Электропривод механизма выдвижения руки манипулятора
Содержание
1. Введение
2. Выбор оптимальной системы электропривода
3. Выбор передаточного механизма и расчет мощности электродвигателя
4. Моделирование режимов работы электропривода и процессов управления
5. Разработка электрической схемы
6. Разработка конструкции
7. Методика настройки привода
8. Заключение
9. Список литературы
Введение
Промышленные роботы и построенные на их основе роботизированные комплексы являются перспективным средством комплексной автоматизации производственных процессов. Применение роботов позволяет существенно повысить производительность труда, эффективность действующего и вновь проектируемого оборудования, а также избавить человека от монотонных, физически тяжёлых и вредных для здоровья работ.
Роботы могут перемещать объект манипулирования с заданной скоростью по сложным пространственным траекториям. Их можно легко перенастраивать и перепрограммировать. Благодаря этим свойствам роботы успешно используют для гибкой автоматизации процессов сварки [9], окраски, сборки, обслуживания в общем, комплексе различного технологического и транспортного оборудования. В последнее время в связи с задачами комплексной автоматизации производства и освоение новых областей деятельности человека (под водой, в опасных средах, в космосе ) большое внимание уделяется автоматизации операций манипулирования- перемещение и ориентации изделий и инструмента.
Манипуляторы при свободном перемещении рабочего органа представляют собой пространственный механизм с разомкнутой кинематической цепью. Его звенья связаны кинематическими парами пятого класса (вращательными или поступательными), оснащёнными приводами. Каждая такая кинематическая пара с приводом обеспечивает одну степень подвижности манипулятора. Число, вид и взаимное расположение степеней подвижности определяют манипуляционные возможности устройства.
Для автоматизации повторяющихся операций манипуляторы снабжаются системой программного управления. Манипуляторы с малым количеством степеней подвижности (n=1…3), работающие по жёсткой программе, называют автооператорами. Однако эти признаки условны, так как любое автоматическое устройство обычно предусматривает возможность перенастройки, в том числе замену механического программоносителя- кулачка, для старых моделей манипуляторов. Свободно программируемые автоматические манипуляторы с большим числом степеней подвижности (n=5…6), используемые в промышленном производстве, называют промышленными роботами.
Выбор оптимальной системы электропривода
В промышленных роботах и манипуляторах применяются пневматические, гидравлические, электрические приводы.
Электрические
приводы стали значительно шире
использоваться в последние годы в связи
с успехами электромеханики и вычислительной
техники (в системах управления). Сейчас
40…50% выпускаемых промышленных роботов
имеют электроприводы. Они используются
в основном в промышленных роботах при
средней [7] грузоподъемности и большом
числе степеней подвижности (3…6). Точность
позиционирования этих приводов большая,
чем в других приводах (до
 мм
и точнее) за счёт использования систем
управления с обратными связями.
Преимуществами электропривода являются
более высокая по сравнению с другими
типами приводов экономичность, более
высокий КПД, удобство сборки, хорошие
регулировочные свойства. Они применяются
как в позиционном так и в контурном
режимах работы.
мм
и точнее) за счёт использования систем
управления с обратными связями.
Преимуществами электропривода являются
более высокая по сравнению с другими
типами приводов экономичность, более
высокий КПД, удобство сборки, хорошие
регулировочные свойства. Они применяются
как в позиционном так и в контурном
режимах работы.
В электроприводе промышленных роботов с контурным управлением широко применяются двигатели постоянного тока ДПТ и вентильные двигатели. Применение ДПТ обусловлено [6] удобством и простотой регулирования скорости и момента. Для подобных целей они используются уже давно (например, в санках с ЧПУ), поэтому основные узлы схем управления достаточно хорошо отработаны, имеются типовые решения, обслуживающий персонал на предприятиях подготовлен к эксплуатации таких приводов. Однако в настоящее время появились комплектные электроприводы, классифицируемые как сервоприводы, где применяются гибридные шаговые двигатели.
По мере расширения областей применения шагового двигателя улучшались и его технические характеристики. Появились новые конструкции ШД с использованием редкоземельных магнитов, так называемые гибридные ШД, которые по стоимости, на сегодняшний день, приблизились к своим предшественникам, а по развиваемой мощности превосходят последних в несколько раз. В результате у ШД появилось дополнительное конкурентное преимущество - это высокий момент на малых оборотах вращения. Например, момент удержания ШД в 2-3 раза выше, чем у синхронного двигателя эквивалентных массогабаритных показателей. Поэтому использование ШД в ряде случаев позволяет исключить редуктор из механической системы и, следовательно, снизить себестоимость автоматической системы в целом.
Совершенствование методов управления позволило свести к минимуму отрицательные качества, присущие ШД.
Проблему пропуска шагов наиболее эффективно можно решить за счет внедрения в привод датчика позиции и использования высокопроизводительного сигнального процессора. Причем, во избежание значительного увеличения стоимости привода, возможным решением является разработка мехатронного привода на базе ШД, представляющего собой интегрированное устройство, в состав которого входит сам двигатель, система управления и датчик позиции вала. В этом случае в качестве датчика можно использовать бескорпусные ОЕМ-датчики.
При наличии двух таких компонент как сигнальный процессор и датчик позиции в одном устройстве можно отказаться от использования шаговых методов управления и построить систему управления на основе алгоритма векторного управления. Данный метод уже давно используется в сервоприводах на базе синхронных и асинхронных двигателей.
Алгоритм векторного управления основан на поддержании угла 90 градусов между текущей позицией ротора в рамках одного полюса и вектором токов в обмотках двигателя.
Как видно из графика зависимости момента от угла между текущей позицией и вектором тока максимальная эффективность достигается именно при угле 90 градусов.
При этом расчет текущего угла необходимо выполнять в реальном времени с высокой частотой, так как при формировании токов вал ротора всегда стремится в позицию, заданную вектором токов.
Такой способ обеспечивает высокую эффективность управления: исключается колебание момента, развиваемого двигателем и, как следствие - вибрация; обеспечиваются высокие динамические показатели; исключается пропуск шагов.
Помимо основного функционала, наличие на «борту» сервопривода современного сигнального процессора позволяет реализовать в рамках системы управления множество дополнительных функций, таких как:
- Программируемый логический контроллер.
- Интерполятор.
- Электронный редуктор.
- Обработка концевых датчиков.
- Контроль температуры.
- Защита от КЗ.
- Защита от пониженного и повышенного напряжения питания.
- Торможение с регулированием вырабатываемого противо ЭДС.
Наличие перечисленных функций позволяет увеличить надежность системы, снизить износостойкость оборудования, а в ряде случаев исключить внешний контроллер управления движением.
Использование передовых методов управления делает возможным применение шаговых двигателей в современных сервосистемах наряду с сервоприводами на базе синхронных и асинхронных двигателей. В свою очередь, использование мехатронного подхода обеспечивает снижение себестоимости такого привода до приемлемых значений, что традиционно свойственно шаговым приводам.
Выбор передаточного механизма и расчет мощности электродвигателя
Прежде, чем выбрать двигатель необходимо рассмотреть сам манипулятор, и привести необходимые параметры к валу двигателя.
Манипуляторы – технические устройства для воспроизведения некоторых двигательных функций рук человека.
Для механизма выдвижения руки манипулятора выбираем шарико-винтовую передачу. Даная передача обеспечивает достаточно высокий коэффициент полезного действия(до 0,9), имеет большой ресурс и малые габариты.
По предоставленным методикам, предоставленным фирмой «SBC Linear Co» выбираем параметры передачи:
- диаметр винта d>В>=32 мм;
- шаг винта t>В>=10 мм;
- длина винта L>В>=1,1 м.
Для данного механизма скорость гайки:
 ,
,
где t>B> – шаг винта(мм), n>B> – частота вращения винта(об/мин).
Частота вращения винта:

Найдем массу
винта, учитывая, что плотность стали
 :
:

Передаточное число механизма:

Момент инерции винта:
 ;
;
Момент инерции поступательно движущейся руки:
 ;
;
Суммарный момент инерции механизма:
 ;
;
Представим тахограмму перемещений для механизма:

Рис.1. Тахограмма перемещений
Максимально перемещение при максимальной скорости:
 ,
,
где S –пройденный путь.
Время движения при максимальном перемещении:

Тогда время разгона и время торможения:

Таким образом максимальное угловое ускорение равно:

Линейное ускорение механизма соответственно:

Определим нагрузки, действующие на вал двигателя:
- статическая нагрузка:
 ;
;
- динамическая нагрузка:
 ;
;
- центробежная нагрузка:
 .
.
Суммарный момент сопротивления на валу двигателя, соответствующий наиболее нагруженному режиму работы:
 ;
;
Выбираем интегрированный шаговый сервопривод фирмы ЗАО «Сервотехника» СПШ20-23017 со следующими параметрами(табл.1):
Таблица 1
-
Параметр
Значение
Выходная мощность, Вт
70
Момент удержания, Нм
1,8
Номинальный ток, А
3
Напряжение питания блока управления, В
15
Напряжение питания силовой части, В
24-85
Момент инерции вала ротора, кг•см2
0,4
Разрешение энкодера, имп./об.
2500
Наличие нулевой метки
Да
Допустимая эксплуатационная температура
окружающей среды, °С
-20…+50
Температура хранения, °С
-40…+50
Исполнение
IP54
Типоразмер
NEMA23
Масса, кг
2

Рис.2 Механическая характеристика СПШ20-23017 при различный значениях питающего напряжения.
Интегрированный сервопривод СПШ объединяет в одном компактном корпусе все необходимое для обеспечения управления движением ротора шагового двигателя в различных режимах работы.
Гибкая система настройки и встроенный контроллер позволяют использовать разработанные «Сервотехникой» сервоприводы в различных областях, а благодаря стандартным фланцам NEMA и компактным размерам СПШ может быть использован и при модернизации оборудования.
Конструктивно сервопривод СПШ можно разделить на следующие основные блоки:
- гибридный шаговый двигатель с габаритами NEMA 23 и 34;
- преобразователь частоты на основе высокопроизводительного DSP процессора;
- блок управления (сервоконтроллер и программируемый логический контроллер в одном корпусе);
- датчик позиции вала мотора.
Преимущества сервопривода СПШ:
- бесшаговое (векторное) управление на основе адаптированного для шаговых двигателей алгоритма;
- высокие динамические показатели за счет использования замкнутых контуров регулирования токов в обмотках двигателя;
- использование замкнутых контуров скорости;
- низкая вибрация за счет динамически регулируемого усилия;
- продуманная конструкция и простой монтаж;
- компактные размеры и небольшая масса.
Особенности сервопривода:
- реализованы режимы управления угловой позицией, скоростью, моментом;
- в базовой прошивке доступен режим плавного разгона/торможения с исключением двух диапазонов резонансных частот;
- точность позиционирования от 6 угловых минут до 8 угловых секунд;
- встроенный программируемый логический контроллер, дающий пользователю возможность создавать программы движения привода без применения внешних контроллеров;
- возможен режим синхронизации работы группы приводов (до 128 приводов на базе промышленной шины CAN);
- реализован режим работы «master-slave»
- наличие интерфейса Step/Dir для задания позиции вала двигателя;
- аналоговый интерфейс ±10 В для задания скорости двигателя;
- блок управления имеет 2 цифровых выхода, 4 электрически развязанных цифровых входа;
- привод имеет встроенную защиту от короткого замыкания, перегрева, повышенного и пониженного напряжения;
- настройка системы управления СПШ может осуществляться по более чем 50 параметрам, что позволяет оптимизировать рабочие характеристики привода для решения каждой конкретной задачи;
- в сервоприводе реализован режим осциллографа, позволяющий с высоким разрешением анализировать качество переходных процессов в приводе.
Данный электропривод может работать в динамическом режиме, при этом управляющий сигнал от контроллера верхнего уровня передается через цифровой интерфейс в режиме реального времени. Динамический режим используется в системах, требующих контурного управления (например, в манипуляторах со сложной кинематикой и координатных столах для точного позиционирования).
Проверка выбранного двигателя по нагреву.
Пусть нагрузочная диаграмма двигателя имеет циклический характер, а момент в каждом цикле не остается неизменным, т.е. двигатель работает с переменной нагрузкой (режимы S6, S7 или S8).
Рассмотрим «далекий» цикл, в котором тепловые процессы в двигателе установились, т.е. температуры перегрева в начале и в конце цикла равны, а в течение цикла t изменяется около среднего уровня tср. Равенство температур перегрева в начале и конце цикла свидетельствует о том, что количество тепла, запасенное в двигателе к началу цикла, не отличается от количества тепла, запасенного в двигателе в конце цикла, т.е. тепло в двигателе не запасается.
В соответствии с документацией, представленной заводом-изготовителем КПД электропривода при моменте нагрузки М>н>=0,2 Нм, равен:
 ;
;
Номинальные потери двигателя:
 ;
;
Тепловые потери:
 ;
;
Потери в меди для номинального режима:
 ;
;
Механические потери принимаем равными 10% от номинальных:
 ;
;
Для электропривода
СПШ-10 потери в стали отсутствуют, так
как вращающиеся части не содержат
ферромагнитных материалов
 ;
;

Двигатель выбран правильно, если в процессе его эксплуатации соблюдается условие:
 ,
,
где
 -
допустимое превышение температуры для
изоляции двигателя, которое определяется
классом нагревостойкости изоляции.
-
допустимое превышение температуры для
изоляции двигателя, которое определяется
классом нагревостойкости изоляции.
 ;
;
Коэффициент теплоотдачи:
 Вт/°С;
Вт/°С;
Тогда:
 °С;
°С;
Для выбранного
двигателя предельная температура:
 °С,
допустимое превышение температуры для
изоляции двигателя:
°С,
допустимое превышение температуры для
изоляции двигателя:
 °С≥
°С≥ .
.
Как видно из расчётов, предельное превышение температуры двигателя за время работы ниже допустимого, значит двигатель не будет перегреваться.
4. Моделирование режимов работы электропривода и процессов управления
В качестве системы управления используется трёхконтурная система подчинённого регулирования с контурами тока, скорости, положения. Структурная схема представлена на рис.
Расчёт параметров структурной схемы
Вследствие малого значения постоянной времени контура тока, будем считать его безъинерционным звеном с коэффициентом передачи, равным:
 ;
;

Рис.3. Блок-схема рассматриваемой системы.
Контур скорости:
 -
коэффициент обратной связи по скорости;
-
коэффициент обратной связи по скорости;
Настроим контур скорости на технический оптимум:

Регулятор скорости представляет собой П-регулятор.
Контур положения:
Настроим контур положения на технический оптимум:

Регулятор положения представляет собой П-регулятор.
В соответствии с техническим заданием моделируемая система должна отрабатывать гармоническое задание с частотой 0…2 Гц с ошибкой позиционирования не более 1 мм
При f=1 Гц Ω = 2·π·f = 2·3,14·1=6,28 рад/с
Амплитуду задания выбираем опытным путём, для получения линейной скорости движения руки манипулятора не более 0,5 м/с. Была выбрана амплитуда, равная 24,5 рад.

Рис.4 Модель исследуемой системы в среде MatLab.
Результаты моделирования:

Рис.5. Зависимость
 и
и
 от времени t.
от времени t.

Рис.6. Зависимость угловой скорости ω электродвигателя от времени t.

Рис.7. Зависимость момента М электродвигателя от времени t.

Рис.8 Зависимость линейного перемещения L руки манипулятора от времени t.

Рис.9 Зависимость ошибки позиционирования от времени.
Таким образом, из результатов моделирования видно, что при отработке гармонического задания с частотой 2 Гц ошибка слежения ∆L=0,88 мм < 1 мм, что соответствует заданным требованиям.
5. Разработка электрической схемы
Согласно принципиальной электрической схеме в состав электропривода выдвижения руки манипулятора входят:
- интегрированные сервопривод СПШ20-23017;
- переключатель TR26-21C-11D1 (220В, 16А);
- разработанный блок питания.
Блок питания служит для обеспечения интегрированного сервопривода СПШ20-23017 стабилизированным силовым напряжением 80 В и стабилизированным напряжением цепи управления 15В. В его состав входят два преобразователя постоянного фирмы «Александер-Электрик»: DC/DC преобразователь МДМ10-Вт с выходным напряжение 15 В и DC/DC преобразователь MR100 с выходным напряжением 80 В. Также источник питания снащён ключом сброса энергии.
В режиме собственно двигателя, когда мощность источника питания расходуется на создание вращательного момента и в генераторном режиме, когда внешний вращательный момент наводит ЭДС на статорные обмотки и привод превращается в генератор постоянного тока. Переход в генераторный режим происходит всякий раз, когда контроллер сервопривода включает торможение, а инерция ротора и нагрузки заставляет его вращаться дальше. В результате чего накопительные конденсаторы начинают запасать электроэнергию. Кроме повышения КПД, наличие обратного тока направленного от привода в накопительные конденсаторы даёт возможность осуществлять торможение без рассеивания дополнительного тепла в обмотках и «тормозных» резисторах. Блок питания модели комплектуется тремя накопительными конденсаторами суммарной ёмкостью 3000 мкФ на 160 Вольт с максимальным током пульсаций 7.5 Ампер. Ресурс конденсаторов составляет 2000 часов при температуре 105°С.
В задачах требующих резких режимов торможениях сервоприводов и/или в условиях инерционной нагрузки возникают излишки энергии, которые могут превышать возможности накопительных конденсаторов, Для таких применений в состав блока питания включены специальные мощные «тормозные» резисторы и соответствующая схема управления. С помощью этой схемы излишки энергии преобразуются в тепло, которое рассеивается в «тормозных» резисторах. Схема управления «тормозными» резисторами состоит из компаратора «ОУ» и силового ключа на полевом транзисторе. Компаратор сравнивает напряжение пропорциональное силовому (делитель R1, R2) с предустановленным при настройке стабилизированным напряжением, поступающим с потенциометра RP1. Если значение силового напряжения превышает предустановленную величину, компаратор открывает силовой ключ и часть тока заряда накопительных конденсаторов перенаправляется на четыре мощных резистора (R3..R6), облегчая, тем самым, режим работы накопительных конденсаторов.
Отключение установки от питающего напряжения производится выключателем TR26-21C-11D1(220 В,16А).
6. Разработка конструкции
Для соединения элементов используем следующие кабели:
- для соединения блока питания и сервопривода – кабель марки СПОВЭ 4x1мм2, подключение с помощью клеммной колодки TB6-RC.
- для соединения блока питания и источника постоянного тока – кабель марки СПОВ 2x1мм2, подключение розеткой 216P6 фирмы «ABB».
- для содеинения электропривода с контроллером верхнего уровня используется кабель ELFA 55-790-08, для подключение используется розетка DB-9M.
Согласно
заданным климатическим условиям (УХЛ4)
по ГОСТ 15150 электропривод манипулятора
должен нормально работать при температуре
+1…+40
 и влажности 80% при 25
.
Электропривод СПШ20-23017 полностью
соответствует данным условиям.
и влажности 80% при 25
.
Электропривод СПШ20-23017 полностью
соответствует данным условиям.
Степень защиты оболочки для размещения блока питания выбираем по ГОСТ 14254-80: IP54 – относятся щиты защитные, шкафы напольные и навесные. Условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды, выбираются по ГОСТ 15543-70. Выбираем корпус фирмы «Rose» серии Multitronic. Габариты корпуса: с учетом габаритов элементов, входящих в состав блока питания. Высота 140 мм, ширина 200 мм, глубина 80 мм.
Корпус является навесным одностороннего обслуживания, односекционным. Корпус цельный, литой, выполнен из алюминия. Задняя стенка представляет собой монтажную панель для установки платы блока питания. В нижней части шкафа предусмотрена вводная кабельная панель, необходимая для вывода и вывода сетевых проводов.
Монтаж интегрированного сервопривода следует производить к плоской
металлической поверхности с центральным отверстием диаметром не менее
38,1±0,03 мм с помощью четырех шпилек или винтов М4.
Класс чистоты обработки монтажного места должен быть не ниже 1.6. Для снижения уровня вибраций и шума, а также при значительной шероховатости монтажной поверхности допускается применение полужесткой подвески с применением эластичной теплопроводной прокладки из силиконовой резины толщиной не более 1,5 мм.
При монтаже устройства следует обеспечить свободный доступ к интерфейсным и питающим разъемам. Соединительные кабели должны быть закреплены к неподвижным деталям конструкции так, чтобы исключить их случайное соприкосновение с подвижными частями и деталями механизма. При монтаже кабели не должны испытывать натяжение и нагрузки на разъемы. Они должны образовывать у разъемов небольшие петли без существенного провисания и колебаний в процессе работы механизма в сборе.
7. Методика настройки привода
Ниже приведена стандартная последовательность действий, которые необходимо совершить при настройке параметров СПШ10:
1. Выполнить подключение линий питания и интерфейсов в соответствии с описанием и схемой, приведенной в документе «Руководство пользователя».
2. Подать цифровое и силовое напряжения питания на СПШ10.
3. Подключить кабель USB к ПК.
4. Установить программное обеспечение Мотомастер© и драйвер виртуального COM-порта, находящиеся на CD-диске в соответствие с описанием, приведенном в документе «Руководство пользователя.pdf».
5. Запустить Мотомастер©.
6. Подключитесь к приводу.
7. Сделать экспорт параметров (резервное копирование). Это позволит быстро восстановить параметры привода после повреждения СПШ10 или в случае его замены.
Настройка контура скорости:
8. Перейти к вкладке «Статические параметры/Контур позиции».
9. Разомкнуть контур позиции.
10. Перейти к вкладке «Статические параметры/Контур скорости».
11. Замкнуть контур скорости.
12. Для анализа качества переходного процесса рекомендуется временно отключить режим плавного разгона, если это допускает механическая система, к которой подключается привод (параметр vp9 = «Режим с максимальной динамикой»).
13. Установить максимально допустимую скорость вращения, коэффициент
обратной связи и требуемое ускорение.
14. Перейти к вкладке «Параметры тестирования».
15. Установить параметр Tp1 в «Приращение скорости».
СПШ10 поддерживает тестовый режим, с помощью которого можно проанализировать качество переходных процессов в приводе. Эксперимент проводится
следующим образом:
1. Пользователь настраивает параметры теста.
2. Далее настраивает осциллограф и выполняет запуск эксперимента.
3. СПШ10 отрабатывает эксперимент и сохраняет 3000 выборок каждого пара-
метра (не более трех), с заданным интервалом.
4. СПШ10 передает сохраненные значения в Мотомастер©.

Описание: задает текущий тестовый режим:
1. Непрерывный режим — режим непрерывного сканирования заданных
координат.
2. Ступенька — приращение позиции на заданный шаг.
3. Синус — синусоидальное изменение позиции с заданными параметрами.
4. Приращение скорости.
5. Синусоидальное изменение скорости.
6. Параболическое изменение скорости.
7. Измерение без задания — в данном режиме задающее воздействие не вносится, происходит лишь сканирование требуемых координат в течение определенного времени.
16. Настроить параметры tp2, tp5, tp6.

Описание: параметр определяет, с какой частотой будет выполняться опрос требуемых параметров. Длительность всего эксперимента составляет Tp2•3000мксек.

Описание: если параметр Tp1=Ступенька/ Приращение скорости, то Tp5 определяет время после начала эксперимента, через которое будет выполнено приращение задающего воздействия.
Если параметр Tp1=Синус/ Синусоидальное изменение скорости, то Tp5 определяет амплитуду синусоидального задания контура позиции/скорости.
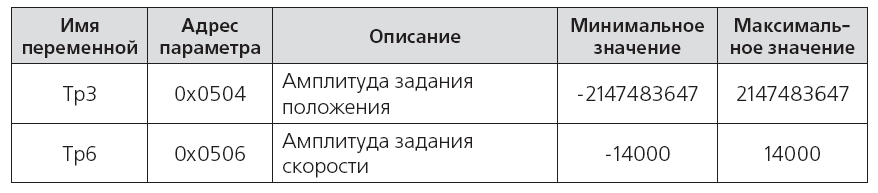
Описание: если параметр Tp1=Ступенька/ Приращение скорости, то Tp6 определяет приращение, которое будет добавлено к текущей позиции/скорости в момент проведения теста. Если параметр Tp1=Синус/ Синусоидальное изменение скорости, то Tp6 определяет амплитуду синусоидального задания контура позиции/скорости.
17. Перейти в окно осциллографа.
18. Выбрать каналы тестирования (не более трех). Например, текущая скорость вращения, заданный ток в роторной системе координат. При этом выставить множитель тока в 1000.
19. Выполнить запуск теста и дождаться отображения графиков на экране.
20. Проанализируйте качество переходного процесса.
21. Увеличьте значение параметра tp2, если эксперимент завершился прежде,
чем закончился переходный процесс.
22. Уменьшите значение параметра tp2, если разрешение графиков оказалось
слишком низкое.
23. При необходимости скорректируйте пропорциональный и интегральный
коэффициенты контура скорости и повторите эксперимент.
24. Установите значение vp9 в состояние «Режим плавного разгона/торможения».

Значение по умолчанию: 1.
Описание:
1. Режим плавного разгона/торможения. В данном состоянии внутренний интерполятор включен.
2. Режим с максимальной динамикой — без использования внутреннего интерполятора. В данном режиме вал двигателя выполняет разгон с максимальным ускорением. Данный режим используется, если привод работает под управлением системы управления верхнего уровня, которая реализует интерполяцию.
25. Установите требуемое значение ускорения.
26. Выполните анализ переходных процессов с новыми настройками.
27. Настройте параметр vp8 (Максимальная скорость вращения) в соответствие с максимальной рабочей нагрузкой на валу двигателя таким образом, чтобы скорость вращения вала достигала заданного значения в статическом режиме.

Значение по умолчанию: 4000 об/мин.
Описание: определяет максимальную скорость задания для замкнутого контура управления скоростью.
28.Настройте параметр vp6 в соответствие с требованиями системы по безопасности.

Значение по умолчанию: 5 секунд.
Описание: время, в течение которого скорость вала двигателя должна достигнуть заданного значения. Если скорость вала не достигла заданного значения, то происходит аварийный останов привода. При этом состояние привода переводится в «Останов по перегрузке».
29. При появлении резонансов в определенных диапазонах скоростей вращения выполните настройку vp10-vp13, которые позволяют исключить два диапазона скоростей из функции плавного разгона/торможения.


Значение по умолчанию: 0.
Описание: с помощью данных параметров можно задать 2 диапазона скоростей, которые будут исключаться из функции плавного разгона и торможения.
Если начало и конец диапазона равны, то диапазон не выбран.
Если начало диапазона меньше, чем конец, то диапазон выбран.
Настройка контура позиционирования:
30. Перейти к вкладке «Статические параметры/Контур положения».
31. Установите параметр «Состояние контура положения» в значение «Замкнут».
32. Установить минимальное значение pp1.

Значения по умолчанию: 5; 0.
Описание: коэффициенты ПИ регулятора контура положения.

Значение по умолчанию: 500.
Описание: предусмотрено несколько частот дискретизации, из которых пользователь может выбрать требуемую частоту дискретизации в зависимости от стоящей перед ним задачи.
33. Перейти к вкладке «Параметры тестирования».
34. Установить параметр Tp1 в «Ступенька».
35. Настроить параметры tp2, tp3, tp5.
36. Перейти в окно осциллографа.
37. Выбрать каналы тестирования (не более трех). При этом не допускается установка одновременно двух параметров «Заданное положение», «Текущее положение». Пример выбранных параметров: текущее положение, текущая скорость вращения, заданная скорость вращения.
38. Выполнить запуск теста и дождаться отображения графиков на экране.
39. Проанализируйте качество переходного процесса, при необходимости настроив смещение и множители.
40. При необходимости скорректируйте параметры pp1, pp2, pp3 и повторите эксперимент.
41. Перейти к вкладке «Статические параметры/Интерфейс».
42. Установите параметр «Источник опорного сигнала» в требуемое значение.

Значение по умолчанию: Интерфейс USB.
Описание: определяет интерфейс, по которому выполняется управление приводом.
Список возможных интерфейсов:
• 0: интерфейс USB;
• 2: интерфейс StepDir;
• 4: аналоговый интерфейс;
• 5: интерфейс CAN;
• 6: квадратурный интерфейс.
43. При выборе интерфейса Step/Dir выполните настройку параметра ip1.
44. При выборе аналогового интерфейса выполните настройку параметров ip1,ip6, ip12.
45. При выборе CAN интерфейса произвести настройку параметра ip9.

Значение по умолчанию: 0 (режим не выбран).
Описание:
СПШ10 поддерживает несколько режимов синхронизации по шине CAN:
• режим не выбран;
• режим ведущий. В этом режиме СПШ10 передает текущую позицию в качестве задающего воздействия для ведомого устройства, адрес которого в параметре Ip8;
• режим ведомый. В этом режиме СПШ10 отрабатывает задание по позиции, полученное от узла с адресом (Ip8);
• режим контурного управления. В этом режиме СПШ10 отрабатывает задание по скорости или позиции, полученное от узла с адресом (Ip8);
• синхронизация по команде SYNC. Данный режим аналогичен предыдущему.
Однако установка полученного задания выполняется только при получении команды синхронизации от системы верхнего уровня. Кроме этого, выполняется синхронизация контура скорости. Данный режим позволяет выполнить синхронизацию контуров управления нескольких приводов СПШ10.
Завершение настройки:
45. После выполнения настройки сделать экспорт параметров (резервное копирование). Это позволит быстро восстановить параметры привода после
повреждения СПШ10 или в случае его замены.
46. Выполните сброс контроллера, чтобы все параметры вступили в силу.
47. В течение первого времени штатной эксплуатации выполните анализ температурного режима. Для этого через 30, 60, 120, 360 минут оцените текущую температуру и обеспечьте требуемые условия эксплуатации в случае приближения температуры к указанной в параметре Ер5.

Значение по умолчанию: 70 °С.
8. Заключение
В рамках данного курсового проекта был спроектирован электропривод механизма выдвижения руки манипулятора. Выбранный сервопривод включает в себя сервоусилитель, серводвигатель, ПЛК и энкодер. Сервоусилитель при максимальной входной импульсной частоте и при разрешении энкодера 2000 имп/об обеспечивает высокоточное регулирование положения. Разработанный блок питания допускает колебания напряжения ±10% при устойчивой работе, что удовлетворяет условиям поставленной задачи. Выбранный серводвигатель выдерживает нагрузку, соответствующую перемещаемой массе 100 кг при максимальной скорости 0,5 м/с. Выдвижение руки манипулятора осуществляется при помощи шарико-винтового механизма.
Список литературы
Справочник по автоматизированному электроприводу/ Под ред. В.А. Елисеева, А.В. Шинянского. – М.: Энергоатомиздат, 1983. – 616 с.
Белов, М.П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: Учеб. для вузов/М.П. Белов, В.А. Новиков, Л.Н. Рассудов. – М.: Изд. центр «Академия», 2004. -578 с.
Ключев, В.И. Электропривод и автоматизация общепромышленных механизмов: Учеб. для вузов/ В.И. Ключев, В.М. Терехов. – М.: Энергия, 1980. – 358 с.
Сафонов, Ю.М. Электроприводы промышленных роботов/ Ю. М. Сафонов. – М.: Энергоатомиздат, 1990. – 176 с.
Бурдаков, С.Ф. Проектирование манипуляторов промышленных роботов и роботизированных комплексов/ С. Ф. Бурдаков, В.А. Дьяченко, А.Н. Тимофеев. – М.: Высшая школа, 1986. – 263 с.
Усатенько, С.Т. Выполнение электрических схем по ЕСКД: Справочник/ С. Т. Усатенько, Т.К. Каченюк, М. В. Терехова. – М.: Изд-во стандартов, 1990. – 325 с.
Александров, К.К. Электротехнические чертежи и схемы/ К. К. Александров, Е. Г. Кузьмина. – М.: Энергоатомиздат, 1990. – 288 с.
http://www.servotechnica.ru
www.avtomatika.info