Зависимость между деформациями и напряжениями при плоском и объемном напряженных состояниях
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛНЕКТРОНИКИ
Кафедра инженерной графики
РЕФЕРАТ на тему:
«ЗАВИСИМОСТЬ МЕЖДУ ДЕФОРМАЦИЯМИ И НАПРЯЖЕНИЯМИ ПРИ ПЛОСКОМ И ОБЪЕМНОМ НАПРЯЖЕННЫХ СОСТОЯНИЯХ»
МИНСК, 2008
Определим деформации ε>1> и ε>2> в направлениях главных напряжений при плоском напряженном состоянии (рис. 1). Для этого используем закон Гука для одноосного напряженного состояния, а также зависимость между продольной и поперечной деформациями и принцип независимости действия сил (принцип сложения деформаций).
От действия одного напряжения σ>1> относительное удлинение по вертикали равно

и одновременно в горизонтальном направлении относительное сужение равно


От действия одного только σ>2>
имели бы в горизонтальном направлении
удлинение
 и в вертикальном на-
и в вертикальном на-
правлении сужение Суммируя деформации, получаем:
Суммируя деформации, получаем:

 (1)
(1)
Эти формулы выражают обобщенный закон Гука для плоского напряженного состояния. Если известны деформации ε>1> и ε> 2>, то, решая уравнения [1] относительно напряжений σ>1> и σ>2>, получим следующие формулы:
 (2)
(2)
Аналогично для объемного (пространственного) напряженного состояния, когда все три главных напряжения σ>1>, σ>2 >и σ>3>отличны от нуля, получим:


 (3)
(3)
Уравнения (3) представляют собой обобщенный закон Гука для объемного напряженного состояния. Деформации ε>1>, ε>2> и ε>3> в направлении главных напряжений называются главными деформациями.
Зная ε>1>, ε>2> и ε>3>, можно вычислить изменение объема при деформации. Возьмем кубик 1x1x1 см. Объем его до деформации равен V>0> = 1 см3. Объем после деформации равен

(произведениями
 ,
как величинами, малыми по сравнению с
самими
,
.пренебрегаем).
,
как величинами, малыми по сравнению с
самими
,
.пренебрегаем).
Относительное изменение объема
>v>
 (4)
(4)
Подставив сюда значения ε>1>, ε>2> и ε>3 >из уравнений (2.40), получим
 (5)
(5)
Из формулы (5) следует, что коэффициент Пуассона μ не может быть больше 0,5. Действительно, при трехосном растяжении, очевидно, объем элемента уменьшиться не может, т. е. ε>v> положительно, а это возможно лишь при условии 1—2 μ≥0, так как главные напряжения в этом случае положительны (σ>1>≥σ>2>≥σ>3>>0).
Формулы [2] — [5] выражают зависимость не только между главными деформациями и напряжениями, но и между любыми (неглавными) значениями этих величин, т. е. они остаются справедливыми и тогда, когда на площадках действуют также касательные напряжения.
Это следует из того, что линейные деформации (в направлениях, перпендикулярных т) не зависят от касательных напряжений.
РАБОТА ВНЕШНИХ И ВНУТРЕННИХ СИЛ ПРИ РАСТЯЖЕНИИ (СЖАТИИ). ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ДЕФОРМАЦИИ
При растяжении (сжатии) внешние силы совершают работу вследствие перемещения точек их приложения (рис. 2, а).
Вычислим работу статически приложенной внешней силы, т. е. такой силы, величина которой растет в процессе деформации от нуля до своего конечного значения с весьма небольшой скоростью.

Элементарная работа dA внешней силы Р наперемещении dδ равна
 (6)
(6)
Но между δ и Р существует зависимость (закон Гука)
 ,
,
откуда

Подставляя это значение в формулу (2.43), получаем

Полную работу силы получим, интегрируя это выражение в пределах от нуля до окончательного значения перемещения δ>1>

Таким образом,
 (7)
(7)
т. е. работа внешней статически приложенной силы равна половине произведения окончательной величины силы на окончательную величину соответствующего перемещения.
Графически работа силы Р выражается (с учетом масштабов) площадью ОАВ диаграммы, построенной в координатах δ — Р (рис. 2, б).
Отметим, что работа силы Р>1>,
неизменной по величине, на
перемещении δ>1>,
равна
 т. е. в два раза больше, чем при статическом
действии.
т. е. в два раза больше, чем при статическом
действии.
При деформации совершают работу не только внешние силы, но и внутренние (силы упругости).
Работу внутренних сил при растяжении (сжатии) можно вычислить следующим образом.
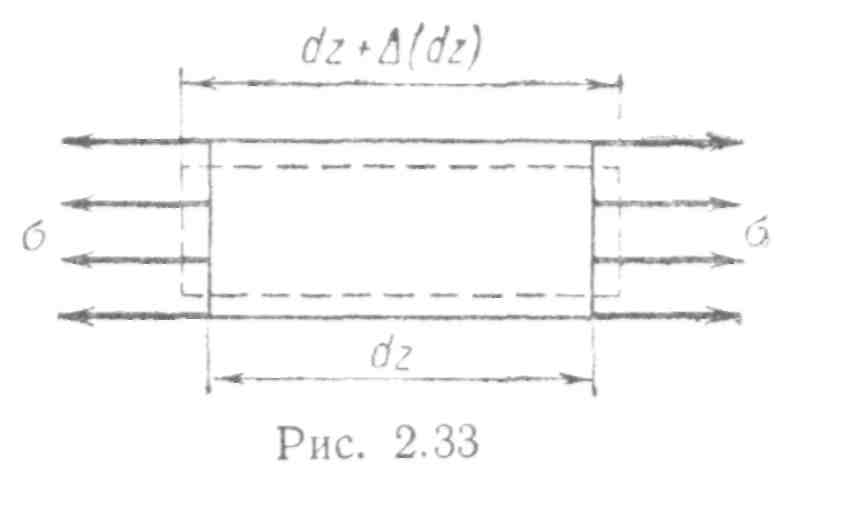
На рис. 3 показан элемент dz стержня, на который действуют нормальные напряжения σ, являющиеся для этого элемента внешними силами.
Внутренние силы, очевидно, будут направлены в противоположную сторону, т. е. в сторону, противоположную перемещению. Поэтому работа внутренних сил при нагружении всегда отрицательна.
Элементарная работа внутренних сил (для элемента dz) вычисляется по формуле, аналогичнойформуле [7]
 (8)
(8)
где N — внутреннее усилие (продольная сила);
Δ(dz) — удлинение элемента.
Но, согласно закону Гука, имеем

Следовательно,
 (9) рис. 3
(9) рис. 3
Полную работу внутренних сил получим, интегрируя обе части формулы по длине всего стержня l
 (10)
(10)
Если N, Е и F постоянны, то
где Δl
= δ = —
удлинение стержня.
—
удлинение стержня.
Величина, равная работе внутренних сил, но имеющая противоположный знак, называется потенциальной энергией деформации. Она представляет собой энергию, накапливаемую телом при деформации.
Таким образом, для стержня постоянного сечения при продольной силе, имеющей одно и то же значение во всех поперечных сечениях, потенциальная энергия при растяжении (сжатии) определяется по формуле
 (11)
(11)
Потенциальная энергия, отнесенная к единице объема материала, называется удельной потенциальной энергией:
или
 (так как σ=Еε),
(так как σ=Еε),
или
 (12)
(12)
При объемном напряженном состоянии удельная потенциальная энергия получится как сумма трех слагаемых (на основании принципа независимости действия сил)
 (13)
(13)
Используя обобщенный закон Гука, получаем
 (14)
(14)
Из этой формулы, как частный случай, полагая одно из главных напряжений равным нулю, легко получить формулу для плоского напряженного состояния.
СВОЙСТВА МЕХАНИЧЕСКОЙ ЭНЕРГИИ
Отметим два важных свойства механической энергии, которые широко используются в современных методах расчета конструкций при любых деформациях: растяжении, кручении, изгибе и т. д.
Закон сохранения механической энергии
При преобразовании энергии внешних сил в энергию внутренних сил и обратно имеет место закон сохранения энергии, который может быть сформулирован следующим образом:
Когда упругое тело (система) под влиянием какой-либо нагрузки переходит из недеформированного состояния в деформированное уравновешенное состояние, то суммарная работа, произведенная в этом процессе внешними и внутренними силами, равна нулю
A+W=0, (15)
где А — работа внешних сил (положительная при нагружении);
W — работа внутренних сил (отрицательная при нагружении). Учитывая, что W = — U уравнение [15] можно заменить равенством
A=U (16)
где U — потенциальная энергия деформации.
Этот закон сохраняет свою силу при медленном (статическом) нагружении и при упругих деформациях.
При динамическом нагружении и при появлении пластических деформаций часть энергии внешних сил преобразуется в кинетическую энергию движения тела, в электромагнитную, тепловую, и другие виды энергии.
Закон сохранения энергии предоставляет в наше распоряжение одно уравнение, пользуясь которым можно определить одно неизвестное, например, перемещение по направлению внешней силы, или неизвестное усилие в одном из стержней.
Закон минимума потенциальной энергии деформации (принцип наименьшей работы)
Широкое применение в расчетах конструкций имеет также следующий энергетический закон, называемый принципом наименьшей работы:
Действительное напряженное состояние равновесия упругого тела (системы) отличается от всех смежных состояний равновесия тем, что оно дает минимум потенциальной энергии деформации.
Поэтому если потенциальная энергия деформации зависит от неизвестных величин, например, усилий Х>ъ> Х>2> и т. д., то можно определить все эти неизвестныеиз условий минимума энергии

 … (17)
… (17)
Принцип наименьшей работы справедлив для линейно-деформируемых (т. е. подчиняющихся закону Гука) упругих тел и систем. Он предоставляет в наше распоряжение любое, нужное нам число уравнений (и при том, линейных) для определения искомых неизвестных величин.
В следующем параграфе показывается применение этого принципа к расчету простейших статически-неопределимых систем.
О других свойствах механической энергии будет сказано далее, в соответствующих местах курса.
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ ЗАДАЧИ ПРИ РАСТЯЖЕНИИ И СЖАТИИ
Имеется много конструкций, в элементах которых усилия не могут быть определены только из уравнений равновесия.
Такие конструкции (системы) называются статически неопределимыми.
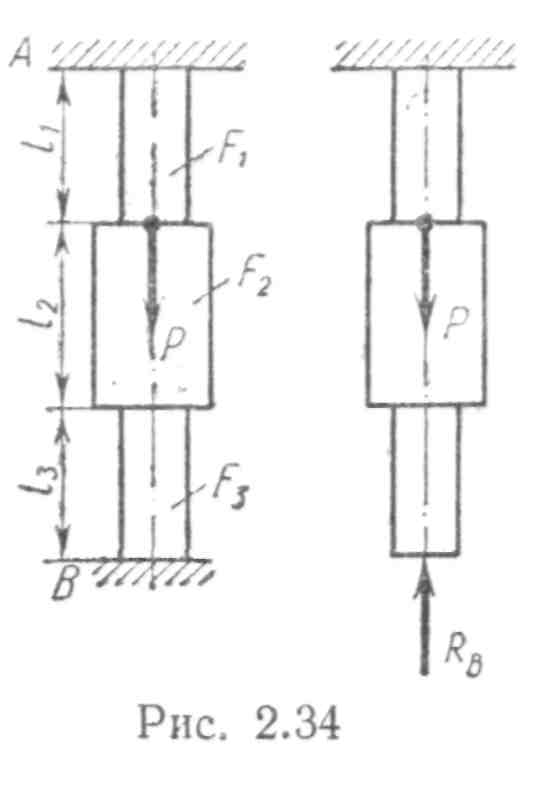
Рассмотрим, например, стержень, изображенный на рис. 4. Нагрузка Р воспринимается частично верхней заделкой и частично нижней. Для определения двух реакций, возникающих в заделках, можно использовать только одно уравнение равновесия: равенство нулю суммы проекций всех сил на вертикальную ось. Остальные два уравнения равновесия обращаются в тождества.
Поскольку неизвестных — два, а уравнение равновесия — одно, то потребуется составить одно рис 4 дополнительное уравнение, рассматривая деформации стержня или перемещения его сечений. Такие системы называются системами один раз (однажды) статически неопределимыми.
Системы, требующие составления двух уравнений перемещений, называются дважды статически неопределимыми и т. д.
Для решения рассматриваемой задачи поступим следующим образом.
Отбросим одну заделку, например нижнюю, заменив ее действие на стержень неизвестной реакцией.
В полученной таким образом системе (обычно ее называют основной системой) приравняем нулю перемещение нижнего сечения, так как в заданной системе это сечение заделано и перемещаться не может.
От действия силы Rb сечение В будет перемещаться вверх в результате укорочения всего стержня, а от действия силы Р — вниз в результате удлинения верхней части стержня длиной 1>Ъ> так как сила Р при отброшенной нижней заделке передается на верхнюю заделку только через эту часть стержня.
Для определения деформаций используем закон Гука. Так как площадь сечения стержня разная на различных участках, то деформацию определяем по частям.
Уравнение перемещений имеет вид

Первые три члена представляют собой перемещение вверх сечения В под действием силы R>B>, четвертый член — перемещение вниз сечения В от действия силы Р. Из этого уравнения находим R>B>, после чего определение продольных сил в сечениях производится без затруднений по методу сечений, как показано в предыдущих параграфах.
Литература
1 Феодосьев В.И. Сопротивление материалов. 2002
2 Беляев Н.М. Сопротивление материалов. 1999
3 Красковский Е.Я., Дружинин Ю.А., Филатова Е.М. Расчет и конструирование механизмов приборов и вычислительных систем. 1991
4 Работнов Ю.Н. Механика деформируемого твердого тела. 2004
5 Степин П.А. Сопротивление материалов. 1990