Кинетическая энергия манипулятора (работа 1)
КИНЕМАТИКА
0100090000031602000002009601000000009601000026060f002203574d46430100000000000100d6b10000000001000000000300000000000000030000010000006c0000000000000000000000350000006f0000000000000000000000362200008910000020454d4600000100000300001000000002000000000000000000000000000000c0120000131a0000cb0000001b010000000000000000000000000000f818030078510400160000000c000000180000000a000000100000000000000000000000090000001000000017080000e8030000520000007001000001000000a4ffffff00000000000000000000000090010000000000cc04400022430061006c006900620072006900000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000001100c04b110010000000244f1100a44c1100524f6032244f11001c4c1100100000008c4d1100084f1100244f6032244f11001c4c110020000000076f2e311c4c1100244f110020000000ffffffff2c28ee00826f2e31ffffffffffff0180ffff01803fff0180ffffffff0000000000080000000800004300000001000000000000005802000025000000372e9001cc00020f0502020204030204ef0200a07b20004000000000000000009f00000000000000430061006c006900620072000000000000000000e44c110010232e3130be0f3244501100504c1100ca39273108000000010000008c4c11008c4c1100087a253108000000b44c11002c28ee006476000800000000250000000c00000001000000250000000c00000001000000250000000c00000001000000120000000c00000001000000180000000c0000000000000254000000540000000000000000000000350000006f0000000100000055558740a0ab87400000000057000000010000004c00000004000000000000000000000015080000e803000050000000200000003600000046000000280000001c0000004744494302000000ffffffffffffffff18080000e9030000000000004600000014000000080000004744494303000000250000000c0000000e000080250000000c0000000e0000800e000000140000000000000010000000140000000400000003010800050000000b0200000000050000000c02a2004e01040000002e0118001c000000fb02f1ff0000000000009001000000cc0440002243616c6962726900000000000000000000000000000000000000000000000000040000002d010000040000002d010000040000002d0100000400000002010100050000000902000000020d000000320a0e00000001000400000000004e01a200200009001c000000fb020300010000000000bc02000000cc0102022253797374656d0000000000000000000000000000000000000000000000000000040000002d010100040000002d010100030000000000
I Определить скорость и ускорение точки М методом простого движения точки
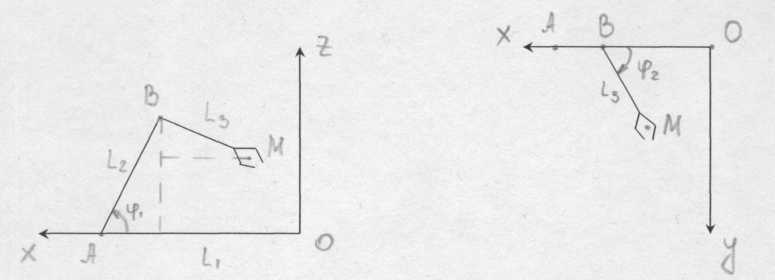
Составим уравнения точки М
> >
>
> >
>
> >
>
Определим проекции скорости точки М на оси координат
> >
>
> >
>
> >
>
Квадрат модуля скорости точки М вычислим по формуле:
> >
>
> >
>
Определим проекции ускорения точки М на оси координат
> >
>
> >
>
> >
>
Модуль ускорения точки М
> >
>
II Определить скорость и ускорение точки М методом сложного движения точки
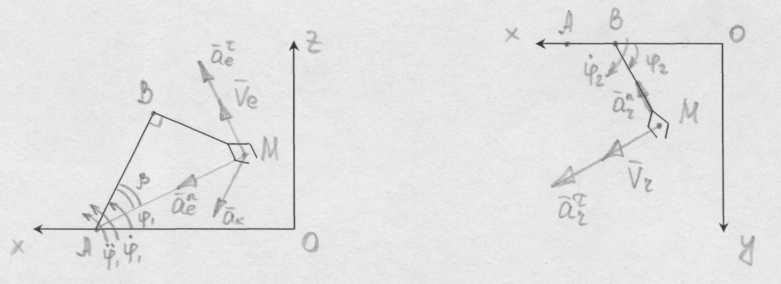
По теореме о сложении скоростей имеем:
> >
>
> >
>
> >
>
> >;
>
>;
>
 >;
>
>;
>
 >
>
По методу проекции имеем:
> >
>
> >
>
> >
>
По теореме о сложении ускорений имеем:
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
По методу проекции имеем:
> >
>
> >
>
> >
>
Модуль ускорения точки М
>>
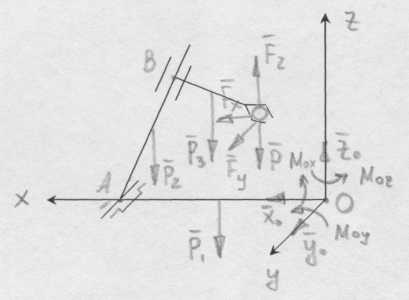
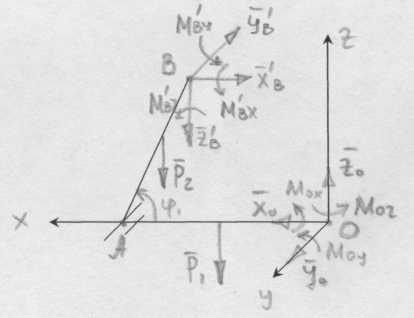
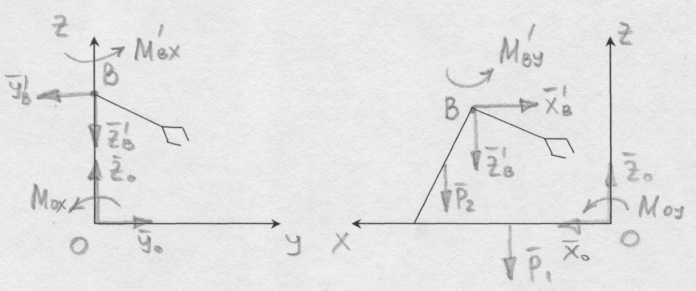
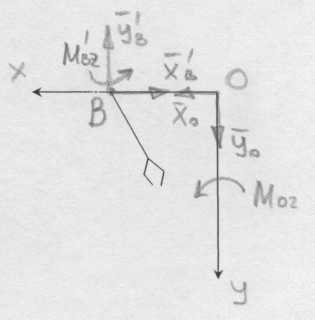
СТАТИКА
Дано:
-
φ>1>=-30
F>x>=4 H
l>1>=0,6 м
S>0>=1 см2
φ>2>=-75
F>y>=6 H
l>2>=0,6 м
ρ>(стали)>=7,8 г/см3
F>z>=2 H
l>3>=0,4 м
g=10 м/с2
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
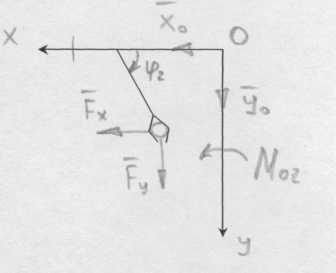
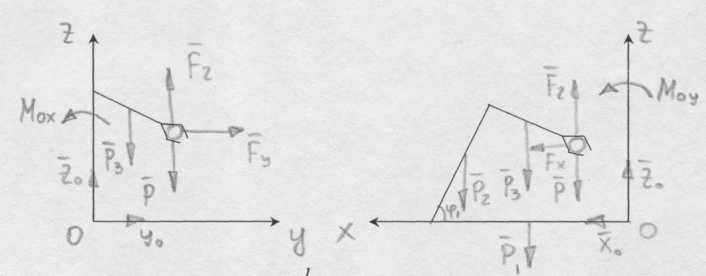
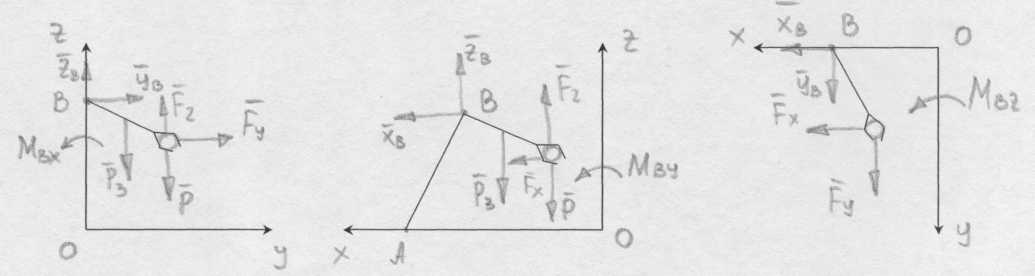
Рассмотрим равновесие всего манипулятора
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
Рассмотрим равновесие руки манипулятора
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
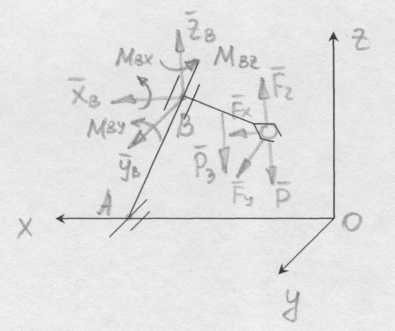
Рассмотрим равновесие без руки манипулятора
>
 >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
ДИНАМИКА
Дано:
-
l>1>=0,6 м
m>1>=0,468 кг
t=2c
l>2>=0,6 м
m>2>=0,468 кг
l>3>=0,4 м
m>3>=0,312 кг
g=10 м/с2
m=0,5 кг
> >
>
> >
>
> >
>
> >
>
n=2 – число степеней свободы
>
 >
>
> >-
Уравнения Лагранжа 2 рода
>-
Уравнения Лагранжа 2 рода
> >
>
Определим кинетическую энергию манипулятора
> >
>
> >,
т.к. первая деталь манипулятора неподвижна
>,
т.к. первая деталь манипулятора неподвижна
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
Вычисляем частные производные
> >
>
> >
>
> >
>
> >
>
Вычисляем обыкновенные производные по времени
> >
>
> >
>
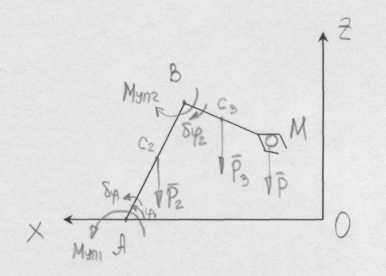
Для определения обобщенных сил сообщаем системе возможные перемещения
Активные силы: М>УП1, >М>УП2, >Р>1,> Р>2,> Р>3,> Р>М>.
> >
>
> >
>
1) >
 >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
> >
>
2) >
 >
>
> >
>
> >
>
Подставляем преобразованные выражения в уравнения Лагранжа 2 рода
> >
>
> >
>
> >
>
> >
>