Проектирование устройства логического управления (разработка электронного автомата)
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ РФ
Пояснительная записка
по дисциплине: ”Элементы систем автоматики”
на тему: "Разработка устройства логического управления."
Содержание
Введение
1. Структурный синтез управляющего автомата
1.1 Построение направленного графа абстрактного автомата
1.2 Минимизация абстрактного автомата
1.3 Кодирование внутренних состояний и выбор типа памяти
1.4 Определение логических функций возбуждения памяти
1.5 Разработка схемы дискретного автомата
1.6 Моделирование автомата
1.7 Выбор элементной базы
2. Выбор аналоговых элементов
3. Разработка устройств сопряжения по входу
3.1 Согласование датчика с Функцией F>2>
3.2 Сопряжение внешних ТТЛ сигналов (b1 и b2) с входом В1, В2 автомата
3.3 Тактовый генератор
3.4 Устройство начального пуска
3.5 Разработка таймера
3.6 Устройство реализации функции F1
3.7 Устройство реализации функции F2
4. Разработка устройств сопряжения по выходу
4.1 Согласование электролампы с выходом автомата
4.2 Согласование светодиодов с выходом автомата
5. Устройство индикации мгновенного значения F2
Заключение
Список литературы
Введение
Современное промышленное производство является сложным комплексным процессом, который требует быстрого и многомерного контроля за всеми параметрами. Такой контроль был бы невозможен без применения современной электронной техники и автоматики вследствие того, что существуют многочисленные физические явления недоступные для простого визуального контроля. В настоящее время промышленная автоматика развивается значительными темпами, что связано с постоянно повышающимся уровнем сложности и качества технологических процессов. Электронные промышленные устройства являются сложными системами, в состав которых входят энергетические преобразователи, элементы электропривода, микропроцессорные узлы обработки информации и связи с внешними управляющими объектами, а также датчики различного назначения, устройства согласования с объектом управления. Очевидно, что задача разработки промышленного автомата включает в себя комплекс проблем, которые сами по себе представляют отдельную область современной электроники. Важно обеспечить высокую надежность и защиту от сбоев, поскольку существуют технологические процессы, нарушение которых может привести к катастрофическим последствиям опасным для жизни людей и окружающей среды. Поэтому создание таких устройств требует от разработчика хороших знаний в области электроники, и в области технологических процессов для управления которыми создается промышленный автомат.
Целью данного курсового проекта является разработка электронного автомата при заданных входных сигналах и контролируемых параметрах, а также исполнительных устройствах. Функционирование автомата производится по приведенному в задании алгоритму.
1. Структурный синтез управляющего автомата
1.1 Построение направленного графа абстрактного автомата
При проектировании устройства логического управления будем ориентироваться на синхронный дискретный автомат Мура, поскольку для асинхронного дискретного автомата опасен эффект состязания ("гонок"). Для исключения эффекта "гонок" нужно применять соседнее кодирование логических переменных всех состояний автомата, чтобы переход в следующее состояние отличался от предыдущего только одним разрядом. Кроме того, для автомата Мура таблица выходов вырождается в одну строку, в отличие от автомата Мили. При построении автомата Мура операторные вершины граф-схемы ставятся в соответствие состояниям автомата. Переход в новое состояние осуществляется в зависимости от содержания условной вершины, следующей за операторной.
Построение направленного графа автомата Мура:
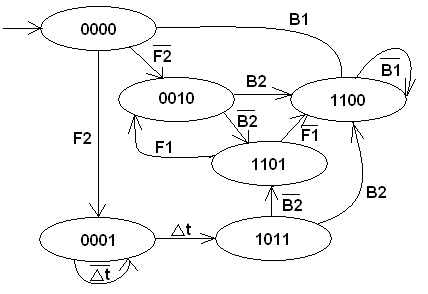
Рис.1 Направленный граф автомата Мура.
Направленный граф автомата построен, исходя из заданного алгоритма, и имеет шесть состояний, соответствующих операторным вершинам исходного алгоритма.
Здесь использованы следующие логические условия и сигналы:
B1=
 ;
B2=
;
B2=
 ;
;
При построении графа использованы следующие логические условия и сигналы:


Сигналы:
b
- сигнал контактного датчика (b=0
- логический ноль, b=1 -
логическая единица);
 временная
задержка,
временная
задержка,
 .
.
1.2 Минимизация абстрактного автомата
Для сокращения объема памяти минимизируем автомат. При рассмотрении задания видно, что автомат имеет шесть различных состояний. Таким образом нам необходимо три триггера, которые могут закодировать 8 различных состояний. Оставшиеся 2 состояния - называются нештатными, попадание в которые возможно при наличии какой-либо помехи. Упростим направленный граф.
|
Q3 |
Q2 |
Q1 |
Q0 |
q2 |
q1 |
q0 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
1 |
0 |
0 |
1 |
|
0 |
0 |
1 |
0 |
0 |
1 |
0 |
|
1 |
0 |
1 |
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
0 |
1 |
0 |
0 |
|
1 |
1 |
0 |
1 |
1 |
0 |
1 |
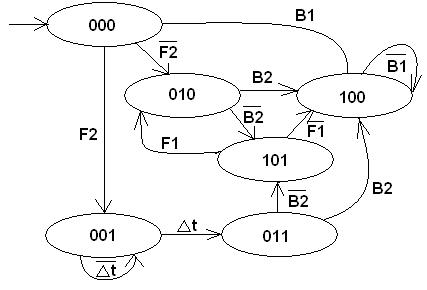
Рис.2 Упрощенный направленный граф автомата Мура.
1.3 Кодирование внутренних состояний и выбор типа памяти
Поскольку автомат имеет шесть внутренних состояний, потребуется использовать трехразрядный код и соответственно три ячейки памяти. Это следует из формулы:
n= [целая часть (log>2>N)] +1,
где N - число внутренних состояний автомата; n - количество ячеек памяти.
В качестве элементов памяти применяются динамические D - триггеры, таким образом, автомат будет синхронным. Отказ от разработки асинхронного автомата связан со сложностью кодирования состояний асинхронного автомата с учетом эффекта "гонок". В связи с этим надежность асинхронного автомата при воздействии внешних возмущений, которые присутствуют в промышленных условиях, будет невысокой. Например, наличие импульсных помех в сигнальных цепях внешних датчиков и каналов связи может привести к ложным переключениям логических элементов, если не использовать дополнительных мер по защите от помех. При этом синхронный автомат более устойчив к импульсным помехам, так как входной сигнал D - триггера должен быть зафиксирован заранее, до прихода тактового перепада, на время не меньшее чем защитный интервал.
1.4 Определение логических функций возбуждения памяти
Определим функции возбуждения памяти. При составлении функций возбуждения памяти учитываются только те переходы, включая петли, при которых в соответствующем разряде логический "0" меняется на "1" или "1" сохраняется.
__ __ ___ __ ___ __ __ ___ __ __ __ __ ___
D2=g2g1g0B2+g2g1g0B2 +g2g1g0F1 +g2g1g0B2+g2g1g0B2+g2g1g0B1;
__ __ __ __ __ ___ __
D1=g2g1g0∆t +g2g1g0F2+g2g1g0F1;
__ __ __ __ __ ___ __ __ __ ___ __ __ ___
D0=g2g1g0 F2+g2g1g0∆t+g2g1g0∆t +g2g1g0B2+g2g1g0B2.
Упростив выражения, применяя алгебру логики, получим:
__ __ ___ __ __ __ __ ___
D2=g2g1g0 1 +g2g1g0F1 +g2g1g0 1 +g2g1g0B1;
__ __ __ __ __ ___ __
D1=g2g1g0∆t +g2g1g0F2+g2g1g0F1;
__ __ __ __ __ __ ___ __ __ ___
D0=g2g1g0 F2+g2g1g0 1 +g2g1g0B2+g2g1g0B2.
Теоретически возможны дальнейшие преобразования приведенных выражений и их минимизация в ещё большей степени, но в данном случае минимизация производилась с учетом использования мультиплексоров при реализации автомата с целью снизить количество корпусов микросхем.
Таким образом, число элементарных логических элементов в схеме автомата будет сведено к минимуму.
Составление таблицы переходов.
Составим таблицу переходов (таблица 1):
Таблица 1
|
№ п/п |
При переменных |
Переходы |
|
1 |
F2
|
000->001->001 |
|
2 |
F2 |
000->001->011->100 |
|
3 |
F2 |
000->001->011->100->100 |
|
4 |
F2 |
000->001->011->101->100 |
|
5 |
F2 |
000->001->011->101->100->100 |
|
6 |
F2 |
000->001->011->101->010->101->010 |
|
7 |
|
000->010->101->100 |
|
8 |
|
000->010->100->100 |
1.5 Разработка схемы дискретного автомата
Схема дискретного автомата выглядит следующим образом:
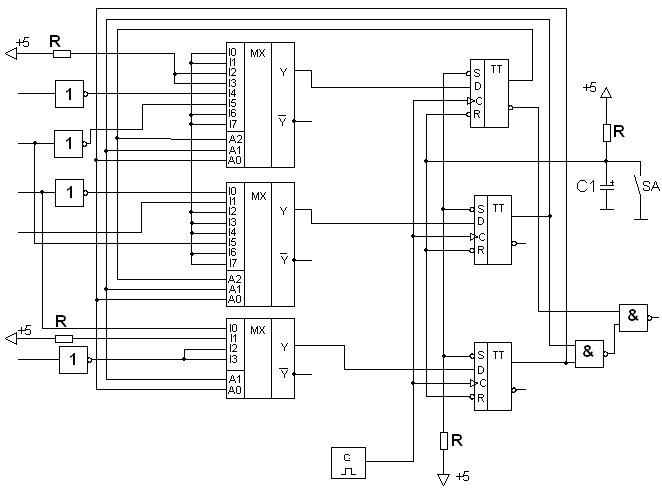
Рис.3 Схема управляющего автомата.
1.6 Моделирование автомата
Составление модели в OrCAD на основе полученных упрощенных выражений.

Рис.4 Схема управляющего автомата при моделировании.
Результаты моделирования схемы автомата.
Подставляя
на соответствующие входы значения
 проверяем правильность составления
модели:
проверяем правильность составления
модели:
1) F2



2) F2 B2B1
B2B1

3) F2B2

4) F2
 B1
B1

5) F2

6) F2
F1

7)
 B1
B1

8)
B2

1.7 Выбор элементной базы
С учётом промышленного назначения проектируемого автомата целесообразно использовать ТТЛ-логику (для простоты коммутации - так как часть входных сигналов задается уровнем ТТЛ (b1) при напряжении питания 12 В).
Для реализации автомата потребуются микросхемы: 2 8-входовых мультиплексора (74151А), 1 4-входовый мультиплексор, 3 D-триггера с дополнительными входами установки и сброса (7474), 4 элемента НЕ (7404), 2 элемента И-НЕ (7400). Также в состав автомата входят некоторые другие микросхемы, которые будут рассмотрены при разработке соответствующих функциональных блоков.
Выбираем следующие элементы:
3 D-триггера КР1533ТМ2 (2 триггера в одном корпусе)
4 логических элементов НЕ - КР1522ЛН1 (6 эл. в 1 корпусе)
2 логических элементов 2И-НЕ - КР1533ЛА3 (4 эл. в 1 корпусе)
2 8-входовых мультиплексора
1 4-входовый мультиплексор
2. Выбор аналоговых элементов
Светодиоды VD1,VD2-АЛ307БМ.
Общие сведения о данных светодиодов занесены в таблицу (таблица ):
-
Тип
светодиода
Цвет
Свечения
Сила света,
мкд, не более
Пост. пр.
напряжение
В, не более
Iпр,
мА
Iпрmax,
мА
АЛ307БМ
Красный
0.9
2,0
10
20
Светодиод VD3-АЛ119А.
Общие сведения:
Пост. пр. напряжение (Uпр) В, не более……3
Iпр, мА……………………………………...300
Электролампа (60 Вт, 127 В).
Датчик освещенности.
Датчик освещенности выбираем из условия, что измерения будут производиться в диапазоне 50…200лк.
Датчик [2] позволяет измерять действующее значение освещенности и в зависимости от этого формирует выходное напряжение. Внешний вид датчика приведен на рис.5.
Рис.5 Внешний вид датчика освещенности
В таблице ниже приводятся характеристики и параметры датчика освещенности
|
Характеристика |
Параметры |
|
Диапазон измеряемой освещенности |
От 10 люкс до 1500 люкс |
|
Выходное напряжение датчика |
От 0 В до 5 В |
|
Напряжение питания |
Постоянное 12 В ±10% |
|
Потребляемый ток |
Не более 12 мА |
Датчик устанавливается в разъём RJ-11. Внешний вид разъёма приведен на Рис.6.

Рис.6. Внешний вид разъёма RJ-11
Назначение контактов разъема RJ-11 представлено в таблице ниже.
-
Контакт
Рекомендуемая цветовая маркировка
Назначение
1
Оранжевый
Питание +12 B
2
-
-
3
синий и бело-синий
Выход
4
бело-оранжевый
"Общий"
3. Разработка устройств сопряжения по входу
3.1 Согласование датчика с Функцией F>2>
Нормализация шкалы датчика. Для нормализации шкалы датчика надо сместить ноль и расширить шкалу до 10В. Для смещения используем схему вычитателя. Диапазон измерения датчика 1490лк, предполагая шкалу линейной найдем значение 50 лк в Вольтах по этой шкале.
U>см>=
По графику зависимости выходного напряжения от освещенности напряжению 1В будет соответствовать 200 лк. Отсюда получаем значение коэффициента усиления K=10/1=10. Выбираем схему вычитателя.
U>вых>=A (U>1> - U>2>)
Выбираем R12=R13=10кОм, тогда R10=R11=R12/A=10/10=1 кОм.
Выбираем резисторы из ряда E192 10 кОм и 1 кОм.
Рис.7. Схема нормализации сигнала датчика.
3.2 Сопряжение внешних ТТЛ сигналов (b1 и b2) с входом В1, В2 автомата
По заданию
В1= ,
В2=
,
В2= ,
где
,
где
 логический сигнал (ТТЛ).
логический сигнал (ТТЛ).
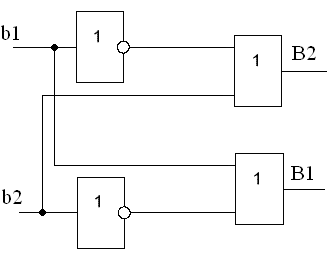
Рис.8 Схема реализации сигнала B1 и B2.
3.3 Тактовый генератор
В качестве тактового генератора будем использовать микросхему КР531ГГ1. Данная микросхема удобна тем, что на выходе мы получаем стандартный сигнал ТТЛ логики и простотой управления частотой. Микросхема представляет собой два независимых генератора, частота которых определяется напряжением. Каждый генератор имеет два входа для управления частотой: U - управление частотой, DU - управление диапазоном частоты. Если на вход U подан высокий уровень, а на DU низкий, то для фиксации частоты следует подсоединить между входами С>вн> внешний элемент - конденсатор или кварцевый резонатор. На выходах мультивибраторов получается меандр с частотой
f>0>=0.0005/C>Т>
Приведенное выше выражение справедливо только для ТТЛ серии.
По входу ЕI входную последовательность можно запретить, если подать напряжение высокого уровня.
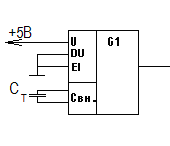
Рис.9 Схема подключения генератора.
Емкости, необходимая для нашей частоты (100 Гц) находится из уравнения: 100=0.0005/C>Т>. Отсюда С>Т>=0.0005/100=5 мкФ. Выбираем емкость К50-35-25В-5мкФ.
3.4 Устройство начального пуска
Устройство представляет собой RC - цепь, формирующую при включении низкий потенциал на входе сброса D - триггеров, для принудительного установления начального состояния. Схема устройства приведена ниже:
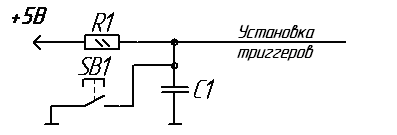
Рис.10 Устройство начального сброса.
Величины элементов выбираем следующие: R1=1 кОм, С1=1 мкФ. Резистор типа С2-29В-0.125-1кОм1%, конденсатор - К50-35-25В-1мкФ
3.5 Разработка таймера
На основе счетчиков довольно просто строить формирователи временных интервалов с длительностью, задаваемой внешним кодом. Такие формирователи находят широкое применение, например, в различных измерительных устройствах.
Через заданный
интервал времени после сигнала запуска,
который придет с автомата, высокий
уровень на выходе таймера сменится на
низкий. Так как через
нам необходимо получить “1” то подключим
к выходам таймеров инверторы. Тогда
через 3с сигналы
 примут истинные значения.
примут истинные значения.
Из блок-схемы (Рис.2) видно, что 3-секундный таймер должен запускается при выходном состоянии автомата "001".Т. к. таймер запускается отрицательным импульсом, то на вход элементов таймера подключим КЛУ.
Выходной импульс заданной длительности начинается сразу после входного сигнала, но длительность его может отличаться от заданной на какое-то время, меньшее периода тактового сигнала. Иногда это более приемлемое решение, особенно при больших длительностях выходного сигнала, значительно больших, чем период тактового сигнала. Схема формирователя временного интервала показана на рис.11.
Работа схемы начинается с подачи короткого отрицательного импульса -Старт. Он перебрасывает триггер, который разрешает работу счетчиков снятием сигнала параллельной записи -WR. По отрицательному фронту входного сигнала начинается положительный выходной сигнал заданной длительности. Счетчики начинают считать на уменьшение кода по положительным фронтам тактового сигнала с генератора. Когда они досчитают до нуля, вырабатывается сигнал переноса, перебрасывающий триггер в исходное состояние. Работа схемы возобновится после следующего сигнала - Старт.
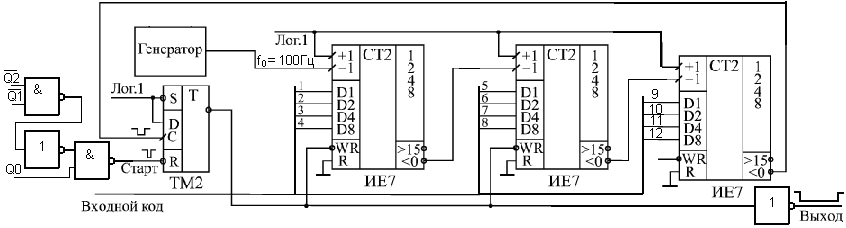
Рис.11. Формирователь временного интервала.
Если входной код равен 300, то длительность выходного сигнала составит от 300Т до 301Т, где Т - период тактового сигнала, в зависимости от момента прихода входного сигнала по отношению к тактовому сигналу. Абсолютная погрешность выдержки длительности выходного сигнала в любом случае не превышает периода тактового сигнала Т. Погрешность при Т=0.01с равна
3.6 Устройство реализации функции F1
Задание: F1=ФВЧ 1го порядка, f>гр>=2,5 кГц, К>у>=6дб, х>1>=-6Дб.
На рисунке 11а изображены амплитудо-частотные характеристики ФВЧ.
Передаточной функцией ФВЧ 1го порядка является передаточная функция апериодического звена 1го порядка. Рассчитаем ФВЧ с помощью передаточной функции звена 1го порядка.


Рис 11а.
Резистор и конденсатор выбираем из стандартного ряда Е48 или Е96 для обеспечения допустимого класса точности.
Для выполнения
условия
 ставим на выходе ФНЧ компаратор, который
сравнивает выходное напряжение ФНЧ и
опорное напряжение.
ставим на выходе ФНЧ компаратор, который
сравнивает выходное напряжение ФНЧ и
опорное напряжение.
Т. к. датчик освещённости приведенный потенциальный выход 0…10В, то опорное напряжение рассчитаем от уровня 10В.
Для сравнения сигнала с фильтра и сравнения его с заданным воспользуемся формулой: - 6дБ=20lg (U>вых>/U>вх>). Отсюда для сравнения будем брать величину
U>вых>= U>вх>*10-6/20=0,5 U>вх>.
Т.о. Uоп
=

Для получения Uоп используем источник тока REF200 с выходом 100мкА и резисторы R 50 кОм.
Схема реализации Uоп представлена на рис.
Схема реализации
функции
представлена на рис.
Используемые элементы С1 К50-35-25В-22нФ
R1 С2-23 0,125/0,25 1% 2,9кОм
Отсюда,
R2 С2-23 0,125/0,25 1% 2,9кОм
R3 С2-23 0,125/0,25 1% 2,9кОм
Компаратор К554СА2.
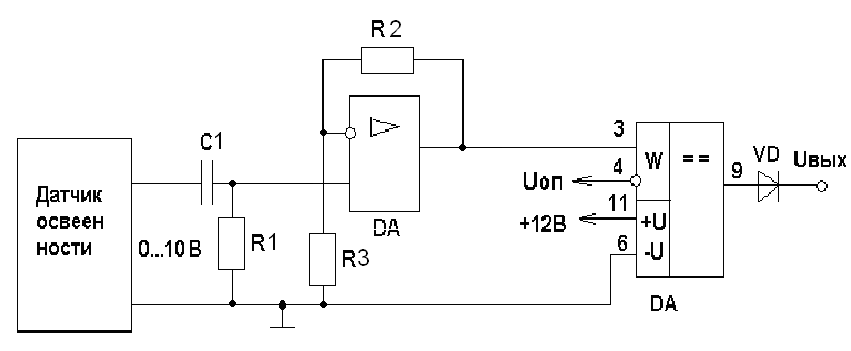
Рис 12.
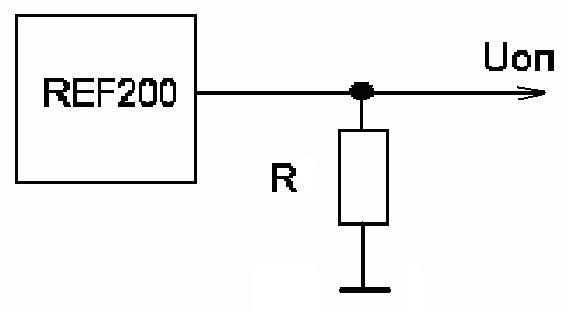
Рис 13.
Схема реализации функции F1 в программе OrCAD представлена на рис.
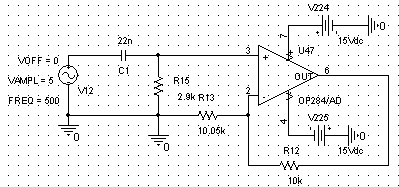
Рис 14.
Полученные графики представлены на рис 15.
При f=2500 Гц.
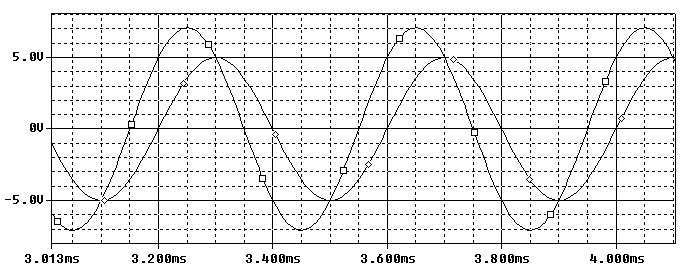
При f=10000 Гц.
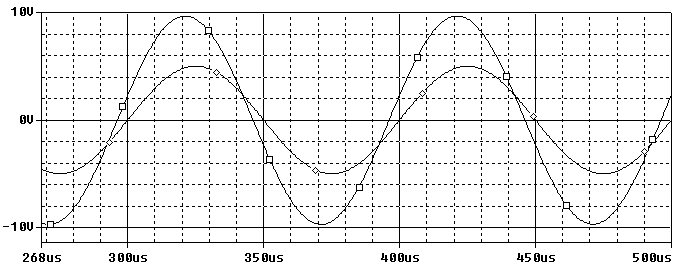
При f=500 Гц.
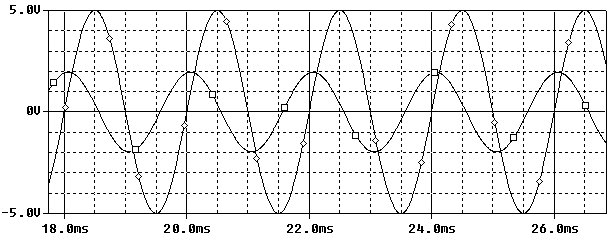
Рис 15. Графики зависимости U>вых> (t) и U>вх> (t)
3.7 Устройство реализации функции F2
Задание: F2=U>вых>=5lnU>H>-U>H>, Х2 = 5В.
Для реализации задания потребуется логарифматор и аналоговый вычитатель. Схема реализации функции F2>X2 представлена на рис16.
Логарифмический усилитель предназначен для получения выходного напряжения, которое пропорционально логарифму входного напряжения. Для этого можно использовать характеристику диода или транзистора. Я использовал характеристику транзистора. В этой схеме дифференциальный усилитель на транзисторах Т1 и Т2 служит для логарифмирования. Выходное напряжение логарифматора считается по следующей формуле:

при Ue, Uопорн > 0,Ut=0,02586 В.
Величина сопротивления R5 в это выражение не входит. Этот резистор выбирают таким образом, чтобы падение напряжения на нём не превышало выходного напряжения операционного усилителя. Конденсаторы С1 и С2 служат для дополнительной частотной коррекции. Компенсация температурной зависимости Ut выполняется с помощью резистора R4, имеющего положительный температурный коэффициент порядка 0,3% К.
Выбираем следующие значения сопротивлений и конденсаторов из ряда Е96:
R1 С2-23 0,125/0,25 1% 200 Ом, R2 С2-23 0,125/0,25 1% 2кОм
R3 С2-23 0,125/0,25 1% 4 кОм, R4 ТРП-27 22 Ом.
Аналоговый вычитатель напряжения рассчитываем по следующей формуле:

Выбираем следующие значения сопротивлений из ряда Е96:
R6,R7, R8,R9 С2-23 0,125/0,25 1% 2кОм,R5 С2-23 0,125/0,25 1% 200Ом
Компаратор К554СА2.
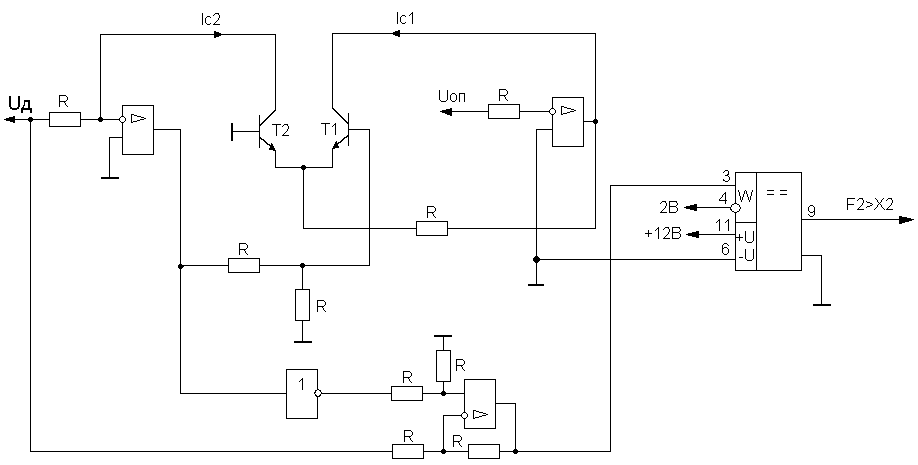
Рис 16.
Схема получения Uопорн представлена на рис17. Использую микросхему REF200, содержащую в одном корпусе 2 источника тока. Выбираем резистор R из ряда Е96 С2-23 0,125/0,25 1% 100кОм. При таком значении получаю значение Uоп = 10В. Для получения напряжения сравнения Uоп = 5В выбираем резистор R С2-23 0,125/0,25 1% 50кОм.
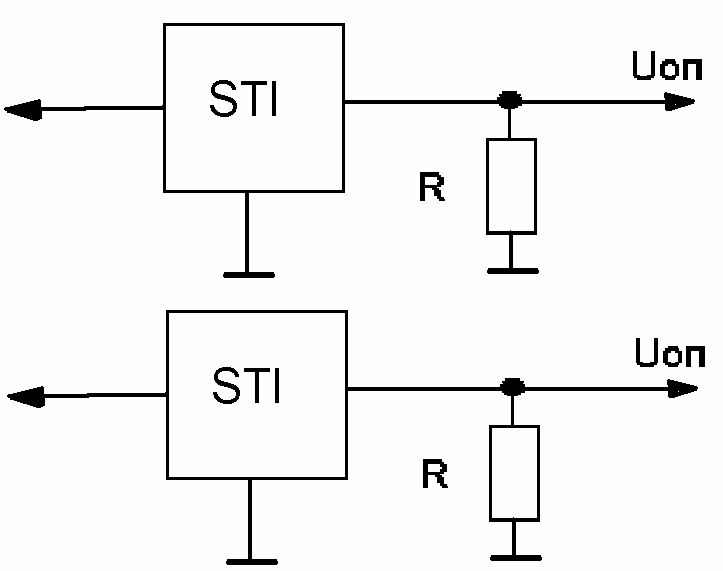
Рис 17.
Схема реализации функции F2 в программе OrCAD представлена на рис 18.
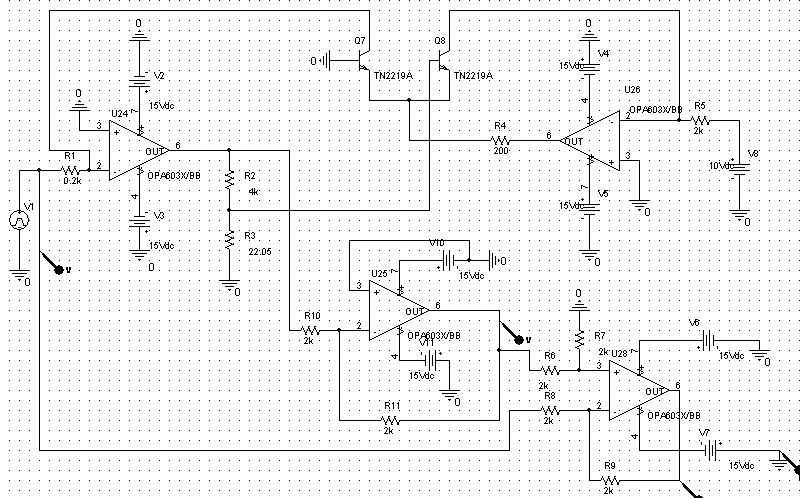
Рис 18.
Полученный график представлен на рис 19.
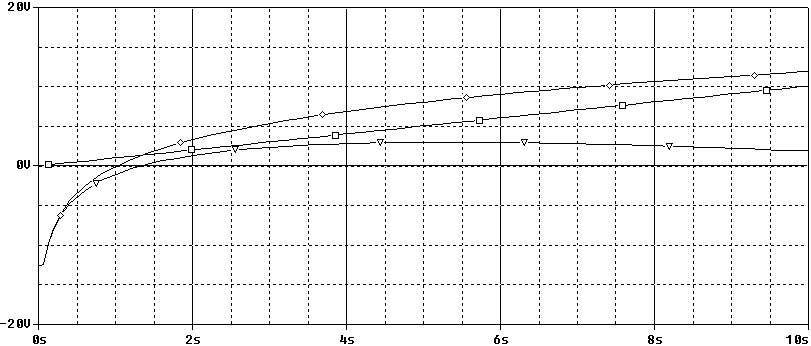
Рис 19. Графики зависимости U>вых> (t) и U>вх> (t)
4. Разработка устройств сопряжения по выходу
4.1 Согласование электролампы с выходом автомата
По заданию
требуется управлять электролампой с
параметрами
 В,
60Вт.
В,
60Вт.
Для сопряжения автомата с электролампой используем твёрдотельное реле DPA6119 со следующими параметрами:
Управление: постоянное напряжение 3,5…10В;
Коммутируемое переменное напряжение ~20…280В;
Максимальный ток нагрузки 1А;
Время вкл. и выкл.10мс.
Схема включения:
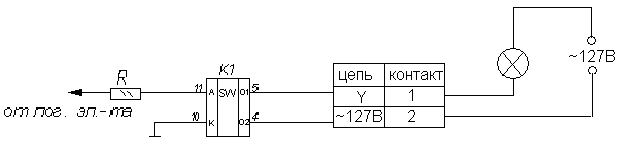
Рис.20 Схема включения твёрдотельного реле.
Резистор R1 предназначен для ограничения входного тока реле на уровне10 мА:
R1= (5-1,2) /0,01=380 Ом.
Ближайшее стандартное - 383 Ом из ряда Е48.
4.2 Согласование светодиодов с выходом автомата
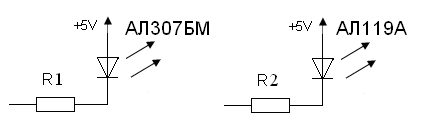
Рис.21 Индикация исполнительных устройств.
Используемые элементы:
Выбираем резистор R1 из ряда Е96 С2-23 0,125/0,25 1% 270Ом.
Светодиод АЛ307АМ, с параметрами U>ПР >= 2В, I>ПР >=10 мА.
Выбираем резистор R2 из ряда Е96 С2-23 0,125/0,25 1% 5,6Ом.
Светодиод АЛ119А, с параметрами U>ПР >= 3В, I>ПР >=300 мА.
5. Устройство индикации мгновенного значения F2
Для реализации устройства индикации индукции воспользуемся индикатором ИЖЦ 5-4/8. Индикатор имеет 4 разряда и работает в статическом режиме. Типовая схема включения преобразователя, его соединения с жидкокристаллическим индикатором и четырьмя элементами ИСКЛЮЧАЮЩЕЕ ИЛИ, необходимыми для управления десятичными запятыми индикатора, показана на рис.22. Жидкокристаллический индикатор полностью управляется АЦП типа К572ПВ5. Также воспользуемся делителем напряжения, и повторителем.
Выбираем сопротивления для делителя напряжения: R1 - С2-23 0,125/0,25 1% 10 кОм; R2 - С2-23 0,125/0,25 1% 10 кОм.
В преобразователе К572ПВ5 использован принцип двойного интегрирования, в соответствии с которым вначале разряженный интегрирующий конденсатор Синт заряжают определенное время током, пропорциональным измеряемому напряжению, а затем разряжают строго определенным током до нуля. Время, в течение которого происходит разрядка и разрядка конденсатора, будет пропорционально измеряемому напряжению. Это время измеряют с помощью счетчика импульсов; с его выхода сигналы подают на индикатор.
Пределы входного напряжения устройства зависят от образцового напряжения Uобр и определяются соотношением Uвх. max=±1,999 Uобр. Текущие показания индикатора должны выражаться числом, равным 1000 Uвх/Uобр, однако на практике они ниже на 0,1...0,2%. В основном используют частоту тактового генератора равную 200, 100, 67, 50, 40 КГц. Период измерений при тактовой частоте 50 кГц равен 320 мс. Иначе говоря, прибор производит 3 измерения в секунду.
Преобразователь оснащен двумя встроенными источниками питания, один напряжением 2,9±0,5 В, а второй - около 5 В. Плюс первого соединен с выв.1, а минус - с выв.32 (этот вывод принято считать общим проводом аналоговой части преобразователя). У второго источника плюс на том же выв.1, а минус - на выв.37. На выходе F преобразователь вырабатывает последовательность прямоугольных импульсов вида "меандр" с частотой, в 800 раз меньшей тактовой (62,5 Гц при fт = 50 кГц). На выходах, подключаемых к элементам цифр индикатора, напряжение имеет ту же амплитуду, форму и частоту, но оно синфазно с напряжением на выходе F для невидимых элементов и противофазно для видимых. Низкий уровень этих импульсов соответствует - 5 В (выв.37), а высокий - нулю (выв.1). Для управления четырьмя десятичными запятыми необходимы дополнительные четыре логических элемента ИСКЛЮЧАЮЩЕЕ ИЛИ (DD2). Они повторяют фазу "меандра" для неиндицируемых запятых и инвертируют ее для той, которая должна быть видна.
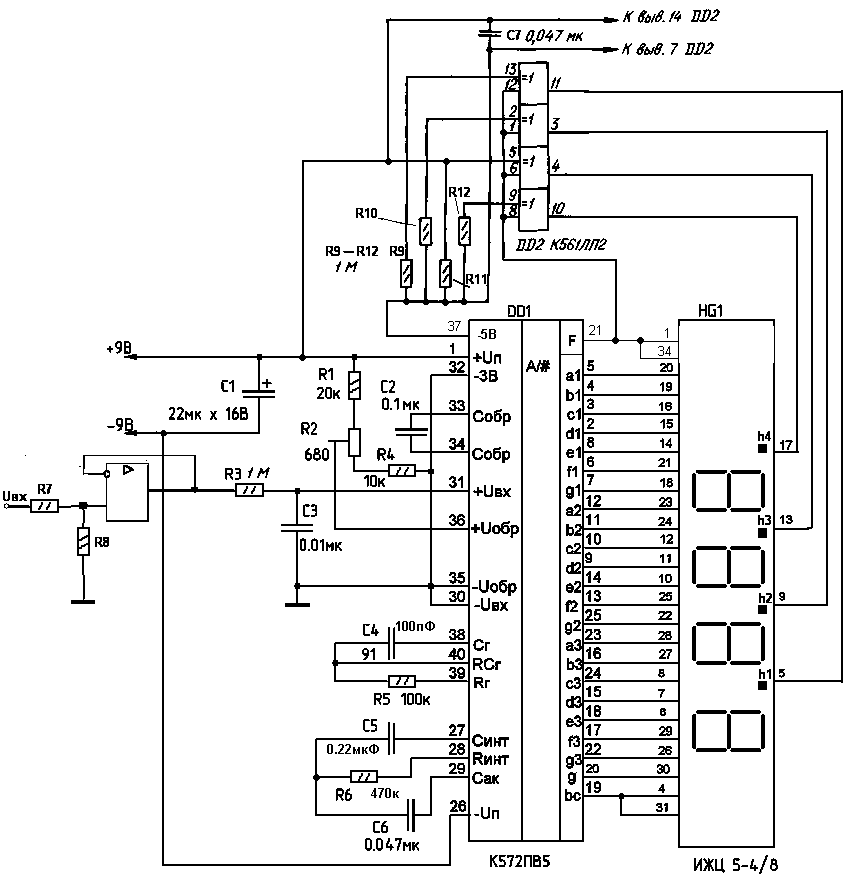
Рис.22 Схема включения АЦП и индикатора контролируемого параметра
Заключение
В результате выполнения курсовой работы был выполнен структурный синтез устройства логического управления, выбор элементной базы; синтез сопряжения по входу и выходу, таймера, тактового генератора и устройства индикации.
В курсовой работе контролируемой величиной является освещенность, измеряемая датчиком освещенности, который позволяет измерять действующее значение освещенности и в зависимости от этого формирует выходное напряжение. При этом требовалось нормирование контролируемой величины, приведение её к шкале 10В для согласования датчика с преобразователем аналоговых сигналов, реализующий функцию F>2>.
Дискретный автомат был реализован на базе мультиплексора, в качестве элементов памяти были применены динамические D - триггеры.
При выборе схем, реализующих заданные передаточные функции, вспомогательные функции и реализация коммутаций устройств со схемой автомата Мура, были выбраны: таймер, тактовый генератор, устройство начального пуска, устройство реализации функции F1 и F2, устройства опорного напряжения, устройства сопряжения, устройство индикации.
При разработке устройства индикации, в качестве преобразователя аналогового сигнала в цифровой использована микросхема КР572ПВ5, которая представляет собой преобразователь на 3,5 десятичных разрядов, работающий по принципу последовательного счета с двойным интегрированием, с автоматической коррекцией нуля и определением полярности входного сигнала. Адекватность работы дискретного автомата и преобразователей F>1> и F>2> была проверена с помощью моделирования в программном комплексе OrCAD 9.1. В результате выполнения курсовой работы были получены навыки разработки и моделирования цифровых и аналоговых устройств.
Список литературы
Гусев В.Г., Гусев Ю.М. Электроники и микропроцессорная техника. - М.: Высшая школа. 2005. - 790 с.
Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство. - М.: Мир. 1982. - 512 с.
Быстров Ю.А., Мироненко И.Г. Электронные цепи и схемотехника. - М.: Высшая школа. 2002. - 384 с.
Дубровский В.В., Иванов Д.М. Резисторы: Справочник. - М.: Радио и связь 1991. - 528 с.
Якубовский С.В., Ниссельсон Л.И., и др. Цифровые и аналоговые микросхемы: Справочник. - М.: Радио и связь. 19980. - 496 с.
Радио. №9, 1990.80с.
Техническая документация сайтов http://tomschools.ru, http://www.nightbird.ru/help.html