Бетоноукладчик
Белорусский Государственный Университет Транспорта
Назначение, устройство и принцип действия бетоноукладчика.
Для укладки бетонной смеси в формы применяют различные бетоноукладчики. Бетоноукладчик с винтовым питателем предназначен для укладки бетонной смеси в формы при производстве напорных ж. б. труб методом гидропрессования. Он состоит из сварной рамы, установленной на трёх колесах. На раме смонтирован бункер, к нижней части которого прикреплён питатель. Вращение валу питателя сообщается четырёхскоростным электродвигателем через двухступенчатую коробку передач, цепную и клиноременную передачи. Перемещают бетоноукладчик от одной формы к другой вручную. Бункер бетоноукладчика загружается из бадьи, подаваемой мостовым краном, в любом месте формовочного цеха.
При изготовлении преднапряжённых конструкций на стендах транспортирование и выдача бетонной смеси осуществляются бетоноукладчиками с поворотными ленточными питателями, которые могут обслуживать одновременно два стенда. Бетоноукладчики с ленточными питателями получили наибольшее распространение на заводах железобетонных изделий.
Ленточный питатель бетоноукладчика состоит из ленточного питателя, бункера с копильником, шибера с приводом. Ленточный конвейер по ширине перекрывает всю форму. Копильник, расположенный над ленточным питателем, предназначен для выравнивания и профилирования выдаваемого из бункера слоя бетонной смеси. Поскольку высота щели бункера больше высоты выходной щели копильника, в последнем образуется подпор, обеспечивающий постоянную толщину выдаваемого слоя материала независимо от степени заполнения бункера.
Бетоноукладчик с ленточными питателями, разравнивающими и заглаживающими устройствами, применяют при конвейерной и поточно-агрегатной схемах производствах железобетонных изделий. Бетоноукладчик с ленточным питателем предназначен для распределения бетонной смеси по всей площади изделия. Он применяется на заводах, работающих по поточно-агрегатной схеме и изготавливающих многопустотные панели, ригели, лестничные площадки и другие изделия.
Бетоноукладчик состоит из сварной рамы, опирающейся на четыре колеса, два из которых приводные. На раме жёстко укреплён бункер, к нижней части которого подвешен ленточный питатель. Передняя стенка бункера, шибер и две боковые поворотные стенки образуют копильник. Размер выходной щели копильника регулируется шибером, управляемым вручную. Привод шибера состоит из штурвала, винтовой передачи и системы рычагов. Привод передвижения бетоноукладчика состоит из двухскоростного электродвигателя, двухступенчатого цилиндрического редуктора с двумя выходными концами и цепных передач. Ведущие звёздочки укреплены на ходовых колёсах.
Ленточный питатель представляет собой раму, на которой смонтированы ведущий и натяжной барабаны. На барабаны натянута бесконечная транспортёрная лента шириной 2000 мм. Верхняя ветвь транспортёрной ленты опирается на металлический лист. Привод питателя состоит из электродвигателя, редуктора, цилиндрической зубчатой передачи. Установленная мощность электродвигателей 7.3 кВт. Скорость передвижения бетоноукладчика 0.17-0.25 м/с, скорость движения ленты питателя 0.1 м/с. Вместимость бункера 1.7. м3.
При конвейерной схеме производства применяют бетоноукладчики с ленточными питателями, принципиально не отличающими от рассмотренных выше. Бетоноукладчик с поворотным ленточным питателем состоит из сварной опорной тележки, поворотной платформы и ленточного питателя. Тележка имеет четыре ходовых колеса, два из которых приводные. На ней установлен привод передвижения бетоноукладчика, привод поворота платформы и трек, служащий опорной поверхностью для колёс поворотной платформы. Привод передвижения бетоноукладчика состоит из электродвигателя, клиноременной передачи, двухступенчатого цилиндрического редуктора и зубчатых передач, ведомые шестерни которых укреплены на ходовых колёсах. Поворот платформы осуществляется лебёдкой, работающей от электродвигателя через червячный редуктор. Поворотная платформа состоит из металлической сварной рамы, на которой подвешен приёмный бункер с вибратором. На раме поворотной платформы установлены также привод питателя, привод подъёма стрелы питателя и пульт управления. На кронштейнах рамы шарнирно подвешена стрела ленточного питателя. Подъём стрелы ленточного питателя осуществляется лебёдкой с приводом, состоящим из электродвигателя и червячного редуктора.
Бетоноукладчик загружают смесью из самоходного бункера. Производительность бетоноукладчика 0.17 м3/c. Установленная мощность электродвигателей 10.7 кВт. Вместимость приёмного бункера 1.8м3. Скорость перемещения бетоноукладчика 0.2 м/c. Скорость ленты питателя 0.1 м/c.
Определение основных параметров бетоноукладчика.
Определяем силу сопротивления и мощность привода при передвижении бетоноукладчика. Сила сопротивления бетоноукладчика по рельсовому пути:
 Н
Н
G>б> – вес бетоноукладчика
G>си> – вес бетонной смеси
 =
0,0008 – коэффициент трения качения ходовых
колес
=
0,0008 – коэффициент трения качения ходовых
колес
Д = 0,3 м – диаметр колес
μ = 0,08 – коэффициент трения цапф колес
β = 2,5 – коэффициент, учитывающий трение колес о рельсы
d = 0,06 м – диаметр цапф колес.
Мощность привода бетоноукладчика:

 =
2,158 кВт
=
2,158 кВт
 –
максимальная скорость передвижения
загруженного бетоноукладчика
–
максимальная скорость передвижения
загруженного бетоноукладчика
– КПД передачи привода принимается равным 0,8 ÷ 0,9.
Объемная производительность ленточного питателя бетоноукладчика:
 =
2,5*0,15*0,1 = 0,0375 м3/с
=
2,5*0,15*0,1 = 0,0375 м3/с
Массовая производительность:
 =2,5*0,15*0,1,2400
= 90 кг/с
=2,5*0,15*0,1,2400
= 90 кг/с
В – ширина ленты питателя, м
h = 0,1÷0,2 – толщина слоя материала на ленте
 – скорость ленты м/с
– скорость ленты м/с
= 2400 кг/м3 – плотность бетонной смеси.
Определяем мощность привода ленточного питателя как сумму трех составляющих:
1) Мощность для преодоления трения лент о поддерживающий металлический лист, воспринимающий силу тяжести бетона в бункере:
 = (47380*0,1)/1000 = 4,738 кВт
= (47380*0,1)/1000 = 4,738 кВт
W>1> – сила трения ленты о поддерживающий лист:
 = 0,6*78970 = 47380 Н
= 0,6*78970 = 47380 Н
k>1 >= 0,6 – коэффициент трения резиновой ленты о сталь
Р>1> – сила активного давления бетона на ленту:
Р>1>= F>1>q>1> = 1,92*41130 = 78970 Н
F>1> – площадь активного давления, м2
F>1>= bl =1,92 м2
b = 0,8В = 2 м и l = 0,4L = 0,96 м – соответственно ширина и длина отверстия в бункере
B и L – ширина и длина ленты
q>1> – давление бетона на ленту:
 =
=
 = 41130 Па
= 41130 Па
j =24 – удельный вес бетона, кН/м3
R – гидравлический радиус, который определяет отношение площади отверстия бункера к его периметру:
 =
=
 = 0,324
= 0,324
tg - коэффициент внутреннего трения бетонной смеси, соответствующий углу естественного откоса бетона.(=20÷30)
- коэффициент подвижности бетонной смеси:
 =
= =0,406
=0,406
2) Мощность для преодоления сопротивления, вызываемого трением бетона о неподвижные борта питателя:
 =
=
 = 0,084 кВт
= 0,084 кВт
W>2> – сила трения бетона о борта питателя. Для двух бортов:
W>2> = 2K>2>Р>2> = 2*0,8*525,993 = 841,588 Н
K>2> = 0,8 – коэффициент трения бетона по стали
Р>2> – сила бокового давления на борта
Р>2> = F>2>q>2> = 0,36*1462 = 525,993 Н
F>2> – площадь бокового борта, м2
F>2> = hL =0,15*2,4 = 0,36 м2
h – рабочая высота бортов, равная высоте слоя бетона на ленте
L – длина бортов, м
Q>2> – боковое давление бетона на борта, Па
 = 0,15*24000*0,406 = 1461,6 Па
= 0,15*24000*0,406 = 1461,6 Па
3) Мощность, требуемая для транспортирования бетонной смеси по ленте, кВт:
 = 864*0,1/1000 = 0,084 кВт
= 864*0,1/1000 = 0,084 кВт
W>3> – сила сопротивления перемещению бетонной смеси по ленте, Н:
W>3> = BhK>3>jL = 2,5*0,15*0,04*24000*2,4 = 864
K>3> = 0,035 ÷ 0,04 – приведенный коэффициент сопротивления роликов опор ленты питателя. Т.к. производительность ленточного питателя:

то отсюда следует, что скорость ленты питателя:

=
 – отношение удельного веса к ускорению
свободного падения.
– отношение удельного веса к ускорению
свободного падения.
Подставив это значение в формулу, имеем мощность:
 = 90*2,4*0,04*9,8/1000 = 0,085
= 90*2,4*0,04*9,8/1000 = 0,085
L – длина питателя, м
Общая мощность электродвигателя привода ленточного питателя:
 =
=
 = 7,507 кВт
= 7,507 кВт
m = 1,1 ÷ 1,3 – коэффициент запаса мощности
= 0,8 ÷ 0,85 – КПД передачи привода.
Назначение, устройство и принцип действия виброплощадки.
Вибрационные площадки – наиболее распространённые машины, применяемые для уплотнения бетонной смеси при изготовлении железобетонных изделий. Классифицируются они по следующим признакам: характеру колебаний, типу применяемых вибраторов, грузоподъёмности, способу крепления формы или поддона.
По характеру колебаний бывают виброплощадки с круговыми гармоническими колебаниями, направленными горизонтальными гармоническими колебаниями, направленными вертикальными гармоническими колебаниями, негармоническими ударно-вибрационными колебаниями. По типу вибраторов различают виброплощадки: с дебалансными бегунками, электромагнитными и гидравлическими вибраторами.
Для крепления формы к раме виброплощадки применяют механические, электромагнитные и пневматические устройства.
Вибрационная площадка с круговыми гармоническими колебаниями состоит из вибрирующей рамы, дебалансного вала, вибраторов, опорных рам и электродвигателя. Вибрирующая рама опирается через пружины на опорные рамы. Валы вибраторов соединены между собой гибкими муфтами. Вращение вибраторам сообщается от электродвигателя через клиноременную передачу. Электродвигатель смонтирован на поворотной раме, что обеспечивает регулировку натяжения ремней. Вибрирующая рама представляет собой сварную конструкцию из двух продольных двутавровых балок и стального листа. Отверстия в верхней части рамы предназначены для монтажа и демонтажа вибраторов. Вибраторы смонтированы в подшипниках, установленных на вибрирующей раме. Каждый из вибраторов представляет собой вал, на котором укреплены два дебаланса. Вал опирается на подшипники, установленные в корпусах. Валы вибраторов соединяются гибкой муфтой, закреплённой зажимами. При работе на виброплощадках с круговыми колебаниями происходит частичное смещение бетонной смеси из-за появления дополнительных вращательных колебаний. Вследствие этого виброплощадки с круговыми гармоническими колебаниями применяются весьма ограничено.
Направленные горизонтальные колебания в вибрационных площадках создаются двумя одинаковыми вибраторами, установленными в одной горизонтальной или вертикальной плоскости и вращающимися в разных направлениях. В виброплощадках с направленными колебаниями оба вибратора должны работать синхронно и синфазно. На виброплощадках небольшой грузоподъёмности с жёсткой рамой дебалансные валы устанавливают на небольшом расстоянии один от другого в одной горизонтальной плоскости.
Вибрационные площадки с направленными вертикальными колебаниями изготавливают из отдельных унифицированных узлов: виброблоков, вибраторов, электромагнитов, муфт и т. п. Вибрационная площадка грузоподъёмностью 2 т состоит из следующих основных узлов: вибрирующей рамы, фундаментной рамы, синхронизатора и электродвигателя. Вибрирующая рама через опорные пружины опирается на фундаментную раму. Вибрирующая и фундаментная рамы – сварные, изготовленные из стального проката. На вибрирующей раме установлено два сдвоенных вибратора, соединённых между собой и с синхронизатором промежуточными валами с эластичными муфта-ми. Электродвигатель и синхронизатор расположены на отдельной фундаментной раме. В верхней плоскости вибрирующей рамы есть два отверстия, закрываемые гибкими фактурами, обеспечивающими монтаж и демонтаж вибраторов. Для крепления формы к вибрирующей раме на ней устанавливают восемь клиновых зажимов.
Вибрационная площадка с вертикально направленными колебаниями предназначена для формования железобетонных изделий размером 3*6 м.
Виброплощадка состоит из восьми отдельных, расположенных в два ряда вибростолов, четырёх синхронизаторов и четырёх электродвигателей мощностью 20 кВт.
Для крепления форм к виброплощадке применены сдвоенные электромагниты постоянного тока. Он получает питание от сети 220/380 В через селеновые выпрямители или от генератора постоянного тока небольшой мощности. Максимальное усилие притяжения каждого электромагнита 20 – 30 кН. Грузоподъёмность виброплощадки 15 т. Частота колебаний 307 рад/с; амплитуда колебаний 0,5 мм. Максимальный кинетический момент 64 Нм. Установленная мощность электродвигателей 80 кВт. В последнее время на заводах железобетонных изделий стали применять виброплощадки с направленными горизонтальными колебаниями. Эти виброплощадки отличаются от рассмотренных выше тем, что вибратор крепится не посредственно к вибрационной раме, а через пружинные ограничители. Существуют вибрационные и виброударные площадки с горизонтально направленными колебаниями. У вибрационных площадок частота вынужденных колебаний должна быть меньше частоты собственных колебаний.
В вибрационных площадках применяют также вибраторы с одним дебалансным валом и сдвоенные бегунковые вибраторы.
Расчет виброплощадки.
Находим общую регулируемую массу:
М=М>1>>1>+М>2>+М>3> = 5000*0,4+5000+3000 = 10000 кг
М – масса в килограммах соответственно в изделиях:
М>1> – с арматурой и закладными деталями
М>2> – формы
М>3> – рамы и блоков виброплощадки
При проектных работах можно принять:
М>1>М>2>=Q/2 = 10000/2 = 5000 кг
Q – грузоподъемность виброплощадки, кг
>1> = 0,25 ÷ 0,4 – коэффициент присоединения массы бетона участвующего в колебаниях
Для блочных виброплощадок:
М>3> = (0,2 ÷ 0,4)Q, тогда
М = (0,9 ÷ 1,1)Q = 1*10000 = 10000 кг
Геометрические размеры центробежных вибровозбудителей (дебалансов) вибрационных машин определяют:
Сначала находим статический момент дебаланса по формуле:
 =
=
 = 2,45 кг/м3
= 2,45 кг/м3
m – масса неуравновешенной части дебаланса
r – расстояние от центра тяжести до центра тяжести неуравновешенной части дебаланса
λ – коэффициент усиления амплитуды колебаний
 =
=
 = -1
= -1
i = f/f>0>
f – частота вынужденных колебаний виброплощадки, принимаемая равная частоте вращения n, Гц

f>0> – частота собственных колебаний системы
с – жесткость пружин виброплощадки
- угол сдвига фаз между направлением линий действия вынуждающей силы Q дебаланса и перемещения виброплощадки.
Задаваясь значениями величин А, , М и принимая λ1 находим значение статического дебаланса.
Статический момент одного дебаланса:
m1r =
 =
=
 = 0,153 кг∙м
= 0,153 кг∙м
m1 – масса одного дебаланса
е – число дебалансов
Задаваясь конструктивными размерами дебалансов определяем расстояние r от оси вращения до центра тяжести дебаланса, его массу, и толщину
Для деболанса, имеющего форму части кругового кольца
r =
Размер дебаланса рекомендуется принимать в пределах:
R>d >– 0,12 ÷ 0,16 м; r>d >– 0,06 ÷ 0,12 м; β – 90 ÷ 180
Для деболанса цилиндрической формы, т.е. выполненного в виде эксцентрика:
r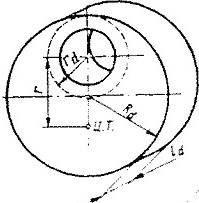 =
=
 =
=
 = 0,7 м
= 0,7 м
Толщина деболанса:
ld =
 =
=
 = 0,00056 м
= 0,00056 м
S>d> – площадь плоской фигуры деболанса.
Для деболанса формы части кругового кольца:
Sd =
Для деболанса выполненного в виде эксцентрика:
Sd = (R>d>2 – r>d>2) = 3,14(0,142 – 0,062) = 0,050 м2
- плотность материала дебаланса, для стали 7800 кг/м3
Затем определяют конструктивные размеры опорных пружин виброплощадки:
с = Мf>0>2,
т.к. f>0> = f/i,
а n = f, то:
с =
 =
=
 = 207,8 кН
= 207,8 кН
Жесткость одной пружины:
с = с/е = 207,8/16 = 12,989 кН
Геометрические размеры опорных пружин виброплощадок рассчитывают исходя из конструктивной схемы, типовой опоры с основанием, вибрируемой рамы смежным болтом или пружиной, нижней опорной жесткостью с>2>. Общая жесткость опоры с>0> = с>2> + с>1>. Для обеспечения безотрывной работы виброплощадки в зарезонансном режиме необходима предварительная затяжка пружины обеспечивающая надежный контакт пружин с вирируемой рамой при про-хождении резонансного режима во время пуска и остановки машин. В этом случае резонансная амплитуда:
А>мах> = (10 ÷ 20)А = 0,0005∙20 = 0,01
Жесткость пружин:
с>2> =
 = 653,481
= 653,481
с>1> =
= 114,969
е – число опор равное числу пружин е’
Определим частоту свободных колебаний:
W>0> = W/i = 319,6/7 = 45,66
c>0> = МW>0>2/e = 4610∙45,662//16 = 512300
W = 2n = 2∙3,14∙47 = 319,6
i = 7
Определяем число витков пружины:
z =
 =
=
 = 1325
= 1325
z – число пружин
G>ст> – модуль сдвига стали равный 85000 МПа
d – диаметр проволоки пружины
Д = 0,15 ÷ 0,3 – диаметр пружины
Приемлемое число витков подбирают соблюдая условие:
Р/d ≥ 4
Общее число витков обычно принимают с учетом дополнительных крайних поджатых витков.
Сила притяжения электромагнитов виброплощадки:
Р = К(Мg – F>0>) = 0,4(4160∙9,8 – 5107,85) = 14264,06 Н
К = 0,4 – коэффициент запаса
F>0> – вынуждающая сила
F>0> = mrW>0>2 = 2,45∙45,662 = 5107,85 Н
Вычислим мощность необходимую для уплотнения бетонной смеси:
N>1> = m2r2W2sin2/(2М) = 58,192*0,062*319,62*sin(2*25)/(2*4160) = 58144,6 Вт
Мощность необходимая для преодоления сил трения:
N>2> = F>тр>dW/2
d – диаметр беговой дорожки внутреннего кольца подшипника качения
F>тр> – сила трения в подшипниках качения
= 0,005 – приведенный коэффициент
Q – вынуждающая сила
N>2> = mrW3d/2 = 0,005*2,45*319,63*0,06/2 = 11997 Вт
Суммарная расчетная мощность электродвигателя:
N =
 =
=
 = 73,83 кВт
= 73,83 кВт
= 0,9 ÷ 0,95.