Численные методы решения типовых математических задач
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
Тульский государственный университет
Кафедра автоматики и телемеханики
Численные методы решения типовых математических задач
Курсовая работа
по дисциплине «Вычислительная математика»
Выполнил студент группы _____________
(подпись)
Проверил _____________
(подпись)
Тула 2008г.
Содержание
Введение
1. Решение систем линейных алгебраических уравнений методом простой итерации
1.1 Постановка задачи
1.2 Математическая формулировка задачи
1.3 Обзор существующих численных методов решения задачи
1.4 Численный метод решения задачи
1.5 Схема алгоритма
1.6 Текст программы
1.7 Тестовый пример
2. Полиномиальная интерполяция функции методом Ньютона с разделенными разностями
2.1 Постановка задачи
2.2 Математическая формулировка задачи
2.3 Обзор существующих численных методов решения задачи
2.4 Численный метод решения задачи
2.5 Схема алгоритма
2.6 Текст программы
2.7 Тестовый пример
3. Среднеквадратическое приближение функции
3.1 Постановка задачи
3.2 Математическая формулировка задачи
3.3 Обзор существующих численных методов решения задачи
3.4 Численный метод решения задачи
3.5 Схема алгоритма
3.6 Текст программы
3.7 Тестовый пример
4. Численное интегрирование функций методом Гаусса
4.1 Постановка задачи
4.2 Математическая формулировка задачи
4.3 Обзор существующих численных методов решения задачи
4.4 Численный метод решения задачи
4.5 Схема алгоритма
4.6 Текст программы
4.7 Тестовый пример
Заключение
Список использованных источников
Введение
Появление и непрерывное совершенствование быстродействующих электронных вычислительных машин (ЭВМ) привело к подлинно революционному преобразованию пауки вообще и математики в особенности. Изменилась технология научных исследований, колоссально увеличились возможности теоретического изучения, прогноза сложных процессов, проектирования инженерных конструкций. Решение крупных научно-технических проблем, примерами которых могут служить проблемы овладения ядерной энергией и освоения космоса, стало возможным лишь благодаря применению математического моделирования и новых численных методов, предназначенных для ЭВМ.
В настоящее время можно говорить, что появился новый способ теоретического исследования сложных процессов, допускающих математическое описание,— вычислительный эксперимент, т.е. исследование естественнонаучных проблем средствами вычислительной математики. Поясним существо этого способа исследования на примере решения какой-либо физической проблемы. Пусть требуется изучить некоторый физический процесс. Математическому исследованию предшествует выбор физического приближения, т. е. решение вопроса о том, какие факторы надо учесть, а какими можно пренебречь. После этого проводится исследование проблемы методом вычислительного эксперимента.
Разработка и исследование вычислительных алгоритмов и их применение к решению конкретных задач составляет содержание огромного раздела современной математики — вычислительной математики.
Вычислительную математику определяют в широком смысле этого термина как раздел математики, включающий круг вопросов, связанных с использованием ЭВМ, и в узком смысле — как теорию численных методов и алгоритмов решения поставленных математических задач.
Общим для всех численных методов является сведение математической задачи к конечномерной. Это чаще всего достигается дискретизацией исходной задачи, т. е. переходом от функций непрерывного аргумента к функциям дискретного аргумента. После дискретизации исходной задачи надо построить вычислительный алгоритм, т. е. указать последовательность арифметических и логических действий, выполняемых па ЭВМ и дающих за конечное число действий решение дискретной задачи. Полученное решение дискретной задачи принимается за приближенное решение исходной математической задачи.
При решении задачи па ЭВМ мы всегда получаем не точное решение исходной задачи, а некоторое приближенное решение. Чем же обусловлена возникающая погрешность? Можно выделить три основные причины возникновения погрешности при численном решении исходной математической задачи. Прежде всего, входные данные исходной задачи (начальные и граничные условия, коэффициенты и правые части уравнений) всегда задаются с некоторой погрешностью. Погрешность численного метода, обусловленную неточным заданием входных данных, принято называть неустранимой погрешностью. Далее, при замене исходной задачи дискретной задачей возникает погрешность, называемая погрешностью дискретизации или, иначе, погрешностью метода. Наконец, конечная разрядность чисел, представляемых в ЭВМ, приводит к ошибкам округления, которые могут нарастать в процессе вычислений
Численные методы дают приближенное решение задачи. Это значит, что вместо точного решения и (функции или функционала) некоторой задачи мы находим решение у другой задачи, близкое в некотором смысле (например, по норме) к искомому. Основная идея всех методов — дискретизация или аппроксимация (замена, приближение) исходной задачи другой задачей, более удобной для решения на ЭВМ, причем решение аппроксимирующей задачи зависит от некоторых параметров, управляя которыми, можно определить решение с требуемой точностью. Например, в задаче численного интегрирования такими параметрами являются узлы и веса квадратурной формулы. Далее, решение дискретной задачи является элементом конечномерного пространства.
1. Решение систем линейных алгебраических уравнений методом простой итерации
1.1 Постановка задачи
Разработать схему алгоритма и написать программу на языке Turbo Pascal 7.0 для решении систем линейных алгебраических уравнений, используя метод простой итерации.
1.2 Математическая формулировка задачи
Пусть А – невырожденная
матрица
 и
нужно решить систему
и
нужно решить систему
где диагональные элементы матрицы А ненулевые.
1.3 Обзор существующих численных методов решения задачи
Метод Гаусса
В методе Гаусса матрица СЛАУ с помощью равносильных преобразований преобразуется в верхнюю треугольную матрицу, получающуюся в результате прямого хода. В обратном ходе определяются неизвестные.
Пусть дана СЛАУ
Запишем расширенную матрицу системы:
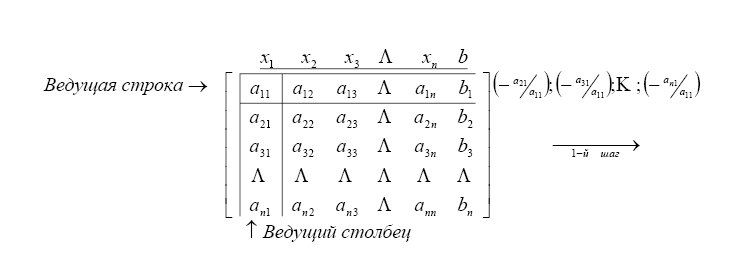
На первом шаге алгоритма Гаусса выберем диагональный элемент (если он равен 0, то первую строку переставляем с какой-либо нижележащей строкой) и объявляем его a>11>≠0 ведущим, а соответствующую строку и столбец, на пересечении которых он стоит - ведущими. Обнулим элементы ведущего столбца. Для этого сформируем числа (-a>22>/a>11>), (-a>31>/a>11>), .. , (a>n1>/a>11>).
LU-разложения матриц
Компьютерная реализация метода Гаусса часто осуществляется с использованием LU-разложения матриц.
LU – разложение матрицы A представляет собой разложение матрицы A в произведение нижней и верхней треугольных матриц, т.е.
A=LU
где L - нижняя треугольная матрица (матрица, у которой все элементы, находящиеся выше главной диагонали равны нулю, lij=0 при i>j), U- верхняя треугольная матрица (матрица, у которой все элементы, находящиеся ниже главной диагонали равны нулю, uij=0 при i>j).
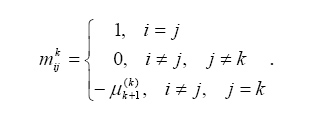
LU – разложение может быть построено с использованием описанного выше метода Гаусса. Рассмотрим k - ый шаг метода Гаусса, на котором осуществляется обнуление поддиагональных элементов k - го столбца матрицы. Как было описано выше, с этой целью используется следующая операция

В терминах матричных операций такая операция эквивалентна умножению A(k)=MkA(k-1), где элементы матрицы определяются следующим образом
В терминах матричных операций такая операция эквивалентна умножению A(k)=MkA(k-1), где элементы матрицы определяются следующим образом
В результате прямого хода метода Гаусса получим , A(n-1)=U

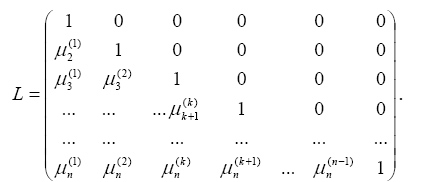
где A(n-1)=U - верхняя треугольная матрица, а - нижняя треугольная матрица, имеющая вид .
Таким образом, искомое разложение A=LU получено.
Метод прогонки
Метод прогонки является одним из эффективных методов решения СЛАУ с трех - диагональными матрицами, возникающих при конечно-разностной аппроксимации задач для обыкновенных дифференциальных уравнений (ОДУ) и уравнений в частных производных второго порядка и является частным случаем метода Гаусса. Рассмотрим следующую СЛАУ:
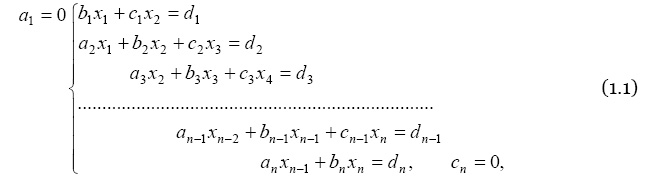
решение которой будем искать в виде

где Qi,Pi,i=1,n - прогоночные коэффициенты, подлежащие определению. Для их определения выразим из первого уравнения СЛАУ (1.1) x1 через x2, получим:

откуда
Из второго уравнения СЛАУ (1.1) с помощью (1.3) выразим x2 через x3, получим:

откуда
Продолжая этот процесс, получим из i-го уравнения СЛАУ (1.1):

следовательно
Из последнего уравнения СЛАУ имеем

то есть
Метод простых итераций
При большом числе уравнений прямые методы решения СЛАУ (за исключением метода прогонки) становятся труднореализуемыми на ЭВМ прежде всего из-за сложности хранения и обработки матриц большой размерности. В то же время характерной особенностью ряда часто встречающихся в прикладных задачах СЛАУ является разреженность матриц. Число ненулевых элементов таких матриц мало по сравнению с их размерностью. Для решения СЛАУ с разреженными матрицами предпочтительнее использовать итерационные методы.
Методы последовательных приближений, в которых при вычислении последующего приближения решения используются предыдущие, уже известные приближенные решения, называются итерационными.
Метод Зейделя решения СЛАУ
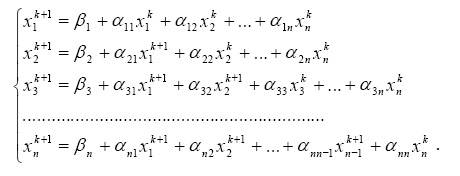
Метод простых итераций довольно медленно сходится. Для его ускорения существует метод Зейделя, заключающийся в том, что при вычислении компонента xik+1 вектора неизвестных на (k+1)-й итерации используются x1k+1, x2k+1, .., xik+1 уже вычисленные на (k+1)-й итерации. Значения остальных компонент берутся из предыдущей итерации. Так же как и в методе простых итераций строится эквивалентная СЛАУ и за начальное приближение принимается вектор правых частей . Тогда метод Зейделя для известного вектора на k-ой итерации имеет вид:
предыдущей итерации. Так же как и в методе простых итераций строится эквивалентная СЛАУ и за начальное приближение принимается вектор правых частей . Тогда метод Зейделя для известного вектора на k-ой итерации имеет вид:
Из
этой системы видно, что
 ,
где В - нижняя треугольная матрица с
диагональными элементами , равными
нулю, а С - верхняя треугольная матрица
с диагональными элементами, отличными
от нуля, α=B+C. Следовательно
,
где В - нижняя треугольная матрица с
диагональными элементами , равными
нулю, а С - верхняя треугольная матрица
с диагональными элементами, отличными
от нуля, α=B+C. Следовательно
При таком способе приведения исходной СЛАУ к эквивалентному виду метод простых итераций носит название метода Якоби.

откуда

Таким образом, метод Зейделя является методом простых итераций с матрицей правых частей α=(E-B)-1C и вектором правых частей (E-B)-1β.
Разрешим систему относительно неизвестных при ненулевых диагональных элементах , aii≠0, i= 1,n (если какой-либо коэффициент на главной диагонали равен нулю, достаточно соответствующее уравнение поменять местами с любым другим уравнением). Получим следующие выражения для компонентов вектора β и матрицы α эквивалентной системы

В качестве нулевого приближения x(0) вектора неизвестных примем вектор правых частей x(0)=β. Тогда метод простых итераций примет вид:
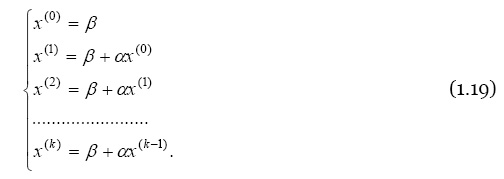
Из (1.19) видно преимущество итерационных методов по сравнению, например, с рассмотренным выше методом Гаусса. В вычислительном процессе участвуют только произведения матрицы на вектор, что позволяет работать только с ненулевыми элементами матрицы, значительно упрощая процесс хранения и обработки матриц.
Имеет место следующее достаточное условие сходимости метода простых итераций.
Метод
простых итераций (1.19) сходится к
единственному решению СЛАУ при любом
начальном приближении x(0),
если какая-либо норма матрицы α
эквивалентной системы меньше единицы

Если используется метод Якоби (выражения (1.18) для эквивалентной СЛАУ), то
достаточным условием сходимости является диагональное преобладание матрицы A, т.е.
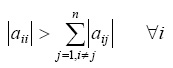 (для
каждой строки матрицы A модули элементов,
стоящих на главной диагонали, больше
суммы модулей недиагональных элементов).
Очевидно, что в этом случае ||α||>c>
меньше единицы и, следовательно,
итерационный процесс (1.19) сходится.
(для
каждой строки матрицы A модули элементов,
стоящих на главной диагонали, больше
суммы модулей недиагональных элементов).
Очевидно, что в этом случае ||α||>c>
меньше единицы и, следовательно,
итерационный процесс (1.19) сходится.
Приведем также необходимое и достаточное условие сходимости метода простых итераций. Для сходимости итерационного процесса (1.19) необходимо и достаточно, чтобы спектр матрицы α эквивалентной системы лежал внутри круга с радиусом, равным единице.
При выполнении достаточного условия сходимости оценка погрешности решения на k- ой итерации дается выражением:

Следует подчеркнуть, что это неравенство дает завышенное число итераций k, поэтому редко используется на практике
1.4 Численный метод решения задачи
Разрешим систему относительно неизвестных при ненулевых диагональных элементах , aii≠0, i= 1,n (если какой-либо коэффициент на главной диагонали равен нулю, достаточно соответствующее уравнение поменять местами с любым другим уравнением). Получим следующие выражения для компонентов вектора β и матрицы α эквивалентной системы:
При таком способе приведения исходной СЛАУ к эквивалентному виду метод простых итераций носит название метода Якоби.
В качестве нулевого приближения x(0) вектора неизвестных примем вектор правых частей x(0)=β. Тогда метод простых итераций примет вид:
Из (1.19) видно преимущество итерационных методов по сравнению, например, с рассмотренным выше методом Гаусса. В вычислительном процессе участвуют только произведения матрицы на вектор, что позволяет работать только с ненулевыми элементами матрицы, значительно упрощая процесс хранения и обработки матриц.
Имеет место следующее достаточное условие сходимости метода простых итераций.
Метод
простых итераций (1.19) сходится к
единственному решению СЛАУ при любом
начальном приближении x(0),
если какая-либо норма матрицы α
эквивалентной системы меньше единицы
Если используется метод Якоби (выражения (1.18) для эквивалентной СЛАУ), то
достаточным условием сходимости является диагональное преобладание матрицы A, т.е.
(для
каждой строки матрицы A модули элементов,
стоящих на главной диагонали, больше
суммы модулей недиагональных элементов).
Очевидно, что в этом случае ||α||>c>
меньше единицы и, следовательно,
итерационный процесс (1.19) сходится.
Приведем также необходимое и достаточное условие сходимости метода простых итераций. Для сходимости итерационного процесса (1.19) необходимо и достаточно, чтобы спектр матрицы α эквивалентной системы лежал внутри круга с радиусом, равным единице.
При выполнении достаточного условия сходимости оценка погрешности решения на k- ой итерации дается выражением:
где x·- точное решение СЛАУ.
Процесс итераций останавливается при выполнении условия , где εε≤)(kε - задаваемая вычислителем точность.
Принимая
во внимание, что из (1.20) следует неравенство
 ,
можно получить априорную оценку
необходимого для достижения заданной
точности числа итераций. При использовании
в качестве начального приближения
вектора β такая оценка определится
неравенством:
,
можно получить априорную оценку
необходимого для достижения заданной
точности числа итераций. При использовании
в качестве начального приближения
вектора β такая оценка определится
неравенством:
откуда получаем априорную оценку числа итераций k при ||α||<1
Следует подчеркнуть, что это неравенство дает завышенное число итераций k, поэтому редко используется на практике.
1.6 Текст программы
program Yakobi;
uses crt;
const
maxn=100;
type
matrix=array[1..maxn,1..maxn] of real;
vector=array[1..maxn] of real;
vector1=array[1..maxn] of real;
var
i,j,n,k1: integer;
e,norma:real;
a: matrix;
b: vector;
x2,x3: vector1;
imya,dannble_i_rezultat,ekran:string;
procedure input(var kolvo:integer; var pogreshnostb:real; var matr1:matrix; var matr2:vector);
{Ввод исходных данных}
var i,j,code:integer;
a_s: string;
b_s: string;
begin
writeln('введите количество уравнений');
readln(kolvo);
writeln('введите погрешность вычисления');
readln(pogreshnostb);
writeln('введите матрицу коэффициентов при неизвестных');
for i:=1 to kolvo do
for j:=1 to kolvo do
begin
repeat
begin
writeln('введите элемент [',i,',',j,'] и нажмите Enter');
readln(a_s);
if (i=j) and (a_s='0') then
repeat
begin
writeln('Элементы на главной диагонали должны быть отличны от нуля. Повторите ввод');
readln(a_s);
end;
until a_s<>'0';
val(a_s,matr1[i,j],code);
end;
until code=0;
end;
writeln('введите вектор свободных коэффициентов');
for j:=1 to kolvo do
begin
repeat
writeln('введите элемент ',j,' и нажмите Enter');
readln(b_s);
val(b_s,matr2[j],code);
until code=0;
end;
end;
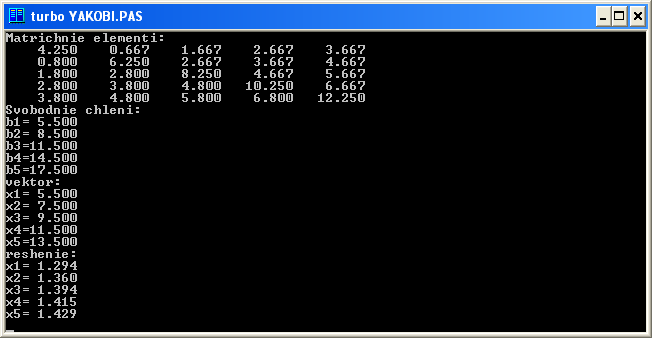
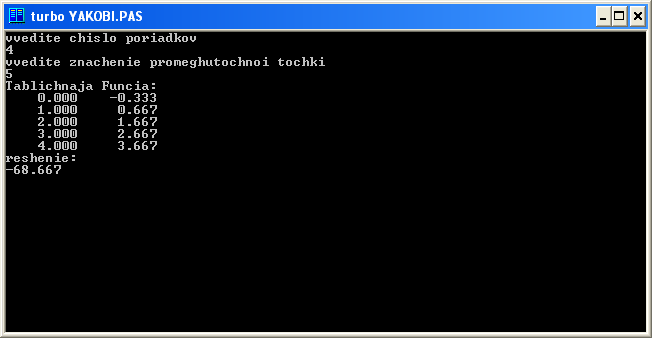
1.7 Тестовый пример
2. Полиномиальная интерполяция функции методом Ньютона с разделенными разностями
2.1 Постановка задачи
Разработать схему алгоритма и написать программу на языке Turbo Pascal 7.0 для интерполирования функции, заданной в узлах, используя метод Ньютона с разделенными разностями.
2.2 Математическая формулировка задачи
Дана табличная функция:
|
i |
x>i> |
y>i> |
|
0 |
x>0> |
y |
|
1 |
x>1> |
0 |
|
2 |
x>2> |
y |
|
... |
... |
1 |
|
n |
x>n> |
y |
|
|
|
2 |
|
|
|
... |
|
|
|
y |
|
|
|
n |
или
 Точки
с координатами (x>i>,
y>i>) называются
узловыми точками или узлами.
Точки
с координатами (x>i>,
y>i>) называются
узловыми точками или узлами.
Количество узлов в табличной функции равно N=n+1.
Необходимо найти значение
этой функции в промежуточной точке,
например, x=D, причем
 .
.
Для решения задачи строим интерполяционный многочлен.
2.3 Обзор существующих численных методов решения задачи
Интерполяция по Лагранжу
Интерполяционный многочлен может быть построен при помощи специальных интерполяционных формул Лагранжа, Ньютона, Стерлинга, Бесселя и др.
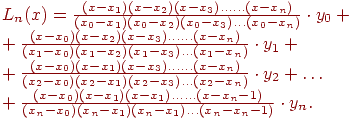
Интерполяционный многочлен по формуле Лагранжа имеет вид:
Докажем, что многочлен Лагранжа является интерполяционным многочленом, проходящим через все узловые точки, т.е. в узлах интерполирования x>i> выполняется условие L>n>(x>i>) = y>i>. Для этого будем последовательно подставлять значения координат узловых точек таблицы в многочлен (2.1). В результате получим:
если x=x>0>, то L>n>(x>0>) = y>0>,
если x=x>1>, то L>n>(x>1>) = y>1>,
……………
если x=x>n>, то L>n>(x>n>) = y>n>.
Это достигнуто за счет того, что в числителе каждой дроби при соответствующем значении у>j>, j=0,1,2,…,n отсутствует сомножитель (x-x>i>), в котором i=j, а знаменатель каждой дроби получен заменой переменной х на соответствующее значение х>j>.
Таким образом, интерполяционный
многочлен Лагранжа приближает заданную
табличную функцию, т.е. L>n>(x>i>)
= y>i> и мы можем
использовать его в качестве вспомогательной
функции для решения задач интерполирования,
т.е.
 .
.
Чем больше узлов интерполирования на отрезке [x>0>,x>n>] , тем точнее интерполяционный многочлен приближает заданную табличную функцию, т.е. тем точнее равенство:

Однако с увеличением числа узлов интерполирования возрастает степень интерполяционного многочлена n и в результате значительно возрастает объем вычислительной работы. Поэтому при большом числе узлов необходимо применять ЭВМ. В этом случае удобно находить значения функции в промежуточных точках, не получая многочлен в явном виде.
При решении задачи экстраполирования функции с помощью интерполяционного многочлена вычисление значения функции за пределами отрезка [x>0>,x>n>] обычно производят не далее, чем на один шаг h, равный наименьшей величине

так как за пределами отрезка [x>0>,x>n>] погрешности, как правило, увеличиваются.
Интерполяция по Ньютону
Интерполяционный многочлен по формуле Ньютона имеет вид:
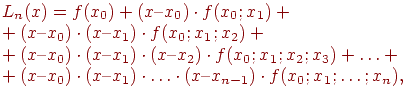 (2.2)
(2.2)
где n – степень многочлена,
 -
разделенные разности
0-го, 1-го, 2-го,…., n-го порядка, соответственно.
-
разделенные разности
0-го, 1-го, 2-го,…., n-го порядка, соответственно.
Сплайн-интерполяция
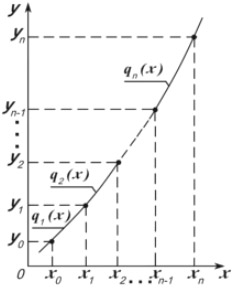
Сплайны стали широко использоваться в вычислительной математике сравнительно недавно. В машиностроительном черчении они применяются уже давно, так как сплайны – это лекала или гибкие линейки, деформация которых позволяет провести кривую через заданные точки (x>i>, у>i>).
Используя теорию изгиба бруса при малых деформациях, можно показать, что сплайн – это группа кубических многочленов, в местах сопряжения которых первая и вторая производные непрерывны. Такие функции называются кубическими сплайнами. Для их построения необходимо задать коэффициенты, которые единственным образом определяют многочлен в промежутке между данными точками.
Например, для некоторых функций (рис.) необходимо задать все кубические функции q>1>(x), q>2>(x), …q>n>(x).
В наиболее общем случае эти многочлены имеют вид:

где k>ij> - коэффициенты, определяемые описанными ранее условиями, количество которых равно 4n. Для определения коэффициентов kij необходимо построить и решить систему порядка 4n.
Первые 2n условий требуют, чтобы сплайны соприкасались в заданных точках:
Следующие (2n-2) условий требуют, чтобы в местах соприкосновения сплайнов были равны первые и вторые производные:

Система алгебраических уравнений имеет решение, если число уравнений соответствует числу неизвестных. Для этого необходимо ввести еще два уравнения. Обычно используются следующие условия:
При построении алгоритма метода первые и вторые производные удобно аппроксимировать разделенными разностями соответствующих порядков.
Полученный таким образом сплайн называется естественным кубическим сплайном. Найдя коэффициенты сплайна, используют эту кусочно-гладкую полиноминальную функцию для представления данных при интерполяции.
2.4 Численный метод решения задачи
Значения f(x>0>), f(x>1>), … , f(x>n>) , т.е. значения табличной функции в узлах, называются разделенными разностями нулевого порядка (k=0).
Отношение
 называется
разделенной разностью первого порядка
(k=1) на участке [x>0>,
x>1>] и равно
разности разделенных разностей нулевого
порядка на концах участка [x>0>,
x>1>], разделенной
на длину этого участка.
называется
разделенной разностью первого порядка
(k=1) на участке [x>0>,
x>1>] и равно
разности разделенных разностей нулевого
порядка на концах участка [x>0>,
x>1>], разделенной
на длину этого участка.
Для произвольного участка [x>i>, x>i+1>] разделенная разность первого порядка (k=1) равна

Отношение
 называется
разделенной разностью второго порядка
(k=2) на участке
[x>0>,
x>2>]
и равно разности разделенных разностей
первого порядка, разделенной на длину
участка [x>0>,
x>2>].
называется
разделенной разностью второго порядка
(k=2) на участке
[x>0>,
x>2>]
и равно разности разделенных разностей
первого порядка, разделенной на длину
участка [x>0>,
x>2>].
Для произвольного участка [x>i>, x>i+2>] разделенная разность второго порядка (k=2) равна

Таким образом, разделенная разность k-го порядка на участке [x>i>, x>i+k>] может быть определена через разделенные разности (k-1)-го порядка по рекуррентной формуле:
 (2.3)
(2.3)
Где

 n – степень
многочлена.
n – степень
многочлена.
Максимальное значение k равно n. Тогда i =0 и разделенная разность n-го порядка на участке [x>0>,x>n>] равна
 ,
,
т.е. равна разности разделенных разностей (n-1)-го порядка, разделенной на длину участка [x>0>,x>n>].
Разделенные разности

являются
вполне определенными числами, поэтому
выражение (2.2) действительно является
алгебраическим многочленом
n-й степени. При этом в многочлене (2.2)
все разделенные алгебраическим
многочленом n-й степени. При этом в
многочлене (2.2) все разделенные разности
определены для участков [x>0>,
x>0+k>],
 .
.
Лемма: алгебраический многочлен (2.2), построенный по формулам Ньютона, действительно является интерполяционным многочленом, т.е. значение многочлена в узловых точках равно значению табличной функции

Докажем это. Пусть х=х>0 >, тогда многочлен (2.2) равен

Пусть х=х>1>, тогда многочлен (2.2) равен

Пусть х=х>2>, тогда многочлен (2.2) равен

Заметим, что решение задачи интерполяции по Ньютону имеет некоторые преимущества по сравнению с решением задачи интерполяции по Лагранжу. Каждое слагаемое интерполяционного многочлена Лагранжа зависит от всех значений табличной функции y>i>, i=0,1,…n. Поэтому при изменении количества узловых точек N и степени многочлена n (n=N-1) интерполяционный многочлен Лагранжа требуется строить заново. В многочлене Ньютона при изменении количества узловых точек N и степени многочлена n требуется только добавить или отбросить соответствующее число стандартных слагаемых в формуле Ньютона (2.2). Это удобно на практике и ускоряет процесс вычислений.
2.5 Схема алгоритма
На рисунке 2.1 представлена схема алгоритма решения задачи №2.
На рисунке 2.2 представлена схема алгоритма ввода исходных данных (подпрограмма-процедура Vvod).
На рисунке 2.3 представлена схема алгоритма интерполяции функции по методу Ньютона с разделенными разностями (newt)
На рисунке 2.4 представлена схема алгоритма записи данных и результата в файл (подпрограмма-процедура zapisb_v_fail).
На рисунке 2.5 представлена схема алгоритма вывода содержимого записанного файла на экран (подпрограмма-процедура outputtoscreen).
2.6 Текст программы
program newton;
uses crt,graph;
const c=10;
type matr=array[0..c,0..c] of real;
mas=array[0..c] of real;
var x,y,koef_polinoma:mas;
a:matr;
b:mas;
d1:real;
n:integer;
fail,fail1,ekran:text;
procedure Vvod(var kolvo:integer; var uzel,fun:mas);
{Процедура осуществляет ввод данных:пользователь вводит с клавиатуры
узлы интерполяции и значения функции в них. Также определяется количество узлов.}
var code,i:integer; s:string;
begin
writeln('введите количество узлов');
readln(kolvo);
kolvo:=kolvo-1;
for i:=0 to kolvo do
begin
repeat
writeln('введите ',i,'-й узел интерполирования');
readln(s);
val(s,uzel[i],code);
until code=0;
repeat
writeln('введите значение функции, соответствующее данному узлу');
readln(s);
val(s,fun[i],code);
until code=0;
end;
end;
procedure newt(var kolvo:integer; D:real; var koef,uzel,fun:mas)
var L,P:real;
begin
L:=fun[0];
P:=1;
for i:=1 to kolvo do
begin
P:=P*(D-uzel[i-1]);
for j:=1 to kolvo-i do
begin
fun[j]:=(fun[j-1]-fun[j])/(uzel[j+i]-uzel[i])
end;
koef[i]:=fun[0];
L:=L+P*fun[0];
end;
end;
procedure newt(var kolvo:integer; D:real; var koef,uzel,fun:mas) {процедура интерполяции функции методом Ньютона}
var L,P:real;
begin
L:=fun[0];
P:=1;
for i:=1 to kolvo do
begin
P:=P*(D-uzel[i-1]);
for j:=1 to kolvo-i do
begin
fun[j]:=(fun[j-1]-fun[j])/(uzel[j+i]-uzel[i])
end;
koef[i]:=fun[0];
L:=L+P*fun[0];
end;
end;
procedure zapisb(koef:mas; uzel,fun:mas; kolvo:integer; var f:text);
{В данной процедуре осуществляется запись в файл данных и результата}
var i:integer;
begin
assign(f,'interpol.txt');
rewrite(f);
for i:=0 to kolvo do writeln(f,'x= ',uzel[i]:8:4,' f(x)=',fun[i]:8:4);
writeln(f,'Интерполяционный полином');
write(f,'p(x)=',koef[0]:8:4);
for i:=1 to kolvo do if i>1 then write (f,'+(',koef[i]:8:4,')*x^',i)
else write (f,'+(',koef[i]:8:4,')*x');
close(f);
end;
procedure vblvod(var f1,f2:text);
{Вывод содержимого записанного файла на экран}
var s1:string;
begin
clrscr;
assign(f1,'interpol.txt');
reset(f1);
assigncrt(f2);
rewrite(f2);
while not eof(f1) do
assigncrt(f2);
rewrite(f2);
while not eof(f1) do
begin
Readln(f1,s1);
writeln(f2,s1);
end;
close(f2);
close(f1);
end;
procedure grafik(kolvo:integer; uzlbl,funktsiya:mas; c:mas);
{Построение графика полученной функции}
var driver,mode,Err,a1,b1,z,i,j:integer; s:string; xt,yt:real;
begin
driver:=detect;
InitGraph(driver,mode,'d:\tp7\bp\bgi');
err:=graphresult;
if err<>grok then writeln('Ошибка при инициализации графического режима')
else
begin
Setcolor(9);
line(320,0,320,480);
line(0,240,640,240);
settextstyle(smallfont,horizdir,3);
setcolor(10);
outtextxy(320,245,'0');
a1:=0;
b1:=480;
z:=-10;
for i:=0 to 20 do
begin
if z<>0 then
begin
str(z,s);
setcolor(10);
outtextxy(a1,245,s);
outtextxy(325,b1,s);
setcolor(8);
line(0,b1,640,b1);
line(a1,0,a1,480);
end;
outtextxy(325,b1,s);
setcolor(8);
line(0,b1,640,b1);
line(a1,0,a1,480);
end;
a1:=a1+32;
b1:=b1-24;
z:=succ(z);
end;
setcolor(5);
for i:=0 to kolvo do
begin
xt:=uzlbl[i];
yt:=funktsiya[i];
putpixel(round(320+xt*32),round(240-yt*24),5);
end;
moveto(round(320+uzlbl[0]*32),round(240-funktsiya[0]*24));
setcolor(11);
for i:=0 to kolvo do
begin
xt:=uzlbl[i];
yt:=0;
for j:=0 to kolvo do yt:=yt+c[j]*vozvedenie_v_stepenb(uzlbl[i],j);
lineto(round(320+xt*32),round(240-yt*24));
moveto(round(320+xt*32),round(240-yt*24));
end;
readln;
closegraph;
end;
end;
{Основная часть программы}
BEGIN
CLRSCR;
Writeln('Программа осуществляет интерполирование функции, заданной в узлах');
Vvod(N,X,Y);
writeln(‘введите значение промежуточной точки’);
readln(d1);
2.7 Тестовый пример
writeln('Нажмите Enter');
readln;
newt(N,d1,X,Y,koef_polinoma);
zapisb(koef_polinoma,x,y,n,fail);
vblvod(fail,fail1);
writeln('Нажмите Enter для просмотра графика функции, затем еще раз для выхода из программы');
readln;
grafik(N,X,Y,koef_polinoma);
END.
readln(d1);
writeln('Нажмите Enter');
readln;
newt(N,d1,X,Y,koef_polinoma);
zapisb(koef_polinoma,x,y,n,fail);
vblvod(fail,fail1);
writeln('Нажмите Enter для просмотра графика функции, затем еще раз для выхода из программы');
readln;
grafik(N,X,Y,koef_polinoma);
END.
Дана табличная функция:
Вычислить разделенные разности 1-го, 2-го, 3-го порядков (n=3) и занести их в диагональную таблицу.
Разделенные разности первого порядка:

Разделенные разности второго порядка:

Разделенная разность третьего порядка:

Интерполяционный многочлен Ньютона для заданной табличной функции имеет вид:

График интерполяционного многочлена будет таким:
procedure zapisb(koef:mas; uzel,fun:mas; kolvo:integer; var f:text);
{В данной процедуре осуществляется запись в файл данных и результата}
var i:integer;
begin
assign(f,'interpol.txt');
rewrite(f);
for i:=0 to kolvo do writeln(f,'x= ',uzel[i]:8:4,' f(x)=',fun[i]:8:4);
writeln(f,'Интерполяционный полином');
write(f,'p(x)=',koef[0]:8:4);
for i:=1 to kolvo do if i>1 then write (f,'+(',koef[i]:8:4,')*x^',i)
else write (f,'+(',koef[i]:8:4,')*x');
close(f);
end;
procedure vblvod(var f1,f2:text);
{Вывод содержимого записанного файла на экран}
var s1:string;
begin
clrscr;
assign(f1,'interpol.txt');
reset(f1);
assigncrt(f2);
rewrite(f2);
while not eof(f1) do
begin
Readln(f1,s1);
writeln(f2,s1);
end;
close(f2);
close(f1);
end;
procedure grafik(kolvo:integer; uzlbl,funktsiya:mas; c:mas);
{Построение графика полученной функции}
var driver,mode,Err,a1,b1,z,i,j:integer; s:string; xt,yt:real;
begin
driver:=detect;
InitGraph(driver,mode,'d:\tp7\bp\bgi');
err:=graphresult;
if err<>grok then writeln('Ошибка при инициализации графического режима')
else
begin
Setcolor(9);
line(320,0,320,480);
line(0,240,640,240);
settextstyle(smallfont,horizdir,3);
setcolor(10);
outtextxy(320,245,'0');
a1:=0;
b1:=480;
z:=-10;
for i:=0 to 20 do
begin
if z<>0 then
3. Среднеквадратическое приближение функции
3.1 Постановка задачи
Разработать схему алгоритма и написать программу на языке Turbo Pascal 7.0 для выполнения среднеквадратического приближения функции, заданной в узлах.
3.2 Математическая формулировка задачи
Пусть имеется множество
функций
 ,
принадлежащих линейному пространству
функций. Под близостью в среднем
интерполируемой и интерполирующей
функций будем понимать результат оценки
интеграла
,
принадлежащих линейному пространству
функций. Под близостью в среднем
интерполируемой и интерполирующей
функций будем понимать результат оценки
интеграла
 , (3.1)
, (3.1)
где
 - весовая функция.
- весовая функция.
Такое приближение называют среднеквадратичным.
3.3 Обзор существующих численных методов решения задачи
Задача среднеквадратичного приближения возникает во многих областях прикладных исследований, например, при статистической обработке данных эксперимента с использованием регрессивного анализа, при оценивании параметров моделей, в задачах фильтрации и т.п.
Когда уровень неопределенности в задании приближаемой функции f(x>i>), i=1..m, достаточно велик, что характерно для обработки экспериментальных данных, бессмысленно требовать выполнения условий интерполирования; кроме того, число точек задания функции f(x>i>) часто весьма велико. Все это делает применение интерполирования мало перспективным по причинам плохой обусловленности задачи высокой размерности и проблем сходимости процесса интерполяции
Одной из наиболее простых и, поэтому, широко используемых приближающих функций является алгебраический полином
Метод среднеквадратичного приближения обеспечивает построение полинома Pn(x), исходя из минимизации величины
Рассмотренный метод приближения минимизирует среднеквадратичное уклонение аппроксимирующего полинома от аппроксимируемой функции, но не гарантирует от значительных локальных ошибок. Для предотвращения подобной возможности используют полиномы наилучшего равномерного приближения.
в пространстве параметров a>0 >, a>1 >,...,a>n. >Существуют различные подходы к решению задачи минимизации функции D(a). Простейший из них приводит к необходимости решения нормальной системы линейных алгебраических уравнений
Однако, уже при n > 5 матрица такой системы оказывается настолько плохо обусловленной, что полученные из (3.4) значения a>j>> >оказываются мало пригодными для вычисления P>n>(x). Поэтому, при необходимости построения полиномов наилучшего среднеквадратичного приближения более высоких степеней применяют другие алгоритмы, например, метод сингулярного разложения.
3.4 Численный метод решения задачи
Можно рассмотреть две задачи:
1 - подобрать функцию
так, чтобы выполнялось неравенство
 ; (3.5)
; (3.5)
2 - найти наилучшее
приближение, т.е. такую функцию
 , чтобы было справедливым соотношение
, чтобы было справедливым соотношение
 . (3.6)
. (3.6)
Далее займемся отысканием наилучшего приближения.
Разложим функцию
по системе линейно независимых функций
 :
:
 . (3.7)
. (3.7)
В дальнейшем для сокращения
записи будем пользоваться определением
скалярного произведения в пространстве
функций
 :
:
 .
.
Подставляя (3.7) в условие (3.6), получим
 .
.
Дифференцируя это выражение
по
 и приравнивая производные нулю, получим
и приравнивая производные нулю, получим
 . (3.8)
. (3.8)
Определитель этой системы
есть определитель Грама функций
.
В силу их линейной независимости этот
определитель не равен нулю. Следовательно,
из системы (3.8) можно найти коэффициенты
,
определяющие функцию
согласно (3.6) и минимизирующие интеграл
от погрешности
 . Таким образом, наилучшее среднеквадратичное
приближение существует и оно единственно.
. Таким образом, наилучшее среднеквадратичное
приближение существует и оно единственно.
При использовании
ортонормированной системы функций
система (3.8) упрощается:
 ,
,
т.е.
являются коэффициентами Фурье, а
наилучшее приближение есть ряд Фурье,
обрываемый на каком-то члене.
Доказано, что в любом линейно нормированном пространстве при линейной аппроксимации вида (3.4) наилучшее приближение существует, хотя оно может быть не единственным.
В тех случаях, когда
функции
не ортогональны, при
 определитель Грама уменьшается,
приближаясь к нулю. Тогда система
становится плохо обусловленной и ее
решение дает большую погрешность. В
этой ситуации обычно берут не более
пяти-шести членов в сумме (3.7).
определитель Грама уменьшается,
приближаясь к нулю. Тогда система
становится плохо обусловленной и ее
решение дает большую погрешность. В
этой ситуации обычно берут не более
пяти-шести членов в сумме (3.7).
В качестве
чаще всего используют полиномы Лежандра,
Чебышева, Лагерра, Эрмита, ортогональные
с заданным весом.
Рассмотрим частный случай, когда необходимо найти наилучшее приближение функции, заданной таблично. Для вещественных функций, заданных на конечном множестве точек, скалярное произведение определяется формулой
 , (3.9)
, (3.9)
где
 -
число заданных узлов.
-
число заданных узлов.
Условие наилучшего среднеквадратичного приближения записывается следующим образом:
 . (3.10)
. (3.10)
Полагая
,
где
 ,
и подставляя этот многочлен в (3.10), придем
к системе (3.8), в которой скалярные
произведения вычисляют согласно (3.9).
Описанная процедура аппроксимации
носит название метода наименьших
квадратов.
,
и подставляя этот многочлен в (3.10), придем
к системе (3.8), в которой скалярные
произведения вычисляют согласно (3.9).
Описанная процедура аппроксимации
носит название метода наименьших
квадратов.
Наиболее употребительный
вариант метода наименьших квадратов
соответствует случаю степенного вида
функций
,
т.е.
 ,
причем
,
причем
 .
.
Система уравнений (3.8) при этом принимает вид
 ,
, (3.11)
,
, (3.11)
где
 .
.
3.5 Схема алгоритма
Рис. 3.1 Основная программа
Рис. 3.2 Процедура ввода данных
Рис 3.3 Процедура среднеквадратичного приближения
program srpribl; {$R+}
uses graph;
label 1,2,3,4;
const m=2;
type mas= array [1..21] of real;
mas1= array [1..m] of real;
mas2= array [1..m,1..m+1] of real;
var i,j:byte;
y1,x1:mas;
xx1:mas1;
a1:mas2;
procedure vvod (x,y: mas);
begin
x[1]:=0;y[1]:=0.290234387293458; x[2]:=0.25;y[2]:=0.201247759722173;
x[3]:=0.5;y[3]:=0.0712686786428094;x[4]:=0.75; y[4]:=0.044294935464859;
x[5]:=1;y[5]:=-0.0745576142333448; x[6]:=1.25;y[6]:=-0.0807833694852889;
x[7]:=1.5;y[7]:=-0.233371530473232;x[8]:=1.75;y[8]:=-0.283957027737051;
x[9]:=2;y[9]:=-0.308697660081089;x[10]:=2.25;y[10]:=-0.42091366359964;
x[11]:=2.5;y[11]:=-0.516991161741316;x[12]:=2.75;y[12]:=-0.427710095947851;
x[13]:=3;y[13]:=-0.374748698528856;x[14]:=3.25;y[14]:=-0.229905794281513;
x[15]:=3.5;y[15]:=-0.205365492492496639;x[16]:=3.75;y[16]:=-0.129155068378896;
x[17]:=4;y[17]:=-0.0438349825330079;x[18]:=4.25;y[18]:=0.0294586319476366;
x[19]:=4.5;y[19]:=0.132592592108995;x[20]:=4.75;y[20]:=0.206369574274868;
x[21]:=5;y[21]:=0.26959548862651;
end;
procedure srpribl (xx:mas1;a:mas2);
var l:real;
s,z,k1:integer;
begin
for s:=1 to m-1 do
for z:=s+1 to m do
begin
a[z,s]:=-a[z,s]/a[s,s];
for k1:=s+1 to m+1 do a[z,k1]:=a[z,k1]+a[z,s]*a[s,k1]
end;
xx[m]:=a[m,m+1]/a[m,m]; writeln(' xx[',m,']=',xx[m]:2:3);
for i:=m-1 downto 1 do
begin
l:=a[i,m+1];
for j:=i+1 to m do l:=l-xx[j]*a[i,j];
xx[i]:=l/a[i,i]; writeln(' xx[',i,']=',xx[i]:2:3)
end
end;
procedure Grafik (var x,y:mas;xx:mas1)
var ec,gd,gm:integer;
begin
gd:=detect;
initgraph (gd,gm,' ');
ec:=graphresult;
if ec<>grok then begin
writeln ('Oshibka v inicializacii grafika');
halt (1);
end;
setcolor(white);
line (0,420,620,420);
line (0,0,0,420);
setcolor (white);
for i:=1 to 21 do begin
circle (round (x[i]*150),round (y[i]*100),1);
end;
setcolor (yellow);
for i:=1 to m do begin
circle (round (x[i]*150),round (xx[i]*100),1);
end;
setcolor (green);
for i:=2 to m do begin
line (round (x[i-1]*150),round(xx[i-1]*100),round (x[i]*150),
round (xx[i]*100));
end;
end;
begin
vvod(x1,y1);
for i:=1 to 2 do
for j:=1 to 3 do a[i,j]:=0;
a[1,1]:=21;
for i:=1 to 21 do
begin
a[1,2]:=a[1,2]+x[i];
a[2,1]:=a[2,1]+x[i];
a[2,2]:=a[2,2]+x[i]*x[i];
a[1,3]:=a[1,3]+y[i];
a[2,3]:=a[2,3]+y[i]*x[i]
end;
srpribl(xx1,a1);
for i:=1 to 21 do
writeln(y[i]:2:3,' ',xx[1]+xx[2]*x[i]:2:3);
Grafik(x1,y1,xx1);
end.
3.7 Тестовый пример
Найти
тригонометрический многочлен наилучшего
среднеквадратичного приближения
наименьшей степени со среднеквадратичным
отклонением меньшим
 для
функции
для
функции

Введем
функцию


Вычислим коэффициенты Фурье

Вычислим частичные суммы ряда Фурье

Вычислим среднеквадратичное отклонение

Найдем
минимальное
 ,
при котором
,
при котором
 будет
меньше
будет
меньше


Следовательно
многочлен степени
 является
наименьшим многочленом, удовлетворяющим
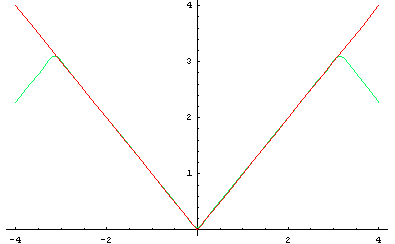
нашим условиям. Построим график этого
многочлениа и исходной функции
является
наименьшим многочленом, удовлетворяющим
нашим условиям. Построим график этого
многочлениа и исходной функции


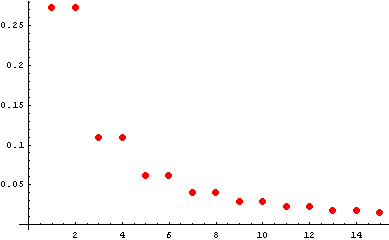
Построим график среднеквадратичного отклонения



Найдем
минимальное
,
при котором
будет
меньше
Следовательно,
многочлен степени
является
наименьшим многочленом, удовлетворяющим
нашим условиям. Построим график этого
многочлениа и исходной функции
Построим график среднеквадратичного отклонения
4. Численное интегрирование функций методом Гаусса
4.1 Постановка задачи
Разработать схему алгоритма и написать программу на языке Turbo Pascal 7.0 для вычисления интегралов функции, используя метод Гаусса.
4.2 Математическая формулировка задачи
Пусть функция задана на
стандартном интервале
 .
Задача состоит в том, чтобы подобрать
точки
.
Задача состоит в том, чтобы подобрать
точки
 и коэффициенты
и коэффициенты
 так, чтобы квадратурная формула
так, чтобы квадратурная формула
была точной для всех полиномов наивысшей возможной степени.
4.3 Обзор существующих численных методов решения задачи
Одномерный случай
Основная идея большинства методов численного интегрирования состоит в замене подынтегральной функции на более простую, интеграл от которой легко вычисляется аналитически. При этом для оценки значения интеграла получаются формулы вида
где
 —
число точек, в которых вычисляется
значение подынтегральной функции. Точки
—
число точек, в которых вычисляется
значение подынтегральной функции. Точки
 называются узлами метода, числа
называются узлами метода, числа
 —
весами узлов. При замене подынтегральной
функции на полином нулевой, первой и
второй степени получаются соответственно
методы прямоугольников, трапеций и
парабол (Симпсона). Часто формулы для
оценки значения интеграла называют
квадратурными формулами.
—
весами узлов. При замене подынтегральной
функции на полином нулевой, первой и
второй степени получаются соответственно
методы прямоугольников, трапеций и
парабол (Симпсона). Часто формулы для
оценки значения интеграла называют
квадратурными формулами.
Метод прямоугольников
Метод
прямоугольников получается
при замене подынтегральной функции на
константу. В качестве константы можно
взять значение функции в любой точке
отрезка
 .
Наиболее часто используются значения
функции в середине отрезка и на его
концах. Соответствующие модификации
носят названия методов средних
прямоугольников, левых
прямоугольников и правых
прямоугольников. Формула
для приближенного вычисления значения
определённого интеграла методом
прямоугольников имеет вид
.
Наиболее часто используются значения
функции в середине отрезка и на его
концах. Соответствующие модификации
носят названия методов средних
прямоугольников, левых
прямоугольников и правых
прямоугольников. Формула
для приближенного вычисления значения
определённого интеграла методом
прямоугольников имеет вид
 ,
,
где
 ,
,
 или
или
 ,
соответственно.
,
соответственно.
Метод трапеций
Если функцию на каждом из частичных отрезков аппроксимировать прямой, проходящей через конечные значения, то получим метод трапеций.
Площадь трапеции на каждом отрезке:

Погрешность аппроксимации на каждом отрезке:
 ,
где
,
где

Полная формула трапеций в случае деления всего промежутка интегрирования на отрезки одинаковой длины h:
 ,
,
где

Погрешность формулы трапеций:
 ,
где
,
где
Метод парабол (метод Симпсона)
Использовав три точки отрезка интегрирования можно заменить подынтегральную функцию параболой. Обычно в качестве таких точек используют концы отрезка и его среднюю точку. В этом случае формула имеет очень простой вид
 .
.
Если разбить интервал интегрирования на 2N равных частей, то имеем
 ,
,
где
 .
.
Если разбить интервал интегрирования на 2N равных частей, то имеем
,
где
.
Увеличение точности
Приближение функции одним полиномом на всем отрезке интегрирования, как правило, приводит к большой ошибке в оценке значения интеграла.
Для уменьшения погрешности отрезок интегрирования разбивают на части и применяют численный метод для оценки интеграла на каждой из них.
При стремлении количества разбиений к бесконечности, оценка интеграла стремится к его истинному значению для любого численного метода.
Приведённые выше методы допускают простую процедуру уменьшения шага в два раза, при этом на каждом шаге требуется вычислять значения функции только во вновь добавленных узлах. Для оценки погрешности вычислений используется правило Рунге.
Метод Гаусса
Описанные
выше методы используют фиксированные
точки отрезка (концы и середину) и имеют
низкий порядок точности (0 --- методы
правых и левых прямоугольников, 1 ---
методы средних прямоугольников и
трапеций, 3 --- метод парабол (Симпсона)).
Если мы можем выбирать точки, в которых
мы вычисляем значения функции
 ,
то можно при том же количестве вычислений
подынтегральной функции получить методы
более высокого порядка точности. Так
для двух (как в методе трапеций) вычислений
значений подынтегральной функции, можно
получить метод уже не 1-го, а 3-го порядка
точности:
,
то можно при том же количестве вычислений
подынтегральной функции получить методы
более высокого порядка точности. Так
для двух (как в методе трапеций) вычислений
значений подынтегральной функции, можно
получить метод уже не 1-го, а 3-го порядка
точности:
 .
.
В
общем случае, используя
точек,
можно получить метод с порядком точности
 .
Значения узлов метода Гаусса по
точкам
являются корнями полинома Лежандра
степени
.
.
Значения узлов метода Гаусса по
точкам
являются корнями полинома Лежандра
степени
.
Значения узлов метода Гаусса и их весов приводятся в справочниках специальных функций. Наиболее известен метод Гаусса по пяти точкам.
В
общем случае, используя
точек,
можно получить метод с порядком точности
.
Значения узлов метода Гаусса по
точкам
являются корнями полинома Лежандра
степени
.
Значения узлов метода Гаусса и их весов приводятся в справочниках специальных функций. Наиболее известен метод Гаусса по пяти точкам.
Метод Гаусса-Кронрода
Недостаток метода Гаусса состоит в том, что он не имеет лёгкого (с вычислительной точки зрения) пути оценки погрешности полученного значения интеграла. Использование правила Рунге требует вычисления подынтегральной функции примерно в таком же числе точек, не давая при этом практически никакого выигрыша точности, в отличие от простых методов, где точность увеличивается в разы при каждом новом разбиении. Кронродом был предложен следующий метод оценки значения интеграла
 ,
,
где
—
узлы метода Гаусса по
точкам,
а
 параметров
параметров
 ,
,
 ,
,
 подобраны
таким образом, чтобы порядок точности
метода был равен
подобраны
таким образом, чтобы порядок точности
метода был равен
 .
.
Тогда для оценки погрешности можно использовать эмпирическую формулу:
 ,
,
где
 —
приближённое значение интеграла,
полученное методом Гаусса по
точкам.
—
приближённое значение интеграла,
полученное методом Гаусса по
точкам.
4.4 Численный метод решения задачи
Пусть функция задана на
стандартном интервале
.
Задача состоит в том, чтобы подобрать
точки
и коэффициенты
так, чтобы квадратурная формула
(4.1)
была точной для всех полиномов наивысшей возможной степени.
Ввиду того, что имеется
 параметров
параметров
 и
и

 ,
а полином степени
,
а полином степени
 определяется
коэффициентами, эта наивысшая степень
в общем случае
определяется
коэффициентами, эта наивысшая степень
в общем случае
 .
.
Запишем полином в виде
 и подставим в (4.1). Получим
и подставим в (4.1). Получим
 ,
,
 .
.
Приравнивая выражения
при одинаковых коэффициентах
получим
 ,
,
 ,
,
 ,
,
 .
.

Итак,
и
находят из системы
уравнений
 ,
,
 ,
,
 , (4.2)
, (4.2)
. . . . . . .
 .
.
Система (4.2) нелинейная,
и ее решение найти довольно трудно.
Рассмотрим еще один прием нахожденияи
.
Свойства полиномов Лежандра
 ,
,
таковы:
1)
 ,
;
,
;
2)
 ;
;
3) полином Лежандра
 имеет
имеет
 различных и действительных корней,
расположенных на интервале
.
различных и действительных корней,
расположенных на интервале
.
Составим по узлам
интегрирования многочлен
-й
степени
 .
.
Функция
 при
при
 есть многочлен степени не выше
.
Значит для этой функции формула Гаусса
справедлива:
есть многочлен степени не выше
.
Значит для этой функции формула Гаусса
справедлива:
 , (4.3)
, (4.3)
так как
 .
.
Разложим
 в ряд по ортогональным многочленам
Лежандра:
в ряд по ортогональным многочленам
Лежандра:
 ,
,
 ,
,
,
т.е. все коэффициенты
 при
. Значит
с точностью до численного множителя
совпадает с
.
Таким образом, узлами формулы Гаусса
являются нули многочлена
Лежандра степени
.
при
. Значит
с точностью до численного множителя
совпадает с
.
Таким образом, узлами формулы Гаусса
являются нули многочлена
Лежандра степени
.
Зная
,
из линейной теперь системы первых
(4.2) легко найти коэффициенты являются
нули многочлена Лежандра степени
.
Зная
,
из линейной теперь системы первых
(4.2) легко найти коэффициенты
.
Определитель этой системы есть
определитель Вандермонда.
Формулу
 ,
в которой
-
нули полинома Лежандра
,
в которой
-
нули полинома Лежандра
 ,
а
,
а
 определяют из (3.3), называют квадратурной
формулой Гаусса.
определяют из (3.3), называют квадратурной
формулой Гаусса.
4.5 Схема алгоритма

Рис. 4.1 Основная программа метода

Рис .4.2 Интегрирование методом Гаусса
Рис 4.3 Процедура подсчета коэффициентов по методу Гаусса
4.6 Текст программы
uses crt,graph;
var aaa,bbb,kkk:real;
const
g10c1=0.9739065285/6.2012983932;
g10c2=0.8650633667/6.2012983932;
g10c3=0.6794095683/6.2012983932;
g10c4=0.4333953941/6.2012983932;
g10c5=0.1488743390/6.2012983932;
g10x1=0.0666713443/6.2012983932;
g10x2=0.1494513492/6.2012983932;
g10x3=0.2190863625/6.2012983932;
g10x4=0.2692667193/6.2012983932;
g10x5=0.2955242247/6.2012983932;
function F(x:real):real;{интегрируемая функция}
begin
F:= ln(1+x*x*x);
end;
function gauss_calc(a,b:real):real; {метод Гаусса}
var n,m,s,s1,s2,s3,s4,s5 :real;
begin
m:=(b+a)/2; n:=(b-a)/2;
s1:=g10c1*(f(m+n*g10x1)+f(m-n*g10x1));
s2:=g10c2*(f(m+n*g10x2)+f(m-n*g10x2));
s3:=g10c3*(f(m+n*g10x3)+f(m-n*g10x3));
s4:=g10c4*(f(m+n*g10x4)+f(m-n*g10x4));
s5:=g10c5*(f(m+n*g10x5)+f(m-n*g10x5));
s:=s1+s2+s3+s4+s5;
gauss_calc:=s*(b-a);
end;
{рекурсивная ф-ция подсчета с заданной точностью}
{ gc - ранее посчитаный интеграл на интервале (a,b)}
function gauss(a,b,eps,gc:real):real;
var t,ga,gb :real;
begin
t:=(a+b)/2; {разбиваем интервал на две половинки}
ga:=gauss_calc(a,t); {в каждой половинке считаем интеграл}
gb:=gauss_calc(t,b);
if abs(ga+gb-gc)>eps then {проверяем точность вычислений}
begin
ga:=gauss(a,t,eps/2,ga); {рекурсия для первой половинки}
gb:=gauss(t,b,eps/2,gb); {рекурсия для второй половинки}
end; {при этом точность повышаем, чтобы }
{при сложении ошибка не накапливалась}
gauss:=ga+gb; {интеграл = сумме интегралов половинок}
end;
procedure inputnum(prm:string;var num:real;lb,ub:real);
var q:boolean;
begin
repeat
write('Введите ',prm,' ');readln(num);
q:=(lb>=num) or (num>ub);
if q then writeln('Число должно быть от ', lb:0:0,' до ',ub:0:0);
until not q;
end;
function main_menu:integer;
var i:integer;
begin
Writeln('==========================================================');
Writeln('0 - выход');
Writeln('1 - решать тестовый пример a=0 b=1.2 k=10 eps = 0.0001');
Writeln('2 - решать пример с произвольными a, b, k, eps');
Writeln('----------------------------------------------------------');
Write('Выбор >>> ');readln(i);
Writeln('==========================================================');
main_menu:=i;
end;
{Вывод графика}
procedure outputgraph(a,b,a1,b1:real;n:integer);
var i,j,j1,k:integer;t,y1,y2,x1,x2,x,y:double;s:string;
begin
clearviewport;
x1:=a1-1;x2:=b1+1;
if x1<0.5 then x1:=-0.5;
y2:=f(ln(bbb/aaa)/(bbb-aaa))*1.2;
y1:=-y2;
{Линия y=0}
setcolor(15);
y:=0;
j:=trunc(480*(y-y2)/(y1-y2));
line(0,j,639,j);
{Линии x=a,x=b}
setcolor(5);
j:=trunc(480*(-y2)/(y1-y2));
i:=trunc(640*(a-x1)/(x2-x1));
j1:=trunc(480*(f(a)-y2)/(y1-y2));
line(i,j,i,j1);
i:=trunc(640*(b-x1)/(x2-x1));
j:=trunc(480*(-y2)/(y1-y2));
j1:=trunc(480*(f(b)-y2)/(y1-y2));
line(i,j,i,j1);
{Сам график}
setcolor(14);
setlinestyle(0,0,3);
t:=(b-a)/n;
k:=0;
j1:=trunc(480*(-y2)/(y1-y2));
for i:=0 to 640 do begin
x:=(x2-x1)*i/640+x1;
y:=f(x);
j:=trunc(480*(y-y2)/(y1-y2));
if j>479 then j:=479;
if j<0 then j:=0;
setcolor(14);
setlinestyle(0,0,3);
if i=0 then moveto(i,j) else lineto(i,j);
setcolor(8);
if (x>t*k+a) then begin
k:=k+1;
setcolor(15);
end;
k:=0;
j1:=trunc(480*(-y2)/(y1-y2));
for i:=0 to 640 do begin
x:=(x2-x1)*i/640+x1;
y:=f(x);
j:=trunc(480*(y-y2)/(y1-y2));
if j>479 then j:=479;
if j<0 then j:=0;
setcolor(14);
setlinestyle(0,0,3);
if i=0 then moveto(i,j) else lineto(i,j);
setcolor(8);
if (x>t*k+a) then begin
k:=k+1;
setcolor(15);
end;
setlinestyle(0,0,1);
if (x>=a) and (x<=b) then line(i,j,i,j1);
end;
setcolor(15);
y:=f(b);
i:=trunc(640*(b-x1)/(x2-x1));
j:=trunc(480*(y-y2)/(y1-y2));
line(i,j,i,j1);
setlinestyle(0,0,1);
setcolor(12);
{Подписи}
setcolor(13);
str(a:6:6,s);
s:='a='+s;
i:=trunc(640*(a-x1)/(x2-x1));
outtextxy(i,j1+2,s);
str(b:6:6,s);
s:='b='+s;
i:=trunc(640*(b-x1)/(x2-x1));
outtextxy(i-10,j1+2,s);
setcolor(15);
y:=0;
j:=trunc(480*(y-y2)/(y1-y2));
outtextxy(5,j+3,'y=0');
readkey;
end;
procedure equateit(eps:real);
var integral,a,b:real;i,j:integer;
begin
a:=0;b:=1;
Integral:=gauss(a,b,eps,gauss_calc(a,b));
writeln('Интеграл = ',integral:0:6);
readkey;
i:=vga;j:=vgahi;
initgraph(i,j,'..\bgi');
outputgraph(a,(b+a)/2,a,b,1);
outputgraph((b+a)/2,b,a,b,1);
outputgraph(a,b,a,b,1);
closegraph;
end;
var sel:integer;
eps:real;
begin
repeat
clrscr;
sel:=main_menu;
case sel of
1:begin
aaa:=0.1;bbb:=1.2;kkk:=10;
eps:=1e-4;
equateit(eps);
end;
2:begin
inputnum('a',aaa,0,1000);
inputnum('b',bbb,-1000,1000);
inputnum('k',kkk,-1000,1000);
inputnum('точность',eps,0.000000001,1);
equateit(eps);
end;
end;
until sel=0;
end.
i:=vga;j:=vgahi;
initgraph(i,j,'..\bgi');
outputgraph(a,(b+a)/2,a,b,1);
outputgraph((b+a)/2,b,a,b,1);
outputgraph(a,b,a,b,1);
closegraph;
end;
var sel:integer;
eps:real;
begin
repeat
clrscr;
sel:=main_menu;
case sel of
1:begin
aaa:=0.1;bbb:=1.2;kkk:=10;
eps:=1e-4;
equateit(eps);
end;
2:begin
inputnum('a',aaa,0,1000);
inputnum('b',bbb,-1000,1000);
inputnum('k',kkk,-1000,1000);
inputnum('точность',eps,0.000000001,1);
equateit(eps);
end;
end;
until sel=0;
end.
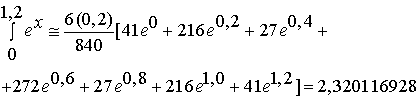
4.7 Тестовый пример
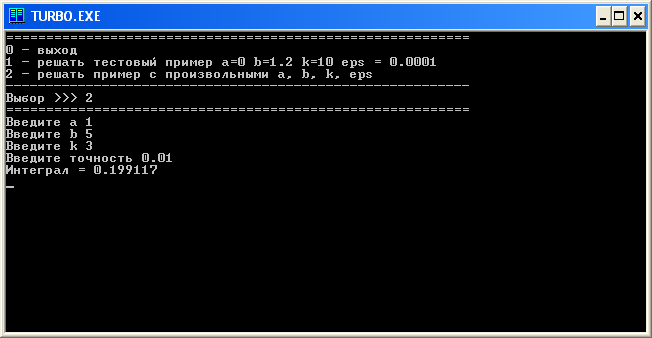
Используя
семиточечную формулу вычислить интеграл
 .
.
(Точное решение - 2,3201169227)




Заключение
В данной работе описаны и реализованы с помощью блок-схем и языка программирования Turbo Pascal базовые задачи вычислительной математики: решение систем линейных алгебраических уравнений, полиномиальная интерполяция, среднеквадратичное приближение функции, численное интегрирование функций. Представленные методы и реализованные алгоритмы достаточно просты, но в тоже время эффективны для большого количества задач.
Список использованных источников
Бахвалов Н., Жидков Н., Кобельков Г. Численные методы. М.: Лаборатория базовых знаний, 2001. 632 с.
Вержбицкий В.М., Численных методы. Линейная алгебра и нелинейные уравнения. М.: Высшая школа, 2000. 266 с.
Вержбицкий В.М., Основы численных методов. М.: Высшая школа, 2002. 840 с.
Пирумов У.Г. Численные методы . М.: Дрофа, 2003. 224 с.
Буслов В.А., Яковлев С.Л. Яисленные методы и решение уравнений. Санкт-Петербург, 2001. 44 с.
Фаронов В.В. Турбо Паскаль 7.0. Начальный курс. Учебное пособие. – М.: Нолидж, 1997. – 616 с.