Радиолокация: обнаружение и распознавание. Средства постановки помех и помехозащиты РЛС
Введение
Современные вооружение и военная техника (ВиВТ) характеризуются высокой насыщенностью радиоэлектронным оборудованием, обеспечивающим решение задач автоматического или автоматизированного ведения разведки, связи, управления и наведения оружия. Устанавливаемые на ВиВТ радиоэлектронные средства (РЭС) позволяют получить своевременные и достаточные сведения о противнике в определенном районе и быстро реагировать на изменение боевой обстановки. В качестве информационных каналов РЭС используется электромагнитное излучение в диапазоне от единиц килогерц до десятков и сотен гигагерц, то есть большая часть спектра частот, освоенного техническими средствами.
Концепция ведения боевых действий в последние десятилетия подразумевает создание глобальных стратегических и тактических систем разведки и управления войсками, а также высокоточного оружия (ВТО), обеспечивающего автоматическое наведение и поражение военных и гражданских объектов. Современные образцы ВТО позволяют с минимальными потерями уничтожать наземные, морские и воздушные средства нападения, что подтверждают события последних региональных конфликтов. Снижение эффективности средств поражения достигается подавлением и/или разрушением информационных каналов ВТО. Для решения этих задач применяются средства радиоэлектронной борьбы (РЭБ), которые обеспечивают блокирование каналов передачи данных (путем создания помех) или их разрушение.
Одним из важнейших направлений РЭБ является нарушение правильного функционирования радиолокационных станций (РЛС) систем противовоздушной обороны (ПВО), позволяющих вести радиолокационную разведку воздушного пространства и выдавать полученную в ее ходе информацию на пункты управления средствами поражения (зенитно-ракетные комплексы, истребительная авиация). В результате воздействия средств РЭБ на РЛС возможно возникновение ошибок при определении наличия целей в заданной точке пространства, их количественных и качественных характеристик, координат, траектории движения, государственной принадлежности, заметно снижающее эффективность работы систем ПВО. [6, стр.13]
В данной работе рассмотрены аспекты применения основных видов помех РЛС обнаружения, возможных алгоритмов и устройств помехозащиты.
1. Анализ и формализация задачи
Задача выбора конкретных средств радиоэлектронного подавления (РЭП) базируется на основе имеющейся информации о тактико-технических характеристиках РЛС противоположной стороны. Напротив, при выборе характеристик систем помехозащиты необходимы некоторые априорные сведения о типах помех, которые вероятно будут применяться, и их энергетических параметрах. Таким образом, для проектирования систем, участвующих в радиоэлектронном конфликте, важно наличие достоверной информации о технических средствах противника.
По условию ТЗ нам необходимо спроектировать РЛС кругового обзора со следующими параметрами:
- дальность обнаружения цели не менее 270км;
- определяющая дальность и азимут
Параметры цели:
- ЭПР не менее Е=5.6 м2 ;
- скорость не более 930м/с.
Необходимо разработать алгоритмы, структурные схемы постановщика помех и средств помехозащиты радиолокационной станции, провести анализ эффективности применения средств помехопостановки и помехозащиты.
Прежде чем разрабатывать алгоритмы помехопостановки и помехозащиты необходимо знать параметры РЛС. Задача выполнения курсовой работы включает в себя:
Расчет параметров РЛС, при которых обеспечиваются требования ТЗ.
Расчет помехопостановщика.
Расчет параметров средств помехозащиты (алгоритма помехозащиты структуры и параметров).
Анализ эффективности применения комплекса помех и средств помехозащиты.
Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон.
Выбор и технико-экономическое обоснование технологической базы для реализации проекта.
Составление структурной схемы устройства и описание ее работы.
2. Расчет параметров РЛС
Поскольку при расчете характеристик средств помехозащиты и помехопостановки потребуются численные значения некоторых параметров РЛС, целесообразно найти их заранее или сделать реалистичное предположение об их величине.
Расчет параметров РЛС будет производиться в пакете программ «Стрела 2.0».
По назначению проектируемая РЛС является наземной, поэтому выберем основной режим работы когерентно-импульсный.
Высота установки антенны рассчитывается исходя из уравнения прямой видимости:

D>пред> – максимальная дальность прямой видимости,
H - высота цели,
h – высота установки антенны,
R>з> – радиус земли. R>з>=6370 км, но положительная рефракция увеличивает дальность действия РЛС, как бы отодвигая горизонт. Это можно трактовать как кажущееся увеличение радиуса Земли. Для стандартной атмосферы радиус возрастает в 4/3 раза, т. е. надо пользоваться эквивалентным радиусом Земли R>зэф>=4R>з> /3=8500 км
На Рис. 1 представлен график, показывающий, как зависит дальность прямой видимости РЛС от высоты цели при высоте установки антенны 20 м.
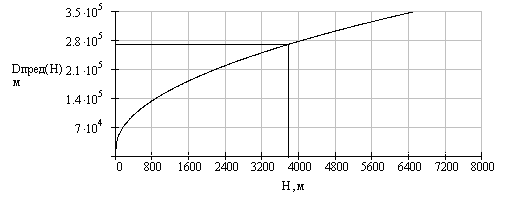
Рис. 1 - График зависимости предельной дальности прямой видимости от высоты цели, при фиксированной высоте установки антенны
Однозначно измеряемая дальность по условию ТЗ составляет 270км.
Выберем тип обработки режекция и когерентное накопление.
Тип сигнала – простой: сложные сигналы позволяют увеличить дальность действия, точность и однозначность измерения скорости(а также точность измерения угловых координат), но снижается разрешающая способность и точность измерения дальности, но так как измерение скорости в РЛС кругового обзора не предусмотрено, то в целях упрощения системы будем использовать простой сигнал.
Длина волны излучения РЛС: при выборе диапазона волн важное значение имеют особенности распространения радиоволн в атмосфере, в частности резонансное поглощение, что вынуждает избегать использования соответствующих частот, следует отметить то, что с увеличением длины волны затухание от атмосферных осадков, тумана и т.п. уменьшается, но при этом увеличиваются геометрические размеры антенной системы. Учитывая данные факторы зададимся длиной волны 300 см.
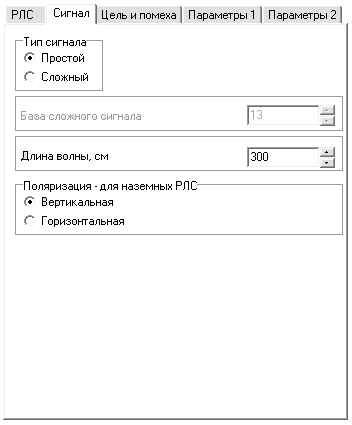
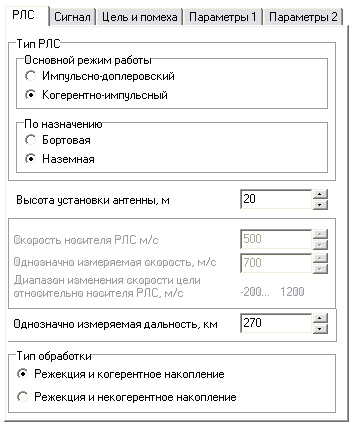
Рис. 2 - Параметры системы (РЛС и Сигнал)
ЭПР цели по условию ТЗ составляет 5.6 м2.
Угол места цели: зададим 10 градусов.
Заданная скорость цели по условию ТЗ составляет 930м/с.
Параметры помехи: расчет параметров помехи и средств помехопостановки производится в пункте 4.1
Мощность передатчика выбирается из условия обеспечения заданной энергетической дальности и составляет 350 кВт.
Коэффициент усиления антенны

 - КПД антенны
- КПД антенны
Gd - КНД антенны
Зададимся типичным КПД антенны 0.9, тогда
G = 970
Энергетическая дальность задается равной однозначно измеряемой дальности которая в соответствии с ТЗ составляет 270км.
Разрешение по дальности:зададимся 120м
Вероятность правильного обнаружения и вероятность ложной тревоги задаются исходя из стоимостей принятия ошибочного решения. Обычно задают вероятность правильного обнаружения в пределах 0.95-0.99, вероятность ложной тревоги на один канал задают в пределах 10-6-10-12. Зададим вероятность правильного обнаружения 0.99, вероятность ложной тревоги на всю систему 10-6.
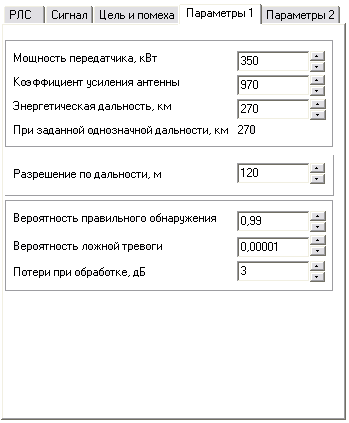
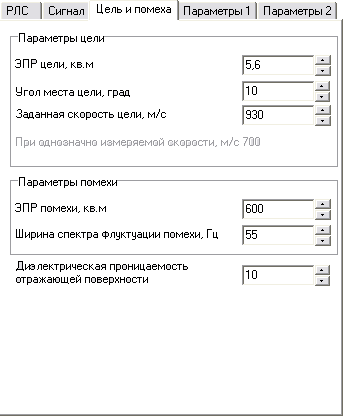
Рис. 3 - Параметры системы (Цель и помеха, Параметры 1)
Разрешение. Определяется шириной главного лепестка ДН антенны в азимутальной плоскости и составляет 1градус.
Время обзора сектора сканирования
Зададим время обзора сектора сканирования 10000 мс.
Расчет числа импульсов в пачке следует проводить исходя из времени обзора сектора сканирования.
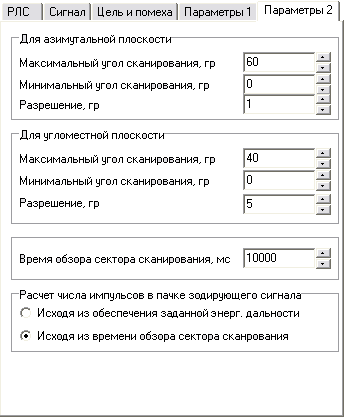
Рис. 4 - Параметры системы (Параметры 2)
Результаты расчета в программе «Стрела 2.0» изображены на рис. 5.
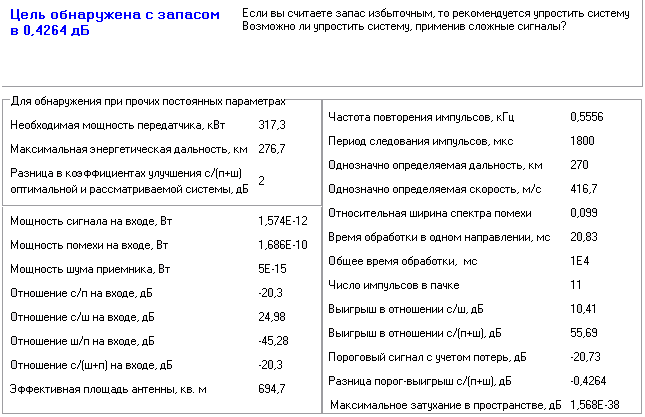
Рис. 5 - Результаты расчета РЛС в программе «Стрела 2.0»
На рис. 6 приведены графики зависимостей основных параметров РЛС.
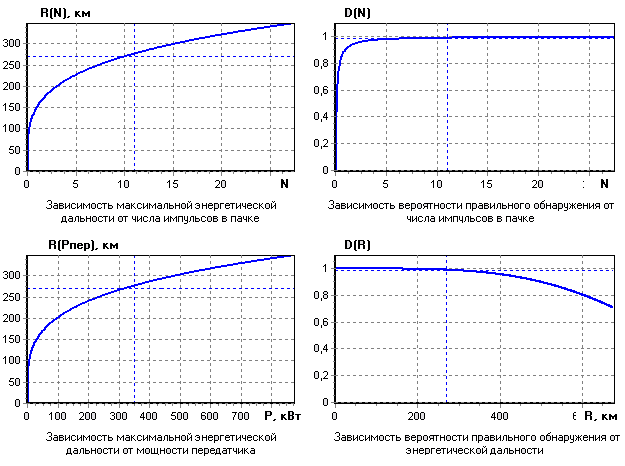
Рис. 6 - Графики зависимостей основных параметров РЛС
3. Расчет параметров помехопостановщика
3.1 Расчет параметров средств создания пассивных помех
Замаскировать свой объект, например ЛА, можно, разбрасывая в атмосфере полуволновые вибраторы или диполи, выполненные из металлизированной бумаги, алюминиевой фольги, металлизированного стекловолокна или полимерных нитей. Длину диполя выбирают несколько меньшей λ/2. Степень укорочения длины диполя l зависит от его поперечных размеров (диаметра d для круглых диполей или ширины b для плоских). Коэффициент укорочения l/d для круглых диполей и 41/b для плоских обычно лежит в пределах 0,46 - 0,48. Заготовленные диполи укладывают в специальные пакеты или капсулы и при необходимости маскировки объекта выбрасывают или выстреливают их в атмосферу. При раскрытии упаковки диполи рассеиваются, образуя медленно снижающееся облако так называемых «дипольных помех» [1, стр.155]. В облаке диполей их ориентация становится произвольной, изменяющейся случайным образом, поэтому средняя по всем значениям θ (угол между вектором Е и осью диполя) ЭПР диполя составляет: S>0>=0,172 = 1,53 м2
Для эффективного применения ПП надо обеспечить отношение п/ш ≥ 30.. 80 дБ, тогда для обеспечения п/ш = 45 дБ необходимо обеспечить ЭПРпп: S>0п> = 600 м2. Необходимое для этого число диполей будет составлять Nд = S>0>>п> / S>0> = 600/1,53 = 392 дип/мин.
3.2 Расчет параметров средств создания помех уводящих по дальности
Принцип создания уводящей по дальности помехи:
а) сигнал подавляемой РЛС принимается, усиливается с минимальной задержкой и излучается, создавая для РЛС мощный сигнал подсвета;
б) большая мощность сигнала помехи приводит к уменьшению усиления приемника РЛС вследствие действия АРУ, при этом происходит подавление в приемнике РЛС истинного (отраженного) сигнала от цели и захват стробом дальности сигнала помехи;
в) временное положение сигнала помехи формируется с последовательно возрастающей задержкой или опережением от импульса к импульсу относительно истинного сигнала цели до положения, соответствующего нескольким длительностям строба дальности РЛС. Закон увода может иметь различные формы, но если одновременно реализуется уводящая по скорости помеха, то производная по времени функция закона формирования уводящей по дальности помехи должна соответствовать функции закона формирования уводящей по скорости помехи во все соответствующие моменты времени. Максимальное ускорение по дальности не должно превышать возможности системы сопровождения по дальности подавляемого радиолокатора;
г) после достижения требуемой величины увода строба дальности передатчик помех выключается или излучается мощный шумовой импульс на рабочей частоте РЛС для обеспечения в РЛС срыва сопровождения по дальности;
д) РЛС переходит в режим повторного поиска по дальности. Если это возможно, то истинная цель захватывается радиолокатором на сопровождение по дальности;
е) процесс излучения помехи при необходимости повторяется.
Необходимость в системе запоминания частоты сигналов обусловлена тем, что при создании уводящих помех по дальности импульсным РЛС длительность создания помехи на частоте РЛС превосходит длительность зондирующего импульса РЛС, поступающего на вход системы РЭП, и излучение помехи происходит в основном тогда, когда на входе системы РЭII сигнал РЛС отсутствует. Запоминающие устройства также используются для обеспечения высокого уровня развязки между приемом и передачей, давая возможность передавать запомненный сигнал так, чтобы передача и прием никогда не совпадали во времени.
В системах РЭП используются различные типы запоминающих устройств: рециркуляторы радиоимпульсов; потенциалоскопы, работающие на ПЧ; настраиваемые по частоте генераторы гармонических колебаний или источники шума; линии задержки; запоминающие устройства рециркуляторного типа и взаимодействующие пространственно-разнесенные ретрансляторы, в работе которых используется задержка при распространении в окружающем пространстве. При реализации увода строба дальности сигнал помехи излучается в моменты времени после приема радиолокационного импульса, длительность которого может составлять доли микросекунды, поэтому в станции помех необходимо устройство для запоминания частоты этого импульса на довольно длительный период, обеспечивающий требуемое рассогласование строба дальности РЛС с отраженным от цели сигналом. Один из методов запоминания частоты в этом случае основан на использовании рециркулятора импульсов, обеспечивающего высокое быстродействие при обработке сигналов от импульса к импульсу, широкую мгновенную полосу и высокую пропускную способность. На рис. 7 представлена схема передатчика уводящих помех по дальности с рециркулятором с автоподстройкой фазы.
Рис. 7 - Структурная схема передатчика уводящих помех по дальности с рециркулятором с автоподстройкой фазы
Входной радиоимпульс усиливается в усилителе №1 и через коммутатор поступает на рециркулятор, который формирует расширенный по длительности радиоимпульс, состоящий из состыкованных выборок входного радиоимпульса. Из этого радиоимпульса в оконечном СВЧ-импульсном усилителе №З формируется уводящий по дальности помеховый радиоимпульс. Синхронизация передатчика помех осуществляется от продетектированного входного радиоимпульса логическим устройством, формирующим видеоимпульсы, управляющие работой коммутатора, и видеоимпульс с программируемой задержкой. Рециркулятор работает следующим образом. Входной радиоимпульс поступает на усилитель №2 и на один вход фазового детектора, а задержанный сигнал - на другой вход фазового детектора. В результате амплитуды сигналов на выходах фазового детектора функционально зависят от фаз между входным и задержанным сигналом. Выход ЛЭ соединяется с фазовращателем, который осуществляет сдвиг фазы задержанного сигнала на 0, 90, 180 и 270° с распределением сигналов на входы четырехпозиционного переключателя. Этот переключатель управляется логическим устройством, которое управляется постоянными напряжениями, пропорциональными входным амплитудам фазового детектора. При этом переключатель устанавливается в положение, обеспечивающее подстройку набега фазы в рециркуляторе, чтобы указанное фазовое рассогласование было не более 45°. Входные напряжения детекторов фазового детектора образуют в зависимости от разности фаз входного и незадержанного сигналов определенную комбинацию. Логическая схема согласно комбинации напряжений устанавливается в нужное положение.
На точность запоминания фазы и частоты оказывают влияние также положение и длительность передаваемого импульса уводящей по дальности помехи по отношению к моменту поступления и длительности входного импульса соответственно. Если нормированная длительность входного радиоимпульса рециркулятора равна длительности радиолокационного радиоимпульса, и задержка переднего фронта излучаемого импульса помехи в цикле увода кратна целому числу длительностей входного импульса, то воспроизведение спектра сигнала РЛС помехой будет достаточно точным. При всех других значениях длительности излучаемого импульса и временной задержки его переднего фронта в процессе увода искажения спектра усилятся. В свою очередь, в передатчике помех воздействие неблагоприятных эффектов из-за расширения спектра сигнала помехи может быть снижено в результате преднамеренного циклического изменения набега фазы в рециркуляторе, так чтобы уменьшение амплитуды спектральных составляющих помехи не было сосредоточено на дискретных частотах. При этом энергетические потери сигнала помехи в приемнике РЛС будут предсказуемы и будут более приемлемые величины средних потерь на всех частотах рабочего диапазона[6, стр.162].
4. Расчет параметров средств помехозащиты
4.1 Средства защиты от пассивных помех
Подавление пассивных помех может быть реализовано путем режекции в спектре принимаемого сигнала составляющих, кратных частоте повторения зондирующего сигнала. Для этого используются режекторные гребенчатые фильтры, реализуемые в виде алгоритмов или устройств череспериодной компенсации (ЧПК).
Структура простейшего однозвенного фильтра ЧПК приведена на рис.8
Его АЧХ описывается выражением
К(f)=2sin(fT>П>).
Считается, что подавление помех является эффективным если они подавлены до уровня шумов т.е. в нашем случае при k>ПП>45,28 дБ. Для удовлетворения этого требования используют фильтры ЧПК n-ого порядка с АЧХ
К(f)=2nsin(fT>П>)n.
Обычно относительная ширина спектра флюктуаций помехи Δf.Тп = 0,02..0,25. На рис. 8 показано как будет изменяться зависимость Кпп(Δf.Тп) при различных порядках фильтра:
Рис. 8
Примем Δf.Тп = 0,1
Зависимость коэффициента подавления пассивной помехи от порядка фильтра
|
Порядок фильтра |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Кпп, дБ |
14,6 |
26,25 |
35,81 |
42,24 |
44,63 |
45,15 |
45,25 |
45,27 |
45,28 |
Рис. 9
По графику зависимости коэффициента подавления пассивной помехи от порядка фильтра рис. 9 определяем требуемый порядок фильтра n = 4 при котором k>ПП>42,24 дБ, при условии что оставшиеся 3,04 дБ подавятся в накопителе при когерентном накоплении.
Используя пакет программ «Стрела 2.0» определим коэффициенты фильтра и его спектральные характеристики. На рис. 10 представлены основные параметры фильтра и входного процесса.
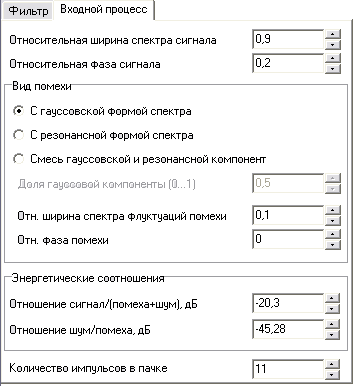
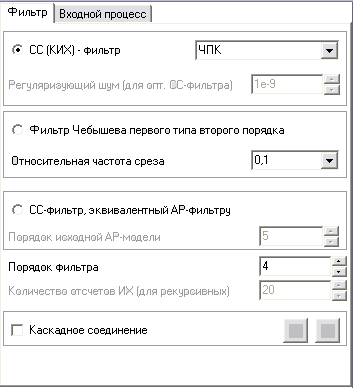
Рис. 10 - Параметры фильтра и входного процесса
На рис. 11 представлены результаты расчета фильтра.
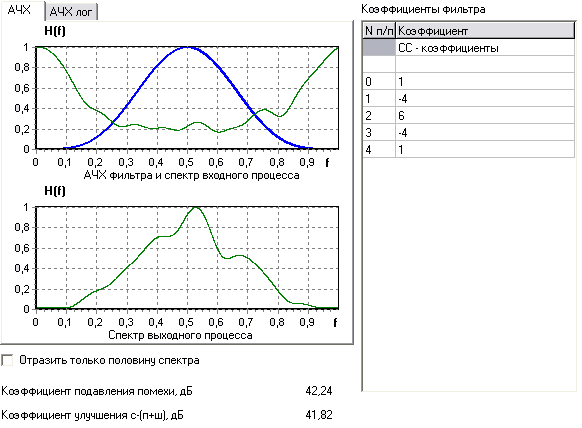
Рис. 11
Основным недостатком такого ЧПК является наличие «слепых» скоростей, то есть ситуации, когда сигналы, отраженные от движущихся целей, попадают в полосы режекции.
Обычные РГФ с алгоритмами ЧПВ (ЧПК) не позволяют выделить на фоне пассивных помех сигналы, отраженные от малоскоростных целей и особенно от целей, движущихся в тангенциальном относительно радиолокатора направлении, так как при небольших доплеровских сдвигах частоты спектральные составляющие этих сигналов попадают в области режекции АЧХ РГФ. Основным способом селекции полезного сигнала в рассматриваемом случае является увеличение времени запоминания в устройствах вычитания до значения, при котором заметно проявляется движение цели. Чаще всего время запоминания выбирают равным периоду сканирования луча антенны (периоду обзора или так называемому времени кадра). Соответствующие устройства носят название устройств кадрового вычитания достоинством их является чувствительность к движению целей со слепыми скоростями, т.е. свойство обнаруживать цели, движущиеся с тангенциальными скоростями. Однако меньший коэффициент кадровой корреляции по сравнению с междупериодным приводит к уменьшению коэффициента подавления таких устройств. Поэтому кадровые устройства используют как вторую ступень вычитания совместно с одним из устройств ЧПК (ЧПВ)[1, стр.176].
При использовании обычных РГФ с алгоритмами ЧПК для получения коэффициента подавления k>ПП >= 39.2 дБ понадобиться всего лишь 4 импульса из пачки а оставшиеся 7 импульсов используются в когерентном накопителе.
Можно заметить, что при использовании когерентного накоплении коэффициент подавления помехи увеличится в 7 раз.
На рис 12, 13 изображены результаты исследования многоканального фильтра с алгоритмом накопления – БПФ, тип окна – прямоугольное.
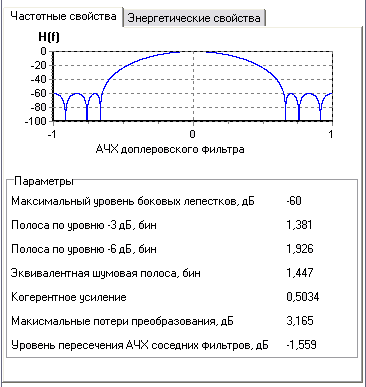
Рис. 12
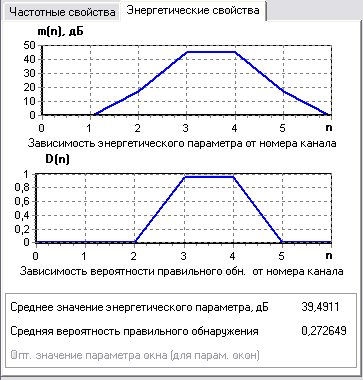
Рис. 13
4.2 Защита от уводящих по дальности помех
Основным способом защиты РЛС от уводящих помех по дальности является использование пороговых алгоритмов, вычисляющих рассогласование характеристик движения целей, определяемых на основе оценок скорости цели. Обнаружение рассогласования позволяет своевременно производить сброс сопровождения УП и автоматический перезахват сигнала реальной цели. Такой критерий носит название - дальностный пороговый:
По ИКО РЛС можно оценить скорость цели и на основе этой оценки сделать вывод о наличии УП по дальности или отсутствии ее.
Менее эффективным способом защиты от УП является введение в РЛС режима сопровождения слабого сигнала, при котором при воздействии ответной помехи (первый этап в постановке УП) продолжается сопровождение менее мощного сигнала от цели.
5. Анализ эффективности применения комплекса помех и средств помехозащиты
При воздействии только пассивных помех с рассчитанными в пункте 4.1 параметрами отношение сигнал/помеха на входе РЛС равно
q>П> = Е / Nд0,172 = 5,6 / 3921.53 = 0,01.
За счет применения фильтра ЧПК q>П> увеличится приблизительно на 40 дБ (в 100 раз) и составит q>ПП>’=1. Вероятность правильного обнаружения
 =
= =0,316.
=0,316.
Применение уводящих по дальности помех с высокой вероятностью будет приводить к захвату ложной цели.
При воздействии пассивной помехи вероятность пропуска цели составит
D = 1-D>1> = 1-0,316 = 0,684,
а также будет осуществляться перенацеливание на ложный объект.
На рис. 14 представлен результат действия пассивных помех, а именно приведен график зависимости максимальной дальности обнаружения РЛС от ЭПР пассивной помехи, если на РЛС нет устройства подавления ПП (нет режекторных гребенчатых фильтров).
Рис. 14
На рис. 15 приведен график зависимости максимальной дальности обнаружения РЛС от ЭПР пассивной помехи при использовании РФ. Сравнив зависимости на рис. 14 и рис. 15 можно увидеть корректирующее действие РФ, т.е. увеличение дальности обнаружения при использовании РФ.
Рис. 15
6. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
антенна пассивный помеха параметр
Анализ структурных схем и алгоритмов работы постановщиков помех позволяет сделать вывод о необходимости использования при проектировании таких систем достаточно сложных в изготовлении и настройке элементов и функциональных устройств. К их числу можно отнести устройства мгновенного измерения частоты; высокостабильные генераторы с электронным управлением, используемые как возбудители передатчиков помех и обеспечивающие перестройку по частоте за очень короткие интервалы времени (порядка наносекунд); широкополосные высокочастотные компоненты: ЛБВ и ЛОВ, малошумящие усилители СВЧ, ВЧ-фильтры, быстродействующие переключатели; цифровую высокочастотную память, необходимую для хранения ЗС РЛС и их воспроизведения при постановке УП; сверхбольшие интегральные схемы (СБИС) для организации управления отдельными узлами и системами помехопостановщика. В связи с возможностью размещения постановщиков помех на подвижном носителе (обычно ЛА), перечисленные компоненты должны удовлетворять следующим противоречивым требованиям: иметь минимальные энергопотребление, массу и габариты, хорошую электромагнитную совместимость (ЭМС), сохранять работоспособность при воздействии вибрации и резких изменениях микроклиматических параметров, обладать высокой надежностью.
Основное требование к программным ресурсам конфликтующих сторон – высокая производительность и темп обработки.
Определим темп для обработки данных в реальном масштабе времени:
Число каналов по дальности m1 = Tп/τи = 1820.10-6 /8.10-7 = 2275
Число каналов по азимуту m2 = ΔΩ/θ>0> = 60/1 = 60
Общее количество каналов M = m1. m2 = 136500
Тогда темп обработки данных составит 170 ГГц.
Быстродействие АЦП определяется затратами времени на преобразование, которые должны быть меньше длительности временного дискрета. В настоящее время используются АЦП с быстродействием, характеризующимся частотой дискретизации <100 МГц, например, АЦП АD 6644 фирмы Analog Device (США) имеет 65 МГц при 14 разрядах кода, динамическом диапазоне 73 дБ и частоте входного сигнала 39 МГц. Если быстродействия АЦП недостаточно для преобразования сигналов промежуточной частоты, то переходят к ЦОДЦ и ЦРГФ в виде комплексных фильтров с двумя квадратурными каналами, в которые включены два АЦП.
7. Выбор и технико-экономическое обоснование технологической базы для реализации проекта
Аппаратура обработки аналоговой и цифровой информации на ПАП и РЛС может быть реализована по следующим альтернативным концепциям.
1). Использование дискретных аналоговых элементов и цифровых и аналоговых микросхем со средней степенью интеграции. Достоинствами указанной элементной базы являются низкая стоимость, защищенность (при использовании металлических корпусов элементов) от воздействия электромагнитных излучений высокой мощности. Недостатком является высокое энергопотребление и большие массогабаритные параметры.
2). Использование программируемых логических (ПЛИС) и аналоговых (ПАИС) интегральных схем. Достоинствами данной элементной базы являются низкое энергопотребление и высокая компактность, а также возможность изменения рабочих алгоритмов при смене обстановки или выполняемой задачи. К недостаткам относится низкая устойчивость к воздействию мощных излучений.
В связи с развитием рынков ПЛИС (фирмы «Xilinx», «Atmel», «Altera», «Vantis», «Luccent») и ПАИС ( фирма «Anadigm» ), ростом плотности упаковки элементов на кристалле, снижением цен на программируемые интегральные схемы, а также возможности их программирования с защитой от считывания, вариант применения ПЛИС и ПАИС для построения устройств обработки (с обеспечением защиты от электромагнитных полей путем экранировки) представляется наиболее перспективным.
8. Составление структурной схемы устройства и описание ее работы
Структурная схема постановщика помех
На постановщике помех размещается передатчик уводящих помех, а также упаковки дипольных отражателей и устройство сброса. Управление работой средствами помехопостановки осуществляется с рабочего места оператора самолета-ПАП. Оператор исходя из сложившейся воздушной обстановки или указания с командного пункта включает одно или несколько средств создания помех.
Структурная схема устройства защиты РЛС от помех
Комплекс средств помехозащиты включает систему режекторных фильтров компенсации пассивных помех c с когерентным интегрированием остатков вычитания.
При когерентном накопленни остатков вычитания в ЦОДЦ (см. рис. 16) помехи в квадратурных каналах подавляются ЦРГФ(4-го порядка), содержащим общие для квадратурных каналов запоминающее (ЗУ) и арифметическое (АУ) устройства в каждом канале. После ввода компенсирующих поправок блоком БВП сигналы интегрируются цифровым полосовым гребенчатым фильтром 7-го порядка(ЦПГФ), реализованным на процессоре и содержащим ЗУ для двух квадратурных каналов и АУ для каждого канала. Квадратирующие устройства обеспечивают на выходе сумматора квадрат амплитуды сигнала движущейся цели, а цифроаналоговый преобразователь (ЦАП) преобразует цифровой код сигнала в импульс цели, который затем направляется на обнаружитель и индикатор.
Рис. 16 - Структурная схема цифрового ОДЦ с когерентным интегрированием остатков вычитания
Заключение
В результате выполнения курсовой работы был произведен расчет параметров РЛС, при которых обеспечиваются требования ТЗ, а также расчет параметров средств помехозащиты (алгоритма помехозащиты структуры и параметров), составлены структурные схемы постановщика помех и РЛС т.е. все задачи курсового проекта выполнены.
Список использованных источников
Бакулев П.А. Радиолокационные системы: Учебник для вузов. – М.: Радиотехника, 2004, 320 с.
Финкельштейн М.И. Основы радиолокации: Учебник для вузов. – 2-е изд., перераб. и доп. – М.: Радио и связь, 1983. – 536 с.
Основы системного проектирования радиолокационных систем и устройств: Методические указания по курсовому проектированию по дисциплине «Основы теории радиотехнических систем»: Рязан. гос. радиотехн. акад.; Сост.: В.И. Кошелев, В.А. Федоров, Н.Д. Шестаков. Рязань, 1995, 60 с.
Радиолокационные устройства (теория и принципы построения) под ред. В.В. Григорина-Рябова: М., «Советское радио», 1970, стр. 680.
Бакулев П.А. Радиолокация движущихся целей: Учебник для вузов. – М.: «Сов. радио», 1964, 336 с.
Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием: М. «Радиотехника», 2003. - 416 с.