Об ориентационном взаимодействии спиновых систем
Об ориентационном взаимодействии спиновых систем
Валерий Эткин
Введение
В предыдущей статье [1] при анализе результатов экспериментов по изучению ядерного магнитного резонанса в системе ядерных спинов [2, 3] был сделан вывод о несводимости обнаруженного в экспериментах спин-спинового взаимодействия к теплообмену, а также к электрическому или магнитному мультипольному взаимодействию. Специфика этого взаимодействия, названного нами ориентационным, проявилась в передаче упорядоченной ориентации одной системы ядерных спинов другой и в самопроизвольном установлении при этом единой «средневзвешенной» ориентации различно (в том числе противоположно) направленных спинов. Специфичность этого взаимодействия признается и квантовой механикой, согласно которой главную роль в установлении спин-спинового равновесия играет некоторое особое взаимодействие, названное обменным. Так называют взаимное влияние тождественных частиц, которое обусловлено действием так называемых обменных сил и присутствует даже в случае, если прямым силовыми (электрическим, магнитным) взаимодействием частиц можно пренебречь [4]. Однако обменные силы становятся заметными только тогда, когда среднее расстояние между частицами становится сравнимым с длиной волны де Бройля. Поэтому представляет интерес показать, что ориентационное взаимодействие спиновых объектов имеет место и в макромире.
Ориентационная составляющая потенциальной энергии
Известно, что различные положения тела в пространстве и его различные ориентации в нем с механической точки зрения не эквивалентны [5]. Изучению ориентационной составляющей энергии системы (т.е. той её части, которая зависит от взаимной ориентации её частей) до настоящего времени уделялось недостаточно внимания. Возможно, это было связано с тем, что для решения многих практических задач законы движения тел было удобнее сводить к законам движения отдельных материальных точек, ориентация которых в пространстве уже не имела значения. Это позволяло ограничиться рассмотрением так называемых центральных полей, потенциальная энергия которых U(r) зависела только от расстояния между телами (от радиус-вектора центра их инерции r). Иное дело, когда в качестве объекта исследования выбирается вся совокупность взаимодействующих (взаимно движущихся) тел. Именно к ней как к замкнутой системе и относятся законы сохранения. Рассмотрим, в частности, законы сохранения импульса P и момента импульса L замкнутой механической системы, состоящей из k–х тел (k=1,2,...,К):
 (1)
(1)
где P>k>=m>k>v>k>;L>k>=r>k>×P>k> – импульс k-го тела и момент его импульса; r>k>, m>k>, v>k> – радиус-вектор, масса и скорость центра инерции тела.
Согласно (1), изменение импульса P>k> или момента импульса L>k> любого из тел замкнутой системы невозможно без равных им по величине и противоположных по знаку изменений импульса или момента импульса всех остальных тел в тот же момент времени. С учетом конечной скорости взаимодействия это означает наличие соответствующих полей сил F>k>=dP>k>/dt и крутящих моментов M>k>=dL>k>/dt во всех точках рассматриваемой системы.
Параметры P>k> и L>k> можно представить в виде произведения их модулей P>k>=|P>k>| и L>k>=|L>k>| и единичного вектора e>k>, характеризующего их направление, т.е. P>k>=Pe>k> и L>k>=Le>k>. Если классифицировать процессы по особым, не сводимым к другим изменениям состояния, которые они вызывают, то следует признать, что производные по времени t от параметров системы P>k> и L>k> характеризуют, вообще говоря, два различных процесса. Один из них – процесс ускорения соответственно поступательного и вращательного движения e>k>(dP>k>/dt) и e>k>(dL>k>/dt), выражающийся в изменении величины импульса P>k> или его момента L>k> при неизменном их направлении e>k>. Другой – процесс переориентации этого движения P>k>(de>k>/dt) и L>k>(de>k>/dt), выражающийся в изменении направления векторов P>k> и L>k> при неизменной величине самого импульса P>k> или его момента L>k>. Следовательно, изменение направления скорости v>k> или момента импульса L>k> каждого из тел рассматриваемой системы также с необходимостью сопровождается переориентацией импульса или момента импульса всех других тел данной системы. Силы, порождающие поля F>k> и M>k>, принципиально отличаются по своей природе. Если, например, ускорение тела осуществляется полем центральных сил F>k>, являющихся полярными векторами, то процесс его переориентации (поворота) – центростремительными силами, силами Кориолиса или магнитной составляющей силы Лоренца, являющимися аксиальными векторами. Принято считать, что эти последние силы не совершают никакой работы, поскольку они всегда направлены по нормали к вектору скорости тела v>k>. Отсюда якобы следует, что не существует какой-либо формы энергии, соответствующей этим силам. Между тем в замкнутой системе действуют лишь пары таких сил, т.е. крутящие моменты M>k>, которые и совершают работу переориентации тел. Действительно, элементарное изменение положения любой материальной точки твердого тела ds можно представить в виде суммы члена dR, характеризующего поступательное движение тела относительно неподвижной системы отсчета, и вектора dφ×r, характеризующего его поворот вокруг мгновенной оси вращения на бесконечно малый угол dφ (где r – радиус-вектор точки в подвижной (сопутствующей) системе координат) [2]:
ds = dR + dφ×r. (2)
Согласно (2), элементарная работа dW>k>=F>k>·ds>k> какой-либо результирующей силы F>k> также складывается из работы смещения тела F>k>·dR>k> и работы его поворота F>k>·(dφ>k>×r>k>)=M>k>·dφ>k>, где M>k>=dL>k>/dt=r>k>×F>k> – крутящий момент, действующий на k-е тело. Таким образом, переориентация тел осуществляется полем моментов M>k> и также связана с совершением определенной работы, Это свидетельствует о существовании специфической составляющей потенциальной энергии, которую уместно назвать ориентационной энергией.
Наличие поля крутящих моментов M>k>, передающего изменение ориентации одних тел другим, свойственно, вообще говоря, любым упорядоченным формам энергии. Известно, например, что поляризация диэлектриков сопровождается не только разделением в пространстве положительных и отрицательных зарядов (т.е. созданием диполей), но и переориентацией по полю уже имеющихся «жестких» диполей с неизменным плечом [6]. На это расходуется часть работы поляризации dW>е>=E·dZ>e>, где E – напряженность электрического поля, Z>e> – вектор поляризации. Эта часть в соответствии с вышеизложенным определяется выражением dW>е>=Z>e>E·de и может быть представлена в виде произведения действующего на электрический диполь крутящего момента M>Е> на элементарный угол его поворота dφ>е> в поле E. Точно так же в процессе намагничивания наряду с изменением плеча магнитных диполей происходит их переориентация во внешнем магнитном поле H. Затрачиваемая на это работа dW>м>=Z>м>H·de (где Z>м> – модуль вектора намагничивания Z>м>) также может быть представлена в виде произведения действующего на магнитный диполь крутящего момента M>Н> на угол его поворота dφ>м>. Таким образом, в электрических и магнитных полях помимо центральных сил всегда можно выделить ориентационную составляющую, действующую на тела с несферической симметрией. Это относится в полной мере и к гравитационным полям. Рассмотрим, например, потенциальную энергию U(r) гантели с массой грузов m и расстоянием между ними l, расположенных в поле тяжести Земли с массой М на расстоянии r:
E>1>(r) = –2GMm/r, (3)
где G – гравитационная постоянная.
Однако, если тот же стержень повернуть вокруг неподвижного центра масс в вертикальное положение, координаты центров массы его половинок будут равны соответственно:
r>1> = r + l/2 и r>2> = r – l/2,
а потенциальная энергия примет значение:
E>2>(r) = –GMm[1/(r + l/2) + 1/(r – l/2)], (4)
т.е. изменится на величину:
E>2>(r) – E>1>(r) = –(2GMm/r)[l/(r – l/2) + l/(r + l/2)]. (5)
Отсюда следует, что поворот в поле тяжести тел с несферической симметрией также требует затраты некоторой работы, связанной с переходом потенциальной энергии центральных сил в ориентационную энергию и обратно. Таким образом, ориентационная составляющая потенциальной энергии систем присуща в принципе всем известным силовым полям. Существование наряду с полем центральных сил F>k> поля моментов M>k> приводит к тому, что потенциальная энергия тела U=U(r, φ) включает в себя в общем случае две составляющие, зависящие соответственно от положения тела U=U(r) и его ориентации U=U(φ). Это означает, что потенциальная энергия силовых полей является в общем случае функцией шести переменных – трех координат центра инерции и трех углов, определяющих ориентацию тела относительно неподвижной системы отсчета [7].
Ориентационная энергия спиновых систем
Вывод о существовании ориентационной составляющей энергии выглядел бы достаточно банальным, если бы он относился только к известным силовым полям. Значительно интереснее показать, что эта составляющая энергии присуща и вращающимся телам независимо от наличия у них упомянутых выше форм энергии. С этой целью рассмотрим систему вращающихся тел с несферической симметрией (уравновешенный волчок или гироскоп – центр тяжести которого совпадает с центром подвеса). Предположим, что момент количества движения любого k-го тела такой системы L>k> по каким-либо причинам не совпадает с собственной осью его вращения, так что оно помимо вращения вокруг собственной оси с постоянной угловой скоростью Ω>k> испытывает регулярную прецессию с угловой скоростью ω>k> относительно направления вектора момента его количества движения L>k> (рис.1).
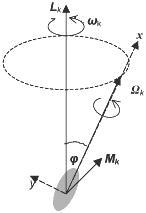
Рис. 1.
Воспользовавшись произвольностью выбора осей координат, совместим вслед за [2] ось x с осью симметрии волчка, а ось y – с плоскостью, образованной векторами L>k> и Ω>k>, как это показано на рисунке. Тогда угловая скорость вращения волчка вокруг собственной оси Ω>k> = |Ω>k>| и угловая скорость его прецессии ω>k>=|ω>k>| определятся соотношением [2]:
Ω>k> = L>k>cosφ/I>x>; ω>k> = L>k>/I>y>, (6)
где L>k> = |L>k>|; I>x>, I>y> – моменты инерции волчка относительно осей x и y; φ – угол, образованный векторами L>k> и Ω>k>.
Этим угловым скоростям соответствуют кинетические энергии собственного E>k>c и прецессионного E>k>п вращения, равные:
E>k>c = L>k>2 cos2φ/2I>x>; E>k>п = L>k>2/2I>y>. (7)
Таким образом, суммарная кинетическая энергия рассматриваемого волчка
E>k> = E>k>c + E>k>п = ΔE>k> = L>k>2(cos2φ + I>x>/I>y>)/2I>x>, (8)
является в общем случае функцией не только количества движения L>k>, но и угла φ, определяющего ориентацию оси его собственного вращения в пространстве E>k>=E>k>(L>k>,φ).
Сопоставляя E>k>(L>k>,φ) с величиной E>k0>=L>k>2/2I>x> при том же значении L>k> и φ=0, находим:
ΔE>k> = E>k> – E>k0> = L>k>2(cos2φ + I>x>/I>y> – 1)/2I>x> = L>k>2(I>x>/I>y> – sin2φ)/2I>x>. (9)
Согласно (8), при sinφ<(I>x>/I>y>)0,5 кинетическая энергия прецессирующего волчка E>k> превышает таковую в отсутствие прецессии (при φ=0). Это означает, что для возбуждения прецессионного движения необходимо затратить определенную работу. В условиях замкнутой системы с неизменным суммарным моментом количества движения L>0>=ΣL>k0> это может быть вызвано только превращением в кинетическую потенциальной энергии взаимной ориентации тел U=U(φ). Вычислить эту работу и тем самым найти изменение ориентационной энергии можно из следующих соображений.
Известно, что прецессия волчка или гироскопа (т.е. дополнительное вращение их вокруг оси, не совпадающей с осью собственного вращения) возникает, когда к ним приложен определенный крутящий момент M>k>=dL>k>/dt. Работа dW>k>=–M>k>·dφ, которая затрачивается на отклонение оси гироскопа от его первоначального положения (при φ=0) в условиях Ω>k>=const и L>k0>=I>x>Ω>k>=const, равна, очевидно, дополнительной кинетической энергии dE>k>п=ω>k>dL>k>, которую приобретает гироскоп в результате прецессии. При этом величина угловой скорости прецессии ω>k>=|ω>k>| определяется известным соотношением [4]:
ω>k>=M>k>/I>x>Ω>k>·sinφ. (9)
Подставляя (9) в выражение dE>k>п и приравнивая последнее величине dW>k>, получим:
dL>k> = L>k0>sinφ·dφ, (10)
Интегрируя это выражение в пределах от φ=0 до φ в условиях постоянства L>k>, имеем:
 (11)
(11)
Поскольку при φ=0 прецессия отсутствует, C=1, так что окончательно получаем:
L>k> = L>k0>(1 – cosφ). (12)
Согласно этому выражению, по мере увеличения угла φ под действием крутящего момента M>k> момент количества прецессионного движения L>k> также возрастает. Следовательно, с возникновением прецессии у вращающихся тел появляется дополнительная кинетическая энергия внутреннего вращения Eω. Таким образом, кинетическая энергия прецессионного движения E>k>(φ) может служить мерой «разориентации» системы вращающихся тел. В этом порядке идей совершенно естественным выглядит тот факт, что прецессия прекращается с исчезновением крутящих моментов M>k>. Это соответствует наступлению ориентационного равновесия в системе взаимодействующих тел, т.е. состояния, характеризующегося одинаковой ориентацией осей вращения тел или частиц. При «раскрутке» гироскопов направление L>k> у них не изменяется, т.е. ориентационное равновесие не нарушается. Потому-то уравновешенные гироскопы и не изменяют в дальнейшем своей ориентации. Напротив, возникновение прецессии вращающихся тел свидетельствует об отсутствии в системе ориентационного равновесия и о наличии в ней поля крутящих моментов M>k>. Источником возмущения при этом может служить, например, относительное движение тел, а в микромире – тепловое движение частиц. Это и объясняет, почему в упомянутых выше экспериментах для достижения спин-спинового равновесия требовались достаточно низкие температуры.
Обсуждение результатов
Зависимость всех упорядоченных форм энергии от взаимной ориентации тел с несферической симметрией свидетельствует о существовании в природе специфического ориентационного взаимодействия и соответствующего ему ориентационного равновесия. Специфика этого взаимодействия (независимо от его физической природы) состоит в стремлении к установлению единой ориентации осей симметрии тел (а для вращающихся тел – единой ориентации осей их вращения), соответствующей минимальному значению поля крутящих моментов (ориентационного поля) M(r,φ). Это поле не следует смешивать с гипотетическим торсионным полем (полем кручения), порожденным различной плотностью угловых скоростей Ω>k> или моментов вращения (спинов) тел и частиц L>k> [6]. В отличие от последнего, поле M(r,φ) является составляющей известных силовых полей, т.е. присуще и неподвижным телам. Далее, оно существует и в системе тел (частиц), вращающихся с одинаковой угловой скоростью Ω>k>. Кроме того, оно направлено по нормали к Ω>k> и вызывает не ускорение, а переориентацию вектора их угловой скорости, т.е. изменяет ω>k>, а не Ω>k>. При этом наглядным проявлением отсутствия ориентационного равновесия является возникновение в спиновых микро- и макросистемах прецессионного движения.
Дальнодействие полей M(r,φ) определяется их конкретной физической природой и в принципе ограничено. Однако это ограничение не относится к волнам, возникающим при осцилляции этих полей. В частности, при осцилляции электромагнитных полей возникают электромагнитные волны, а при нарушении спинового порядка – так называемые спиновые волны, также обнаруженные экспериментально у целого ряда веществ [4]. Сфера распространения волн определяется, как известно, исключительно свойствами проводящей их среды, и для сред типа физического вакуума (с пренебрежимо малой диссипацией ориентационной энергии) может быть практически неограниченной. Поэтому ввиду направленного характера и возможности накопления ориентационного воздействия (в отличие от хаотических возмущений) оно может оказаться достаточным для упорядочивания не только микро, но и макросистем.
Наличие ориентационных полей и взаимодействий объясняет целый ряд явлений, начиная от выстраивания в одной плоскости колец Сатурна до явления спонтанного намагничивания ферромагнетиков. Однако более важным представляется вывод о существовании в Природе наряду с тенденцией к превращению упорядоченных форм энергии в тепловую противоположной тенденции к установлению порядка, обусловленной наличием полей M(r,φ) и ориентационных взаимодействий. Это положение не следовало из классической, статистической и неравновесной термодинамики [7] и является существенным дополнением к ним. Его учет проливает новый свет на процессы «самоорганизации» объектов живой и неживой природы, на противоположные диссипативным процессы в ряде областей Вселенной и другие явления, казавшиеся странными с позиций современного естествознания.
Список литературы
ЭткинВ.А. О специфике спин-спинового взаимодействия. НиТ, 2002.
RamseyN.F. Thermodynamics and Statistical mechanics by Negative Absolute Temperature. // Phys. Rev. – 1956. – V.103. – №1. – р.279.
АбрагамА., ПрокторУ. Спиновая температура. // Проблемы современной физики. – М., 1959. – Вып.1. (A.Abragam, W.Proctor. Spin Temperature. // Phys. Rev., 109, 1441...1458 (1958)).
Физический энциклопедический словарь. – М.: Советская энциклопедия, 1984.
ЛандауЛ.Д, ЛившицЕ.М. Теоретическая физика, Т.1 (Механика). М.:Наука, 1973
АкимовА.Е. Эвристическое обсуждение проблемы поиска новых дальнодействий. EGS-концепции. – М., МНЕЦВЕНТ 1992. Препринт №7А, 63с.
ЭткинВ.А. Термокинетика (термодинамика неравновесных процессов переноса и преобразо вания энергии). Издание 2-е. – Тольятти, 1999, 228с.