим признаком является общность обрабатываемых поверхностей и их сочетаний. Поэтому групповые методы обработки характерны для обработки деталей с широкой номенклатурой.
И типизация ТП, и метод групповой технологии являются основными направлениями унификации технологических решений, повышающей эффективность производства.
Классификация деталей
Классификацию производят в целях определения групп технологически однородных деталей для их совместной обработки в условиях группового производства. Выполняют ее в два этапа: первичная классификация, т. е. кодирование деталей обследуемого производства по конструктивно-технологическим признакам; вторичная классификация, т. е. группирование деталей с одинаковыми или несущественно отличающимися признаками классификации.
При классификации деталей нужно учитывать следующие признаки: конструктивные — габаритные размеры, массу, материал, вид обработки и заготовки; число операций обработки; точностные и другие показатели.
Группирование деталей выполняют в такой последовательности: выбор совокупности деталей на уровне классов, например тела вращения для механообрабатывающего производства; выбор совокупности деталей на уровне подкласса, например детали типа вала; классификация деталей по комбинации поверхностей, например валы с комбинацией гладких цилиндрических поверхностей; группирование по габаритным размерам с выделением областей с максимальной плотностью распределения размеров; определение по диаграмме областей с наибольшим числом наименований деталей.
Технологичность конструкций изделий для условий АП
Конструкция изделия считается технологичной, если для его изготовления и эксплуатации требуются минимальные затраты материалов, времени и средств. Оценка технологичности проводится по качественным и количественным критериям отдельно для заготовок, обрабатываемых деталей, сборочных единиц.
Детали, подлежащие обработке в АП, должны быть технологичны, т. е. просты по форме, габаритам, состоять из стандартных поверхностей и иметь максимальный коэффициент использования материала.
Детали, подлежащие сборке, должны иметь как можно больше стандартных поверхностей соединений, простейших элементов ориентации сборочных единиц и деталей.
3. Особенности проектирования технологических процессов изготовления деталей на автоматических линиях и станках с ЧПУ
Автоматическая линия — это непрерывно действующий комплекс взаимосвязанного оборудования и системы управления, где необходима полная временная синхронизация операций и переходов. Наиболее эффективными методами синхронизации являются концентрация и дифференциация ТП.
Дифференциация технологического процесса, упрощение и синхронизация переходов — необходимые условия надежности и производительности. Чрезмерная дифференциация приводит к усложнению обслуживающего оборудования, увеличению площадей и объема обслуживания. Целесообразная концентрация операций и переходов, не снижая практически производительность, может быть осуществлена путем агрегатирования, применением многоинструментальных наладок.
Для синхронизации работы в автоматической линии (АЛ) определяется лимитирующий инструмент, лимитирующий станок и лимитирующий участок, по которым устанавливается реальный такт выпуска АЛ (мин) по формуле

где Ф - действительный фонд работы оборудования, ч; N—программа выпуска, шт.
Для обеспечения высокой надежности АЛ разделяют на участки, которые связаны друг с другом через накопители, осуществляющие так называемую гибкую связь между участками, обеспечивая независимую работу смежных участков в случае отказа на одном из них. Внутри участка сохраняется жесткая связь. Для оборудования с жесткой связью важно планировать время и длительность плановых остановок.
Станки с ЧПУ дают высокую точность и качество изделий и могут использоваться при обработке сложных деталей с точными ступенчатыми или криволинейными контурами. При этом снижается себестоимость обработки, квалификация и число обслуживающего персонала. Особенности обработки деталей на станках с ЧПУ определяются особенностями самих станков и в первую очередь их системами ЧПУ, которые обеспечивают:
сокращение времени наладки и переналадки оборудования; 2)увеличение сложности циклов обработки; 3) возможность реализации ходов цикла со сложной криволинейной траекторией; 4) возможность унификации систем управления (СУ) станков с СУ другого оборудования; 5) возможность использования ЭВМ для управления станками с ЧПУ, входящими в состав АПС.
Основные требования к технологии и организации механической обработки в переналаживаемых АПС на примере изготовления основных типовых деталей
Для разработки технологии в АПС характерен комплексный подход — детальная проработка не только основных, но и вспомогательных операций и переходов, включая транспортировку изделий, их контроль, складирование, испытания, упаковку.
Для стабилизации и повышения надежности обработки применяют два основных метода построения ТП:
использование оборудования, обеспечивающего надежную обработку почти без участия оператора;
регулирование параметров ТП на основе контроля изделий в ходе самого процесса.
Для повышения гибкости и эффективности в АПС используют принцип групповой технологии.
4. Особенности разработки ТП автоматизированной и роботизированной сборки
Автоматизированная сборка изделий выполняется на сборочных автоматах и АЛ. Важным условием разработки рационального ТП автоматизированной сборки является унификация и нормализация соединений, т. е. приведение их к определенной номенклатуре видов и точностей.
Главным отличием роботизированного производства является замена сборщиков сборочными роботами и выполнение контроля контрольными роботами или автоматическими контрольными устройствами.
Роботизированная сборка должна выполняться по принципу полной взаимозаменяемости или (реже) по принципу групповой взаимозаменяемости. Исключается возможность подгонки, регулировки.
Выполнение операций сборки должно проходить от простого к сложному. В зависимости от сложности и габаритов изделий выбирают форму организации сборки: стационарную или конвейерную. Состав РТК — это сборочное оборудование и приспособления, транспортная система, операционные сборочные роботы, контрольные роботы, система управления.
При разработке ТП сборки в РТК предпочтительна высокая концентрация операций, определяющая модели роботов, их функции, точность, оперативность, быстродействие. Особенно важно уточнить временные связи элементов РТК, так как и они могут определить операционные возможности, модели и количество сборочных промышленных роботов (ПР). С этой целью возможно построение циклограммы как отдельных роботизированных рабочих мест и ПР, так и всего РТК в целом.
Обучаемые роботы — это роботы, которые могут приспосабливаться к различным случайным факторам, сопровождающим запрограммированную работу. Эта приспособляемость выражается в корректировке своей же программы на основе полученного «опыта» — результатов анализа и классификации возникающих отклонений и методов их устранения.
5. Производительность АС
Эффективность автоматизации определяется, прежде всего, экономической эффективностью, а также взаимосвязью технических и экономических показателей производства. Производительность труда и коэффициент роста производительности труда являются обобщенными показателями автоматизированного производства (АП).
Методы расчета и оценки производительности автоматизированных систем
Производительность определяется числом годных деталей, изделий, комплектов, выпускаемых машиной в единицу времени. Время обработки детали машиной является величиной, обратной производительности.
При расчете, анализе и оценке производительности автоматизированного оборудования с учетом разных видов затрат времени используют четыре вида ее показателей.
Технологическая производительность К — максимальная теоретическая производительность при условии бесперебойной работы машины и обеспечения ее всем необходимым:
 .
.
Цикловая производительность Q>ц> — теоретическая производительность машины с реальными холостыми и вспомогательными ходами и при отсутствии простоев (Σt>пр> = 0):
 ,
,
Техническая производительность Q>т> — теоретическая производительность машины с реальными холостыми ходами и учетом ее собственных простоев Σt>c>, связанных с выходом из строя инструментов, приспособлений, оборудования, т.е. при условии t>х> > 0, t>всп> > 0 и Σt>с> > 0:
 .
.
Фактическая производительность Q>ф> — производительность, учитывающая все виды потерь:
 .
.
Чем чаще и длительнее простои, тем ниже производительность.
Производительность автоматических линий с разным агрегатированием
На однопоточных линиях последовательного агрегатирования концентрируют разноименные операции ТП, последовательно выполняемые для каждого изделия.
Такие линии могут иметь жесткую межагрегатную связь без межоперационных накопителей заделов или гибкую связь с установкой таких накопителей.
Техническая производительность линии с жесткой связью
 ,
,
где t>p> — время рабочих ходов цикла, определяемое длительностью обработки на лимитирующей позиции.
ВАЛ параллельного агрегатирования концентрируют одноименные операции дифференцированного технологического процесса, выполняемые на р изделиях. За время рабочего цикла Т>ц> выдается р изделий, следовательно цикловая производительность таких линий
 .
.
В условиях массового производства используются две основные модификации этих линий:
1) линии из автоматов дискретного последовательного действия, работающих параллельно;
2) линии из автоматов параллельного действия, работающих последовательно.
Для линий первой модификации техническая производительность
 .
.
Для линий второй модификации техническая производительность
 .
.
Если многопоточная АЛ разделяется на участки-секции по методу равных потерь, то расчет производительности целесообразно проводить по выпускному участку
 ,
,
где р — число потоков выпускного участка; Т>ц> — длительность рабочего цикла выпускного участка; В — внецикловые потери одной рабочей позиции; q — число рабочих позиций на выпускном участке; n>у> — число участков в линии; W — коэффициент возрастания простоев выпускного участка из-за неполной компенсации отказов предыдущих участков.
6. Надежность в автоматизированном производстве
Надежность — это способность машин и механизмов выполнять заданные функции, сохраняя во времени значения эксплуатационных показателей в заданных пределах, соответствующих установленным режимам и условиям использования. Для автоматизированных систем надежность — это способность к бесперебойному выпуску годной продукции в установленном программой объеме в течение всего срока службы.
Основными свойствами машин, определяющими надежность, являются безотказность, долговечность и ремонтопригодность.
Показатели и методы оценки надежности
Показатели надежности делятся на частные, которые оценивают безотказность, ремонтопригодность, долговечность по отдельности, и комплексные (обобщенные), которые оценивают все три свойства.
Частным показателем безотказности является функция надежности P(t)
 ,
,
где ω(t) — параметр потока отказов, характеризующий вероятность возникновения отказов в единицу времени или за рабочий цикл; Т — период эксплуатации системы.
Технический ресурс R — равен суммарной наработке за весь срок службы Т от ввода в эксплуатацию до предельного состояния (разрушение, потеря точности):
 ,
,
где t>раб>>i> — i - я наработка на отказ; n — число отказов системы за период T ее эксплуатации; θ>cp>>i> — среднее время устранения i - го отказа, определяемое ремонтопригодностью системы.
Надежность сложных многоэлементных систем
При расчленении сложной системы на отдельные элементы, для каждого из которых можно определить вероятность безотказной работы, для расчета надежности широко используют структурные схемы. В этих схемах каждый i - й элемент характеризуется своей вероятностью P>i> безотказной работы в течение заданного периода времени. Исходя из этих данных, определяют вероятность безотказной работы P(t) всей системы.

Вероятность безотказной работы такой системы при независимости отказов равна произведению вероятностей безотказной работы ее элементов:
 .
.
Для повышения надежности сложных систем можно применять резервирование, когда при выходе из строя одного из элементов дублер выполняет его функции, и элемент не прекращает своей работы.
Технологическая надежность оборудования
Технологическая надежность — это свойство оборудования сохранять значения показателей, определяющих качество осуществления технологического процесса, в заданных пределах и во времени.
К показателям качества технологического оборудования относятся его геометрическая точность, жесткость, виброустойчивость и другие показатели, которые определяют точность обработки, качество поверхности и физические характеристики материала обрабатываемой детали. К наиболее действенным методам повышения технологической надежности оборудования относится метод автоматической подналадки и саморегулирования его параметров. При реализации этого метода изменившиеся параметры автоматически восстанавливаются за счет систем саморегулирования, структура которых зависит от скорости воздействия разных процессов на параметры оборудования.
7. Контроль и диагностика в условиях автоматизированного производства
В основе мер обеспечения надежной работы автоматизированных систем лежит непрерывный или периодический контроль за ходом технологических процессов, реализуемых в этих системах. Для реализации этих функций в современном производстве используются микропроцессоры, лазерные системы и др.
Контроль — это проверка соответствия объекта установленным техническим требованиям. Под объектом технического контроля понимаются подвергаемая контролю продукция, процессы ее создания, применения, транспортирования, хранения, технического обслуживания и ремонта, а также соответствующая техническая документация.
Следовательно, объектом может быть как продукция, так и процесс ее создания.
Важным условием эффективной работы в автоматизированном режиме и быстрого восстановления работоспособности оборудования является его оснащение средствами диагностики.
Организация автоматизированного контроля в производственных системах
Контроль в АП может быть межоперационным (промежуточным), операционным (непосредственно на станке), послеоперационным, окончательным. Автоматизированному контролю должны подвергаться все элементы технологической системы: деталь, режущий инструмент, приспособление, само оборудование. Предпочтительными являются методы прямого контроля, хотя методы косвенного контроля шире используются при контроле инструментов, диагностике состояния оборудования.
Контроль в процессе обработки является одной из наиболее активных форм технического контроля, так как позволяет повысить качество выпускаемой продукции при одновременном увеличении производительности труда. Поэтому разрабатываются самонастраивающиеся системы управляющего контроля.
Контроль самонастраивающийся управляющий — это управляющий контроль, при котором на основе информации, получаемой при изменяющихся условиях работы, автоматически изменяются параметры настройки средства контроля до обеспечения заданной точности при произвольно меняющихся внешних и внутренних возмущениях.
Контроль деталей и изделий в автоматизированных системах
Непосредственно на участке механической обработки осуществляют контроль трех видов:
• установки заготовки в приспособление;
• размера изделия непосредственно на станке;
• выходной контроль детали.
Контроль установки заготовки в приспособление может осуществляться на конвейере перед станком или на станке непосредственно перед обработкой. В первом случае могут использоваться датчики положения, расположенные на конвейере, или специальные измерительные установки с роботами. Бесконтактные датчики положения регистрируют отклонение действительного положения измеряемой поверхности от запрограммированного или разность условной базы и измеряемой поверхности (датчики касания).
К бесконтактным датчикам относятся: оптические измерители; лазерные датчики; датчики изображения (технического зрения). Выносной контроль заготовок и деталей в процессе их транспортирования не удлиняет производственного цикла, однако наиболее оперативным является контроль заготовок и деталей непосредственно на станке. При небольшом увеличении длительности обработки он существенно повышает ее качество, активно воздействуя на процесс обработки.
Диагностика технологической системы
Важным условием эффективной эксплуатации в автоматизированном режиме, быстрого восстановления работоспособности оборудования является оснащение его средствами диагностики.
Технической диагностикой (ТД) называется процесс определения во времени технического состояния объекта диагностики (ОД) с определенной точностью в условиях ограниченной информации.
С помощью ТД решаются следующие задачи:
• определение работоспособности технических устройств;
• определение форм проявления отказов;
• разработка методов локализации, распознавания и прогнозирования скрытых дефектов без разборки или с нетрудоемкой разборкой технических устройств;
8. Принципы построения и примеры автоматизированных производственных систем
Автоматизированные производственные системы создаются на базе соответствующего оборудования в зависимости от отрасли и типа производства. Оборудование может быть универсальным, агрегатным, специальным и специализированным. Это могут быть автоматы, полуавтоматы, обрабатывающие центры, станки с ЧПУ.
В зависимости от межстаночного транспорта АЛ классифицируются следующим образом:
• со сквозным транспортом без перестановки изделия;
• с транспортной системой с перестановкой изделия;
• с транспортной системой с накопителями.
По видам компоновки (агрегатирования) различают следующие АЛ;
• однопоточную;
• параллельного агрегатирования;
• многопоточную;
• скомпонованную из роботизированных ячеек.
Последняя линия получила преимущественное развитие в силу возможности создания переналаживаемых производств.
Производственным модулем называют состоящую из единицы технологического оборудования систему, оснащенную автоматизированным устройством программного управления (ПУ) и средствами автоматизации технологического процесса, автономно функционирующую и имеющую возможность быть встроенной в систему более высокого уровня.
Частным случаем ПМ является производственная ячейка (ПЯ) — комбинация из элементарных модулей с едиными системами измерений, инструментообеспечения, транспортно-накопительной и погрузочно-разгрузочной системами, с групповым управлением.
Автоматизированная линия — переналаживаемая система, состоящая из нескольких ПМ и (или) ПЯ, объединенных единой транспортно-складской системой и системой АСУ ТП. Оборудование АЛ (рисунок 3) размещено в принятой последовательности технологических операций.
Выбор технологического оборудования и промышленных роботов в условиях АП
Исходной информацией для выбора оборудования и промышленных роботов (ПР) являются сведения об изготовляемых деталях и организационно-технологических условиях их изготовления.
Подбор и группирование деталей для изготовления на автоматизированном участке выполняют с учетом следующих характеристик:
1) конструктивно-технологическое подобие деталей, т.е. сходство по габаритным размерам, массе, конфигурации, характера конструктивных элементов, требованиям к точности обработки я качеству обрабатываемых поверхностей, числу обрабатываемы» поверхностей;
2) максимальная степень завершенности маршрута обработки деталей на автоматизированном участке без прерывания маршрута обработки для выполнения каких-либо специфических операция (термической обработки, доводки и др.);
3) подобие используемой оснастки и инструментов;
4) наличие у деталей четко выраженных признаков ориентации, однородных по форме и расположению поверхностей дли базирования в приспособлениях-спутниках или захвата захватными устройствами П Р.
Подобранная группа деталей с учетом годовой программы выпуска, размера и частоты повторяемости каждого типоразмера.
Числа переналадок должна обеспечить загрузку оборудования при двух-, трехсменной работе.
На основе подобранной группы деталей с учетом видов обработки и трудоемкости проводится выбор типажа требуемого оборудования, приспособлений, ПР, характера и маршрута транспортирования деталей. На этом этапе определяется компоновка автоматизированного производственного участка, рассчитываются вместимость автоматизированного склада, число спутников, выполняется оптимизация пространственного расположения оборудования.
9. Построение циклограмм функционирования робототехнических комплексов. Примеры переналаживаемых автоматизированных систем механической обработки. Требования к инструментам и приспособлениям, используемым в АПС. Методика построения циклы функционирований роботизированного технологического комплекса
Для построения циклограммы функционирования РТК необходимо:
1) определить все движения (переходы) основного и вспомогательного оборудования (робота, станка, накопителя), необходимые для выполнения заданного цикла обработки детали;
2) определить и составить перечень всех механизмов основного и вспомогательного оборудования, участвующих в формировании заданного цикла;
3) задать исходное положение механизмов робота, станка, транспортера;
4) составить последовательность движений оборудования за цикл в виде таблицы;
5) определить время выполнения каждого движения t>h>:
t>i>=α>i>/ω>i>
t>i> =li/υ>i>
где α>i>,— угол поворота механизмов, li,— линейное перемещение механизмов, мм; ω>i>, υ>i> — соответственно паспортные скорости углового, °/с, и линейного, мм/с, перемещения механизмов по соответствующей координате.
Примеры переналаживаемых автоматизированных систем для изготовления типовых деталей
Обработка типовых деталей ведется по типовым тех.процессам, что делает необходимым использование в автоматизированных системах металлорежущих станков определенных типов.
В РТК для обработки деталей типа тел вращения преобладают фрезерно-центровальные, токарные и шлифовальные станки с ЧПУ, обслуживаемые ПР. Для обработки корпусных деталей в РТК преобладают фрезерные и сверлильные станки с ЧПУ, многоцелевые станки типа «обрабатывающий центр», объединенные транспортно-накопительной системой.
Автоматизированные переналаживаемые системы типа АСК представляют собой РТК, включающие комплекты оборудования с ЧПУ для обработки корпусных деталей, объединенные единой транспортно-накопительной системой и системой управления на базе ЭВМ. Участки типа АСК предназначены для черновой и чистовой обработки корпусных деталей в мелкосерийном производстве.
На станках с ЧПУ выполняют фрезерные, расточные, сверлильные, резьбонарезные и другие операции. Кроме этих станков, в состав участков типа АСК могут входить координатно-разметочная машина с цифровой индикацией и контрольно-измерительная машина с ЧПУ.
Для обработки корпусных деталей на АСК применяются многоцелевые станки с ЧПУ и автоматической сменой инструмента. Компоновка станков дает возможность обрабатывать детали с четырех сторон за одну установку с точностью растачиваемых отверстий по H7-H8 и Ra 1,25...2,5 мкм.
Требования к инструментам и приспособлениям, используемым в АПС
Инструментальная оснастка должна быть более жесткой, массивной и виброустойчивой, чем в условиях неавтоматизир-ого производства.
Для обеспечения заданной точности режущий инструмент должен обладать рядом свойств:
1)высокой режущей способностью и надежностью при использовании наиболее совершенных инструментальных материалов;
2)повышенной точностью за счет изготовления инстр-тов по спец-ым ужесточенным стандартам;
3)универсальностью, позволяющей обрабатывать сложные детали за один автоматический цикл;
4)высокой жесткостью и виброустойчивостью;
5)быстросменностью;
6) возможностью автоматической настройки и поднастройки.
Для установки деталей в АП применяют автоматизир-нные стационарные присп. и присп.-спутники. Различают 3 вида стационарных присп.: специальные (одноцелевые, непереналаживаемые), специализированные (узкоцелевые, ограниченно переналаживаемые), универсальные (многоцелевые, широкопереналаживаемые). В качестве стационарных присп. и сменных наладок присп.-спутников в переналаж. многономенклатурном производстве применяют стандартные системы присп.: универсально-сборные, универсально-наладочные, сборно-разборные, специализированные наладочные и др. Эти присп. состоят из базового агрегата и наладок, кот. устанавливают на базовый агрегат и регулируют непосредственно на столе станка или нижней плите спутника. Приводы механизмов зажима должны обеспечивать возможность регулировки силы зажима в определенных пределах. Этому требованию удовлетворяют гидроприводы, пневмогидроприводы и пневмоприводы.
Число фиксаторов в приспособлении должно быть минимальным (один - два).
10. Загрузочные устройства автоматизированных систем. Магазинные загрузочные устройства. Бункерные загрузочные устройства. Отсекатели и механизмы поштучной выдачи
Загрузочные устройства автоматизированных систем это группа целевых механизмов, включающая в себя подъемники, транспортеры-распределители, механизмы приема и выдачи изделий, лотковые системы, отводящие транспортеры, межоперационные накопители (бункерные и магазинные), автооператоры.
Магазинные загрузочные устройства в зависимости от способа транспортирования можно разбить на 3 класса: самотечные; принудительные (магазины-транспортеры); полусамотечные. В магазинных устройствах всех классов детали с момента поступления хранятся и выдаются в ориентированном состоянии. В самотечных (гравитационных) МЗУ заготовки перемещаются под действием сил тяжести. Такие магазины используются для подачи заготовок вплотную, а заготовок специальной формы - вразрядку, т.е. с интервалом, для чего каждая заготовка помещается в отдельное гнездо или между захватами транспортирующего элемента. Заготовки перемещаются качением или скольжением.
В принудительных МЗУ и транспортных устройствах заготовки перемещаются с помощью приводных механизмов в любом направлении и с любой скоростью. Устройствами этого типа можно транспортировать заготовки с помощью несущих средств (транспортеров) или специальными захватами вплотную и вразрядку, поштучно или порциями. Наиболее широко используются устройства с орбитальным движением рабочих органов перемещения заготовки, с вращающимися гладкими валками, одно- и двухвинтовые, инерционные, барабанные, карусельные и др.
В полусамотечных МЗУ заготовки скользят по плоскости, расположенной под углом, значительно меньшим угла трения. Заготовки перемещаются вследствие искусственного уменьшения силы трения между поверхностями скольжения при поперечном колебании несущей поверхности или в результате образования между поверхностями скольжения воздушной подушки.
Бункерные загрузочные устройства представляют собой емкости с ориентированными заготовками, расположенными в один или несколько рядов. Особенностью БЗУ следует считать отсутствие захватных и ориентирующих устройств и ручную ориентацию заготовок. БЗУ отличаются одно от другого расположением, характером перемещения заготовок в них и способом выдачи заготовок. Как правило, в бункерах хранятся и выдаются заготовки деталей простой формы: болты, шайбы, колпачки.
Заготовки сосредоточены в бункере навалом, поэтому требуются их автоматический захват (ворошение) и ориентирование для последующей загрузки на оборудование. Бункеры могут иметь как одну емкость для накопления и захвата заготовок, так и две емкости: одну — для накопления запаса заготовок, а другую — для выдачи ориентированных заготовок.
Наибольшее распространение получили вибрационные БЗУ (вибробункеры). Принцип действия вибробункера основан на использовании поступательного движения заготовок в процессе их вибрации. Существуют вибробункеры для вертикального подъема деталей с направленной и свободной подвесками лотка или чаши. Расчет такого вибробункера проводится на основании условий требуемой производительности, размера заготовок, их массы, ориентировочной емкости бункера и других факторов.
Отсекатели — механизмы поштучной выдачи — предназначены для отделения одной заготовки (или нескольких заготовок) от общего потока заготовок, поступающих из накопителя, и для обеспечения перемещения этой заготовки (или заготовок) в рабочую зону оборудования или на транспортер. По траектории движения различают отсекатели с возвратно-поступательным, колебательным и вращательным типами движения. В качестве собственно отсекателей заготовок используют штифты, планки, кулачки, винты, барабаны, диски с пазами.
Питатели предназначены для принудительного перемещения ориентированных заготовок из накопителя в зону зажимного приспособления или на транспортирующее устройство. Конструкции питателей разнообразны; их форма, размеры, привод подвижных частей зависят от конструкции оборудования, взаимного расположения инструмента и заготовки, от формы, размеров и материала подаваемых заготовок.
Отсекатели и питатели входят в состав автоматических загрузочных устройств (ЗУ) — автооператоров. Автооператоры являются специальными целевыми ЗУ, которые состоят из питателя, отсекателя, заталкивателя, выталкивателя (съемника), отводящего устройства. Эти устройства являются специальными, т.е. применяются для обслуживания одной или ряда подобных операций. Автооператоры выполняют возвратно-поступательное, колебательное перемещение заготовок в зону обработки. При этом время работы автооператора строго синхронизировано с работой обслуживаемого оборудования. Автооп-ры могут иметь механические, магнитные, электромагнитные, вакуумные захватные устройства.
11. Транспортно – складские системы автоматизированного производства. Требования, основные виды и примеры исполнений
Транспортные устройства автоматизир-ных систем предназначены для перемещения деталей с позиции на позицию, распределения деталей по потокам, поворота и ориентации деталей. Все транспортные устр-ва делятся на автоматизир-ные системы с жесткой и гибкой связью.
С жесткой связью включают в себя: а) шаговые транспортеры; б) поворотные столы и кантователи; в) перегружатели; г) рейнеры; д) приспособления-спутники; е) механизмы возврата приспособлений-спутников.
С гибкой связью включают в себя: а) транспортеры-распределители; б) лотки; в) делители потоков; г) подъемники; д) транспортные роботы; е) ритмопитатели. В качестве составной части к транспортным механизмам с гибкой связью можно отнести: а) транспортеры-накопители; б) магазины-накопители; в) бункеры-накопители. А также относятся транспортные средства переналаживаемых автоматизированных систем.
Технические средства ТНС делятся на две группы: основное оборудование и вспомогательное.
Основное служит для перемещения грузов в условиях автоматизир-ого произв-ва — это стеллажные и мостовые краны - штабелеры, транспортные ПР, конвейеры, накопители, перегрузочные и ориентирующие устройства, транспортно-складская тара, средства АСУ.
Вспомогательное — это толкатели, ориентаторы, подъемники, питатели, адресователи.
Кроме того, в условиях автоматизир-ого произв-ва широко применяются подвесной транспорт, напольные конвейеры, транспортеры, тележечный транспорт. К подвесному транспорту относятся:
подвесные конвейеры для внутрицеховых и межоперац-ных перемещений деталей до 2 т на расстояние до 1000 м;
подвесные монорельсы для внутрицеховых грузопотоков (максимальная грузоподъемность до 20 т);
монорельсовые транспорт-ые роботы с устройтвами для перемещения изделий до 300 кг;
подвесные дороги с электротягачом и прицепными тележками грузоподъемностью до 500 кг.
К напольным конвейерам и транспортерам для поточного производства относятся:
рольганги (приводные и неприводные наклонные) для межоперац-ого перемещения изд-ий до 1200кг;
ленточные конвейеры для транспортирования мелких деталей до 250 кг с малым тактом выпуска;
тележечные конвейеры, применяемые для транспортирования изделий на сборочном участке, реже на механических участках. В зависимости от габаритов изделий применяются вертикально (до 8000 кг) и горизонтально (до 1000 кг) замкнутые конвейеры;
шаговые конвейеры с пульсирующим перемещением изделий при сборке, грузоподъемность этих конвейеров до 7 т при относительно малых габаритах и простоте конструкции.
К напольно-тележечному внутрицеховому транспорту относятся:
электропогрузчики и электротележки (электрокары) грузоподъемностью до 0,5 т;
электроштабелеры напольные грузоподъемностью до 2 т;
транспортные напольные ПР (рельсовые и безрельсовые), смонтированные на тележках и управляемые по программе.
В качестве накопителей могут использоваться автоматизир-ные склады, обслуживаемые штабелерами и транспортными ПР, и межоперационные магазины-накопители (напольные и подвесные). Магазины-накопители применяют в условиях поточного производства для деталей типа тел вращения. Подвесные накопители применяют в основном для корпусных деталей, для деталей сложной конфигурации.
Система взаимосвязанных транспортных и складских устройств, используемая на АП для укладки, хранения, временного накопления, разгрузки и доставки предметов труда, технологической оснастки, называется автоматизированной транспортно-складской системой (АТСС).
Существует два основных конструктивных варианта построения АТСС: с совмещенными и раздельными транспортной и складской подсистемами.
Основные типы автоматизированных складов:
а) клеточные стеллажные с автоматическим краном-штабелером или мостовым краном-штабелером;
б) гравитационные стеллажные с краном-штабелером; в) элеваторные стеллажные;
г) подвесные в сочетании с толкающим конвейером, имеющим автоматическое адресование грузов.
Наиболее распространены склады со стеллажными роботами-штабелерами, поскольку они весьма производительны, занимают мало места, легче автоматизируются.
12. Автоматизация сборочных операций. Роботы, используемые на операциях сборки. Структура автоматизированного сборочного технологического процесса
Автоматизированная сборка изделий выполняется на сборочных автоматах и АЛ. Важным условием разработки рационального ТП автоматизированной сборки является унификация и нормализация соединений. На основе унификации и нормализации соединений в сборочных единицах и изделиях разрабатывают типовые сборочные процессы (операции и переходы), выполняемые на типовом сборочном оборудовании с использованием типовых инструментов и приспособлений.
Главным отличием роботизированного производства является замена сборщиков сборочными роботами и выполнение контроля контрольными роботами или автоматическими контрольными устройствами.
Роботизированная сборка должна выполняться по принципу полной взаимозаменяемости или (реже) по принципу групповой взаимозаменяемости. Исключается возможность подгонки, регулировки.
Выполнение операций сборки должно проходить от простого к сложному. В зависимости от сложности и габаритов изделий выбирают форму организации сборки: стационарную или конвейерную.
Состав РТК — это сборочное оборудование и приспособления, транспортная система, операционные сборочные роботы, контрольные роботы, система управления.
При разработке ТП сборки в РТК предпочтительна высокая концентрация операций, определяющая модели роботов, их функции, точность, оперативность, быстродействие. Особенно важно уточнить временные связи элементов РТК, так как и они могут определить операционные возможности, модели и количество сборочных промышленных роботов (ПР).
Обучаемые роботы — это роботы, которые могут приспосабливаться к различным случайным факторам, сопровождающим запрограммированную работу.
Промышленные роботы, построенных по блочно-модульному принципу.
Структура алгоритма включает в себя ряд этапов.
Подготовка геометрических моделей собираемых деталей среде графического пакета САПР (при проектировании сборочного комплекса всегда можно выделить группу оборудования, обслуживаемого одним СР, и соответственно множество совершаем им для этого движений с тем, чтобы для них проектировать УП).
Имитация разборки собранного изделия с записью промежуточных точек локальных траекторий в массив точек из условия отсутствия соударений разбираемых деталей в требуемой области или точке пространства (могут быть наложены и другие условия и ограничения со стороны внешней среды).
Выбор оптимальной последовательности опорных точек локальной траектории по какому-либо критерию.
Получение вектора для шарнирных переменных в каждой точке из кинематического уравнения СР при решении обратной кинематической задачи для каждой опорной точки траектории.
5. Формирование управляющего воздействия на исполнительные механизмы СР.
В результате укрупненного проектирования сборочной операции не вызывает трудностей программирование движений манипулятора и логики управления вне локальных траекторий перемещения одним из известных способов. Вместе с тем локальные движения фазы соединения осуществляются при значительных ограничениях технологической среды и требуют сложных траекторий, сочетающих перемещение по разным степеням подвижности. Такая траектория, если и удается ее запрограммировать, требует многократной отладки, так как выполняется без учета реальных скоростей и ускорений звеньев.
14.Промышленные роботы в современном машиностроении. Основные классификационные признаки. Этапы развития. Примеры наиболее широко применяемых кинематических схем промышленных роботов
Применение роботов в совр промыш-ном производ-ве обусловлено не только стремлением к повышению производ-сти, но и к необходимости обеспечить высокое качество продукции и стабильность этого показателя при больших партиях.
Применение роботов также обусловлено:
непрерывным снижением стоимости роботов на фоне роста стоимости рабочей силы
нехваткой квалифицированной раб силы по ряду профессий
освобождением рабочих от тяжелого, интенсивного и монотонного труда, особенно на сборочных операциях
снижением влияния вредного пр-ва (сварка, окраска) на здоровье рабочих.
Применение роботов на операциях современного производства
Классификационные признаки
по уровню развития
1-го поколения – с жестким алгоритмом работы
2-го поколения – с корректировкой ф-ций (прим в совр пр-ве)
3-го поколения – роботы с элементами искусственного интеллекта.
по технологическому назначению
основные – производят непосредственное воздействие на объект труда (сварочн, окрасочн, сборочный робот)
вспомогательные – выполняют вспомогательные технологические ф-ции (загрузка/разгрузка, обслуживание оборудования)
по грузоподъемности
с малой Г – до 2 кг
со средней Г – от 2 до 50 кг
с высокой Г – свыше 50 кг
по числу степеней свободы
с малой подвижностью 1-3
со средней 3-6
с высокой свыше 6
по точности позиционирования
системы абсолютной точности и сист относительной точности.
по виду используемой системы координат
декартовая (простые роботы)
сферическая
цилиндрическая
полярная
по типу привода
гидравлический +усилия – габариты
пневматический +точность – усилия
электрический
комбинированный
по типу использования сист управления
с цикловой СУ
с позиционной СУ
с контурной СУ
Этапы развития комплексной автоматизации:
автоматизация рабочего цикла, создание автоматов и полуавтоматов. Появление автоматов явилось логическим следствием развития и совершенствования конструкции, рабочих машин
автоматизация системы машин, создание автоматических линий, объединяющих выполнение разнообразных операций обработки, контроля, сборки, упаковки и т.д.
должны создаваться автоматические цехи и заводы
Этапы развития автоматизации определяются тенденциями промышленного производства.
Кинематические схемы промышленных роботов

кинематическая схема коромысового антропоморфного 6-ти подвижного манипулятора
0 – базисное основание
1 – поворотная карусель
2 – карамысло
3 – основание руки
4 – рука
5 – кисть
6 – фланец для крепления раб инструмента

кинематическая схема параллельного антропоморфного манипулятора
0 – базисное основание
1 – поворотная колонна
2 – приводной рычаг
3 – приводная стойка
4 – основание руки
5 – рука
6 – кисть
7 – фланец крепления инструмента
15. Измерительные преобразователи. Типы датчиков. Основные характеристики датчиков. Статические характеристики датчиков. Переходные процессы в измерительных преобразователях. Понятия о чувствительности, точности и диапазонах измерений
Измерения осуществляются с помощью измерительных преобразователей, использующих те или иные физические принципы.
На объект измерения обычно выносится датчик, который состоит из одного или нескольких измерительных преобразователе. Датчик—это устройство, воспринимающее измеряемый параметр и вырабатывающее соответствующий сигнал с целью передачи его для дальнейшего использования или регистрации.
По принципу измерения:
абсолютными
циклические
По типу выходной информации:
дискретные (импульсные или цифровые)
аналоговые (на выходе сигнал в виде напрядения или фазовых данных)
Датчики могут быть:
пассивные (параметрические) для работы которых необходим внешний источник энергии:
резисторные, индуктивные, трансформаторные, емкостные датчики
активные (генераторные)
пьезоэлектрические, термоэлектрические, индукционные, фотоэлектрические датчики
Типы датчиков:
Тензорезистор (1,2,3,4,5,6)
Потенциометрический (1,2,3,4,5)
Дифференциальный трансформатор (2,3,4,5)
Термопара (7)
Емкостный (1,2,3,5,6)
Вихревой токовый (2,3,4)
Магниторезистивный (2,3)
Пьезоэлектрический (1,2,4,5,6)
Термистор (7)
Параметры: 1-Давление; 2-Перемещение; 3-Положение; 4-Скорость; 5-Ускорение; 6-Вибрация; 7-Температура
Чувствительность – величина показывающая на сколько изменится выходная величина при изменении входной.
Точность измерения – показывает как близко значение измеряемой величины к величине истинного значения.
Диапазон – разница между максимальным и минимальным значениями измеряемой величины.
Под Статической характеристикой понимают зависимость м/д установившимися входной и выходной величинами
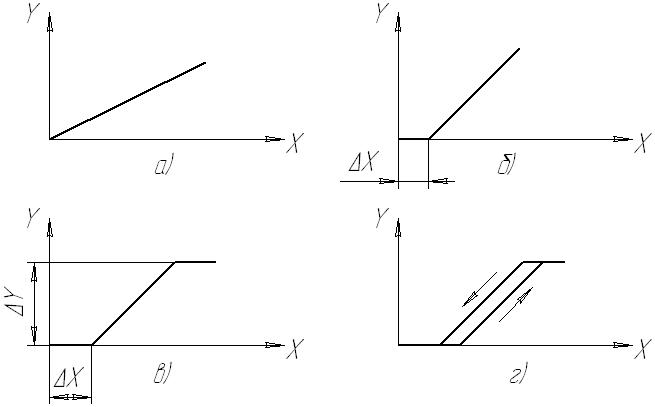
Х-вход Y-выход
а) выходная величин пропорциональна установившемуся значению входной величины.
Б) датчик с зоной нечувствительности
в) датчик с зоной нечувствительности и насыщением выхода
г) датчик с зоной нечувствительности на входе, с насыщением на выходе и с петлей гистерезиса
Гстерезисом называется различие между характером соответствия выходной величины входной при прямом и обратном ходе изменения входной величины.
Нелинейные статические характеристики датчиков

в) Идеализированная релейная статическая характеристика
г) релейная статическая характеристика с гистерезисом
16. Резистивные датчики. Электроконтактные датчики
Строятся на основе электроконтактных преобразователей, которые преобразуют механическое перемещение в замкнутое или разомкнутое состояние контактов, управляющих электрической цепью.
В начале обработки детали, когда ее размер наибольший, измерительный шток контрольного устройства находится в крайнем (верхнем) положении. Первая пара из заранее настроенных контактов замкнута. По мере уменьшения контролируемого размера обрабатываемой детали измерительный шток преобразователя перемещается и коромысло начинает поворачиваться. Первая пара контактов размыкается, вследствие чего формируется и подается команда на изменение режима работы, например на переход от черновой к чистовой обработке. При дальнейшем снятии припуска (уже при чистовой обработке) измерительный шток продолжает перемещаться, а коромысло поворачиваться, пока вторая пара заранее настроенных контактов не замкнется. Это значит, что заданный размер достигнут, и обработка останавливается.
Пневмоэлектроконтактные датчики
Для бесконтактного точного измерения размеров. Принцип действия основан на измерении сопротивления истечению воздуха через калиброванное сопло, находящееся на том или ином расстоянии от поверхности. Это расстояние и является контролируемой величиной.
Если размер отверстия находится в пределах допуска, то давление воздуха в правом и левом коленах датчика примерно одинаково и датчик не подает никаких команд.
Если диаметр отверстия меньше заданного, то зазор между калибром-пробкой и отверстием сопла будет маленьким и давление в правом колене датчика возрастет От датчика тогда последует дискретный сигнал «Размер занижен».
Если же отверстие получилось больше заданного, давление в правом колене датчика станет меньше, чем в левом, левый сильфон растянется, а правый сильфон сожмется. От датчика тогда последует дискретный сигнал «Размер завышен».
Реостатные датчики и контактные датчики сопротивления
Реостатными датчиками называются датчики, которые строятся на основе преобразователей, представляющих собой реостат, движок которого движется под действием измеряемой неэлектрической величины. Входной величиной является при этом механическое перемещение движка, а выходной величиной — изменение сопротивления.
Датчиками, омическое сопротивление которых изменяется под действием силовых факторов, являются также контактные датчики сопротивления. Принцип действия используемых для построения таких датчиков преобразователей основан на изменении под действием механического давления электрического сопротивления между проводящими элементами, разделенными слоями из плохо проводящего материала.
Примером электроконтактного датчика сопротивления является обычный угольный микрофон, преобразующий колебания акустического давления в колебания электрического сопротивления, которые далее преобразуются в колебания электрического сигнала.
Тензодатчики (тензорезисторы)
В основе работы тензорезисторов лежит явление тензоэффекта, заключающееся в изменении сопротивления проводников и полупроводников при их механической деформации. Тензорезисторы бывают разных размеров, и их минимальная длина равняется примерно 0,025 см.
Тензорезисторы закрепляются на поверхности исследуемого образца или монтируются в материал, деформация которого измеряется. Они способны измерять деформации порядка 1 мкм.
Тензорезисторы могут быть трех различных типов: проволочные, фольговые и полупроводниковые. Проволочные тензодатчики могут быть наклеиваемыми и ненаклеиваемыми, а полупроводниковые — наклеиваемыми или диффузионными.
Терморезисторы, термопары и магниторезистивные датчики
Терморезисторы — это разновидности параметрических резистивных датчиков, меняющие свое сопротивление в соответствии с изменением измеряемой температуры.
Терморезисторы бывают двух разновидностей: полупроводниковые и металлические.
Существует два способа измерения температуры с помощью терморезисторов:
Температура определяется окружающей средой.
2. Температура определяется условиями охлаждения терморезистора, нагреваемого постоянным по величине током. Такая схема применяется, например, для построения датчиков потока жидкости или газа, теплопроводности окружающей среды, плотности окружающего газа .
17. Пьезоэлектрические датчики
Физические явления при пьезоэффекте
Механическое воздействие, приложенное определенным образом к пьезоэлектрическому кристаллу, порождает в нем электрическое напряжение. Это явление называется прямым пьезоэффектом. И наоборот, электрическое напряжение, приложенное к пьезоэлектрическому кристаллу, вызывает его механическую деформацию, что представляет собой обратный пьезоэффект.
Пьезоэффект обладает знакочувствительностью. Пьезоэлектричество наблюдается как в монокристаллических материалах, например в кварце, турмалине, ниобате лития, сегнетовой соли и др., так и в поликристаллических материалах, например в титанате бария, титанате свинца, цирконате свинца и др.
Физические явления, происходящие при пьезоэлектрическом эффекте, рассмотрим на примере широко известного пьезокристаллического материала — кварца, как показано на рис. 1.
Чтобы получить хорошие пьезоэлектрические свойства, кварцевые кристаллы следует точно ориентировать. Природные формы кристаллов также ограничиваются простейшими конфигурациями, например пластинками или дисками.
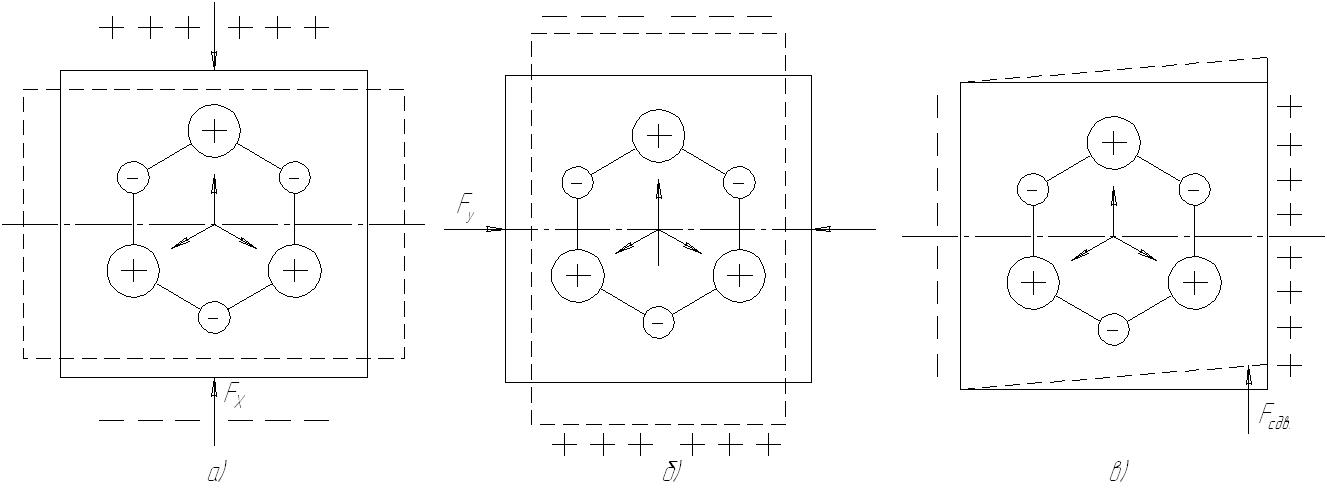
Рис. 1. Схемы продольного (а) и поперечного (б) сжатия и сдвига (в) в кристалле кварца
Деформация ячейки не влияет на электрическое состояние вдоль оси Y. Здесь сумма поляризационных векторов в силу симметрии равна нулю.
Образование поляризационных зарядов на гранях, перпендикулярных оси X, под воздействием силы, направленной по этой оси X, называется продольным пьезоэффектом.
Эффект образования электрических зарядов на гранях, перпендикулярных механически нагружаемым, называется поперечным пьезоэффектом.
При равномерном нагружении кристалла со всех сторон (например, при гидростатическом сжатии) кристалл кварца остается электрически нейтральным. Кристалл кварца остается также электрически нейтральным при механическом нагружении, действующем вдоль оси Z, перпендикулярной осям X и Y. Эта ось называется оптической осью кристалла.
При механическом воздействии сдвига, как показано на рис. 1, в, геометрическая сумма проекций векторов Р>2> и Р>3 >на ось X оказывается равной третьему вектору направленному вдоль оси X, и на гранях, перпендикулярных оси X, поляризационных зарядов не возникает. Однако проекции векторов Р>2> и Р>3> на ось Y между собой не равны, и на гранях, перпендикулярных оси У, возникает заряд.
Кроме естественных кристаллов, подобных кварцу или турмалину, для получения пьезоэффекта может быть использована также и пьезокерамика.
Конструктивные принципы построения пьезодатчиков
Достоинствами пьезоэлектрических преобразователей являются их малые габариты, надежность в работе, простота конструкции, возможность измерения переменных, в том числе высокочастотных, величин, очень высокая точность преобразования механических напряжений в электрический сигнал.
18. Эффект Холла и его использование для построения датчиков
Преобразователь, использующий эффект Холла, является преобразователем, базирующимся на магнитных эффектах, и применяется для измерения напряженности магнитного поля. Эффект Холла в разной степени имеет место у всех материалов. Сущность эффекта Холла показана на рис. 3.
Если пластина полупроводника единичной толщины помещается в магнитное поле с напряженностью В, а вдоль нее течет ток величиной I и при этом вектор напряженности электрического поля составляет прямой угол с вектором напряженности магнитного поля, то на движущиеся внутри этой полупроводниковой пластины носители заряда (электроны и ионы), образующие электрический ток, будет действовать сила, направленная вдоль плоскости их движения и перпендикулярная вектору напряженности магнитного поля. Это значит, что движение носителей заряда будет отклоняться от прямолинейного и на боковых гранях пластины возникнет разность потенциалов U>o>, определяемая выражением:
U>0>=K>H>IB

Рис. 3. Эффекта Холла
С их помощью можно измерять угловые и линейные перемещения, электрические токи и др.
Рис. 4а – принципиальная конструктивная схема датчика давления на основе эффекта Холла.
При повышении давления Р постоянный магнит 2, размещенный на упругой мембране 1 датчика, перемещается относительно чувствительного элемента 3, основанного на эффекте Холла. В результате на обкладках датчика возникает выходное напряжение U>H> порядка 0,5 В, в определенных пределах пропорциональное входному перемещению. Линейная часть статической характеристики датчика показана на рис. 4б.

Рис. 4 Датчик давления, основанный на эффекте Холла
19. Емкостные преобразователи
Физические принципы построения емкостных преобразователей
Сущность работы емкостных измерительных преобразователей заключается в изменении под действием измеряемой физической величины их электрической емкости, что, в свою очередь, отражается на величине их входного сигнала.
Электрическая емкость конденсатора, образованного параллельными пластинами, определяется по формуле
С=ε>o>ε>n>(n-1)(A/a)
где n-число пластин; A - площадь одной стороны пластины; d — толщина диэлектрика, расположенного между пластинами; ε>0>, - относительная диэлектрическая проницаемость этого диэлектрика; ε>n>> >- диэлектрическая проницаемость вакуума, т.е. вполне определенная константа.
Для измерений смещений менее 1 мм применяют емкостные преобразователи с изменяющимся расстоянием между пластинами. Для измерения смещений, превышающих 1 мм, чаще всего используются преобразователи с изменяющейся площадью перекрытия пластин.
Емкостные преобразователи могут быть использованы как для статических, так и для динамических измерений, но применяются главным образом в стационарных условиях для проведения стендовых исследований и прецизионных измерений физических величин.
Конструктивные принципы построения емкостных датчиков механических величин
Емкостные датчики широко применяются для измерения таких механических величин как вибрации, перемещения, скорости, ускорения, усилия, крутящие моменты и давление.
Распространенным устройством, преобразующим акустические колебания окружающей воздушной среды в соответствующие электрические сигналы, является емкостный микрофон рис. 6.

Рис. 6. Конструктивная схема емкостного микрофона
Конструктивная схема емкостного микрофона, который содержит размещенные в корпусе 1 мембрану 2 из электропроводящего материала, неподвижную пластину 3, установленную на диэлектрике 4, и демпфирующий слой 5. При изменении акустического давления мембрана 2 деформируется и изменяется ее расстояние до пластины 3. В результате происходит изменение электрической емкости микрофона, что и используется.
Конструктивные принципы построения емкостных датчиков уровня жидкости
Различают два случая: когда жидкость, уровень которой измеряется и регулируется, является диэлектриком и когда эта жидкость является проводником.
На рис. 10 изображена конструктивная схема измерения уровня жидкости, являющейся диэлектриком, с помощью емкостного преобразователя.
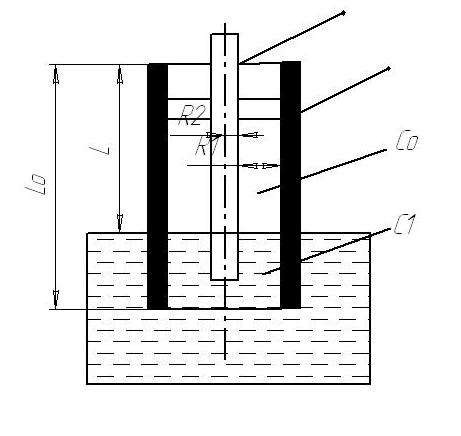
Рис. 10. Конструктивная схема емкостного измерения уровня жидкости-диэлектрика
Конструктивные принципы построения емкостных датчиков параметров среды
Емкостные датчики широко применяются для измерения различных параметров окружающей среды. Одним из самых важных параметров такого рода является давление жидкости или газа.
20. Оптоэлектронные преобразователи
Основные свойства оптического излучения
Оптоэлектроника сочетает в себе оптические и электронные методы измерений. На основе оптоэлектронных преобразователей созданы датчики давления, силы, перемещения, скорости, акустических параметров, напряженности электрического и магнитного полей.
Оптическое излучение представляет собой электромагнитные волны в диапазоне длин волн от 0,001 до 1000 мкм. Этот диапазон длин волн принято делить на три поддиапазона — ультрафиолетовую область, область видимого света и область инфракрасного излучения.
Для описания оптических явлений используются три системы величин: энергетическая, световая и квантовая.
Одночастотный поток называют монохроматическим.
Если волны отдельных излучений, из которых состоит поток, находятся в одной и той же фазе по отношению друг к другу, то такой поток называют когерентным.
Когда световой поток проходит через границу раздела двух сред, то его направление меняется, происходит так называемое преломление света
Существует два основных метода измерения параметров оптического излучения: метод радиометрии и метод фотометрии.
Метод радиометрии позволяет определять энергию оптического излучения путем ее поглощения и преобразования в соответствующем датчике с последующим определением изменения температуры.
Метод фотометрии основан на зрительном ощущении изменений видимого света, и основным чувствительным элементом в этом случае является человеческий глаз.
Источники и приемники излучения
Естественным источником светового излучения является солнце. Широко применяются лампы накаливания с вольфрамовой нитью.
В настоящее время все более широкое применение получают лазерные источники излучения. Лазеры бывают газовыми, твердотельными и полупроводниковыми. Наибольшее распространение получили газовые лазеры, характеризующиеся монохроматичностью и поляризованностью излучаемого ими когерентного света.
Приемники излучения можно разделить на две группы: интегральные и селективные. К интегральным относятся приемники излучения, базирующиеся на преобразовании энергии излучения в температуру независимо от длины его волны. К селективным относятся фотоэлектрические преобразователи, настраиваемые на ту или иную определенную длину волны излучения. К ним относятся преобразователи, использующие явления внутреннего и внешнего фотоэффекта: фоторезисторы, фотодиоды, вакуумные и газонаполненные фотоэлементы, фотоумножители и т.п.
Существуют приемники излучения, выполненные в виде полоски из двух различных металлов, образующих термопару. Существуют также приемники излучения, выполненные в виде полоски или стержня из металла или полупроводника, который изменяет свое сопротивление в зависимости от температуры (болометр).
Волоконная оптика
В качестве источников света чаще всего используют светодиоды и полупроводниковые лазеры, а в качестве приемников — полупроводниковые фотодиоды.
В основе передачи светового сигнала по оптическому волокну лежит явление полного внутреннего отражения.
Основные конструктивные схемы оптоэлектронных преобразователей
В механообрабатывающем производстве и в соответствующих исследованиях наиболее удобно применять амплитудную модуляцию оптического излучения.
Может быть осуществлена за счет:
• ослабления светового сигнала в среде при изменении коэффициента поглощения;
• изменения поперечного сечения оптического канала;
• генерации дополнительного излучения при воздействии измеряемого физического фактора;
• изменения отражательной или поглощательной способности при изменении показателя преломления или при нарушении полного внутреннего отражения.
В автоматизированном производстве контроль качества обработанной поверхности осуществляется с помощью датчиков шероховатости, принцип действия которых основан на рассеянии светового луча.
Оптические методы довольно широко используются для измерения давлений. Схема приведена на рис. 6. Между светодиодом 7 и двумя фотоприемниками 2 и 3 размещена шторка 4, перекрывающая поток излучения, который падает на один из фотоприемников 2 или 3. Шторка 4 жестко установлена на эластичной мембране 5, воспринимающей измеряемое давление. Для того чтобы произвести перекрытие светового потока между светодиодом 1 и фотоприемниками 2 и 3, достаточно перемещения шторки 4 на доли миллиметра.
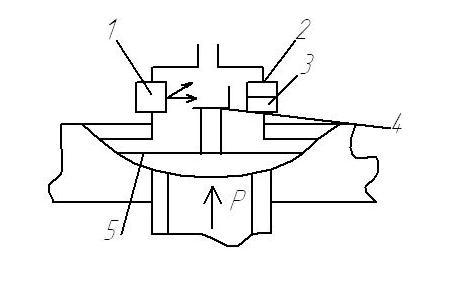
Рис. 6. Схема простейшего оптического датчика давления
Общим недостатком названного способа оптического измерения скорости потока является то, что, будучи помещенными в поток жидкости, датчики вызывают возмущения этого потока. Подобных искажений удается избежать, применяя бесконтактные методы измерений, основанные на использовании лазера (применяя так называемые лазерные анемометры).
Суть лазерных методов состоит в том, что луч лазера разделяется в полупрозрачном зеркале на два луча, которые фокусируются в одной точке в пределах прозрачного участка трубопровода. Пройдя через жидкость, рассеянный ею свет попадает на фотоумножитель, где преобразуется в напряжение, пропорциональное измеряемому расходу жидкости.
21. Электромагнитные преобразователи
Основные принципы работы
Электромагнитные преобразователи представляют собой один или несколько контуров, по которым могут протекать электрические токи, находящиеся в магнитном поле.
Электромагнитные преобразователи характеризуются такими параметрами как величина и направление токов, протекающих через контур, потокосцепление и индуктивность. Выходной величиной для таких преобразователей могут быть индуктивность, электромагнитная сила и индуктируемая в контуре ЭДС.
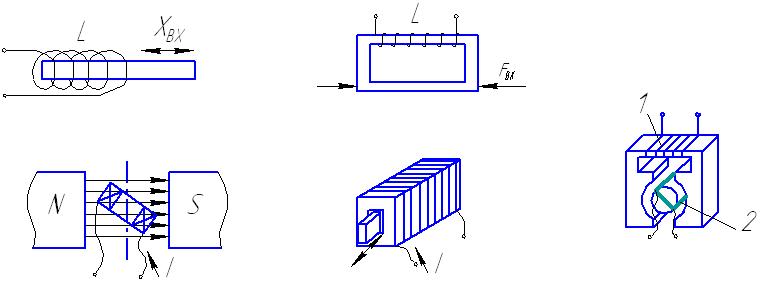
Рис. 1. Схемы электромагнитных преобразователей
Рис. 1а – принципиальная схема индуктивного преобразователя с ферромагнитным сердечником. Индуктивность L зависит от положения сердечника, что и является входной величиной датчика. Преобразователи, выходная величина которых зависит от внешнего магнитного поля, называются магнитомодуляционными.
Рис. 1б - принципиальная схема магнитоупругого преобразователя. Под действием приложенной силы происходит деформация ферромагнитного сердечника, в результате чего изменяется его магнитная проницаемость. Такие преобразователи часто используются для измерения сил и давлений.
Рис. 1в – такие преобразователи называются магнитоэлектрическими и используются в измерительных системах электромеханических приборов.
Рис. 1г - ферромагнитный сердечник втягивается в контур (катушку) с током таким образом, чтобы индуктивность контура была минимальной. Сила втягивания при этом пропорциональна квадрату силы тока. Такие преобразователи используются в электромагнитных измерительных приборах.
Рис. 1д - показано, как применяют ферромагнитные магнитопроводы, чтобы усилить электромагнитное поле и сконцентрировать его в определенной области. Через обмотку 1 проходит переменный ток, а в рамке 2 наводится ЭДС, величина которой зависит от угла поворота этой рамки.
В промышленности применяют индуктивные преобразователи с переменной величиной зазора (для измерения перемещений от долей микрона до нескольких миллиметров), с переменной площадью зазора (для измерения перемещений до 15...20 мм) и с подвижным цилиндрическим сердечником (индуктивные преобразователи соленоидного типа для измерения перемещений до 2000 мм).
Существуют также индуктивные преобразователи трансформаторного типа. Такие преобразователи представляют собой устройства, в которых входное перемещение изменяет величину индуктивной связи между двумя системами обмоток, из которых одна питается базовым переменным током, а с другой снимается выходной сигнал.
Такой преобразователь нашел широкое применение для измерения деформаций и усилий.
Положительным качеством индуктивных преобразователей является то, что они имеют большой по мощности сигнал на выходе и могут использоваться без усилителя. Индуктивные преобразователи широко используются в устройствах активного контроля размеров обрабатываемой детали, особенно при чистовых методах обработки.
Вихретоковые и магнитоупругие преобразователи
Принцип действия вихретоковых преобразователей заключается в изменении индуктивности и взаимоиндуктивности катушек при приближении к ним проводящего тела.
Существует три типа вихретоковых преобразователей:
накладные (рис. 3а);
экранные (рис. 3б);
щелевые (рис. 3в).
Вихретоковый преобразователь состоит из катушки, магнитное поле которой искажается при приближении проводящей пластины или проводящего покрытия.
Подобные преобразователи используются для контроля линейных размеров и толщины тонких пластин и покрытий, а также для обнаружения внутренних дефектов и всякого рода трещин, отслоений, царапин и раковин.
Для вихретоковых преобразователей характерны относительно низкая чувствительность и наличие погрешностей, обусловленных изменениями электрических свойств проводящего тела.
Для построения датчиков неэлектрических величин в машиностроении также используется физическое явление изменения магнитной проницаемости ферромагнитных тел под действием приложенной к ним механической нагрузки (растяжение, сжатие, изгиб, кручение). На этом основано построение так называемых магнитоупругих преобразователей.
Магнитоупругие материалы характеризуются относительной упругой чувствительностью S, которая равна
S>μ>=(Δ/μ)/δ
где Δ/μ — относительное приращение магнитной проницаемости; δ — механическое напряжение в ферромагнитном материале, вызвавшее данное приращение магнитной проницаемости.
Все магнитоупругие преобразователи делятся на две группы.
К первой группе относятся преобразователи, в которых измеряется магнитная проницаемость чувствительного элемента в одном направлении.
В преобразователях второй группы измеряется изменение магнитной проницаемости, происходящее сразу в двух взаимно перпендикулярных направлениях.
Магнитоупругие преобразователи используются для измерения сил, давлений, крутящих моментов. Обладают высокой надежностью, так как не содержат подвижных частей и могут измерять как статические, так и динамические нагрузки.
Вращающиеся трансформаторы и резольверы, линейные и круговые индуктосины
Устройством, служащим для преобразования угла поворота одной катушки по отношению к другой в сдвиг фазы одного переменного синусоидального напряжения по отношению к фазе другого переменного синусоидального напряжения такой же частоты, является так называемый вращающийся трансформатор.
Вращающийся трансформатор представляет собой индукционную микромашину по типу двухфазного асинхронного двигателя с фазным ротором. Синусно-косинусный вращающийся трансформатор называется также резолъвером.
Другим распространенным типом датчиков, используемых для измерения программируемых координатных перемещений в станках с ЧПУ, являются так называемые линейные и круговые индуктосины.
Линейный индуктосин состоит из двух шкал, одна из которых устанавливается на подвижном, а другая на неподвижном узлах станка.