Анализ качества работы системы автоматического регулирования в переходном и установившемся режимах
Министерство образования и науки Украины
Донбасский Государственный Технический Университет
Кафедра автоматизированных электромеханических систем и электропривода
Анализ качества работы системы автоматического регулирования в переходном и установившемся режимах
Алчевск, 2007
Программа работы
1) Построить логарифмические амплитудно и фазо-частотные характеристики разомкнутой системы по передаточным функциям и их параметрам, взятым из таблицы 1.4 и 1.5
2) Определить запасы устойчивости.
3) Построить вещественную частотную характеристику замкнутой системы по логарифмическим амплитудно и фазо-частотным характеристикам разомкнутой системы.
4) Построить переходную характеристику системы по вещественной частотной характеристике замкнутой системы.
5) Определить показатели качества работы системы в переходном и установившемся режимах.
6) Проанализировать результаты расчетов.
Из таблиц 1.4 и 1.5 выбираем согласно своему варианту следующие данные
 ,
,
где Т1=0.8, Т2=0.08, К=2,5
1) Построим ЛАЧХ и ЛФЧХ разомкнутой системы по передаточной функции и их параметрам.
Для данной передаточной функции выполним замену р на j



Вычислим логарифмические амплитудно-частотную и фазо-частотную характеристики:



ЛАЧХ и ЛФЧХ изображены на рисунке 1.
Определим частоты сопряжения:
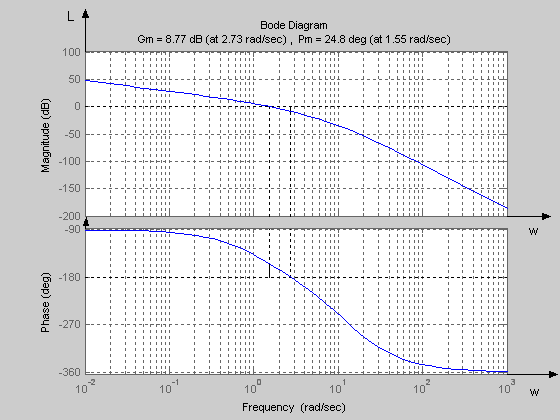
Рисунок 1 - ЛАЧХ и ЛФЧХ разомкнутой системы
2) Определим запасы устойчивости по рисунку 1
 8.77 дБ - запас устойчивости по амплитуде;
8.77 дБ - запас устойчивости по амплитуде;
 24.8° - запас устойчивости по фазе;
24.8° - запас устойчивости по фазе;
3) Построить вещественную частотную характеристику замкнутой системы по логарифмическим амплитудно и фазо-частотным характеристикам разомкнутой системы.
ВЧХ замкнутой системы по ЛЧХ разомкнутой системы строиться с помощью специальной номограммы (рисунок 2). Исходными при построении номограммы является выражение
 ,
,
Подставляя в это выражение
 и
и
 ,
,
Получаем
 ,
,
откуда видно,
что ординаты
 ВЧХ
замкнутой системы связаны с координатами
ВЧХ
замкнутой системы связаны с координатами
 и
и
 частотной характеристики разомкнутой
системы. Одному и тому же значению
частотной характеристики разомкнутой
системы. Одному и тому же значению
 соответствуют различные координаты
и
.
Геометрическое место точек на плоскости,
где по оси ординат откладываются значения
соответствуют различные координаты
и
.
Геометрическое место точек на плоскости,
где по оси ординат откладываются значения
 ,
а по оси абсцисс - значение
,
соответствующее постоянному значению
ординаты ВЧХ
,
представляет собой определенную кривую.
Семейство таких кривых, соответствующих
различным значениям
,
образуют номограмму (рисунок 2), с помощью
которой можно определить ВЧХ замкнутой
системы по ее ЛЧХ в разомкнутом состоянии.
,
а по оси абсцисс - значение
,
соответствующее постоянному значению
ординаты ВЧХ
,
представляет собой определенную кривую.
Семейство таких кривых, соответствующих
различным значениям
,
образуют номограмму (рисунок 2), с помощью
которой можно определить ВЧХ замкнутой
системы по ее ЛЧХ в разомкнутом состоянии.
Для определения ВЧХ замкнутой системы предварительно на номограмме строят ЛАФЧХ разомкнутой системы.
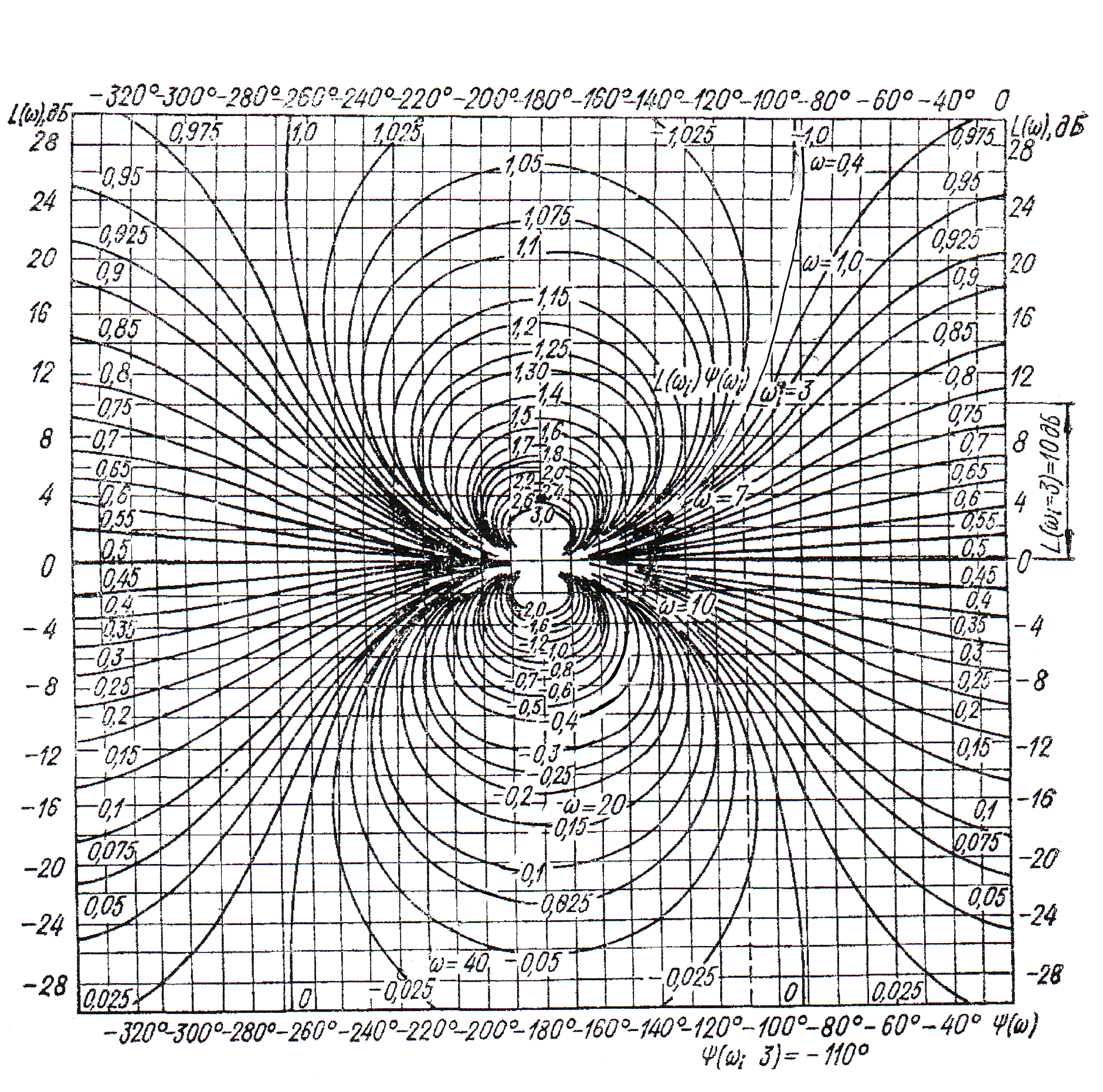
Рисунок 2 - Номограммы с нанесенной ЛАФЧХ разомкнутой системы
Рисунок 3 - ВЧХ замкнутой системы
Рисунок 4 - Разложение ВЧХ на прямоугольные трапецеидальные характеристики
4) Построим переходную характеристику системы по вещественной частотной характеристике замкнутой системы.
Заменяем кривую ВЧХ ломаной абвгде (рисунок 3) и в соответствии с последней разбиваем ВЧХ на три прямоугольные трапеции (рисунок 4).
Для оценки качества САУ прибегают к построению кривой переходного процесса системы h (t) [x (t)].
Определим для каждой трапеции:
начальную ординату трапеции Р (0);
частоту положительности ω>п>>i>;
частоту, определяющую длину горизонтального участка ω>а>>i>;
коэффициент наклона χ>i>= ω>а>>i>/ω>п>>i>
Снятые данные с трапеций (рисунок 4):
Р>I> (0) =2.64 ω>а>>I>=1.41 с-1 ω>п>>I>= 1.83с-1 χ>I>=0.77
Р>II> (0) =-1.32 ω>а2>=2.04с-1 ω>п2>=3.08с-1 χ>2>=0.66
Р>III> (0) =-0.12 ω>а3>=4.4 с-1 ω>п3>=6.75с-1 χ>3>=0.65
Из таблицы А7 (Л4) выбираем h - функции с коэффициентом наклона χ, ближайшим к расчётным значениям.
Переходные функции h>i> (t) для реальных трапеций находим умножением нормированных ординат h>i> на высоту трапеции:
h>i>=
Р>i> (0)

и делением
безразмерного времени
 на
частоту w>0>:
на
частоту w>0>:

В соответствии с расчетами, приведенными в таблице 1, выполняем построение графиков переходных процессов h>1> (t), h>2> (t), h>3> (t). Графики переходных процессов h>1> (t), h>2> (t), h>3> (t) и h (t) приведены на рисунке 5.
Таблица 1 - Сводная таблица данных для построения переходных функций, соответствующих прямоугольным трапециям.
|
Трапеция 1 |
Р>I> (0) =2.64 ω>а>>I>=1.41 с-1 ω>п>>I>= 1.83с-1 χ>I>=0.77 |
|||||||||
|
|
0.5 |
1 |
2 |
3.5 |
6 |
8 |
10.5 |
15.5 |
20 |
25 |
|
h |
0.267 |
0.519 |
0.919 |
1.161 |
0.984 |
0.932 |
1.033 |
0,983 |
1,003 |
1,001 |
|
|
0.273 |
0.546 |
1.093 |
1.912 |
3.278 |
4.372 |
5.737 |
8.469 |
10.928 |
13.662 |
|
|
0.705 |
1.371 |
2.426 |
3.065 |
2.597 |
2.461 |
2.727 |
2.595 |
2.648 |
2.643 |
|
Трапеция 2 |
Р>II> (0) =-1.32 ω>а2>=2.04с-1 ω>п2>=3.08с-1 χ>2>=0.66 |
|||||||||
|
|
0.5 |
1 |
2 |
3.5 |
6 |
8 |
10.5 |
15.5 |
20 |
25 |
|
h |
0.259 |
0.505 |
0.899 |
1.158 |
1.003 |
0.935 |
1.017 |
0.993 |
0.995 |
1.003 |
|
|
0.163 |
0.325 |
0.649 |
1.136 |
1.948 |
2.597 |
3.409 |
5.033 |
6.494 |
8.117 |
|
|
-0.342 |
-0.666 |
-1.186 |
-1.528 |
-1.324 |
-1.234 |
-1.342 |
-1.311 |
-1.314 |
-1.324 |
|
Трапеция 3 |
Р>III> (0) =-0.12 ω>а3>=4.4 с-1 ω>п3>=6.75с-1 χ>3>=0.65 |
|||||||||
|
|
0.5 |
1 |
2 |
3.5 |
6 |
8 |
10.5 |
15.5 |
20 |
25 |
|
h |
0.259 |
0.505 |
0.899 |
1.158 |
1.003 |
0.935 |
1.017 |
0.993 |
0.995 |
1.003 |
|
|
0.074 |
0.148 |
0.296 |
0.518 |
0.888 |
1.185 |
1.555 |
2.296 |
2.963 |
3.703 |
|
|
-0.032 |
-0.061 |
-0.108 |
-0.121 |
-0.121 |
-0.112 |
-0.123 |
-0.119 |
-0.119 |
-0.121 |




Рисунок 5 - Переходная функция следящей системы и ее составляющей
5) Определить показатели качества работы системы в переходном и установившемся режимах.
Показатели качества работы системы, оценивают по ее переходной функции (рисунок 5). Основными показателями качества являются:
1) максимальное перерегулирование
 ;
;
2) длительность
переходного процесса
 (время регулирования)
(время регулирования)

3) время установления

4) число колебаний N - число колебаний регулируемой величины за время переходного регулирования;
N=1
5) собственная частота колебаний системы

6) степень демпфирования
 ;
;
Анализ результатов расчёта
В ходе выполнения данного домашнего задания выяснилось, что система является устойчивой. Определили запасы устойчивости системы по амплитуде ΔL=8,77 дБ и по фазе γ=24,8°. Полученные значения являются приемлемыми.
В результате исследования системы были получены значения основных параметров качества переходного процесса, которые лежат в обще допустимых пределах.
Для улучшения динамических свойств данной САУ следует провести её стабилизацию и коррекцию, с помощью дополнительных конструктивных элементов. Однако синтез КУ - это задача и цель домашнего задания №4.
Литература
Теория автоматического управления. / Под ред. А.В. Нетушила. - М.: ВШ., 1976, - 400с
Зайцев Г.Ф. Теория автоматического управления и регулирования. - К.: ВШ., 1988, - 430с.
Лукас В.А. Теория автоматического управления. Учебн. для вузов, - М.: Надра, 1990. - 416с
Методические указания к домашним заданиям по курсу "ТАУ"/ Сост.: Сергиенко Н.Н. - Алчевск: ДГМИ, 2003. - 54с.
Расчёт автоматических систем. Под ред. А.В. Фатеева. Учебн. пособие для вузов. М., "ВШ", 1973. - 336с.