Расчет преобразователя
Содержание
|
1. Техническое задание |
3 |
|
2. Выбор конструкции и материала преобразователя |
4 |
|
3. Расчет элементов излучателя |
9 |
|
3.1. Выбор материала и конструкции |
9 |
|
3.2. Расчет параметров преобразователя |
10 |
|
3.3. Расчет параметров ПЭ преобразователя |
13 |
|
3.3.1. Расчет энергетических характеристик преобразователя |
13 |
|
4. Конструкция преобразователя |
17 |
|
Литература |
18 |
1. Техническое задание
Необходимо выбрать конструкцию и материал преобразователя, который работает в воздушной среде в импульсном режиме, способен излучать большую удельную мощность в диапазоне частот 25-45 Кгц.
Выбор конструкции и материала преобразователя
Чтобы реализовать данные условий целесообразно использовать биморфный преобразователь, работающий на принципе изгибных колебаний, данный излучатель способен работать на высоких частотах и излучать большую удельную мощность.
Простейший биморфный элемент представляет собой две склеенные пьезоэлектрические пластины, свободно опертые по периметру (рис, 1а). Поскольку знак деформации (сжатие или растяжение) зависит от полярности электрического напряжения, то электроды можно соединить так, что под действием переменного напряжения одна пластина будет стремиться растягиваться, а другая — сжиматься, в результате создается изгибающий момент и пластины будут изгибаться (рис. 1,а).
Поперечные колебания изгиба дают возможность получить малогабаритную колебательную систему и преобразователь в целом. На рис. 1,6 показан дисковый пластинчатый преобразователь, состоящий из металлического диска 1 (для упрочнения) и двух приклееных к нему круглых пьезобиморфных пластин 2; колебательная система помещена в корпус 3, нижняя пластина – в заливочную массу 4.
Принцип действия. Для возбуждения колебаний изгиба механической системы в режиме излучения необходимо создать в ее поперечных сечениях изгибающие моменты. Для обеспечения режима приема надо соединить электроды таким образом, чтобы именно механические напряжения, вызванные деформациями изгиба пластин, преобразовывались в электрические сигналы.
Этим требованиям отвечают механические колебательные системы в виде биморфных элементов, состоящих из разнородных пластин, жестко связанных плоскостями, и отличающихся электрическими или механическими свойствами. Если в одной из пластин создать напряжения сжатия Т, укорачивающие ее длину, одновременно в другой—напряжения растяжения, растягивающие ее, то возникнут изгибающие моменты М относительно срединной плоскости пластин (рис. 1, а).
При приеме под действием падающей акустической волны биморфный элемент изгибается на несущих опорах и в пьезокерамических пластинах возникают механические напряжения Т, преобразуемые ими в электрические сигналы (рис. 2,б).
Если для создания механических колебаний (или преобразования механических напряжений в электрические сигналы) используют пьезоэлектрические пластины, электроды в биморфном элементе надо соединить определенным образом. При этом необходимо учитывать взаимные направления полей первоначальной поляризации пластин (вектор Ео), возникающих механических напряжений -(Т) и напряженности внешнего рабочего электрического (вектор Ео).
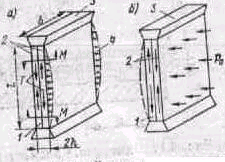
Рис.1. Схема конструкции преобразователя работающего на колебаниях изгиба
Варианты соединения электродов в биморфном элементе, образованном пьезокерамическими пластинами, приведены на рис. 4.16, а, б. Полярность электрических зарядов, возникающих на электродах 3, показана условно. Отличия в электрических свойствах соединяемых пьезопластин создаются выбором взаимных направлений полей поляризации Еу к рабочего Е. Если направления вектора £o и мгновенное значение вектора Е в одной из пластин совпадают, то в ней возникнут механические напряжения одного направления (например, сжатия), в этот момент в другой пластине, где Ец и Е направлены встречно, возникнут напряжения противоположные (растяжения). Этим и обусловлено создание изгибающего момента в поперечных сечениях пластин.
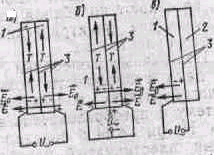
Рис. 2. Способы соединения пластин в преобразователе
Па рис.2,а показан биморфный элемент в виде соединения двух пластин, одна (1) из которых пьезоактивна, другая (2) изготовлена из пассивного материала, например металла или диэлектрика, Изгибающий момент в таком биморфном элементе возникает при создании электрического поля (и деформации) в пластине 1, при этом пластина 2, называемая подложкой, не изменяет своих размеров. В режиме приема деформация изгиба пластины / вызывает механические напряжения, которые приводят к появлению разности потенциалов на электродах 3. Подобную колебательную систему называют полупассивной.
Таковы физические предпосылки создания механических колебательных систем, реализующих принцип действия пластинчатых преобразователей.
На практике для наибольшей эффективности пластинчатых преобразователей стремятся создать условия закрепления биморфных элементов, близкие к свободному опиранию краев.
Так, для одного и того же прямоугольного биморфного элемента при двух свободно опертых краях и двух свободных собственное число для низшей частоты Xi = 3,14, а при двух жестко заделанных краях—Xi -= 4,73, что соответствует различию их резонансных частот в (4,73/3,14)2 = 2,27 раза.
Чтобы рассчитать электроакустические характеристики и параметры пластинчатого преобразователя с помощью эквивалентной электромеханической схемы необходимо знать его эквивалентные параметры: массу м>экв>, гибкость Сэкв и КЭМТ N. Их определяют в каждом конкретном случае через формы колебаний, размеры и упругие параметры биморфных элементов.
Круглые преобразователи. Основные элементы пластинчатых преобразователей подобного типа — круглые в плане биморфные элементы, работающие на поперечных колебаниях изгиба.
Реальные конструкции круглых пластинчатых преобразователей содержат кроме механических колебательных систем — пьезокерамических биморфных элементов еще опоры, с которыми эти элементы соединены, герметизирующие металлические мембраны и покрытия, электроизоляционные прослойки и электрические вводы.
На рис. 3 показана широко распространенная конструкция круглого пластинчатого преобразователя-приемника. Для реализации условий свободного опирания биморфных элементов колебательная система выполнена симметричной. Биморфные элементы собирают из пьезокерамических пластин 2, которые через электроизоляционную прослойку 3 склеивают эпоксидным клеем с металлической подложкой 4. Подложку вместе с круглым корпусом—опорой 7 изготавливают в виде одной детали. Затем две таких детали сваривают по периметру, а внутренний объем б между ними образует воздушный экран. К наружным плоскостям пьезокерамических пластин приклеивают элементы электроизоляции и мембраны 6. Ввод—кабель 1 приваривают и при-вулканизовывают к корпусу. Заключительная операция изготовления преобразователя—приварка торцов мембран к круглому корпусу по периметру.
Р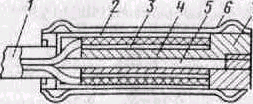
ис.
4. Поперечное сечение круглого симметричного
преобразователя
Малогабаритные конструкции преобразователей выполняют более простыми. Кольцевые опоры изготавливают методом прессования, например из пресс-порошка АГ-4с. К опорам симметрично приклеивают биморфные элементы. Герметизируют конструкцию заливкой компаундом или с помощью резинового чехла.*
Расчет элементов излучателя
3.1. Выбор материала и конструкции
Для данного излучателя подойдет материал типа ЦТСНВ – 1, выбор его обусловлен, большим значением d>31>, данный параметр влияет на эффективность преобразователя.
Таблица 3.1
Значения постоянных пьезоэлектрического материала ЦТСНВ-1
|
Постоянная |
EE>ю1>*10-11,Па |
SE>11>*1012,м2/Н |
СЕ>1>,м/с |
|
d>31>,1010 |
K>31> |
|
Значение |
0,62 |
16,3 |
2900 |
2200 |
2 |
0,34 |
|
Постоянная |
tg , % |
|
Q>M> |
|||
|
Значение |
1,9 |
0,38 |
60 |

Материал для пассивного элемента выбираем из условия что он должен выдерживать большие нагрузки. Для этого подойдет титановый сплав.
Таблица 3.2
Значения постоянных пассивного материала ЦТСНВ-1
|
Постоянная |
, кг/м3 |
С>зв>, м/с |
Е>Ю>, Па |
|
|
Значение |
4500 |
6000 |
1,1*10-11 |
0,35 |
Э
скиз
преобразователя
1 – пьезокерамическая пластина;
2 – пластина из титановоо сплава.
Данный преобразователь работает на изгибные колебания.
Расчет параметров преобразователя
Резонансная частота однородной пластины совершающей колебания изгиба определяется как:
 3.1
3.1
где с – скорость звука в пластине, а – радиус пластины.
Отсюда можно рассчитать толщину пластины:
 3.2
3.2
Так как пластина полуактивная, то ее толщина будет меньше, потому что скорость звука в титане больше скорости звука в ЦТСНВ-1.
Толщину титановой пластины возьмем t>т>=0.5*10-3м.
Тогда можно рассчитать резонансную частоту такой системы, приняв ее за многослойную.
Определяем положение нейтрали Z>0>, в которой при изгибе механическое напряжение равно «0»:
 3.3
3.3
г
де
EE>1>,
E>Ю>-
модули упругости для ПК и титана
соответственно.
2. Определяем приведенные коэффициенты Пуассона
 3.4
3.4
>K>, >T >– коэффициенты Пуассона для ПК и титана.
3
.
Определяем приведенную приближенную
жесткость
D=41.997 H*м
Площадь излучателя равна S=a2=3,14(510-2)2=0,7810-4 м2.
Определим массу составленной пластины M=a2(>k>t>k+>>т>t>т>)=0.09 кг.
О пределим
резонансную частоту.
пределим
резонансную частоту.
3.5
Резонансные частоты пластинчатых преобразователей зависят от геометрических соотношений и от упругих постоянных материалов биморфных элементов.
где - коэффициент, зависящий от способа закрепления пластин*.
Наш излучатель по контуру закреплен с помощью резиновой полосы, тогда =0,22.

, резонансная частота собранного преобразователя.
Видно что разброс составил 6176 Гц.
3.3. Расчет параметров ПЭ преобразователя
Расчет данных параметров производим исходя из рассчитанных геометрических расчетов выполненных до этого. Для выбора рассчетных формул необходимо знать отношение h/a (толщины пластины к радиусу).
h/a=(t>k>+t>T>)/a=0.293<0.3
При выполнении данного условия пластина называется тонкой и поэтому дальнейший расчет производится по следующим формулам:
 Данные
расчеты произведенны для нахождения
эквивалентных параметров излучателя.
Здесь С>экв>-эквивалентная гибкость,
m>экв>- эквивентная
масса.**
Данные
расчеты произведенны для нахождения
эквивалентных параметров излучателя.
Здесь С>экв>-эквивалентная гибкость,
m>экв>- эквивентная
масса.**
3.3.1. Расчет энергетических характеристик преобразователя
Для этого необходимо задаться значением удельной мощности, которая для преобразователя такого типа примерно равна W>ак.уд>=40 Вт/м, тогда акустическая мощность определяется по формуле W>ак>= W>ак.уд>S=404,5310-3.
Рис. 5. Эквивалентная схема преобразователя
С>0 >- электрическая емкость преобразователя;
R – сопротивление электрических потерь;
n – коэффициент электромеханической трансформации;
С>ЭКВ >– эквивалентная гибкость;
m>ЭКВ> – эквивалентная масса;
r>S> – сопротивление излучателю;
r>мп> – сопротивление механических потерь.
С другой стороны ем. мощность будет равна:
где
 .
.
Для одноконтурной эквивалентной схемы составляем следующее уравнение:
 3.6
3.6

где
Для преобразователей работающих на воздушную среду КПД =0,3, тогда U>раб>=9 В.
Чувствительность в режиме излучения равна:
 3.6
3.6
где P-давление на оси излучения при r=1м.
K>0>=4S/2=41.
Чувствительность >0>=1.284 Па/В.
Электро-механическое КПД
Электрическая мощность преобразователя:
Полное сопротивление преобразователя равно:
где R>M>=(r>S>+r>мп>)/>ам>n=6,693 (кг/с),
тогда R>W>=6.688(Ом).
Добротность преобразователя вычисляется по формуле:***
 3.7
3.7
По определению добротность равна также отношению частоты к диапазону ее изменения. Поэтому получается, что f=f/Q=9157 Гц., т.е. данный преобразователь работает в широком диапазоне частот 9157 Гц от заданной частоты. Данный результат позволяет использовать пр-ль в нашем устройстве.
Конструкция преобразователя
Рис. 6. Конструкция преобразователя
1 – пьезокерамическая пластина из материала ЦТСНВ-1;
2 – корпус преобразователя;
3 – резиновое кольцо;
4 – титановая пластина.
Конструкция данного преобразователя обладает хорошими механическими качествами и проста в изготовлении. Пьезокерамическая пластина (1) из материала ЦТСНВ-1 склеивается с пластной из титанового сплава(5) эпоксидным клеем, и с пощью корпуса (2) закрепляется. Для лучшего прижима исполбзуется резиновое кольцо (3). Пластмассовый корпус состоит из двух соединяемых с помощью клея или болтов частей. Выбор данной форму корпуса обусловлен использованием его в качестве поглощаюшего экрана. Он позволяет получить широкую характеристику направленности.
Литература
1. Свердлин Г.М. Прикладная гидроакустика: Учеб. пособие. – 2-е изд., перераб. и доп. – Л.: Судостроение, 1990. – 320 с., ил.
2. Римский – Корсаков А. В. Электороакустика . М., “Связь”, 1973. 272 с. с ил.
3. Аронов Б.С. Электромеханические преобразователи из пьезоэлектрической керамики. – Л.: Энергоатомиздат. Ленинградское отд-ние, 1990. – 272 с: ил.
4. Справочник по гидроакустике / А.П. Евтютов, А.Е. Колесников, Е.А. Корепин и др. – 2-е изд., перераб. и доп. – Л.: Судостроение, 1988. – 522 с.: ил. – (Библиотека инженера-гидроакустика).
* Л1 стр. 282
* Л1 стр. 287
** Л1 стр.287-288
*** Л2 стр. 27