Электропривод (работа 1)
Пермский государственный технический университет.
Кафедра электрификации и автоматизации
горных предприятий.
Курсовая работа.
« Расчёт и выбор оборудования электропривода
по системе генератор-двигатель»
Выполнил студент группы
ЭПУ-97 Олейник В. В.
Принял: Васильев Б. В.
Пермь 1999 г.
ПЕРМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра ЭАГП_________
Утверждаю:
Зав. кафедрой А. Д. Динкель
« ___ « ____________ 1999 г.
Задание
по курсовому проектированию
Студенту Олейнику Виктору Владиславовичу____________________
Тема проекта Расчёт параметров и выбор электрооборудования ___
___________по системе “Генератор-двигатель”_____________________ ________________________________________________________________________________________________________________________________________________________________________________________________
Срок сдачи законченного проекта _______20 января 1999 г._______
Исходные данные к проекту:
а) программа и стабильность ______ ________________________________
__ ___ ____
б) режим работы ______курсовая работа____ _____________________
в) наименование объекта________________________________________
г) особые указания_____________________________________________
___ _ F1= 13т; F2= 16.25т; F3= 10.5т; F4= 3.3т; F5=5.3т;____ __________________ __t1=13; t2=20; t3=52; t4=20; t5= 13;___________ _ _________________ _ n1=n4= 4 об/мин_____ ______________
_______________________________n2=n3=26об/мин____________________ ______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ _______________________
Содержание расчётно-пояснительной записки, перечень подлежащих разработке вопросов:
1. Введение__________________________________________
2. Расчёт мощности двигателя, техническая_______________ характеристика выбранного двигателя__________________ __________
3. Расчёт параметров и выбор другого силового___________ электрооборудования (в соответствии с составленной силовой_________ схемой)._______________________________________________________
4. Составление структурной схемы электропривода_ _ (включая___ САР).____ _ ____________________ ____
5. Расчёт параметров структурной схемы_САР привода. _ ______ _
_____________ ___
6. Расчёт статических характеристик привода:______ _ регулировочных,_механических характеристик в разомкнутой_________ и_замкнутой системах.__ _________
7. Расчёт переходных процессов в разомкнутой и замкнутой___
системах.______________________________________________________
8. Выводы._ ________________________________________
Дата выдачи задания « ____» ________________ 1999г.
Консультант __________________
Задание принято к исполнению ____________________
Разработал _______ /Олейник В.В./
2. Содержание.
1. Задание.
2. Содержание.
3. Введение.
4. Силовая схема привода.
5. Расчет и выбор силового электрооборудования привода.
6. Составление структурной схемы привода и расчет ее
параметров
7. Расчет статических характеристик привода.
8. Расчет регулировочной характеристики привода.
9. Расчет динамических характеристик привода.
10. Заключение.
11.Список литературы
3. Введение.
Современные автоматизированные электроприводы представляют собой сложные динамические системы, включающие в себя различные линейные и нелинейные элементы (двигатели, генераторы, усилители, полупроводниковых и другие элементы), обеспечивающие в своем взаимодействии разнообразные статические и динамические характеристики.
Электропривод по системе Г-Д с тиристорным возбуждением генератора находит широкое применение во многих отраслях промышленности. Достаточно сказать, что большинство мощных электроприводов постоянного тока различного назначения выполнены по системе Г-Д. Это объясняется рядом ее важных преимуществ по сравнению с другими приводами;
-высокая жесткость механических характеристик;
-ббольшой диапазон и плавность регулирования скорости;
-отсутствие пусковых сопротивлений и потерь энергии в них;
-простота реверса двигателя без переключений в цепи якоря;
-ппростота перевода привода в режимы торможения с рекуперацией энергии в сеть;
-относительная простота схемного решения системы управления приводом, не требующая высокой квалификации обслуживающего персонала. Наряду с перечисленными достоинствами система Г-Д не лишена существенных недостатков, к числу которых относятся:
- недостаточное быстродействие привода;
- неустойчивая работа двигателя в зоне низких скоростей, ограничивающая диапазон регулирования;
- низкий коэффициент полезного действия, не превышающий 75-80%;
- высокая установленная мощность, равная трехкратной мощности регулируемого двигателя; - большая занимаемая площадь.
5. Расчет и выбор силового электрооборудования привода. Выбор двигателя.
Исходные данные:
F1=13т; F2=16.25т; F3=10.5т; F4=3,3т; F55.3т
t1=13сек; t2=20сек; t3=52сек; t 4=20сек; t5=13сек
время паузы: t6=100сек.
Определяем эквивалентную мощность Fэкв:
Выбор двигателя должен удовлетворять неравенствам:
Pэф
 Pн.дв
Iэф
Iн.дв
Mэф
Mн.дв
Pн.дв
Iэф
Iн.дв
Mэф
Mн.дв
Произведя вычисления результаты, которых удовлетворяют неравенствам, выбираем двигатель типа П2-18170-0.315
Технические характеристики двигателя.
Тип........................................................................................... П2-18170-0.315 Мощность, кВт.......................................................................................... 315 Напряжение номинальное. В................…………………........................ 440 Напряжение возбуждения, В .....................................……........................220 Частота вращения номинальная, об/мин...................................................36 КПД, % ....................................................................................................... 78 Сопротивление обмотки при 15°, 0м
якоря..................................................................................................... 0,00895 добавочных полюсов............................................................................ 0,0012 Ток двигателя номинальный, А .............................................................920 Динамический момент инерции 1000 кгм.................................................1.2
Произведем дополнительные вычисления:
мощность возбуждения:
Рв= 3%*Pдв= 0.03*315=9.45 кВТ
ток
возбуждения:
сопротивление возбуждения:
Выбор генератора.
Генератор выбираем по напряжению и мощности двигателя.
Uном.г
 Uном.д
Uном.д
Iя.ном.г
Iя.ном.д
PГ=

Где:
Pг - мощность генератора, кВт;
Pд - мощность двигателя, кВт;
 - кпд двигателя,
о.е;
- кпд двигателя,
о.е;
Iя.ном.г – номинальный ток якоря генератора, А;
Iя.ном.д- номинальный ток якоря двигателя, А.
Скорость двигателя не является критерием при выборе генератора.
По параметрам удовлетворяет генератор типа П-142-6К
Краткая техническая характеристика генератора П-142-6К
Тип _______________________________________________П-142-6К
Мощность, кВт__________________________________________ 430
Напряжение якоря, В _____________________________________460
Номинальная частота вращения, об/мин_____________________1000
Напряжение возбуждения, В _______________________________220
КПД,
% ________________________________________________93,5

Вычислим ток якоря генератора:

Выбранный нами генератор удовлетворяет неравенствам:
Uном.г
Uном.д,
т.е. 460 (В)
 440 (В)
440 (В)
Iя.ном.г Iя.ном.д , т.е. 1000 (А) А)
Выбор гонного двигателя.
Основной критерий выбора гонного двигателя - это равенство скоростей вращения якоря генератора и ротора гонного двигателя
Кроме того нужно учитывать:
где
Uгон.д- напряжение гонного двигателя, В;
Pгон.д – мощность гонного двигателя, кВт.
По параметрам подходит асинхронный двигатель АД-4
Краткая техническая характеристика двигателя АД-4.
Тип _____________________________________________________АД-4
Мощность, кВт _____________________________________________440
Скорость ротора, об/мин ____________________________________1000
Скольжение, % _____________________________________________1,5
КПД,% ___________________________________________________94,4
cos , % ___________________________________________________0,86
Выбор тиристорного возбудителя двигателя.
Тиристорный возбудитель двигателя должен обеспечивать три режима:
- ослабленный;
- форсированный;
- нормальный.
В ослабленном режиме:
В номинальном режиме работы:
В форсированном режиме:
Uфор=(3Uв.ном.д=660В
Мощность тиристорного возбудителя двигателя:
Sтвд = Uв.ном.дIв.ном.дKп
где
Kп = 1,041,05 - повышающий коэффициент мощности трансформатора.
Sтвд = Uв.ном.д Iв.ном.д Kп = 220 *4З * 1,04 = 9838 ВА
По всем параметрам подходит нереверсивный тиристорный возбудитель: Тип_____________________________________________АТЕЗ-50/230Р-У4 Напряжение питания сети________________________________190-220 В Номинальный выпрямленный ток______________________________50 А Максимальный ток__________________________________________100 А Номинальная мощность ____________________________________11.5 кВт
Выбор тиристорного возбудителя для генератора.
Uтвг.max =1.15Uв.ном.г = 1,15*230=264,5В
Iном.твг = KзIв.ном.г = 1,15*58.6= 66,7 A
По всем параметрам подходит реверсивный тиристорный возбудитель: Тип____________________________________________АТЕРЗ-50/230Р-У4 Напряжение питания сети ______________________________190-220 В Номинальный выпрямленный ток _________________________50 А Максимальный ток _______________________________________100 А Номинальная мощность ____________________________________11.5 кВт
Выбор автомата главного тока.
Автомат главного тока выбирают по максимальному току и выпрямленному напряжению.
Imax= 2,5Iд.ном = 2,5* 920 = 2300 А
Тип выключателя_____________________ ВЛТ-42-4000/6-А-У4 Номинальный ток _________________________________2500 А Номинальное напряжение ___________________________600 В
6. Составление структурной схемы привода и расчет ее параметров.
На рисунке представлена структурная схема электропривода по системе Г-Д с тиристорным возбуждением генератора.
Двигатель представлен колебательным звеном, а генератор и тиристорный преобразователь представлены апериодическими звеньями.



















Mc(P)
Ic(P)
Uc(P) Uв(P) Uг(P) Uг(P) Iя(P) Iд(P)
Uупр(P) n(p)
Uom(P) Eд(P)
где
Uн.д - номинальное напряжения двигателя, В
1я.д - номинальный ток якоря двигателя, А
Rя.д - сопротивление якорной цепи двигателя, 0м
пн - номинальные обороты двигателя, об/мин

Определим сопротивление якорной цепи генератора
г
де
-КПД
генератора, о.е.
Uн.г -номинальное напряжение генератора, В
Iн.г -номинальный ток генератора, А

Определим суммарное сопротивление якорной цепи двигателя и генератора

где
Rя.д -сопротивление якоря двигателя, 0м
Rд.п.д -сопротивление добавочных полюсов двигателя, 0м
Rя.г -сопротивление якоря генератора, 0м
Причем, сопротивления R, R, R, входящие в эту электрическую
цепь мы не учитываем т.к. их величины на два порядка меньше сопротивлений представленных в этой формуле.
О
пределим
электромеханическую составляющую
привода:

где
Jдв -момент инерции двигателя,
Jдв = 1.2Jдв -момент инерции рабочей машины,
g
=
9,8 -ускорение свободного
падения, м/с

Определим индуктивность якоря генератора:

где
Uном -номинальное напряжение генератора, В
1ном -номинальный ток генератора, А
пном -номинальная скорость вращения, об/мин
р = 6 -число пар полюсов генератора
Найдем суммарную индуктивность двигателя и генератора:

Определим постоянную времени якорной цепи привода:
Постоянная времени Т = 0,003 для многоканальной СИФУ.
где
Рном -номинальная мощность генератора, кВт
nном -номинальное число оборотов генератора, об/мин

Найдём,
где U упр.max - максимальное напряжение управления В.
7. Расчет статических характеристик привода.
Для дальнейших расчетов необходимо преобразовать исходную структурную схему.
Mc(P)
Ic(P)
Uc(P) Uв(P) Uг(P) Uг(P) Iя(P) Iд(P)
Uупр(P) n(p)







 Uom(P)
Eд(P)
Uom(P)
Eд(P)
Iя Iд
Ic
Mc
Для преобразованной структурной схемы запишем систему уравнений:
Воспользуемся методом подстановок приведенных выражений друг в друга и ориентируясь на то, что в левой части - скорость, а в правой - момент конечном выражении получим:

П
редположим,
что р= 0 (для
замкнутой системы):
Предположим,
что Кт
= 0 (разомкнутая система):
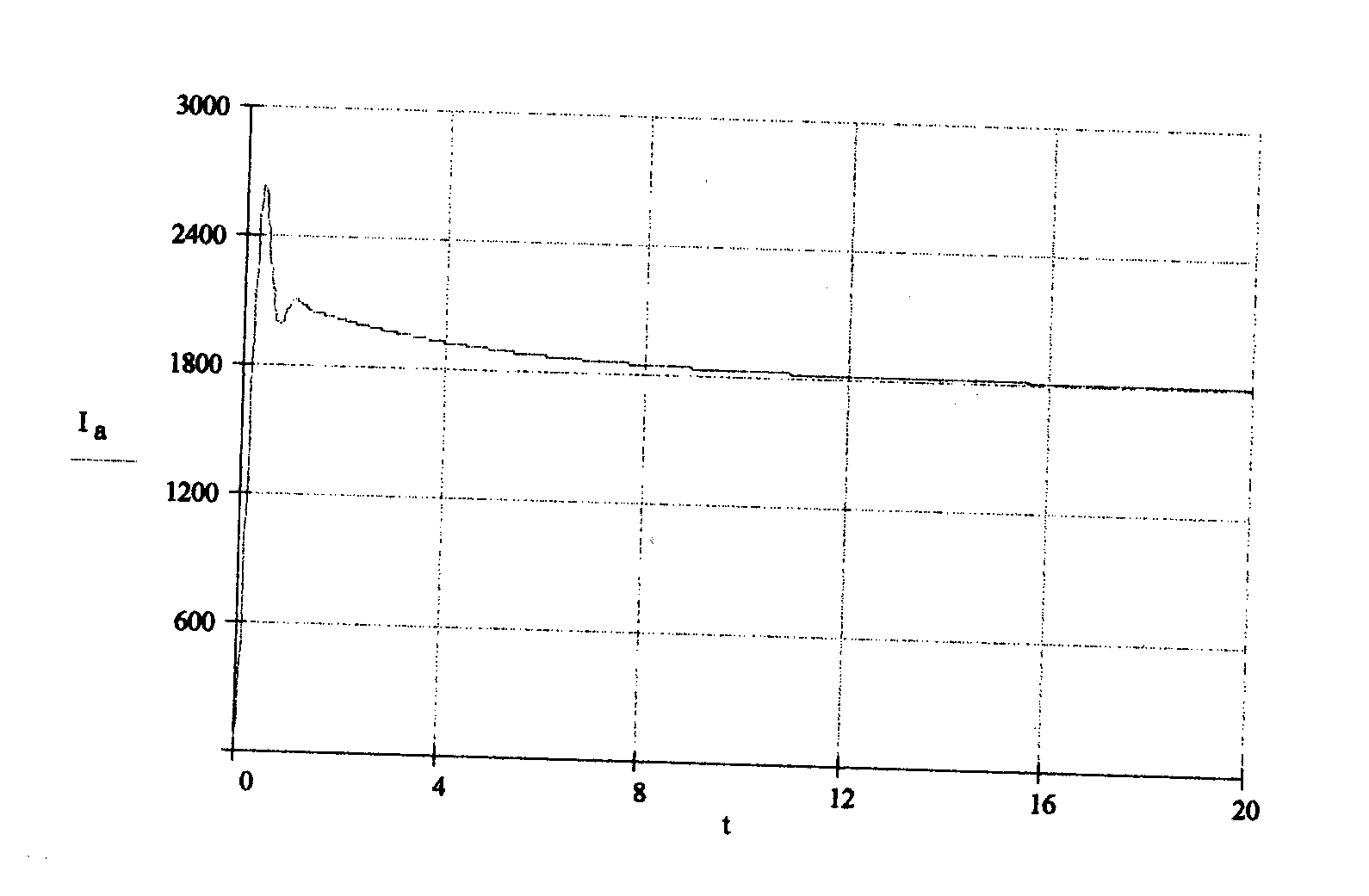
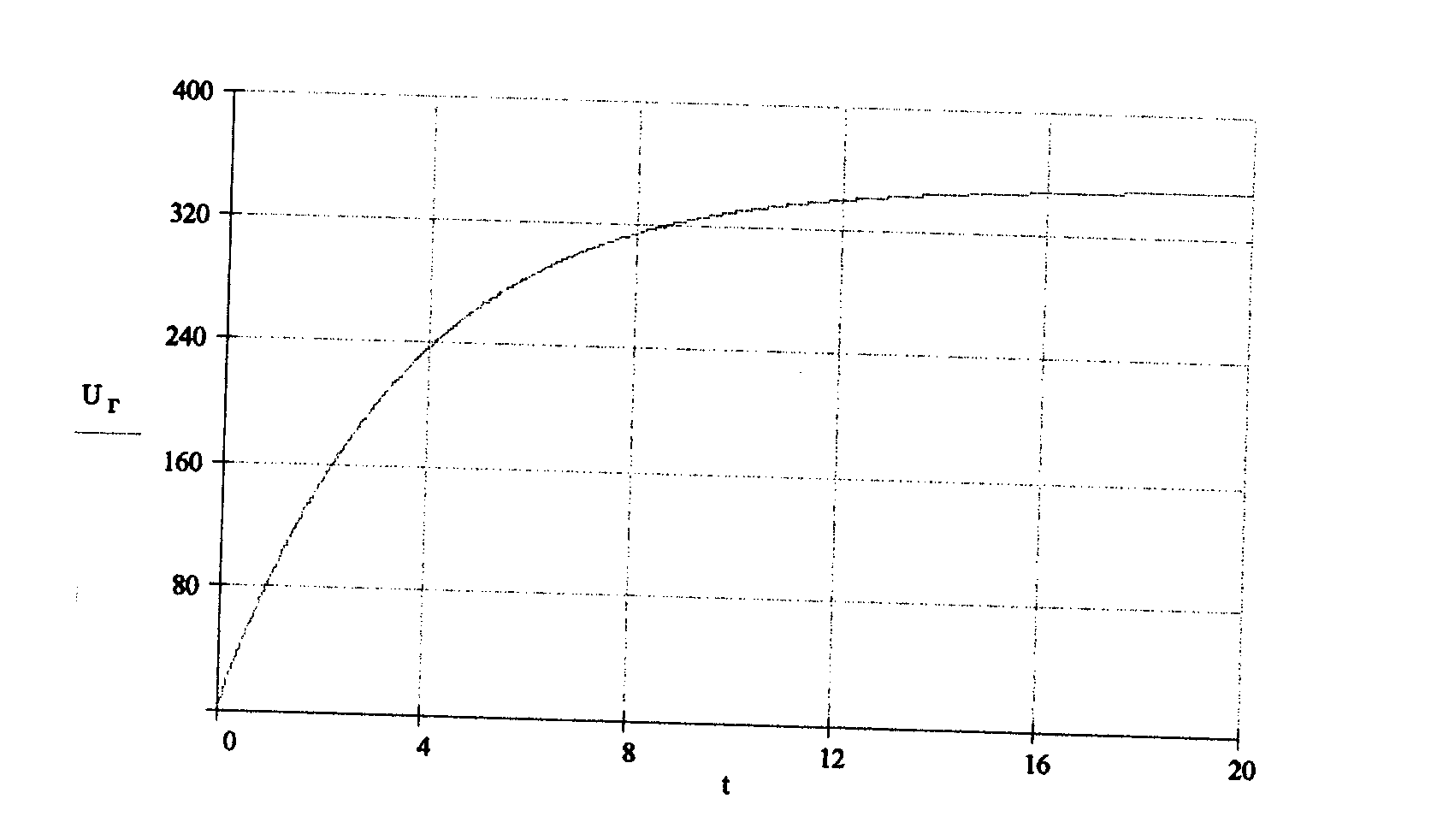
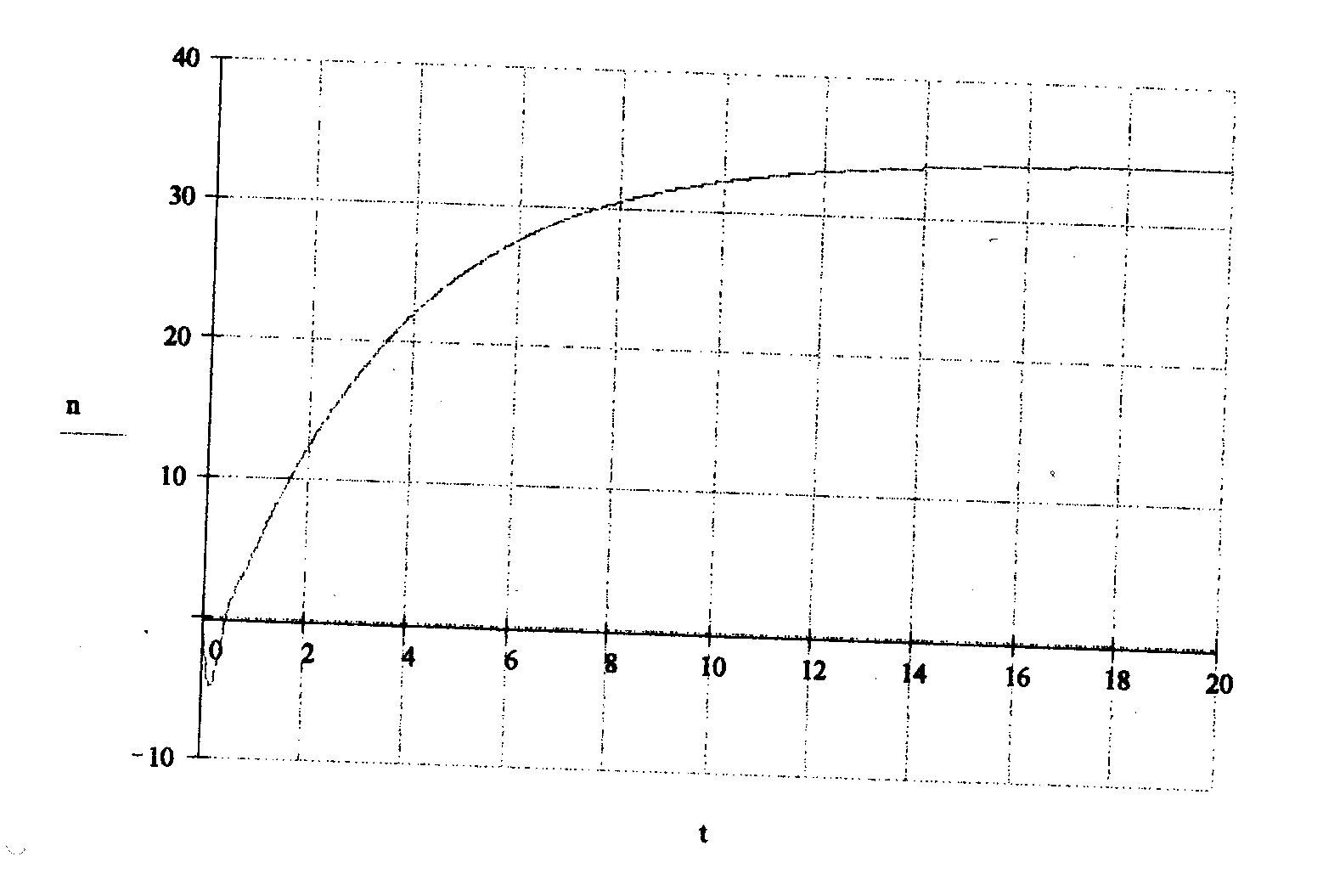
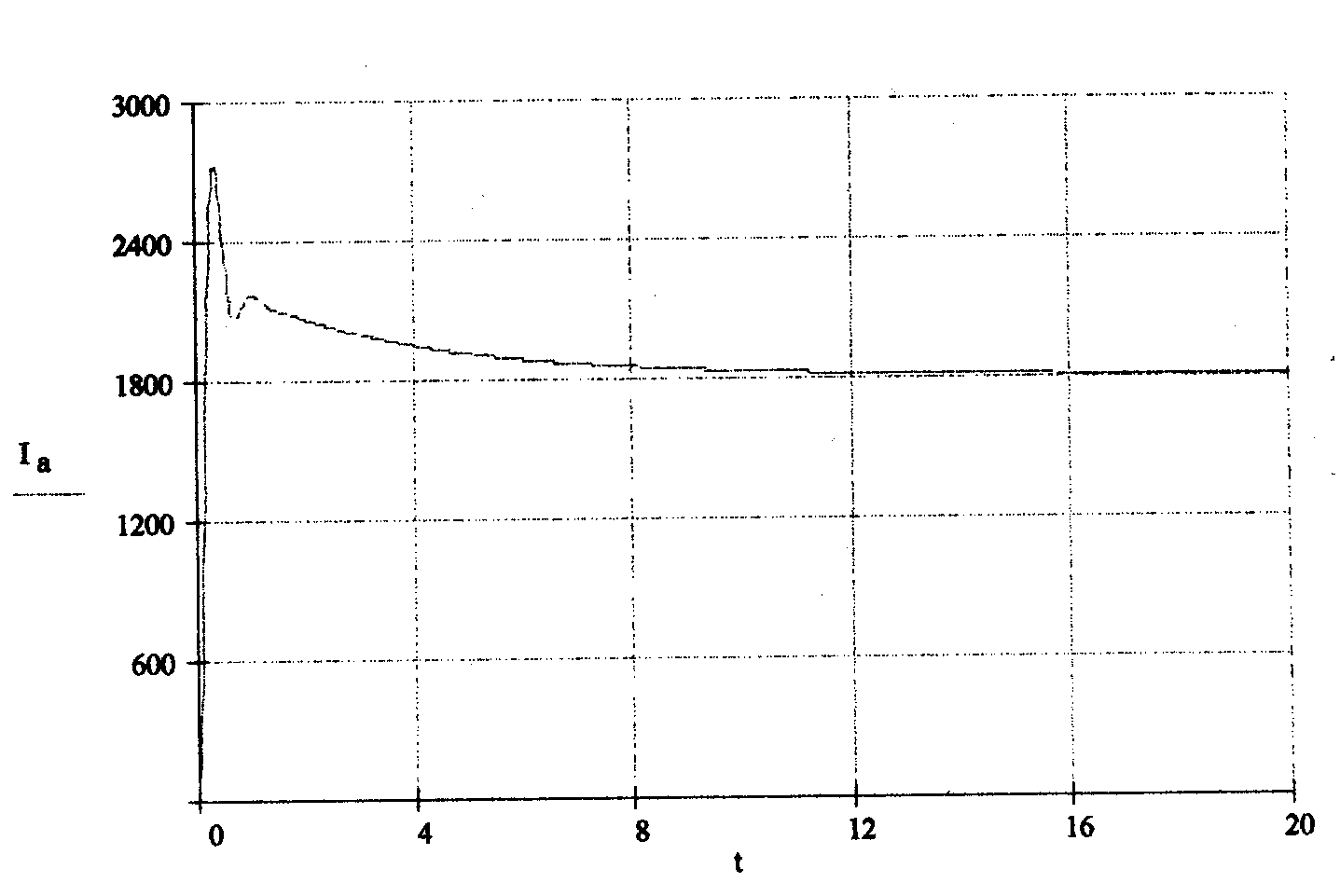
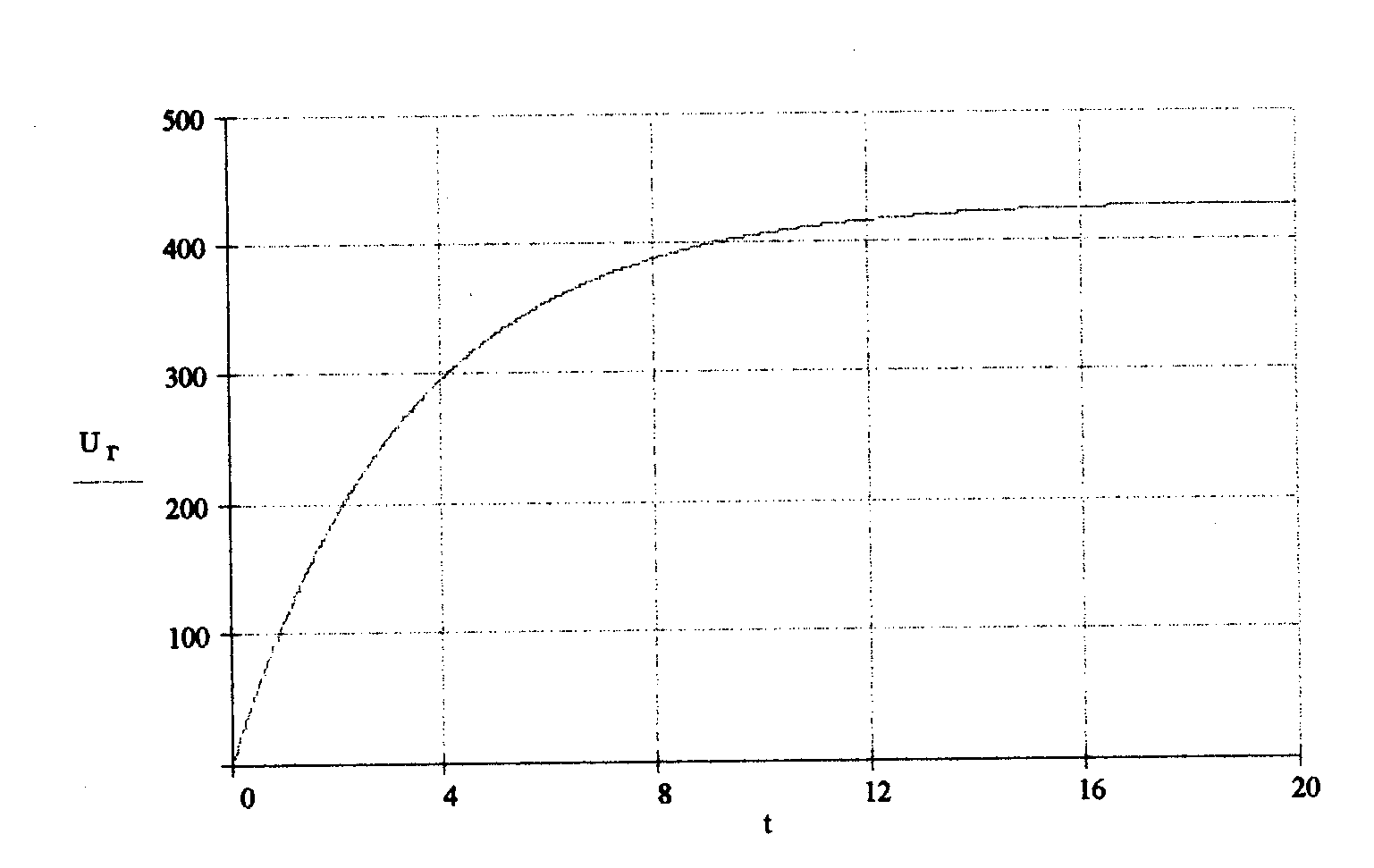
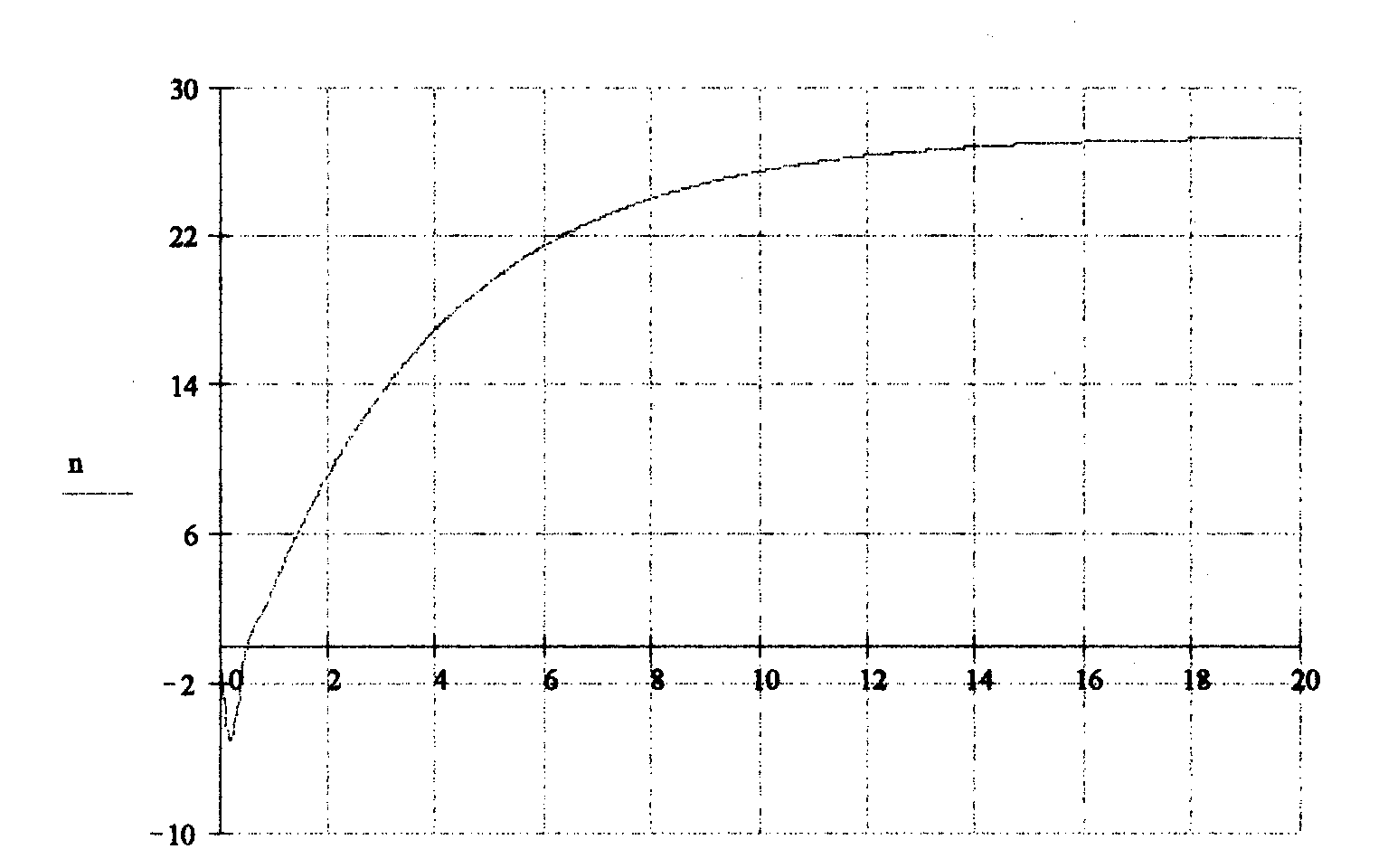
9.
Расчет динамических характеристик
привода.
П
реобразуем
исходную систему уравнений методом
подстановки.
С
делаем
замену и подставим в систему уравнений.
10. Заключение.
Выполняя данную работу, мы не только закрепили пройденный теоретический материал, но и обрели некоторые практические навыки при проектировании данной системы электропривода и расчета ее параметров, что является важнейшим фактором нашей программы обучения. Также, используя необходимую справочною литературу, мы получили действительные представления о современных систем электроприводов и о большом количестве электрооборудования, используемом в настоящее время в электроприводе на различных предприятиях, в том числе, и горных.
II. Список литературы.
1. Комплектные тиристорные электроприводы: Справочник/Под ред. В.М. Перельмутера, 1988;
2. Автоматическое регулирование. : Н.Н. Иващенко, 1978г;
3. Теория электропривода: В.И. Ключев, 1985;
4. Примеры расчетов автоматизированного электропривода/Под ред. А.В. Бошарина, 1972г.
5. Исследование характеристик электропривода по системе Г-Д с тиристорным возбуждением; методическое пособие/Под редакцией Б.В. Васильева 1986г.
t