Транзисторний перетворювач з дроселем в первинному ланцюзі
Зміст
Завдання
1. Вступ
2. Теоретична частина
3. Розробка структурної схеми
4. Розробка принципової схеми
4.1 Розробка силової частини
4.2 Розробка системи керування
5. Розрахунок силової частини і вузлів системи керування
5.1 Розрахунок силової частини
5.2 Розрахунок системи керування
6. Висновки
7. Література
Додатки:
1. Схема електрична структурна
2. Схема електрична принципова
3. Перелік елементів
4. Креслення друкованої плати
5. Програма мікропроцесора
1. Вступ
В даній курсовій роботі розроблений транзисторний перетворювач із дроселем у первинному ланцюзі на основі найпростішої схеми, із системою керування.
Система керування дозволяє правильно керувати роботою схеми.
Необхідність розробки даного перетворювача полягає в наступному: схема дає можливість усунути наскрізні струми й усунути можливість однобічного замагнічування силового трансформатора.
Актуальність розробленого перетворювача складається у використанні даного пристрою як більше надійного, енергоекономного приладу у відмінності від подібних(мостовий інвертор, інвертор з нульовим виводом).
Система керування перетворювача побудована на мікроконтролері, що дає можливість зменшити габарити вихідного пристрою, простоту використання й збільшити надійність приладу.
2. Теоретична частина
Перетворювач на рис.3.25, а можна розглядати як проміжну схему між мостовою схемою та схемою з середньою точкою, оскільки на інтервалі Т/2 коли відкриті VТ1 (VТ2) та VТ4 (VТ3), включена вся первинна обмотка, а на інтервалі (1 - )T/2, коли відкритий тільки VТ1 (VТ2), половина цієї обмотки.
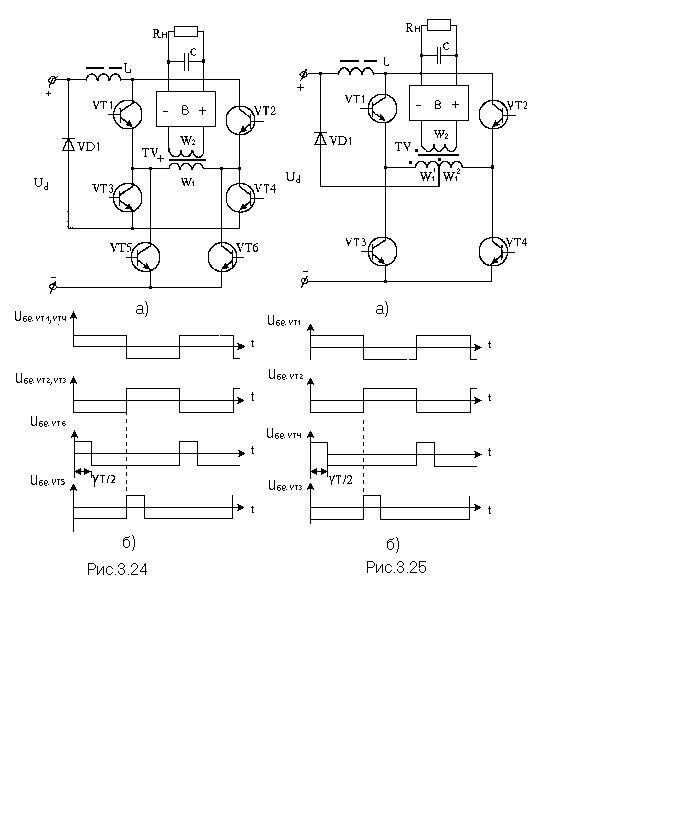
Тому регулювальна характеристика цього перетворювача буде відрізнятися від лінійної на відміну від раніше розглянутих перетворювачів.
Визначимо рівняння регулювальної характеристики перетворювача.
При цьому приймемо такі припущення:
- індуктивність дроселя L і ємність конденсатора C нескінченно великі, внаслідок чого пульсації струму і напруги відсутні;
- втрати потужності у всіх елементах перетворювача відсутні;
- тривалість фронтів переключення транзисторів та діода дорівнюють нулю;
- вольтсекундна площа на етапі накопичування енергії дроселем дорівнює вольтсекундній площині на етапі розсіювання енергії дроселем (середня напруга на дроселі за період дорівнює нулю) тобто:
 , (2.1)
, (2.1)
де U>Lнак>> >- напруга на дроселі на етапі накопичування енергії; U>Lроз>- напруга на дроселі на етапі розсіювання енергії.
Напруга на дроселі на
інтервалі
визначається різницею напруги джерела
живлення U>d>
і напруги U>2W1> на всій первинній обмотці трансформатора,
а на інтервалі (1
- )
- тільки напругою U>W1>
на одній з
первинних напівобмоток (
на всій первинній обмотці трансформатора,
а на інтервалі (1
- )
- тільки напругою U>W1>
на одній з
первинних напівобмоток ( ):
):
 ;
(2.2)
;
(2.2)
 .
(2.3)
.
(2.3)
Після підстановки (3.149) і (3.150) в (3.148), та після нескладних перетворень одержуємо:
 . (2.4)
. (2.4)
Регулювальна характеристика перетворювача у припущенні, що 2W>1>= W>2> представлена на рис.3.26.
3. Розробка структурної схеми
Випр. 1
Фільтр 1
Інвертор
Трансф.



1
Блок живлення

 80В,50Гц
80В,50Гц



К


Випр. 2



Система управл.
Фільтр 2
Навантаж.

Рис. 1 Схема електрична структурна
При підключенні мережі включається система керування зібрана на мікроконтролері, яка живиться від блоку живлення, що виробляє напругу 5 В, силова частина при цьому відключена. В момент проходження напруги мережі через нульову відмітку спрацьовує ключ.
Напруга отримана на виході першого випрямляча згладжується фільтром 1 для одержання постійної напруги на вході інвертора. На виході інвертора після високочастотного трансформатора одержуємо змінну напругу прямокутної форми зі шпаруватістю обумовленою системою керування СУ. Пройшовши вихідні випрямляч В2 і фільтр Ф2 ця напруга перетвориться в постійну і повністю передається на навантаження.
На систему керування знімається сигнал напруги на навантаженні. Залежно від співвідношення виміряної й необхідної напруг система керування змінює шпаруватість імпульсів керування інвертором для досягнення рівності цих напруг.
4. Розробка принципової схеми
4.1 Разработка силовой части
Схема електрична принципова силової частини приведена на рис.2.

Рис.2 Схема електрична принципова силової частини.
Вхідна синусоїдальна напруга через мостовий випрямляч зібраний на діодах VD1-VD4 перетворюється у двохпівперіодну напругу й згладжується за рахунок LC-фільтра зібраного на дроселі L1 і конденсаторі С1.
Постійна напруги надходить на вхід інвертора із середньою точкою зібраного на транзисторах VT2, VT3 і трансформаторі Т1з обмотками W1 й W2.
Транзистори VТ2 та VТ3 відкриті більше ніж півперіоду, тобто працюють з взаємним перекриттям. На інтервалі Т/2, коли відкриті обидва транзистори, відбувається накопичування енергії в дроселі до якого, через закорочення обмоток силового трансформатора, прикладається повна напруга живлення перетворювача. Передача енергії від джерела живлення в навантаження не відбувається і струм вторинної обмотки трансформатора дорівнює нулю. Діоди випрямляча виявляються закритими. При вимиканні одного з транзисторів енергія, накопичена в індуктивності, через трансформатор передається в навантаження. Електромагнітні процеси в даному режимі схожі з процесами у ШІП з підвищеною вихідною напругою.
Індуковане у вторинній обмотці W2 напруга, випрямляється мостовим випрямлячем на діодах VD6-VD9. На виході випрямляча одержуємо прямокутні імпульси. Згладжена вихідним фільтром на основі дроселя L2 і конденсатори С2 напруга надходить на активне навантаження, через яке протікає струм пропорційний прикладеній напрузі.
Діаграми роботи силової частини представлені на рис.3.
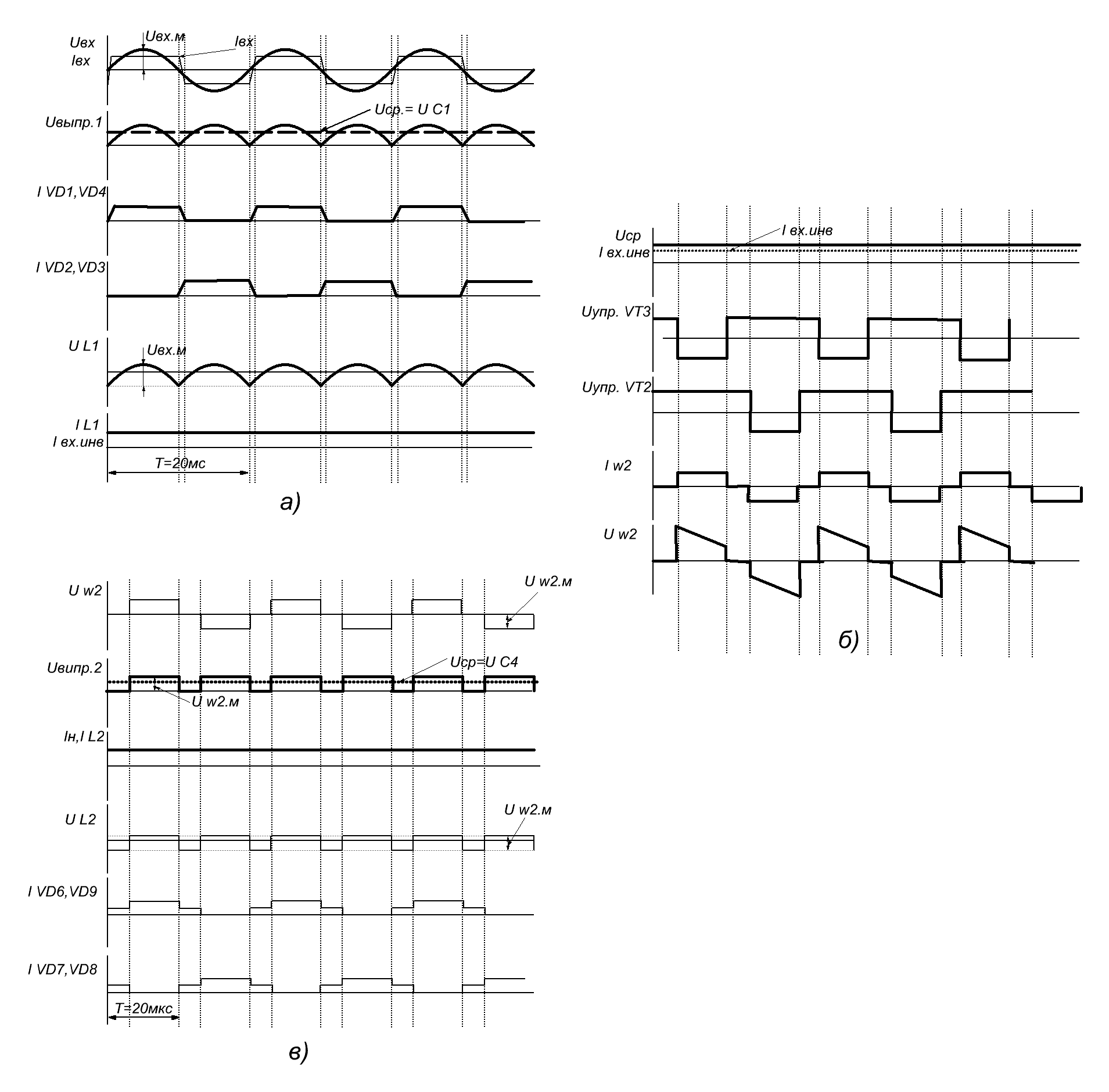
Рис.3 Діаграми роботи силової частини: вхідного випрямляча а), інвертора б) і вихідного випрямляча в).
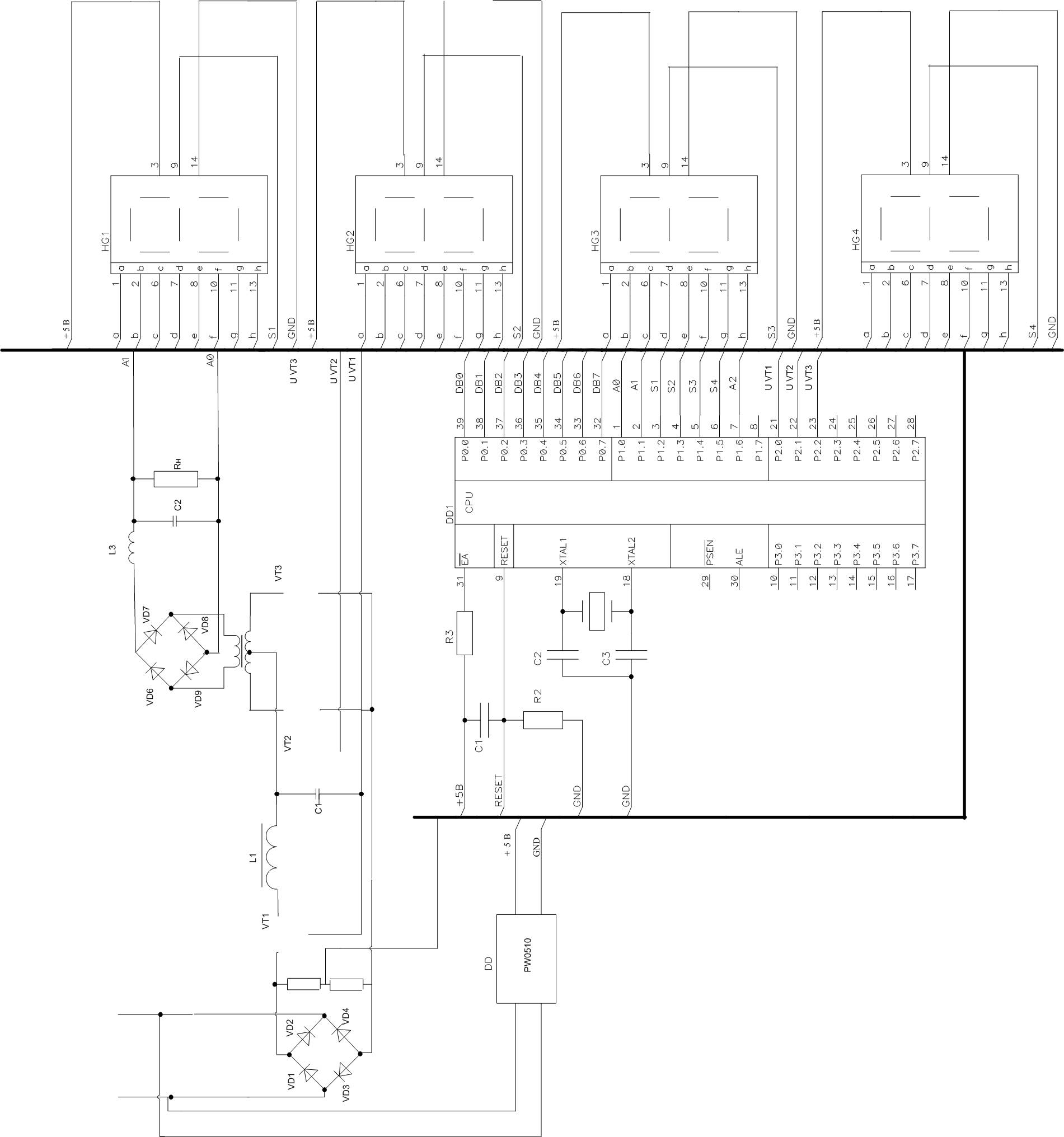
4.2 Розробка системи керування
Мікропроцесорна система керування зібрана на мікроконтролері (МК) ATmega16, схема підключення якого взята зі специфікації.
Робота системи керування.
Система керування живиться від напруги 5В яка подається із блоку живлення А1.
При включенні стабілізатора мікроконтролер DD1, знімаючи напруги з резистора R2 дільника напруги, підключає силову частину, замикаючи транзистор VT1 тільки при проходженні напруги мережі через нуль.
Знімаючи напругу з дільника, включеного паралельно навантаженню мікроконтролер одержує інформацію про струм, що протікає в навантаженні. Залежно від співвідношення вихідного струму й необхідного струму мікроконтролер змінює коефіцієнт заповнення імпульсів керування транзисторами інвертора VT2, VT3. У підсумку одержуємо керуючі напруги як на мал.3б.
Установка вихідної напруги в межах 600-1000В здійснюється за допомогою змінного резистора R2 і відображається на чотирьох 7-сегментних індикаторах.
5. Розрахунок силової частини і вузлів системи керування
5.1 Розрахунок силової частини
1) Знайдемо напругу на вторинній обмотці. Вона буде рівна напрузі навантаження

Приймемо

2) Знайдемо коефіцієнт трансформації з формули (2.4)
3) Знайдемо напругу на первинній обмотці з формули (2.3)


4) Знайдемо

5)Знайдемо напруги прикладені на транзисторах в закритому стані
Максимальна напруга на транзисторах VT1(VT2) падатиме на інтервалі часу коли відкриті VT2 і VT3 для VT1 та VT1 і VT4 для VT2 і буде рівна:
Застосовуючи формули (2.2) і (2.3) отримуємо



На транзисторах VT3 i VT4 максимальна напруга падатиме при відкритих VT1 і VT4 для VT3, та VT2 і VT3 для VT4 і буде рівна

6) Знайдемо струм на первинній обмотці трансформатора
де
Струм на дроселі рівний
7) Знайдемо максимальний струм колектора для транзисторів
Виходячи з цих параметрів вибираємо транзистор:
фірми IR IRG4RC20F з допустимою напругою 600В і максимальним струмом 22 А. Припустима розсіювана потужність 66 Вт
8) Знаходимо струм на діоді VD1
Знаходимо максимальну зворотню напругу на діоді:


Вибираємо діод
6A4 фірми Rectron з максимальною зворотною напругою 400В і максимальним прямим струмом 6А.
9) Розраховуємо вихідний фільтр


Вибираєм конденсатор та дросель:
Конденсатор моделі К78-2 ємністю 2.2 мкФ і напругою 1000В.
Вибираєм дросель «PULSE» PE – 53121 з параметрами : L>др>=2 мГн, I>L>=5 A.
10) Розрахуємо вихідний випрямляч
Зворотня напруга на діоді

Вибираєм діоди:
M6 з максимальню зворотною напругою 800В і максимальним прямим струмом 1А.
11) Розрахунок трансформатора




Знайдемо габаритну потужність трансформатора
де
 =0.2
Тл –зміна магнітної індукції (броньовий
пластинчастий)
=0.2
Тл –зміна магнітної індукції (броньовий
пластинчастий)
 =2.2
А/мм2
– густина струму
=2.2
А/мм2
– густина струму
 =
0.9 – коефіцієнт, ефективного заповнення
площі поперечного перерізу сердечника
магнітопровода (товщина 0.35мм)
=
0.9 – коефіцієнт, ефективного заповнення
площі поперечного перерізу сердечника
магнітопровода (товщина 0.35мм)
 =0.28
–степінь заповнення вікна сердечника
міддю
=0.28
–степінь заповнення вікна сердечника
міддю

Вибираєм наступний типорозмір сердечника Ш12х25, для якого
Знайдемо число витків в обмотках:
Знайдемо діаметр обмоточних проводів:
Вибираєм обмоточний провід для первинної обмотки ПЭТВ1(S>m>=1.75 мм2,
D>m>=1.7 мм, D>из>=1.8 мм)
Вибираєм обмоточний провід для вторинної обмотки ПЭТВ1(S>m>=0.92 мм2,
D>m>=0.8 мм, D>из>=0.85 мм)
5.2 Розрахунок системи керування
1) В системі керування побудованої на мікро контролері ATMega16 використовуються стандартні елементи обвісу їх номінали вказані нижче:
Конденсатор С5 = 0,1 мкФ К10-17А-Н50
Конденсатор С3 = 2,4 пФ МБГО-2-630В
Конденсатор С4 = 2,4 пФ МБГО-2-630В
Резистор R2 = 8,2 кОм TD4A
Резистор R3 = 8,2 кОм TD4A
Кварцовий резонатор Х1 6МГц РК456МИ
2) 4 Семисегментні індикатори фірми Ningbo G-nor Electronics моделі GNS-70011BD з напругою 4В і струмом 20мА.
3) На вході мікро контролера розташовується модуль живлення фірми КВІНТАЛ моделі 5ПМ з характеристиками:
Вхідна напруга – 150-250 В
Частота мережі живлення – 47-430 Гц
Вихідна напруга – 5 В
6. Висновки
Розрахований перетворювач із дроселем у первинному ланцюзі на основі найпростішої схеми відповідає вимогам завдання. У роботі були розраховані компоненти схеми й підібрані по відповідних параметрах. Керування перетворювачем здійснюється за допомогою системи, побудованої на мікроконтролері, що дає можливість зменшити габарити вихідного пристрою, простоту використання й збільшити надійність приладу. Розраховано основні параметри перетворювача, що дає можливість оцінити даний пристрій. Можна говорити про високу надійність приладу, тому що підібрані елементи із сучасної бази, рівень безвідмовної роботи яких високий, погрішність перетворення мала.
7. Література
Довідник. Джерела електроживлення РЕА. Г. Найвельт, Москва, 1958.
Додік С.Д. Джерела електроживлення на напівпровідникових пристроях.
Дроселі. Довідник Міністерства електронної промисловості СРСР.
Конденсатори. Довідник Міністерства електронної промисловості СРСР.
Білопольський І.І. Розрахунок трансформаторів і дроселів. М.: Енергія, 1973.
Довідник. Напівпровідникові пристрої. Голомедова, М.: 1988.
Випр. 1
Фільтр 1
Інвертор
Трансф.
1
Блок живлення
80В,50Гц
К
Випр. 2
Система керув.
Фільтр 2
Навантаж.
Подпрограмма установок и инициализации
//Watchdog initialize
// prescale: 2048K
void watchdog_init(void)
{
WDR(); //this prevents a timout on enabling
WDTCR = 0x0F; //WATCHDOG ENABLED - dont forget to issue WDRs
}
void port_init(void) //инициализация портов
{
DDRA = 0b00110100;
PORTA = 0b000000000;
DDRD = 0b11111111;
PORTD = 0b00000000;
DDRB
=0b11111111;
PORTB = 0b00000000;
}
void timer1_init(void) //инициализация таймера на время 18мкс
{
TCCR1B = 0x00; //stop
TCNT1H = 0x3C; //setup
TCNT1L = 0xB0;
OCR1AH = 0xC3;
OCR1AL = 0x50;
OCR1BH = 0xC3;
OCR1BL = 0x50;
ICR1H = 0xC3;
ICR1L = 0x50;
TCCR1A = 0x00;
}
void init_devices(void) //инициализация устройств
{
CLI();
watchdog_init();
port_init();
timer1_init();
SREG = 0b10000000;
ADCSRA = 0b10000110; //инициализация АЦП (режим)
ADMUX = 0b11100011; // инициализация АЦП (выбор РА3)
MCUCR = 0x00;
TIMSK = 0x04; //прерывание по таймеру 1
GICR = 0x00;
SEI();
}
Подпрограмма функций
unsigned int out,set ,Ton;
int high,low,b,tint1,des,edi;
int mas_code[10]={0b01000000,0b01111001,0b00100100,0b00110000,
0b00011001,0b00010010,0b00000010,0b01111000,0b00000000,0b00010000};
void BCD(int b) //BCD-преобразование
{
des=((b%100)/10);
edi=((b%100)%10);
}
void delay_mcs(unsigned int tmp) //задержка
{
unsigned int tmp1;
tmp1=tmp*10;
while(tmp1>0)
{tmp1--;}
}
void start(void) //функция запуска стабилизатора
{
ADCSRA = 0b11000110; //запуск АЦП
delay_mcs(10);
low=ADCL; high=ADCH;
ADCSRA = 0b01000110; //остановка АЦП
Uin = high;
while(Uin != 0)
{delay_mcs (100);}
PORTA = 0b000000100; //VT1
}
void vol(void) //определение напряжения нагрузки и необходимого тока за 2мкс, индикация
{
ADMUX = 0b11110000; // инициализация АЦП (выбор РА0,РА1)
ADCSRA = 0b11000110; //запуск АЦП
low=ADCL; high=ADCH; //считывание напряжения
out = high; //запись в регистр
ADCSRA = 0b01000110; //остановка АЦП
ADMUX = 0b11100110; // инициализация АЦП (выбор РА6)
ADCSRA = 0b11000110; //запуск АЦП
low=ADCL; high=ADCH; //считывание напряжения
set = high; //запись в регистр
ADCSRA = 0b01000110; //остановка АЦП
if(out<set) {Ton++;}
if(out>set) {Ton--;}
BCD(set);
PORTB= mas_code[edi];
PORTD= mas_code[des];
}
#pragma interrupt_handler timer1_ovf_isr:9
void timer1_ovf_isr(void) //подпрограмма прерывания по таймеру 1
{
tint1 = 1;
TCNT1H = 0x3C;
TCNT1L = 0xB0;
}
Основная программа:
// Target : M16
// Crystal: 10.000Mhz
#include <iom16v.h>
#include <init.h>
#include <functions.h>
#include <math.h>
#include <macros.h>
unsigned int T;
void main(void)
{
init_devices();
start();
PORTA&0b001000000 = 0;
PORTA&0b000100000 = 0;
Ton = 10;
while(1)
{
vol();
tint1=0;
TCCR1B = 0x01; //запуск таймера
T = 0;
while (T<=Ton){ PORTA&0b001000000 = 1;T++}
else { PORTA&0b001000000 = 0; PORTA&0b000100000 = 0;} //VT2
while(tint1 != 1)delay_mcs(0);
vol();
tint1=0;
TCCR1B = 0x01; //запуск таймера
T = 0;
while (T<=Ton){ PORTA&0b000100000 = 1;T++}
else { PORTA&0b001000000 = 0; PORTA&0b000100000 = 0;} //VT3
while(tint1 != 1)delay_mcs(0);
}
}