Многоканальная система передачи информации (работа 1)
Многоканальная система передачи информации
Содержание
Введение 3
1.Преобразователи частоты 5
1.1 Напряжение модулятора 5
1.2 Рабочее затухание модулятора 6
2. Многоканальная система передачи информации 8
3. Разработка СПИ 13
3.1 Предназначение и функциональная схема 13
3.2 Описание работы принципиальной схемы приемопередатчика 14
Заключение 19
Список использованной литературы 20
Введение
Актуальность темы. Появление новых информационных технологий приводит не только к тому, что человек начинает овладевать новыми колоссальными объемами информации, но и к тому, что новые информационные технологии коренным образом меняют социальный, культурный порядок развития.
Информационные технологии оказывают все возрастающее влияние на формирование личности, семьи, образа жизни, изменяют сферу образования и, в свою очередь, образование должно стать той структурой, в которой формируется сознание будущих поколений, живущих в информационном обществе.
Предметом исследования является коммуникационные технологии
Объектом исследования выступают многоканальные системы передачи информации по профилю электрической связи.
Основной целью данного проекта представляется выявление особенностей многоканальной системы передачи информации, её возможностей, недостатков, разработок.
Таким образом, можно выделить следующие задачи для работы над проектом:
Рассмотреть преобразование частот
Спроектировать и охарактеризовать модуляторы
Подвести итоги исследования
Научная новизна проекта заключается в том, что коммуникационные технологии развиваются достаточно очень быстро, но полным описанием таких систем очень мало, именно поэтому данная работа выступит в качестве нового проекта по многоканальным системам передачи информации.
В работе представлены чертежи, рисунки, схемы, которые наглядно демонстрируют преобразование в многоканальных системах информации.
В работе были использованы следующие виды литературы: теоретические источники, статьи, техническая литература, что говорит о том, что данная работа охватывает весь цикл технических возможностей данных систем, которые детально описываются в настоящем курсовом проекте.
Ефимчик М.К. Технические средства электронных систем: Учебное пособие. - М.: Тесей, 2006
Каяцкас А.А. Основы радиоэлектроники: Учеб. пособие для вузов. - М.: Высшая школа, 2003.
Манаев Е.И. Основы радиоэлектроники: Учеб. пособие для вузов. -М.: Радио и связь, 2005.
Головин О.В., Кубицкий А.А Электронные усилители. - М.: Радио и связь, 2008
Метрология и электроизмерения в телекоммуникационных системах: Учебник для вузов /А.С. Сигов, Ю.Д. Белик. и др./ Под ред. В.И. Нефедова. - 2-е изд., перераб. и доп. - М.: Высш. шк., 2008
Бакланов И.Г. Технологии измерений в современных телекоммуникациях. - М.: ЭКО-ТРЕНДЗ, 2007
1.Преобразователи частоты
1.1 Напряжение модулятора
Экспериментальное исследование основных параметров и характеристик схем модуляторов многоканальных систем передач.
1.1 Схема простейшего модулятора
В результате передачи сигнала от F к f получаем два вида сигнала: на входе и на выходе.
1.2 Диаграмма напряжения на входе
1.3 Диаграмма напряжения на выходе

На модулятор поданы частоты F = 8 кГц и f = 64 кГц, внутренне сопротивление генераторов сигнала и сопротивление нагрузки модуляторов приняты равным 600 Ом.
Таблица 1.1
Нагрузка модуляторов
-
f, кГц
Рвых, дБ
F = 8
-18,37
f = 64
-5,22
f + F = 72
-21,75
f – F = 56
-22,62
f – 2F = 48
-56,55
f + 2F = 80
-56,55
f – 3F = 40
-78,30
f + 3F = 88
-78.30
3f + F = 200
-33,05
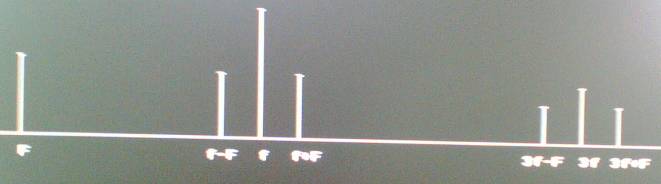
Рис 1.1
Спектральный состав тока на выходе модулятора
1.2 Рабочее затухание модулятора
Зная спектральный состав тока на выходе модулятора, а так же уровень модулирующего колебания P(F)= -3 дБ, найдем рабочее затухание модулятора.
αр = Р>вх> – Pвых = -3 – (-17,40)= 14,40 дБ
1.2 Схема балансного модулятора
1.4 Диаграмма напряжения на входе:
1.5 Диаграмма напряжения на выходе:
2. Многоканальная система передачи информации
В цифровой системе передачи информации (СПИ) передаваемый сигнал является последовательностью М-ичных символов.
Значение каждого символа передается при помощи радиоимпульса прямоугольной формы, используя один из методов модуляции, описанных в разд. 2.8. В процессе передачи сигнала по линии эти импульсы случайным образом искажаются (обычно это происходит из-за наличия мультипликативной помехи) и появляется аддитивная помеха.
Демодулятор к моменту окончания очередного принимаемого импульса должен указать (точнее, угадать), которое из М возможных значений символа было передано с данным импульсом. Очевидно, что иногда демодулятор будет выдавать ошибочные решения, поэтому желательно применять такой способ обработки импульса, который при заданных характеристиках сигналов и помех обеспечивает минимум полной вероятности ошибки Р. Это и есть главный критерий качества приема в цифровой СПИ.1
Чтобы следовать этому критерию, для обработки очередного импульса нужно использовать такой алгоритм, который учитывает все сведения об ожидаемом импульсе, которые известны к данному моменту (момент прихода и длительность, несущая частота и начальная фаза, характер искажений огибающей и закон паразитной внутриимпульсной фазовой модуляции и т.п.). Это и есть априорные сведения, и чем их больше, тем меньше будет вероятность ошибок, допускаемых демодулятором, который учитывает эти сведения.
Некоторые параметры ожидаемого импульса известны с высокой точностью. Например, в канале с постоянными параметрами принимаемый сигнал повторяет по форме передаваемый, поэтому известны длительность импульса и его амплитуда. Считается, что известны также текущие значения несущей частоты и частоты повторения импульсов, но здесь многое зависит от стабильности генераторов, задающих эти частоты в передатчике, и генераторов, воспроизводящих эти же колебания в приемнике. Фактически эти генераторы играют роль часов, по которым планируется график формирования (обработки) сигнала в передатчике (приемнике). Чем выше синхронность хода часов приемника по отношению к часам передатчика, тем выше качество приема.
Те устройства приемника, которые обеспечивают условия, при которых частота и даже текущая фаза генератора несущей в приемнике с достаточной точностью совпадают с соответствующими параметрами генератора в передатчике, называются системой обеспечения когерентности. Аналогично, система тактовой синхронизации формирует в приемнике тактовые импульсы, которые с достаточной точностью указывают момент времени, когда начинается очередной принимаемый импульс (следовательно, заканчивается предыдущий).2
Обеспечить качественную синхронизацию обычно бывает проще, нежели когерентность, поскольку несущая частота, как правило, существенно выше тактовой частоты. В связи с этим принято рассматривать три типа систем по степени их когерентности.
Когерентной называется СПИ, в которой ожидаемые значения начальных фаз всех принимаемых импульсов (вплоть до окончания сеанса связи) известны заранее, и эти сведения используются при демодуляции импульсов. Другими словами, генераторы несущей в передатчике и приемнике должны обладать столь высокой стабильностью, чтобы фазы выдаваемых колебаний не расходились заметно в течение сеанса связи. Когерентная СПИ - это идеал, который используется лишь для сравнения с другими СПИ, реализуемыми практически.
Частично-когерентной называется СПИ, в которой ожи-даемые значения начальных фаз всех принимаемых импуль-сов заранее неизвестны, но в процессе приема они оцениваются, и эти сведения используются при демодуляции импульсов. Другими словами, генератор несущей в приемнике при помощи устройства фазовой автоподстройки частоты (ФАПЧ) постоянно синхронизируется с генератором передатчика. Подстройка осуществляется по самому принимаемому сигналу. И в этом случае генераторы несущей должны обладать некоторой стабильностью частоты, достаточной, например, для того, чтобы в случае разрыва цепи ФАПЧ фазы выдаваемых колебаний не расходились заметно хотя бы в течение нескольких сотен импульсов, что вполне реализуемо. Поэтому именно частично-когерентную СПИ на практике обычно называют когерентной. 3
Некогерентной называется СПИ, в которой ожидаемые значения начальных фаз всех принимаемых импульсов неиз-вестны и не оцениваются в процессе приема (ФАПЧ не применяется). Прием очередного импульса рассматривается как прием сигнала со случайной начальной фазой, равномерно распределенной в интервале 0-2?. Для этого генераторы несущей в передатчике и приемнике должны обладать лишь такой стабильностью, чтобы фазы выдаваемых колебаний не расходились заметно хотя бы в течение одного импульса. Поэтому некогерентная СПИ оказывается проще и дешевле. 4
Очевидно, что когерентная СПИ, в принципе, может обеспечить меньшую вероятность ошибки, чем частично-когерентная и, в еще большей степени, некогерентная СПИ.
Подобным образом можно классифицировать цифровые СПИ как синхронные и асинхронные. В синхронной СПИ передача каждого символа (импульса) начинается в тактовый момент времени, при этом периодическая последовательность тактовых импульсов генерируется постоянно. Благодаря этому в приемнике имеется возможность осуществлять ФАПЧ местного генератора тактовых импульсов по принимаемому сигналу и предсказывать ожидаемые моменты прихода для большого количества ближайших символов.
В асинхронной СПИ передача первого символа кодовой комбинации начинается в произвольный момент времени, правда, остальные символы следуют за ним через равные интервалы известной величины. В связи с этим в начале каждой кодовой комбинации обязательно нужно передавать дополнительный, стартовый, импульс, которые запускает в приемнике ждущий генератор тактовых импульсов с той же частотой повторения. Таким способом предсказывается ожидаемое время прихода всех импульсов, но только для данной кодовой комбинации. 5
Другой фактор, определяющий уровень априорных сведений о сигнале, это мультипликативная помеха. При воздействии мультипликативной помехи в виде временных селективных замираний амплитуды и начальные фазы принимаемых импульсов достаточно медленно, но случайным образом изменяются во времени. Демодуляция превращается в прием импульсов известной формы, но со случайными амплитудой и начальной фазой, при этом, как правило, удается обеспечить частичную когерентность СПИ.
При воздействии мультипликативной помехи в виде частотных селективных замираний форма принимаемых импульсов становится случайной, но неизменной во времени и демодуляция превращается в прием импульсов неизвестной (случайной) формы. 6
При воздействии мультипликативной помехи общего вида форма принимаемых импульсов становится случайной и при этом медленно изменяется (флуктуирует) во времени, увеличивается межсимвольная интерференция. Оптимальный прием таких сигналов существенно усложняется, при этом заметно увеличивается вероятность ошибки.
Таким образом, при выборе способа демодуляции импульсов и при вычислении достигаемой при этом вероятности ошибки необходимо четко определить характер аддитивных и мультипликативных помех, воздействующих на сигнал.7
3. Разработка СПИ
Цель: разработка устройства передачи данных «Атлас - Ф»
3.1 Предназначение и функциональная схема
Устройство высокочастотного уплотнения «Атлас-Ф» предназначено для применения с системой передачи извещений «Фобос» и обеспечивает полудуплексный обмен информацией между ретрансляторами и ПЦН системы «Фобос» по занятой абонентской линии городской телефонной сети или между ретрансляторами и ПЦН двух систем «Фобос» по выделенной линии ГТС. Устройство не может применяться на уплотненных абонентских линиях, а также на линиях, на которых установлены абонентские счетчики.
Аппаратура состоит из двух одинаковых устройств уплотнения (УУ), одно из которых устанавливается на АТС и подключается низкочастотным входом/выходом («Р/ПЦН») к ретранслятору СПИ «Фобос», а высокочастотным («Линия») – к телефонной линии. Второе УУ устанавливается в пункте централизованной охраны и подключается высокочастотным входом/выходом к телефонной линии, а низкочастотным – к ПЦН.8
Каждое УУ представляет собой двухсторонний приемопередатчик логических сигналов, подаваемых раздельно во времени от ретранслятора или от ПЦН в абонентскую линию и далее – на второе УУ. УУ обеспечивает передачу информации в любую сторону со скоростью 200 бод, необходимую для нормального функционирования системы «Фобос».9 В обоих указанных вариантах возможно использование в качестве ПЦН как пульта (или двух пультов) оператора "Фобос", так и персональной ЭВМ.
Рис. 3.1 . Варианты использования устройства уплотнения "Атлас-Ф":
а) совместно с двумя СПИ "Фобос" по выделенной линии;
б) совместно с одной СПИ "Фобос" по занятой линии;
3.2 Описание работы принципиальной схемы приемопередатчика
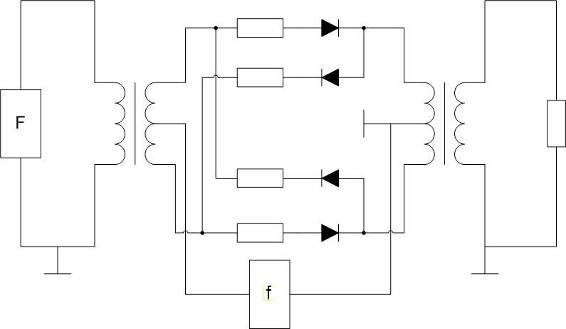
Два идентичных блока приемопередатчика (ПрП), один из которых установлен в контролируемом пункте (КП), а другой в диспетчерском пункте (ДП), служат для обмена сообщениями и командами между КП и ДП по трехпроводной (Л1, Л2, ЗЕМЛЯ) линии связи, которая образует два канала (Л1 – земля и Л2 – земля). Блоки ПрП обеспечивают одновременную встречную прердачу сигналов от КП к ДП и от ДП к КП по каждому из каналов.
ПрП состоит из:
передатчика и приемника сигналов канала Л1 – ЗЕМЛЯ на VD1, VD8, VD9, KV1;
передатчика и приемника сигналов канала Л2 – ЗЕМЛЯ на VD4…VD7, VD10, VD11, KV2;
схемы управления передатчика на DD1 и DD3;
схемы логической обработки принятых сигналов на DD2, DD4, DD5;
схемы управления индикаторами на DD5.3, DD5.4, DD4.2.
При одновременной передаче сигналов «1» от КП к ДП и от ДП к КП транзисторы МУС Л! КП и МУС Л! ДП закрыты, на клемму Л! КП и Л! ДП поданы одинаковые напряжения минус 24В, ток по Л! не течет, реле KV1 КП и KV1 ДП отпущены, их контакты разомкнуты.
При передаче сигнала «0» от КП к ДП и сигнала «1» от ДП к КП, МУС Л1 КП открыт, и ток течет по цепи: минус 24В ДП – KV1 ДП – линия Л1 – KV1 КП – переход К-Э МУС Л1 – корпус, при этом реле KV1 ДП и KV1 КП срабатывает и их контакты замыкаются.
При передаче сигнала «0» от ДП к КП и сигнала «1» от КП к ДП, МУС Л1 ДП открыт и ток течет по цепи: минус 60В – минус 24В КП точка А – реле KV1 КП – линия 1 – реле KV1 ДП – переход К-Э МУС Л1 ДП – корпус. При этом реле KV1 КП и KV1 ДП срабатывают и их контакты замыкаются.
При одновременной подаче сигналов «0» от КП к ДП и от ДП к КП транзисторы МУС Л1 КП и МУС Л1 ДП открыты, напряжение на клеммах Л1 КП и Л1 ДП отсутствует, ток по линии Л1 не течет, реле KV1 КП и KV1 ДП отпущены и их контакты разомкнуты.
. В дежурном режиме работы, с целью контроля за исправностью линии связи, в точку Б-КП подано напряжение минус 48В (транзисторы МУС Л2 и МУС 48 в КП закрыты), а в точку Б-ДП подано напряжение минус 24В. Транзисторы МУС Л2 и МУС ДОПОЛ. закрыты и по линии Л2 течет ток по цепи: минус 60В КП – минус 48В в точке В – реле KV2 КП – линия Л2 – реле KV2 ДП – минус 24В в точке Б-ДП – корпус. При этом по обмоткам реле KV2 КП и ДП течет ток и их контакты замкнуты. По каналу Л1 – ЗЕМЛЯ в дежурном режиме от КП передается сигнал «1», а от ДП – сигнал «0» (п. 3.3.). При коротком замыкании проводов Л1 и Л2 между собой, напряжение на клемме Л2 ДП уменьшается, ток через обмотку KV2 ДП прекращается, его контакты размыкаются, что воспринимается ДП как сигнал АВАРИЯ. При обрыве проводов Л1 и Л2 ток через обмотки реле KV2, KV2 прекращается, что также воспринимается ДП как сигнал АВАРИЯ.
Выходной транзистор МУС 48В во всех режимах, кроме дежурного, открыт, точка В соединена с корпусом и напряжение в точке Б не может превышать минус 24В. Контакт ЗАП-7А в схеме КП никуда не подключен и на нем установлен сигнал «1». Передатчики КП функционируют согласно табл. 3.1.
Таблица 3.1
|
Вход |
Выход |
||||||||
|
12А Л1, Л2 |
10А Л1, Л2 |
11А Х1 |
9А Л2 |
15А 1 |
Точка А 0В |
Сигнал, передав. по Л1 0 |
6А 1 |
Точка Б 0В |
Сигнал, передав. по Л1 0 |
|
0 |
Х |
Х |
Х |
1 |
0В |
0 |
1 |
0В |
0 |
|
1 |
0 |
Х |
Х |
0 |
24В |
1 |
0 |
24В |
1 |
|
1 |
1 |
1 |
0 |
1 |
0В |
0 |
1 |
24В |
1 |
|
1 |
1 |
0 |
1 |
0 |
24В |
1 |
0 |
0В |
0 |
Примечание: Знак «Х» означает, что сигнал может быть любой, как «0», так и «1». Из табл. 3.1 видно, что при сигнале «0» на входе Л1.Л2, контакт по линиям Л1 и Л2 передается сигнал «0» независимо от сигналов на других входах. При сигнале «1» на Л1.Л2 и сигнале «0» на Л1.Л2 конт 10А по линиям Л1 и Л2 передается сигнал «1», независимо от сигналов на других входах. Схема управления передатчиками ДП работает аналогично, отличие лишь в том, что точка В-ПрП ДП соединена с корпусом постоянно, а на вход ЗАП-7А в дежурном режиме подается сигнал «0», благодаря чему в точке Б-ПрП ДП устанавливается напряжение минус 24В. Кроме того, при переходе команды ПУСК сигнал «0» на Л2 устанавливается с помощью отдельного МУС ДОПОЛ. конт 25А ПрП ДП. Приемник принимает сигналы, передаваемые по этому каналу передатчиком КП и воспроизводит их на своем выходе «1» конт. 2А-Х1. Наличие тока в линии Л1 и, следовательно, состояние контактов реле KV1 зависит как от сигнала, передаваемого от КП к ДП, так и от сигнала, передаваемого в этот момент от ДП, как указано в табл. 3.2.
Таблица 3.2
|
Напряжение в точке А ДП |
Напряжение в точке А КП |
Наличие тока в линии Л1 |
Сигнал в точке Г (рис. 3.4.) |
|
0 |
0 |
нет |
1 |
|
0 |
24В |
есть |
0 |
|
24В |
0 |
есть |
0 |
|
24В |
24В |
нет |
1 |
Выявление сигнала, передаваемого от КП по линии Л1 производится путем логической обработки сигналов от контакта реле KV1 (сигнал в точке Г) и от схемы передатчика Л1 ДП (сигналы в точках Е, Ж, К) в соответствии с табл. 3.3. Обработка сигналов, принятых по каналу Л2 – ЗЕМЛЯ приводится таким же образом, выход приемника Л2 – контакт 3А «2» блока ПрП. В КП прием команд от ДП происходит аналогично, за исключением того, что во время передачи сигнала ЗАПУСК от КП, прием сигналов, поступивших от ДП, запрещается путем подачи сигнала «0» на конт. 5А УПР КП. При этом на выходах приемников Л1 и Л2 (конт. 2А и 3А)10 образуется сигнал «1», независимо от сигналов на других входах. Схема управления индикаторами DD5.3, DD5.4, DD4.2 используется в КП для высвечивания сигналов НОРМА, ОТРЫВ, ЗАМЫКАНИЕ с помощью светодиодных индикаторов, расположенных в блоке питания КП.11
Таблица 3.2
Обработка принятого сигнала в приемнике Л1 ДП
|
Сигнал, передаваемый от КП К ДП |
Схема ПрП ДП (рис. 3.4.) |
Сигнал на выходе приемника 2А-Л1 |
|||||||
|
Сигнал передаваемый от ДП |
Сигнал в точках схемы |
||||||||
|
Г |
Д |
Е |
Ж |
И |
К |
Л |
|||
|
0 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
|
0 |
1 |
0 |
1 |
1 |
1 |
1 |
0 |
1 |
0 |
|
1 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
|
1 |
1 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
Заключение
В результате курсового проектирования была разработана система автоматической подстройки частоты на основе однокристальной СПИ КР1816ВЕ51 со следующими параметрами: потребляемая мощность: 3,1 Вт, число обсуживаемых каналов - 4, частота опроса не менее 0,37 кГц.
Разработка системы была проведена с учетом требований, указанных в техническом задании.
Система обеспечивает индикацию канала, в котором отклонение текущей частоты от заданной превышает определённое значение.
Была разработана принципиальная схема устройства, алгоритм управления и программа на языке ассемблер.
Разработанная система может применяться регулировки частоты в различных устройствах и приборах.
Таким образом, устройство высокочастотного уплотнения «Атлас-Ф» предназначено для применения с системой передачи извещений «Фобос» и обеспечивает полудуплексный обмен информацией между ретрансляторами.
Список использованной литературы
Ефимчик М.К. Технические средства электронных систем: Учебное пособие. - М.: Тесей, 2006 – 188 стр.
Каяцкас А.А. Основы радиоэлектроники: Учеб. пособие для вузов. - М.: Высшая школа, 2003. – 314 стр.
Манаев Е.И. Основы радиоэлектроники: Учеб. пособие для вузов. -М.: Радио и связь, 2005. – 815 стр.
Головин О.В., Кубицкий А.А Электронные усилители. - М.: Радио и связь, 2008 – 126 стр.
Метрология и электроизмерения в телекоммуникационных системах: Учебник для вузов /А.С. Сигов, Ю.Д. Белик. и др./ Под ред. В.И. Нефедова. - 2-е изд., перераб. и доп. - М.: Высш. шк., 2008 – 62 стр.
Бакланов И.Г. Технологии измерений в современных телекоммуникациях. - М.: ЭКО-ТРЕНДЗ, 2007 – 354 стр.
1 Бакланов И.Г. Технологии измерений в современных телекоммуникациях. - М.: ЭКО-ТРЕНДЗ, 2007 – 354 стр.
2 Метрология и электроизмерения в телекоммуникационных системах: Учебник для вузов /А.С. Сигов, Ю.Д. Белик. и др./ Под ред. В.И. Нефедова. - 2-е изд., перераб. и доп. - М.: Высш. шк., 2008 – 62 стр.
3 Метрология и электроизмерения в телекоммуникационных системах: Учебник для вузов /А.С. Сигов, Ю.Д. Белик. и др./ Под ред. В.И. Нефедова. - 2-е изд., перераб. и доп. - М.: Высш. шк., 2008 – 62 стр.
4 Манаев Е.И. Основы радиоэлектроники: Учеб. пособие для вузов. -М.: Радио и связь, 2005. – 815 стр.
5 Манаев Е.И. Основы радиоэлектроники: Учеб. пособие для вузов. -М.: Радио и связь, 2005. – 815 стр.
6 Метрология и электроизмерения в телекоммуникационных системах: Учебник для вузов /А.С. Сигов, Ю.Д. Белик. и др./ Под ред. В.И. Нефедова. - 2-е изд., перераб. и доп. - М.: Высш. шк., 2008 – 62 стр.
7 Метрология и электроизмерения в телекоммуникационных системах: Учебник для вузов /А.С. Сигов, Ю.Д. Белик. и др./ Под ред. В.И. Нефедова. - 2-е изд., перераб. и доп. - М.: Высш. шк., 2008 – 62 стр.
8 Манаев Е.И. Основы радиоэлектроники: Учеб. пособие для вузов. -М.: Радио и связь, 2005. – 815 стр.
9 Метрология и электроизмерения в телекоммуникационных системах: Учебник для вузов /А.С. Сигов, Ю.Д. Белик. и др./ Под ред. В.И. Нефедова. - 2-е изд., перераб. и доп. - М.: Высш. шк., 2008 – 62 стр.
10 Манаев Е.И. Основы радиоэлектроники: Учеб. пособие для вузов. -М.: Радио и связь, 2005. – 815 стр.
11 Бакланов И.Г. Технологии измерений в современных телекоммуникациях. - М.: ЭКО-ТРЕНДЗ, 2007 – 354 стр.